Изобретение относится к точному приборостроению и может использоваться для определения положения истинного меридиана на основе фиксации максимальной угловой скорости перемещения чувствительного элемента гирокомпаса.
Известны устройства для определения положения истинного меридиана, имеющие в своем составе в качестве чувствительных элементов различного рода гироскопические устройства [1] .
Наиболее близким к предлагаемому по техническому решению является устройство для определения положения динамического равновесия колебаний чувствительного элемента гирокомпаса [2] , состоящее из гирокомпаса с чувствительным элементом и следящим корпусом, а также кодовой системы, в которой фотоэлектрический датчик импульсов представляет собой фотооптическое устройство, состоящее из оптической решетки, образованной двумя лимбами, один из которых подвижен, а другой - нет, выполненными в виде дисков со светопроницаемыми рисками, источника света и светочувствительных элементов-фотодиодов. Диски закреплены соответственно на следящем корпусе и корпусе устройства.
Недостатком данных устройств является недостаточно высокая точность определения положения динамического равновесия колебаний чувствительного элемента гирокомпаса.
Целью изобретения является повышение точности определения положения динамического равновесия колебаний чувствительного элемента гирокомпаса.
Цель достигается тем, что в устройстве для определения положения динамического равновесия колебаний чувствительного элемента гирокомпаса, содержащем гирокомпас с чувствительным элементом, следящим корпусом и кодовую систему, в которой фотоэлектрический датчик импульсов представляет собой фотооптическое устройство, состоящее из оптической решетки, образованной двумя лимбами, один из которых подвижен, исполненными в виде дисков со светопроницаемыми рисками, источника света и светочувствительных элементов-фотодиодов, второй лимб установлен с возможностью вращения относительно первого с равной угловой скоростью в противоположном направлении.
На фиг. 1 показана функциональная схема устройства; на фиг. 2 - часть гирокомпаса со встроенными в него фотоэлектрическим датчиком.
Устройство содержит (фиг. 1) гирокомпас 1 с чувствительным элементом 2 и следящим корпусом 3, кодовую систему 4 с фотоэлектрическим датчиком 5 импульсов, генератором 6 импульсов стабильной частоты, компаратором напряжения 7 и сравнивающим логическим устройством 8.
Следящий корпус 3 (фиг. 2) в верхней части имеет зубчатый венец 9. Чувствительный элемент 2 соединен со следящим корпусом 3 посредством торсиона 10.
Фотоэлектрический датчик 5 импульсов включает источник света 11, первый лимб 12 с рисками для прохождения света и коническим зубчатым концом 13, второй лимб 14 с рисками, коническим зубчатым венцом 15, и цилиндрическим зубчатым венцом 16, коническую шестерню 17 с осью вращения 18, ось вращения лимбов 19, валик 20 с первой шестерней 21 и второй шестерней 22, фотодиоды 23.
Устройство работает следующим образом.
При разарретировании чувствительного элемента 2 его гиромотор под действием силы тяжести и силы, обусловленной суточным вращением Земли, начинает процессировать в сторону истинного меридиана. Вместе с гиромотором поворачивается и чувствительный элемент 2. Следящий корпус 3 отслеживает поворот чувствительного элемента 2.
При повороте следящего корпуса 3 его зубчатый венец 9 вращает шестерню 21, входящую в зацепление с ним.
Поворот шестерни 21 через валик 20 и шестерню 22 передается через зубчатый венец 16, лимбу 14, который поворачивается посредством конического зубчатого венца 15, приводит во вращение коническую шестерню 17, подвижно закрепленную на оси 18, которая через зубчатый конический венец 13 вращает лимб 12 в напряжении, противоположном повороту лимба 14.
Угол поворота лимба 14 пропорционален углу поворота следящего корпуса 3 относительно корпуса гирокомпаса 1. Угол поворота лимба 12 равен углу поворота лимба 14, однако направление его поворота противоположно направлению поворота следящего корпуса 3 и лимба 14.
При угловом перемещении лимбов 12 и 14 относительно друг друга во встречных направлениях происходит скрещивание темных и светопроницаемых рисок. При этом возникает эффект "муаровых полос", которые представляют собой световые и темновые концентрические кольца, перемещающиеся в радиальном направлении. В данном устройстве скорость перемещения световых и темновых концентрических колец будет в два раза больше, чем в прототипе. Чередующиеся световые и темновые "муаровые полосы" изменяют освещенность фотодиодов 23 источником света 11. Фотодиоды 23 включены в диагонали моста постоянного тока так, что при разной их освещенности нарушается балансировка моста постоянного тока и с нагрузки при вращении лимбов снимается синусоидальное напряжение. Число синусоидальных импульсов пропорционально углу взаимного разворота лимбов 14 и 12, а частота их следования - скорости их взаимного разворота. В момент прохождения чувствительным элементом 2 положения истинного меридиана частота следования полуволн синусоидального сигнала будет максимальной, потому как максимальна угловая скорость поворота чувствительного элемента 2.
Компаратор напряжения 7 преобразует синусоидальные электрические сигналы, поступающие на его вход с выхода фотоэлектрического датчика 5 в импульсы прямоугольной формы, длительность которых характеризует поворот следящего корпуса 3 на угол, определяющий точность работы устройства. Прямоугольные импульсы на выходе компаратора формируются в течение положительных полуволн синусоидального сигнала. При отрицательной полуволне синусоидального сигнала электрический сигнал на выходе компаратора напряжения 7 отсутствует.
