Изобретения относится к определению направления истинного меридиана оптическими средствами [1], для навигационных или топографических целей.
Известны способы определения направления истинного меридиана, с использованием волоконно-оптического гироскопа (ВОГ) [2, 3], выходной сигнал которого пропорционален скалярному произведению вектора вращения Земли на вектор чувствительности ВОГ.
При этом в обоих способах определения направления истинного меридиана ВОГ устанавливают таким образом, что его вектор чувствительности лежит в плоскости горизонта. Затем ВОГ последовательно поворачивают на фиксированные углы вокруг оси, перпендикулярной плоскости горизонта, так что его вектор чувствительности остается в плоскости горизонта, причем после каждого i-го поворота на фиксированный угол производят измерение выходного сигнала ВОГ Ui, который пропорционален скалярному произведению вектора вращения Земли  на вектор чувствительности ВОГ
на вектор чувствительности ВОГ  :
:
Ui= kΩcosθcosϕi,
где:
k - масштабный коэффициент ВОГ;
Ω = 15,041°/час - угловая скорость вращения Земли [4];
θ - географическая широта точки Земли, где проводятся измерения;
ϕi - азимут, отсчитываемый в плоскости горизонта от плоскости истинного меридиана до проекции вектора чувствительности ВОГ на плоскость горизонта.
Используя полученные значения U1, U2...Un, определяют направление истинного меридиана, т.е. определяют азимут ϕ .
Особенностью способа, описанного в [2], является то, что производят три измерения выходного сигнала ВОГ, причем первое измерение проводят до поворота ВОГ, второе измерение после поворота ВОГ на угол, равный 90o, относительно первого положения, а третье измерение - после поворота ВОГ на угол, равный 90o, относительно первого положения в сторону, противоположную первому повороту. Используя полученные значения измеренных величин, определяют азимут ϕ (для этого способа это ϕ1 по формулам: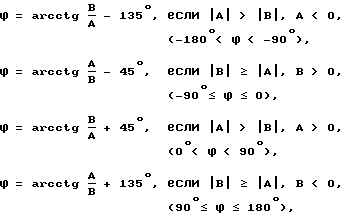
где:
A = U1-U2, B = U1-U3.
В способе, описанном в [3], выбранном в качестве прототипа, осуществляют не три измерения выходного сигнала ВОГ, а 24 измерения, причем первое из которых - до поворота ВОГ, а каждое последующее - после поворота ВОГ в одном направлении с шагом 15o. Полученные 24 значения выходного сигнала ВОГ используют для определения азимута ϕ например, аппроксимируя полученную зависимость выходного сигнала ВОГ от угла поворота ВОГ синусоидальной кривой по методу наименьших квадратов, либо другим аналогичным методом.
Однако, несмотря на то, что во втором способе производят большее число измерений выходного сигнала ВОГ, точность определения направления истинного меридиана не возрастает. Это связано с тем, что большее число измерений приводит к увеличению полного времени определения азимута, а значит - к накоплению возможного дрейфа (медленных изменений) выходного сигнала ВОГ. При этом в обоих способах в течение промежутков времени, затрачиваемых на поворот ВОГ и завершение возникающих при этом переходных процессов, не осуществляется измерение выходного сигнала ВОГ, что также приводит к увеличению полного времени определения азимута.
Задачей изобретения является уменьшение полного времени определения направления истинного меридиана при одновременном повышении точности определения за счет уменьшения влияния дрейфа выходного сигнала ВОГ.
Для решения данной задачи в предлагаемом способе определения направления истинного меридиана ВОГ устанавливают таким образом, что его вектор чувствительности находится в плоскости горизонта, осуществляют поворот ВОГ вокруг оси, перпендикулярной плоскости горизонта так, что его вектор чувствительности остается в плоскости горизонта, производят измерение выходного сигнала ВОГ, и определяют азимут, а согласно изобретению способ отличается тем, что поворот ВОГ осуществляют посредством его вращения с постоянной угловой скоростью (постоянной частотой вращения), а измерение выходного сигнала ВОГ производят посредством его фазового детектирования на частоте вращения, определяя при этом фазу выходного сигнала ВОГ, соответствующую азимуту.
При этом отличительной особенностью предлагаемого способа является то, что фазовое детектирование выходного сигнала ВОГ на частоте вращения ВОГ производят путем квадратурной обработки, с использованием двух управляющих сигналов, частоты которых равны частоте вращения, их фазы, имеющие сдвиг 90o друг относительно друга, контролируют относительно системы координат, в которой производят измерения и жестко связанной с наблюдением, а фазу ϕ выходного сигнала ВОГ, соответствующую азимуту, определяют по формулам: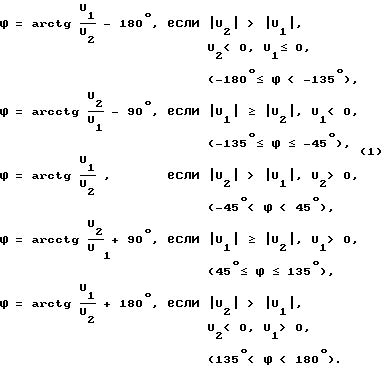 ,
,
где: U1, U2 - первая и вторая квадратурные составляющие после квадратурной обработки выходного сигнала ВОГ.
Осуществляя в предлагаемом способе поворот ВОГ посредством вращения и производя измерение фазы выходного сигнала ВОГ на частоте вращения в отличии от прототипа, где осуществлялось измерение среднего значения выходного сигнала ВОГ в фиксированных позициях ВОГ, соответствующих определенному углу его поворота, позволяет исключить потери времени, в течение которого происходит поворот ВОГ и завершение возникающих при этом переходных процессов, когда измерения выходного сигнала не производятся. Причем поскольку измерение выходного сигнала ВОГ осуществляется селективно на частоте его вращения, это позволяет подавить низкочастотные составляющие спектра выходного сигнала ВОГ, тем самым значительно уменьшить влияние дрейфа (медленных изменений) выходного сигнала ВОГ на точность определения направления истинного меридиана, т.е. увеличить точность.
