1035 23
М - неконтропируемый вер-, тикальный возмущающий момент;
)(2Tfw:o2 (2K)(i
:(2lFo),
«X
F,,(2fbH,0 2fbH- }-J,(2im|, (21H).
X-7 функции Бесселя 1 и П рода первого порядка.;
ХХ - функции Бесселя
I и П рода второго
порядка; 35 3,1И5
оначальное отклонение главной оси гирокомпаса от плоскости меридиана;
оначальная скорость чувствительного элемента при разарретировании;1-п
количество измерений .
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ПЛОСКОСТИ МЕРИДИАНА | 1972 |
|
SU347573A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ АЗИМУТА МАЯТНИКОВОГО ТРЕХСТЕПЕННОГО ГИРОКОМПАСА | 1970 |
|
SU288321A1 |
| Автоматический наземный гирокомпас | 1979 |
|
SU808847A1 |
| ИЗМЕРИТЕЛЬ НАПРАВЛЕНИЯ ГЕОГРАФИЧЕСКОГО МЕРИДИАНА | 1998 |
|
RU2150087C1 |
| МАЯТНИКОВЫЙ ГИРОКОМПАС | 1988 |
|
SU1575661A1 |
| СПОСОБ КОМПЕНСАЦИИ ИНЕРЦИОННОЙ ПОГРЕШНОСТИ ГИРОКОМПАСА ПРИ МАНЕВРИРОВАНИИ СУДНА И ГИРОКОМПАС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 1997 |
|
RU2128822C1 |
| Способ определения азимута трёхосного гиростабилизатора по углу поворота гироскопа | 2020 |
|
RU2729515C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ ТРЕХОСНОГО ГИРОСТАБИЛИЗАТОРА | 1996 |
|
RU2131113C1 |
| Наземный гирокомпас | 1976 |
|
SU550862A1 |
| Трехстепенный маятниковый гирокомпас | 1991 |
|
SU1809306A1 |
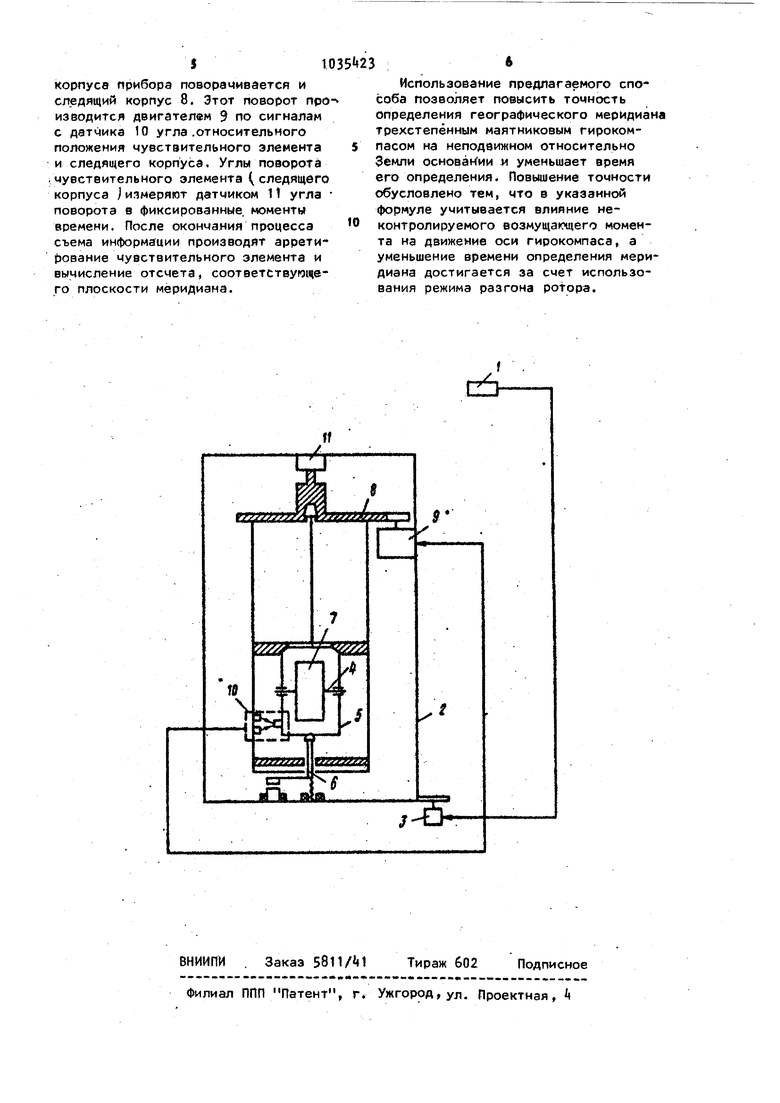
Изобретение относится к приборостроению, в частности к способам определения географического меридиана с помощью трехстепенного маятникового гирокомпаса, Известен способ определения мерид aHaJ согласно которому с целью сокра щения времени определения, поддерживают постоянство скорости прецессии чувствительного элемента в азимуте посредством изменения кинематическо го момента и определяют плоскость мери диана по положению чувствительного элемента при экстремуме кинетического момента С 1 Недостаток способа - большая длительность процесса определения мерит диана, что связано с принципиальной необходимостью прохождения осью кинетического момента плоскости меридиана в процессе определения по следнего. Кроме того, при наличии Неконтролируемого вертикального возмущающего, момента положение чувстви тельного элемента при экстремуме ки нетического момента смещается от ме ридиана. Это смещением обусловливает ошибку определения меридиана. Известен способ определения меридиана маятниковым гирокомпасом, заключающийся в первоначальной выстав. ке главной оси чувствительного элемента гирокомпаса в плоскость мериди ана, разгоне ротора чувствительного элемента гирокомпаса до начальной угловой скорости, разарретирования чувствительного элемента гирокомпаса, измерении углов поворота чувствительного элемента гирокомпаса относительно корпуса гирокомпаса в фиксированные моменты времени и точном определении направления меридиана с учетом полученных данных 2 . Недостаток известного способа заключается в том, что направление меридиана определяется как положение равновесия колебаний чувствительного элемента. Наличие неконтролируемого возмущающего момента М вокруг вертикальной оси чувств.