Сравнивающее логическое устройство 8 производит сравнение длительности каждого импульса с выхода компаратора 7 с длительностью следующей за ним паузы и в момент их равенства выдает команду на прекращение отслеживания следящим корпусом 3 чувствительного элемента 2 и арретирование чувствительного элемента 2. При этом следящий корпус 3 будет ориентирован в направлении истинного меридиана.
Таким образом, точность определения положения динамического равновесия чувствительного элемента в предлагаемом устройстве осуществляется путем уменьшения интервалов следования импульсов в направлении, противоположном повороту первого лимба, с равной угловой скоростью. (56) 1. Назаров Б. Н. Гироскопические устройства. М. , МО, 1960, с. 375.
2. Авторское свидетельство СССР N 1231985, кл. G 01 C 19/38, 1984.
| название | год | авторы | номер документа |
|---|---|---|---|
| ГИРОКОМПАС | 1990 |
|
RU2022233C1 |
| ГИРОКОМПАС | 1993 |
|
RU2082094C1 |
| Импульсный датчик угла поворота | 1990 |
|
SU1739184A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ИСТИННОГО МЕРИДИАНА И ВОЛОКОННО-ОПТИЧЕСКИЙ ГИРОКОМПАС, РЕАЛИЗУЮЩИЙ СПОСОБ | 1996 |
|
RU2115889C1 |
| ЛАЗЕРНЫЙ ЦЕЛЕУКАЗАТЕЛЬ-ДАЛЬНОМЕР | 2012 |
|
RU2522784C1 |
| Гирокомпас | 1990 |
|
SU1756761A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2019793C1 |
| ГИРОКОМПАС | 1992 |
|
RU2079106C1 |
| Способ определения меридиана маятниковым гирокомпасом | 1981 |
|
SU1035423A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1990 |
|
RU2023238C1 |

Изобретение относится к точному приборостроению и может использоваться для определения направления истинного меридиана. Цель изобретения - повышение точности определения положения динамического равновесия колебаний чувствительного элемента гирокомпаса. Для достижения поставленной цели в устройстве, содержащем гирокомпас 1 с чувсвительным элементом 2, следящим корпусом, кодовой системой с фотоэлектрическим датчиком импульсов, включающим источник света 11, подвижный первый лимб 12, второй лимб 14, фотодиоды 23, второй лимб 14 выполнен также подвижным и установлен с возможностью вращения относительно первого с равной угловой скоростью в противоположном направлении. 2 ил.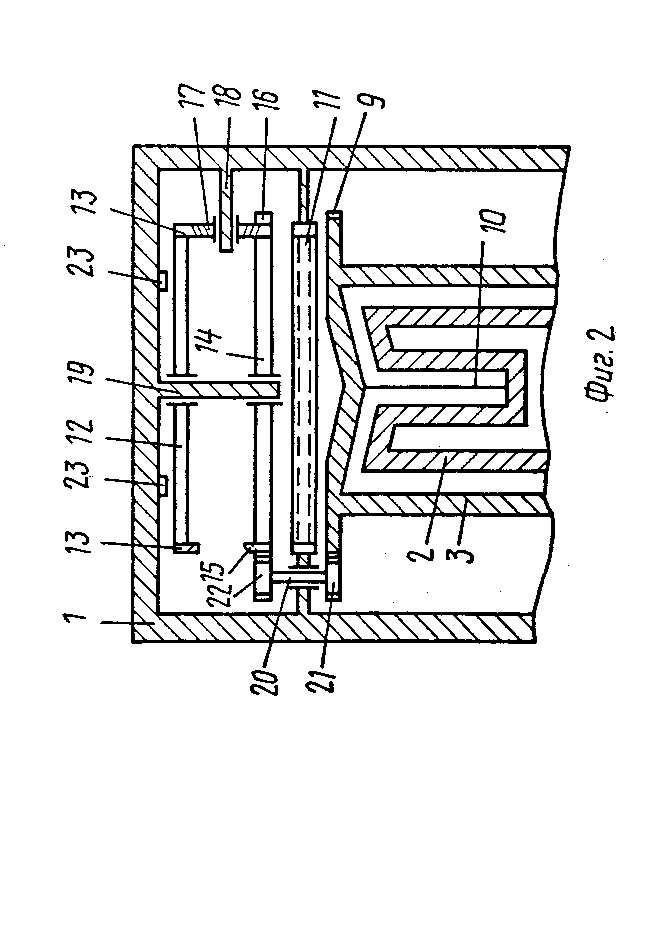
УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ДИНАМИЧЕСКОГО РАВНОВЕСИЯ КОЛЕБАНИЙ ЧУВСТВИТЕЛЬНОГО ЭЛЕМЕНТА ГИРОКОМПАСА, содержащее установленный в копрусе гидрокомпаса фотоэлектрический датчик угла, выполненный в виде жестко связанного с корпусом гидрокомпаса источника света, оптической решетки, образованной двумя соосными лимбами в виде дисков со светонепроницаемыми рисками, один из которых установлен с возможностью вращения относительно корпуса гирокомпаса и связан с его следящим корпусом, и светочувствительных элементов, установленных на корпусе гирокомпаса, а также компаратор напряжения, блок сравнения и генератор импульсов, при этом выход фотоэлектрического датчика угла соединен с входом компаратора напряжения, выход которого соединен с первым входом блока сравнения, второй вход которого соединен с выходом генератора импульсов, а выход является выходом устройства, отличающееся тем, что, с целью повышения точности определения положения динамического равновесия колебаний чувствительного элемента гирокомпаса, второй лимб установлен с возможностью вращения относительно первого с равной угловой скоростью в противоположном направлении и связан со следящим корпусом гирокомпаса.