Осуществление фазового детектирования выходного сигнала ВОГ на частоте вращения ВОГ посредством его квадратурной обработки с последующим определением фазы выходного сигнала ВОГ по формулам (1) позволяет линейно и вне зависимости от значения географической широты точки Земли, где проводятся измерения, определять фазу выходного сигнала ВОГ, соответствующую искомому азимуту.
Известны волоконно-оптические гирокомпасы, позволяющие определить направление истинного меридиана [2, 3], использующие высокочувствительный ВОГ (действующий на основе эффекта Саньяка), позволяющий регистрировать вращение Земли.
ВОГ такого типа [2,3] содержит одномодовое оптическое волокно, сохраняющее поляризацию, порядка одного километра длины (оптимальная длина выбирается исходя из соотношения, с одной стороны, чувствительности, а, с другой стороны, уровня шума и дрейфа ВОГ), намотанное на цилиндрический каркас, образующее чувствительный элемент ВОГ (кольцевой интерферометр). Один из концов этого оптического волокна, длиной порядка нескольких метров, также намотан на пьезокерамический цилиндра, образуя, тем самым, фазовый модулятор, а затем, вместе со вторым концом этого оптического волокна, они подключены к выходам сплавного разветвителя типа 2х2. Один из входов этого разветвителя не используется, а второй подключен через устройство контроля поляризации оптического излучения, распространяющегося в волокне, к выходу второго сплавного разветвителя типа 2х2. У этого разветвителя второй выход не используется, к первому входу подключен источник оптического излучения (суперлюминисцентный диод), а ко второму - фотоприемник. Кроме того, конструкция ВОГ содержит также генератор синусоидального напряжения и синхронный детектор. Генератор синусоидального напряжения подключен к упомянутому пьезокерамическую фазовому модулятору, и к опорному входу синхронного детектора, на выходе которого, являющимся выходом ВОГ, формируется постоянное напряжение, величина которого определяется величиной угловой скорости вращения ВОГ вокруг оси, перпендикулярной плоскости, в которой уложено оптическое волокно чувствительного элемента. При этом не имеет значения, в какой конкретной точке этой плоскости ее пересекает ось вращения. Полярность выходного напряжения определяется направлением вращения ВОГ. Вектором чувствительности ВОГ называется вектор, ориентированный вдоль этой оси, а его модуль равен масштабному коэффициенту ВОГ. Для высокочувствительного ВОГ, используемого в волоконно-оптическом гирокомпасе, типичное значение собственного шума порядка  и дрейф выходного сигнала порядка 0,2o/ч [5] .
и дрейф выходного сигнала порядка 0,2o/ч [5] .
Волоконно-оптический гирокомпас [2] содержит описанный выше высокочувствительный ВОГ, установленный на поворотной платформе так, что его вектор чувствительности, при любом его повороте, вокруг оси, перпендикулярной плоскости горизонта, остается в плоскости горизонта. При этом поворот платформы на фиксированные углы с шагом 90o осуществляется двигателем, управляемым блоком обработки и индикации, к которому также через аналого-цифровой преобразователь подключен выход ВОГ. Азимут определяется блоком обработки и индикации по результатам трех измерений выходного сигнала ВОГ, соответствующих трем позициям ВОГ по формулам, данным выше при описании способа. Однако время, затрачиваемое на поворот платформы с ВОГ, увеличивает полное время определения азимута. Кроме того, в такой конструкции угол поворота платформы должен контролироваться с точностью, большей чем требуемая точность определения азимута. Это предъявляет повышенные требования к точности позиционирования по углу поворотной платформы с ВОГ.
Другой известный волоконно-оптический гирокомпас [3], выбранный за прототип, также содержит высокочувствительный ВОГ, установленный на поворотной платформе аналогично тому, как это выполнено в вышеописанном устройстве. При этом поворот платформы осуществляется двигателем, связанным передачей с платформой, и управляемым блоком обработки и индикации. Блок обработки и индикации также соединен через аналого-цифровой преобразователь с выходом ВОГ. Кроме того, на поворотной платформе установлен датчик угла ее поворота, подключенный к блоку обработки и индикации для обеспечения возможности контроля поворота ВОГ с произвольным шагом, поскольку в данном устройстве может осуществляться измерение сигнала ВОГ в 24 и более позициях.
В данном устройстве, также как и в предыдущем аналоге, определение азимута производится блоком обработки и индикации по результатам измерений выходного сигнала ВОГ. Для этого используется аппроксимация измеренных значений выходного сигнала ВОГ синусоидальной функцией методом наименьших квадратов. При этом также требуется дополнительное время на поворот платформы между измерениями, увеличивающее полное время определения азимута. А угол поворота платформы также должен осуществляться с высокой точностью. Для целей контроля поворота и используется упомянутый датчик угла поворота платформы с ВОГ, что усложняет конструкцию гирокомпаса.
Задачей изобретения является усовершенствование конструкции волоконно-оптического гирокомпаса, позволяющее уменьшить полное время определения азимута при одновременном повышении точности его определения, а также отказаться от использования сложной системы позиционирования по углу платформы с ВОГ.
Для решения данной задачи в волоконно-оптический гирокомпас, содержащий волоконно-оптический гироскоп (ВОГ), установленный с возможностью его поворота вокруг оси, перпендикулярной плоскости горизонта так, что его вектор чувствительности находится в плоскости горизонта, блок аналого-цифрового преобразования, связанный с блоком обработки и индикации, согласно изобретению введены устройство вращения, связанное с ВОГ, блок фазовой обработки сигнала ВОГ, блок формирования сигнала частоты и фазы вращения ВОГ и датчик вращения ВОГ, при этом выход ВОГ соединен со входом блока фазовой обработки сигнала ВОГ, вход управления которого соединен с выходом блока формирования сигнала частоты и фазы вращения ВОГ, вход которого соединен с выходом датчика вращения ВОГ, вход которого связан с устройством вращения, а выход блока фазовой обработки сигнала ВОГ подключен ко входу блока аналого-цифрового преобразования.