ительного элемента вызывает смещение положения равновесия колебаний, которое и является ошибкой определения меридиана. При этом время измерения складывается из времени разгона ротора до номинальной скорости вращения и времени, не обходимого для определения положения равновесия азимутальных колебаний чувствительного элемента после разгона. Цель изобретения повышение точности и уменьшение времени определения меридиана, Указанная цель достигается тем, что согласно способу определения мерииана маятниковым гирокомпасом, заклюающемуся в первоначальной выставке главной оси чувствительного элемента гирокомпаса в плоскость меридиана, разгоне ротора чувствительного элеменNQ - отсчет, соответствующий положению плоскости меридиан N. - текущие значения отсчетов, определя ющие углы поворота чувствительного эл мента относительно корпуса прибора азимуте; горизонтальная и вертикальная составляющие угловой скорости вращения Земли; «V-V4 текущее значение кинетического момента ротора; начальное значение кинетического момента ротора; Ъ cohst скорость изменени кинетического момента ротора; t. Atn ut текущее время; интервал между мо ментами съема информации;mgl-U -h: маятникозость при бора ; М - неконтролируемый - вертикальный возмущающий момент; п - количество измерении. При наличии избыточной информации (п ) точность определения меридиана существенно повышается путем применения при обработке результатов измерения одного из методов математической Фильтрации, например метода наименьших квадратов, с последующим решением систем отношений для определения NQ на вычислительной машине. На чертеже изображена схема реализации предложенного способа. По сигналу маятникового компаса 1, являющегося грубым определителем плоскости меридиана, корпус 2 гирокрмпаса устанавливают двигателем 3 в азимуте таким образом, чтобы главная ось 4 гирокомпаса находилась в плоскости меридиана. В это время чувствительньй элемент 5 гирокомпаса зафиксирован арретиром 6 относительно корпуса прибора. В указанном заарретированном положении ротор 7 разгоняют до начальной угловой скорости. После этого производят разар-.ретирование чувствительного элемен та и начинают увеличивать скорость вращения ротора по линейному закону, одновременно чувствительный элемент начинает поворачиваться в горизонтальной плоскости. Вместе с чувствительным элементом относительно
корпуса прибора поворачивается и следящий корпус 8. Этот поворот производится двигателем 9 по сигналам с датчика 10 угла .относительного положения чувствительного элемента и следящего корпуса. Углы поворота .чувствительного элемента ( следящего корпуса j измеряют датчиком 1f угла поворота в фиксированные, моменты времени. После окончания процесса съема информации производят аррети0ование чувствительного элемента и вычисление отсчета, cooтвeтcтвy 3lчe го плоскости меридиана.
Использование предлагаемого способа позволяет повысить точность определения географического меридиан трехстепенным маятниковым гирокомпасом на неподвижном относительно Земли основании w уменьшает время его определения. Повышение точности обусловлено тем, что в указанной формуле учитывается влияние неконтролируемого возмущающего момента на движение оси гирокомпаса, а уменьшение времени определения меридиана достигается за счет использования режима разгона ротора.
п
zTr
Y/7
f
г0 { 4 У
ЛйУ.
iriv-o-
QZZ
VftxauiUi
ifoxaa
X
rfb
ix
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР И , кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Воронков Н.Н | |||
| ,, Кутырев В.В., Ашимов Н.М | |||
| Гироскопическое ориентирование | |||
| М., Недра, 1980, С | |||
| (прототип). | |||