В отличие от прототипа такая конструкция позволяет решить поставленную задачу поскольку вместо устройства, используемого в прототипе для поворота платформы на фиксированные углы, и имеющегося в нем датчика угла поворота, представляющих собой сложную систему позиционирования по углу платформы с ВОГ, в предлагаемой конструкции применено устройство вращения с датчиком вращения ВОГ. Такая конструкция позволяет исключить интервалы времени, затрачиваемые в прототипе на повороты ВОГ и завершение возникающих при этом переходных процессов (когда измерение выходного сигнала ВОГ не производится). При этом введенные в предлагаемое устройство блок фазовой обработки сигнала ВОГ и блок формирования сигнала частоты и фазы вращения ВОГ, обеспечивают возможность селективного измерения выходного сигнала ВОГ на частоте вращения ВОГ, т.е. на частоте, выше частот дрейфа выходного сигнала ВОГ, что повышает точность определения азимута.
При этом особенностью предлагаемого устройства является то, что блок фазовой обработки сигнала ВОГ содержит два идентичных фазовых детекторов, входы которых объединены и являются входом блока, к которому подключен выход ВОГ, их входы управления образуют вход управления блока для подключения выхода блока формирования сигнала частоты и фазы вращения ВОГ, а их выходы являются выходом блока для подключения ко входу блока аналого-цифрового преобразования.
Такое выполнение блока фазовой обработки сигнала ВОГ позволяет осуществить в этом блоке фазовое детектирование выходного сигнала ВОГ на частоте вращения ВОГ посредством его квадратурной обработки. Дополнительная обработка выходных сигналов блока фазовой обработки сигнала ВОГ, выполненного таким образом, в блоке обработки и индикации позволяет линейно и вне зависимости от значения географической широты точки Земли, где проводятся измерения, определять фазу выходного сигнала ВОГ, соответствующую искомому азимуту.
Кроме того, предлагается в блоке фазовой обработки сигнала ВОГ в качестве фазовых детекторов использовать два синхронных детектора, входы которых объединены и являются входом блока, к которому подключен выход ВОГ, их входы управления образуют вход управления блока для подключения выхода блока формирования сигнала частоты и фазы вращения ВОГ, а выход каждого подключен ко входу одного из двух фильтров нижних частот, выходы которых являются выходом блока фазовой обработки сигнала ВОГ для подключения ко входу блока аналого-цифрового преобразования.
Предлагаемый волоконно-оптический гирокомпас конструктивно выполнен таким образом, что содержит заключенные в корпус устройство вращения, включающее механическую и электронные части, волоконно-оптический гироскоп (ВОГ) и электронные блоки. Причем ВОГ установлен упомянутым выше образом на вращающейся части устройства вращения.
Электронные блоки фазовой обработки сигнала ВОГ и формирования сигнала частоты и фазы вращения ВОГ, а также датчик вращения ВОГ могут быть установлены либо на вращающейся части устройства вращения, либо жестко закреплены в корпусе. В обоих случаях датчик вращения может быть подключен либо к электронной части устройства вращения, либо к механической его части.
Для осуществления электропитания электронных блоков и ВОГ, установленных на вращающейся части устройства вращения, и передачи сигналов от них и к ним, может быть использован токосъемник, содержащий статор и ротор, жестко закрепленные на корпусе и вращающейся части устройства вращения соответственно. Однако электропитание и передача сигналов могут быть осуществлены и без токосъемника, например, в качестве источника питания может быть использован химический элемент электропитания, установленный на вращающейся части, а передача сигналов может осуществляться по радиоканалу.
Кроме того, в корпусе устройства устанавливаются блок аналого-цифрового преобразования и блок обработки и индикации. Однако в случае целесообразности эти блоки могут быть вынесены за пределы корпуса, например, в случае использования ЭВМ с подключенным к ней блоком аналого-цифрового преобразования.
Частота вращения ВОГ выбирается примерно 2-10 Гц. Такое значение частоты вращения достаточно для того, чтобы селективно по частоте отстроится от низкочастотного дрейфа выходного сигнала ВОГ. Большее значение частоты вращения выбирать нецелесообразно, поскольку при этом возрастают механические вибрации системы, которые регистрируются ВОГ, что ухудшает точность определения направления истинного меридиана.
Следует отметить, что вращение ВОГ таким образом, что его вектор чувствительности остается перпендикулярным оси вращения, делает его нечувствительным к этому вращению, т.е. он его не регистрирует. Однако в реальной конструкции возможно небольшое фиксированное отклонение вектора чувствительности от этого перпендикуляра. В этом случае в выходном сигнале ВОГ появляется аддитивная постоянная составляющая напряжения, которая не оказывает влияния на результат фазовой обработки выходного сигнала ВОГ на частоте вращения ВОГ.
На фиг. 1 приведена структурная схема предлагаемого волоконно-оптического гирокомпаса; на фиг. 2 - пример выполнения механической части устройства вращения с установленными на ней электронной частью устройства вращения, ВОГ, датчиком вращения ВОГ и электронными блоками формирования сигнала частоты и фазы вращения ВОГ, фазовой обработки сигнала ВОГ, аналого-цифрового преобразования, обработки и индикации; на фиг. 3 - пример структурной схемы электронной части устройства вращения; на фиг. 4 - пример структурной схемы электронных блоков формирования сигнала частоты и фазы вращения ВОГ, фазовой обработки сигнала ВОГ, аналого-цифрового преобразования, с подключенными к ним ВОГ, датчиком вращения ВОГ, блоком обработки и индикации, а также токосъемником; на фиг. 5 - временные диаграммы и графики, иллюстрирующие работу предложенного волоконно-оптического гирокомпаса.
В соответствии с фиг. 1 гирокомпас содержит волоконно-оптический гироскоп (ВОГ) 1, установленный на механической части устройства вращения 2, к которому также подключен датчик 3 вращения ВОГ. Выход датчика 3 вращения ВОГ, через блок 4 формирования сигнала частоты и фазы вращения ВОГ, подключен к управляющему входу блока 5 фазовой обработки сигнала ВОГ. Вход блока 5 соединен с выходом ВОГ 1, а его выход, через блок : аналого-цифрового преобразования, подключен к блоку 7 обработки и индикации.
Рассмотрим пример реализации предлагаемого способа определения направления истинного меридиана при работе волоконно-оптического гирокомпаса в соответствии с фиг. 1.
Выходной сигнал высокочувствительного ВОГ пропорционален скалярному произведению вектора вращения Земли  на вектор чувствительности ВОГ
на вектор чувствительности ВОГ  Если ВОГ расположить в какой-либо точке земной поверхности таким образом, что его вектор чувствительности будет находиться в плоскости горизонта, то его выходной сигнал будет равен:
Если ВОГ расположить в какой-либо точке земной поверхности таким образом, что его вектор чувствительности будет находиться в плоскости горизонта, то его выходной сигнал будет равен:
U = kΩcosθcosϕ,
где: k - масштабный коэффициент ВОГ;
Ω = 15,041°/час - угловая скорость вращения Земли [4];
θ - географическая широта точки Земли, где проводятся измерения;
ϕ - азимут, отсчитываемый в плоскости горизонта от плоскости истинного меридиана до проекции вектора чувствительности ВОГ на плоскость горизонта.
При вращении ВОГ 1 с постоянной угловой скоростью вокруг оси, перпендикулярной плоскости горизонта, так, что его вектор чувствительности остается в плоскости горизонта, как это осуществляется в предлагаемой конструкции гирокомпаса устройством вращения 2, выходной сигнал ВОГ:
U = kΩcosθcos(2πf0t+ϕ) (2),
где: f0 - частота вращения ВОГ.
При этом процесс определения азимута ϕ , как это указано ранее при описании способа, сводится к фазовому детектированию выходного сигнала ВОГ 1 на частоте вращения ВОГ в блоке 5 фазовой обработки сигнала ВОГ. Для осуществления этого детектирования необходим опорный сигнал, имеющий частоту, равную частоте вращения ВОГ, и фазу, жестко связанную с определенной ориентацией вектора чувствительности вращающегося ВОГ относительно корпуса гирокомпаса. Такой сигнал формируется блоком 4 формирования сигнала частоты и фазы вращения ВОГ по сигналу, поступающему от датчика 3 вращения ВОГ. Датчик 3 может быть подключен к вращающейся части устройства вращения 2 для непосредственного контроля параметров вращения ВОГ 1. Возможен вариант подключения датчика 3 к электронной части устройства вращения 2, если она сконструирована таким образом, что в ней возможно получение информации о частоте и фазе вращения ВОГ. Сигнал от блока 5 фазовой обработки сигнала ВОГ поступает через блок 6 аналого-цифрового преобразования на блок 7 обработки и индикации, где возможно осуществление дополнительной обработки этого сигнала, например, устранение зависимости этого сигнала от значения широты точки земной поверхности, где проводятся измерения, линеаризация показаний и представление их в форму удобную для индикации с последующей индикацией.
В качестве примера конкретной реализации волоконно-оптического гидрокомпаса могут быть использованы конструкции представленные на фиг. 2, 3 и 4.
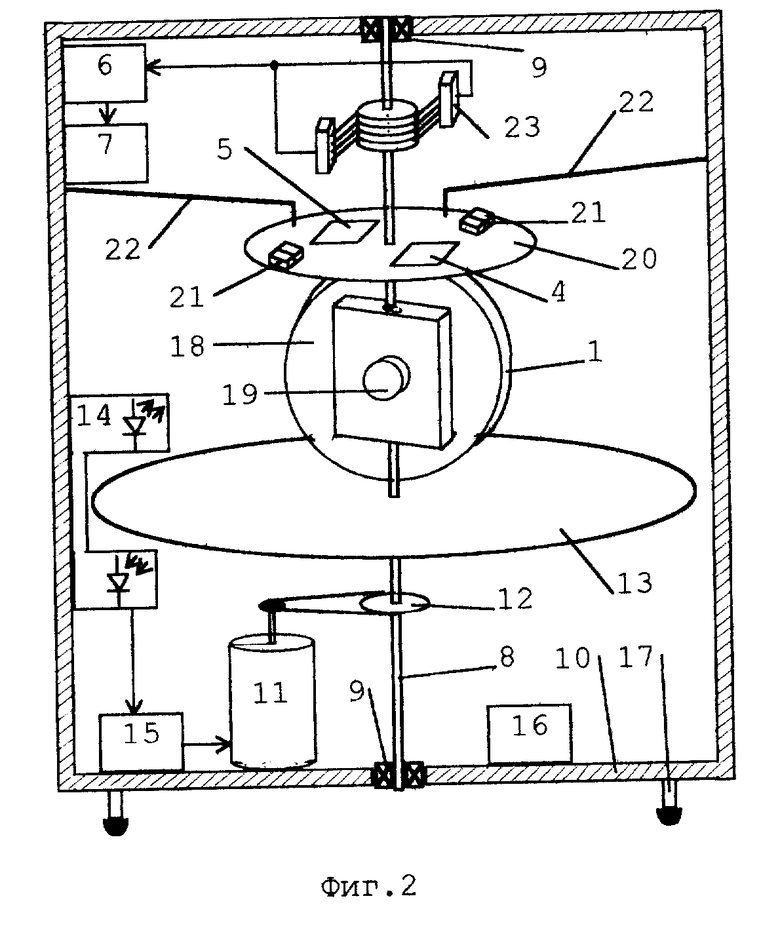
На фиг. 2 представлен схематический чертеж механической части устройства вращения с установленными на ней ВОГ и электронными блоками.
Устройство вращения 2 выполнено по известной схеме [6]. Оно содержит ось 8, закрепленную вертикально элементами фиксации 9 оси (верхний и нижний подшипники) в корпусе 10, двигатель 11 постоянного тока и передачу 12 от него на ось 8. Устройство вращения 2 также содержит жестко закрепленный на оси диск 13 с равномерно отстоящими друг от друга отверстиями по краю (количество отверстий определяется из условий обеспечения стабильности угловой скорости вращения ВОГ и конструктивных возможностей, например, 180 отверстий с шагом 2o), а также излучатель и фотоприемник, выполненные в виде оптронной пары 14, фотоприемник которой подключен к блоку 15 фазовой автоподстройки частоты вращения двигателя. Оптронная пара 14 жестко закреплена на корпусе 10 таким образом, что в ее зазор помещен диск 13 областью, на которую приходятся отверстия. Диск 13 и оптронная пара 14 образуют вспомогательный датчик вращения, обеспечивающий обратную связь для фазовой автоподстройки частоты вращения двигателя 11.
На основании корпуса 10 устройства вращения 2 закреплен датчик 16 наклона, например пузырьковый уровень [7, с. 394], обеспечивающий возможность контроля вертикальности оси 8 при расположении гирокомпаса на какой-либо опоре. Также на основании корпуса 10 снизу закреплены элементы 17 (например, три болта со стопорами, ввинчивающиеся снизу в основание корпуса 10 симметрично относительно основания оси 8 и упирающиеся своими головками, имеющими коническую сглаженную поверхность, в опору), позволяющие осуществлять контролируемый наклон корпуса 10, а значит устанавливать ось 8 вертикально по отношению к плоскости горизонта.
На оси 8 устройства вращения 2 через элемент крепления 18 жестко закреплен ВОГ 1, таким образом, что его вектор чувствительности перпендикулярен вертикальной оси 8. Для устранения разбалансировки масс, возникающей вследствие крепления ВОГ сбоку на оси 8, на противоположной стороне элемента крепления 18 жестко закреплен противовес 19. Кроме того, на оси 8, перпендикулярно ей, жестко закреплена дополнительная платформа 20, на которой установлен две пары излучателей и фотоприемников, выполненных в виде двух оптронных пар 21, блок 4 формирования сигнала частоты и фазы вращения ВОГ и блок 5 фазовой обработки сигнала ВОГ. Оптронные пары 21 установлены ближе к краю дополнительной платформы 20 симметрично друг другу относительно оси 8, таким образом, что их зазоры являются касательными к окружности одного радиуса с центром на оси 8. На корпусе 10 жестко закреплены два реперных флажка 22 таким образом, что при вращении оси 8 с дополнительной платформой 20 зазоры обеих оптронных пар 21 поочередно перекрываются обоими реперными флажками 22. При этом реперные флажки 22 закреплены относительно оси 8 таким образом, что угол между перпендикулярами, опущенными от реперных флажков на ось 8, составляет 90o. Две оптронные пары 21 и два реперных флажка 22 образуют датчик 3 вращения ВОГ. При этом оптронные пары 21 датчика 3 вращения ВОГ электрически связаны с входом блока 4 формирования сигнала частоты и фазы вращения ВОГ, который выходом, в свою очередь, электрически связан со входом управления блока 5 фазовой обработки сигнала ВОГ. Вход блока 5 электрически связан с выходом ВОГ 1, а его выход, через токосъемник 23, электрически связан со входом блока 6 аналого-цифрового преобразования, выход которого электрически связан со входом блока 7 обработки и индикации. Токосъемник 23 может состоять, например, из комплекта, изолированных друг от друга, медных колец (роторная часть, закрепленная на оси 8) и подпружиненных угольных контактов, скользящих по ним (статорная часть, закрепленная на корпусе 10). Электропитание ВОГ 1 датчика 3 вращения ВОГ и электронных блоков 4 и 5, установленных на вращающейся части устройства вращения, осуществляется в данном примере реализации гирокомпаса также через токосъемник 23. Блоки 6 и 7 в данной конструкции гирокомпаса закреплены в корпусе 10.
Следует отметить, что взаимное месторасположение на оси 8 таких элементов, как привод 12 двигателя 11, диск 13, элемент крепления 18 с ВОГ 1, дополнительная платформа 20, с электронными блоками, установленными на ней, а также токосъемник 23, принципиального значения не имеет.
На фиг. 3 приведена структурная схема электронной части устройства вращения 2. Блок 15 фазовой автоподстройки частоты вращения двигателя в предлагаемой конструкции содержит прецизионный генератор [8, с. 154], выход которого, через делитель частоты [9, с. 345], соединен с первым входом фазового компаратора, второй вход которого подключен к оптронной паре 14. В качестве фазового компаратора, второй вход которого подключен к оптронной паре 14. В качестве фазового компаратора может быть использован обычный RS-триггер [8, с. 148]. В таком случае его S-вход и R-вход является первым и вторым входами фазового компаратора соответственно. Выход фазового компаратора подключен к схеме питания двигателя постоянного тока, представляющую собой транзисторный усилитель [9, с. 238], во входной цепи которого включена последовательная LR цепочка, средняя точка которой через конденсатор подключена к земле (фильтр нижней частоты), а нагрузкой усилителя является двигатель 11 постоянного тока, например, типа ДПМ-40.
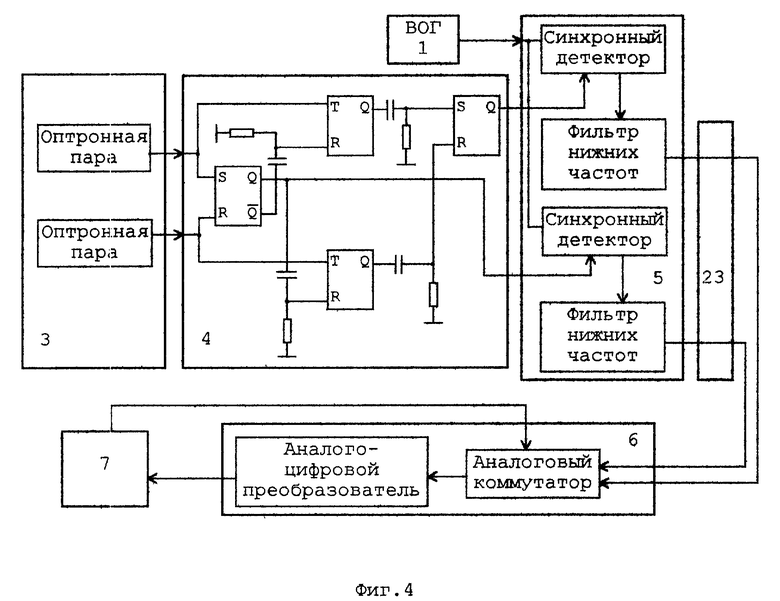
На фиг. 4 приведен пример структурной схемы блока 4 формирования сигнала частоты и фазы вращения ВОГ, блока 5 фазовой обработки сигнала ВОГ и блока 6 аналого-цифрового преобразования, с подключенными к ним ВОГ 1, датчиком 3 вращения ВОГ, блоком 7 обработки и индикации, а также токосъемником 23.
Две опорные пары 21 подключены ко входу блока 4 формирования сигнала частоты и фазы вращения ВОГ, который содержит два RS-триггера [8, с. 148], два T-триггера [8, с. 148] четыре дифференцирующих RC-цепочки, соединенных как показано на фиг. 4. Выход блока 4 соединен со входом управления блока 5 фазовой обработки сигнала ВОГ, который содержит два идентичных фазовых детектора, выполненных в данном примере реализации в виде синхронных детекторов [9, с. 476, 492]. Входы управления этих синхронных детекторов образуют вход управления блока 5, а их входы соединены вместе и образуют вход блока 5, который соединен с выходом ВОГ 1. Выход каждого синхронного детектора подключен ко входу из двух идентичных фильтров нижних частот [9, с. 202], выходы которых образуют выход блока 5. В качестве фазовых детекторов в блоке 5 могут быть использованы и другие устройства, например, устройства выборки-хранения [9, с. 490], и при этом блоки 3 и 4 могут быть реализованы таким же образом. Выход блока 5 через токосъемник 23 подключен ко входу блока 6 аналого-цифрового преобразования. Блок 6 состоит из двухвходового аналогового коммутатора [8, с. 224], вход управления которого подключен к блоку 7 обработки и индикации, а выход ко входу аналого-цифрового преобразователя [8, с. 239]. Выход аналого-цифрового преобразователя образует выход блока 6, который подключен ко входу блока 7 обработки и индикации. Блок 7 может быть организован, например, на основе микропроцессорного комплекта K1816BE51 [10] .
Предлагаемая конструкция волоконно-оптического гирокомпаса (фиг. 2-5) работает следующим образом.
В момент включения питания устройства вращения на фазовый компаратор блока 15 фазовой автоподстройки частоты вращения двигателя (фиг. 3) поступают импульсы только от прецизионного генератора этого блока 15. На выходе фазового компаратора устанавливается состояние логической единицы и таким образом в схеме питания двигателя этого блока 15 формируется максимальное постоянное напряжение, прикладываемое к двигателю 11, тем самым обеспечивая его разгон, а значит, через привод 12, разгон оси 8, с установленными на ней диском 13 и другими элементами. По мере разгона вращающейся части от оптронной пары 14, образующей вместе с диском 13 вспомогательный датчик вращения, начинают приходить импульсы, устанавливающие фазовый компаратор в состояние логического нуля. В момент совпадения частот на входах фазового компаратора происходит захват частоты схемой автоподстройки, напряжение на двигателе 11 падает до номинального уровня, обеспечивающего стабильное вращение, и схема переходит в режим фазовой автоподстройки частоты вращения. При установившемся режиме вращения разность фаз сигналов на входах фазового компаратора содержит информацию о мгновенной угловой скорости вращения, тем самым позволяя осуществлять оперативное управление двигателем 11. Частота прецизионного генератора равна произведению частоты вращения диска 13 на число отверстий, расположенных на нем, и на коэффициент деления делителя частоты. Например, для частоты вращения 10 Гц, 180 отверстий (шаг 2o) и коэффициента деления 32, частота прецизионного генератора составит 57,6 кГц.
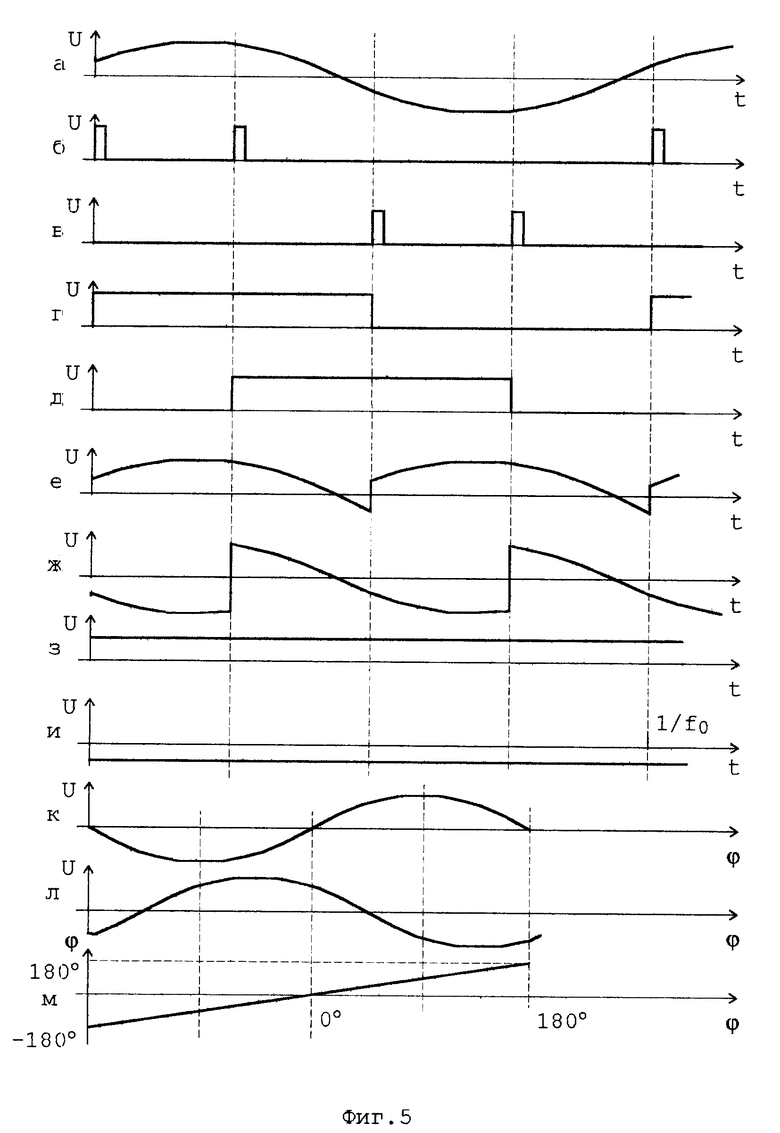
При установившемся режиме вращения устройства вращения 2 (элементы 8-15) с установленным на нем ВОГ 1 выходной сигнал ВОГ 1 (фиг. 5а) примет вид гармонической функции времени (формула 2), частота которой равна частоте вращения ВОГ 1, а фаза, как это указано ранее при описании способа, соответствует азимуту. Электрические сигналы от двух оптронных пар 21 (фиг. 5б и 5в), образующих вместе с двумя реперными флажками 22 датчик 3 вращения ВОГ (фиг. 4), подаются на вход блока 4 формирования сигнала частоты и фазы вращения ВОГ, что позволяет сформировать на выходе блока 4 два квадратурных сигнала (фиг. 5г и 5д), частоты которых равны частоте вращения ВОГ 1, а фазы жестко связаны с определенной ориентацией вектора чувствительности вращающегося ВОГ 1 относительно корпуса 10 устройства (конкретно определяется позицией реперных флажков 22 на корпусе 10). Фазовое детектирование выходного сигнала ВОГ 1 (фиг. 5а), осуществляемое в блоке 5 фазовой обработки сигнала ВОГ, в предлагаемой конструкции гидрокомпаса осуществляется в этом блоке 5 одновременно двумя синхронными детекторами, опорными сигналами которых являются выходные сигналы блока 4 (фиг. 5г и 5д). Такое конструктивное решение позволяет осуществить квадратурную обработку выходного сигнала ВОГ на частоте вращения, т.е. получить после низкочастотной фильтрации выходных сигналов синхронных детекторов (фиг. 5е и 5ж) на выходе блока 5 два постоянных электрических сигнала U1 и U2 (фиг. 5з и 5и), являющихся синус и косинус-функциями от значения фазы выходного сигнала ВОГ (фиг. 5к и 5л). Выходные сигналы U1 и U2 блока 5, пропущенные с вращающейся части устройства вращения через токосъемник 23, поочередно, посредством аналогового коммутирования с последующим аналого-цифровым преобразованием в блоке 6 аналого-цифрового преобразования, вводятся в блок 7 обработки и индикации, где осуществляется их дополнительная обработка, посредством деления одного на другой и взятием от результата деления функции арктангенса (арккотангенса). При этом определяется фаза выходного сигнала ВОГ 1, соответствующая искомому азимуту, после чего осуществляется индикация результата. При такой реализации блока 5 определение азимута осуществляется в блоке 7 по следующим формулам: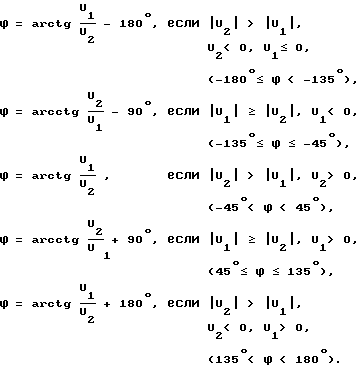
Использование дополнительной обработки сигналов от блока 5 в блоке 7 позволяет за счет их деления одного на другой избавиться от зависимости показаний гирокомпаса от значения географической широты точки Земли, где проводятся измерения, за счет взятия функции арктангенса (арккотангенса) осуществить линеаризацию показаний, а за счет сравнительного анализа двух квадратурных сигналов осуществить однозначное определение азимута в полном диапазоне углов от -180 до +180o. Следует отметить, что показания прибора перед его эксплуатацией следует откалибровать относительно направления истинного меридиана, используя, например, данные астрономической обсерватории. Тем самым будет однозначно определена ось, лежащая в плоскости горизонта и жестко связанная с корпусом гирокомпаса, относительно которой определяется направление истинного меридиана.
Результатом фазового детектирования выходного сигнала ВОГ 1 на частоте его вращения посредством квадратурной обработки в блоке 5 и дальнейшей обработки в блоке 7 будет получена линейная и однозначная выходная функция гирокомпаса (фиг. 5м), т. е. зависимость показаний гирокомпаса от значения азимута.
Список информации, принятой во внимание:
1. Батраков А. С. и др., Лазерные измерительные системы. //М.: Радио и связь. 1981, с. 254-292.
2. Dyott R.B., Allen D.E., A fiber optic gyroscope north finder. //Proc. of 10th Optical fiber sensors conf., Glasgow, Scotland. 11-13 Nov. 1994. - P. 442/
3. Tanaka T. , Igarashi Y. , Auto nouth sensor using a fiber optic gyroscope. //Applied Optics, Vol. 33, No.1, Jan. 1994, p.p. 120-123.
4. Таблицы физических величин. Справочник //Под ред. Кикоина И.К. - М.: Атомиздат, 1976, с. 975.
5. Логозинский В.Н., Соломатин В.А., Применение ВОГ для компасирования. //Труды 2 СПб международной конференции по гироскопической технике и навигации, СПб, 24-25 мая 1995, с. 30-37.
6. Ситников В.А., Стабилизация частоты вращения диска ЭПУ. //Ж. Радио, N 2, 1976, с. 41-42.
7. Справочник конструктора оптико-механических приборов. //Под ред. Кругера М.Я. - Л.: Машиностроение, 1968.
8. Гутников В.С., Интегральная электроника в измерительных устройствах. //Л.: Энергоиздат, 1988.
9. Титце У., Шенк К., Полупроводниковая схемотехника. //М.: Мир, 1982.
10. Сташин В. В. и др., Проектирование цифровых устройств на однокристальных микроконтроллерах. //М.% Энергоатомиздат, 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МНОГОКАНАЛЬНОЙ ПЕРЕДАЧИ СИГНАЛОВ | 1995 |
|
RU2090975C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НАПРАВЛЕНИЯ ИСТИННОГО МЕРИДИАНА НАЗЕМНОГО ТРАНСПОРТА | 2005 |
|
RU2296299C1 |
| Гирокомпас | 2024 |
|
RU2837234C1 |
| УСТРОЙСТВО ДЛЯ СТАТИСТИЧЕСКОГО МОДЕЛИРОВАНИЯ СЛОЖНОЙ СИСТЕМЫ РАБОТ | 1998 |
|
RU2136040C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА И ДИНАМИЧЕСКИЙ ГИРОКОМПАС | 2020 |
|
RU2754964C1 |
| АНАЛИТИЧЕСКИЙ ГИРОКОМПАС ДЛЯ КВАЗИСТАТИЧЕСКИХ ИЗМЕРЕНИЙ | 2009 |
|
RU2408843C1 |
| СПОСОБ КОДИРОВАНИЯ ЦИФРОВЫХ СИГНАЛОВ | 2002 |
|
RU2215369C1 |
| СПОСОБ КОДИРОВАНИЯ ЦИФРОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2168270C2 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОКУРСОКРЕНОУКАЗАНИЯ | 1999 |
|
RU2165074C1 |
| СИСТЕМА САМООРИЕНТИРУЮЩАЯСЯ ГИРОСКОПИЧЕСКАЯ КУРСОКРЕНОУКАЗАНИЯ | 2004 |
|
RU2274832C1 |

Способ позволяет уменьшить полное время определения направления истинного меридиана при одновременном повышении точности. Волоконно-оптический гороскоп /ВОГ/ устанавливают так, что его вектор чувствительности находится в плоскости горизонта. Осуществляют поворот ВОГ вокруг оси, перпендикулярной плоскости горизонта так, что его вектор чувствительности остается в плоскости горизонта. Осуществляют поворот ВОГ посредством вращения с постоянной угловой скоростью. Измеряют выходной сигнал ВОГ посредством его фазового детектирования на частоте вращения, определяя при этом фазу выходного сигнала ВОГ, соответствующую азимуту. Гирокомпас содержит ВОГ, блок аналого-цифрового преобразования, связанный с блоком обработки и индикации. В гирокомпас введены устройство вращения, осуществляющее вращение ВОГ, датчик вращения ВОГ, блок формирования сигнала частоты и фазы вращения ВОГ, блок фазовой обработки сигнала ВОГ. 2 с. и 3 з. п. ф-лы, 5 ил.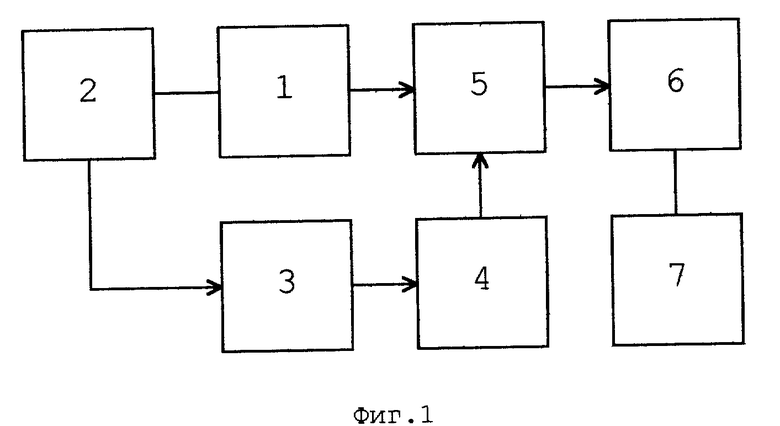
 если
если  V2 < 0, V1 ≤ 0, (-180°≤ ϕ < -135°),
V2 < 0, V1 ≤ 0, (-180°≤ ϕ < -135°), если
если  V1 < 0, (-135°≤ ϕ ≤ -45°),
V1 < 0, (-135°≤ ϕ ≤ -45°), если
если  V2 > 0, (-45°< ϕ < 45°),
V2 > 0, (-45°< ϕ < 45°), если
если  V1 > 0, (45°≤ ϕ ≤ 135°),
V1 > 0, (45°≤ ϕ ≤ 135°), если
если  V2 < 0, V1 > 0, (135°< ϕ < 180°),
V2 < 0, V1 > 0, (135°< ϕ < 180°),
где U1, U2 - первая и вторая квадратурные составляющие после квадратурной обработки выходного сигнала ВОГ.
| SU, авторское свидетельство, 1334888, G 01 C 19/64, 1996 | |||
| Батраков А.С | |||
| и др | |||
| Лазерные измерительные системы.-М.: Радио и связь, 1981, с.254-292 | |||
| Dyott R.B., Allen D.E | |||
| A fiber optic gyroscope north finder | |||
| // Proc | |||
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| G-lasgow, Scotland | |||
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Прибор для охлаждения жидкостей в зимнее время | 1921 |
|
SU1994A1 |
| Tanaka T., Igarashi Y | |||
| Auto north sensor using a fiber optic gyroscope | |||
| // Applied Optics, Vol.33, No.1, Jan | |||
| Прибор для охлаждения жидкостей в зимнее время | 1921 |
|
SU1994A1 |
