Изобретение относится к горному машиностроению и может быть использовано в шагающих экскаваторах.
Известно рабочее оборудование экскаватора-драглайна, включающее стрелу, лебедки, тяговый канат с цепями, шарнирно-соединенными с ковшом узлами крепления, подъемные канаты с цепями, причем цепи одного подъемного каната шарнирно соединены с ковшом узлами крепления, а цепи второго каната шарнирно соединены с узлами крепления тяговых цепей к ковшу [1] .
Недостатком известной конструкции рабочего оборудования является возрастание длительности разгрузки ковша ввиду большого момента инерции лебедки.
Наиболее близким по своей технической сущности к предлагаемому изобретению является рабочее оборудование экскаватора-драглайна, включающее ковш с аркой, стрелу, подъемную, тяговую и дополнительную лебедки с подъемным, тяговым и дополнительным канатами, направляющие блоки, дополнительный направляющий, разгрузочный и дополнительный разгрузочный блоки, причем дополнительный канат запасован посредством дополнительного направляющего, разгрузочного и дополнительного разгрузочного блоков, а его свободный конец соединен с обоймой разгрузочного блока [2] .
Недостатками данной конструкции рабочего оборудования экскаватора-драглайна являются сложность управления ковшом, обусловленная необходимостью как синхронной (при транспортировании ковша), так и независимой (при разгрузке) работы подъемной и дополнительной лебедок, что в конечном счете приводит к снижению производительности экскаватора.
Целью изобретения является повышение производительности экскаватора за счет упрощения управления ковшом.
Поставленная цель достигается тем, что в известном рабочем оборудовании шагающего экскаватора, включающем ковш с аркой, стрелу, подъемную, тяговую и дополнительную лебедки с подъемным, тяговым и дополнительным канатами, направляющие блоки, дополнительный направ- ляющий, разгрузочный и дополнительный разгрузочный блоки, причем дополнительный канат запасован посредством дополнительного направляющего, разгрузочного и дополнительного разгрузочного блоков, установлено (на тех же осях) несколько разгрузочных и дополнительных разгрузочных блоков, число которых определяется исходя из кратности полиспаста, образуемого данными блоками и дополнительным канатом, равной
K = aSmax Sδ, где a - запас устойчивости ковша;
Smax - максимальное значение усилия на арке ковша, направленного по линии, соединяющей центры разгрузочных и дополнительных разгрузочных блоков;
Sδ - усилие в сбегающей (с бандажа дополнительной лебедки) ветви дополнительного каната.
Анализ патентной и научно-технической информации, которой располагают заявитель и авторы, показал, что неизвестны технические решения, содержащие признаки, сходные с отличительными признаками заявленного предложения. Это позволяет сделать вывод о соответствии предлагаемого технического решения критерию "существенные отличия".
Такое выполнение рабочего оборудования шагающего экскаватора позволяет обеспечить статическую устойчивость ковша в любом месте рабочей зоны за счет полиспаста, образованного дополнительным канатом с разгрузочными и дополнительными разгрузочными блоками, кратность которого равна K = aSmax/Sδ. При этом усилие на полиспасте Sп = k ˙Sδ превышает усилие Smax на величину запаса устойчивости ковша a. Кроме того, обеспечивается синхронная работа подъемной и дополнительной лебедок за счет автоматического выбора слабины дополнительного каната при работе двигателя дополнительной лебедки в режиме противовключения.
Также обеспечивается независимая работа лебедок (при разгрузке ковша) при динамичном вытравливании дополнительного каната ввиду малой инерционности дополнительной лебедки. В конечном счете за счет упрощения управления ковшом достигается повышение производительности экскаватора.
На чертеже приведен общий вид рабочего оборудования шагающего экскаватора.
Рабочее оборудование шагающего экскаватора включает ковш 1 с аркой 2, стрелу 3, подъемную 4, тяговую 5 и дополнительную 6 лебедки с подъемным 7, тяговым 8 и дополнительным 9 канатами, направляющие блоки 10, дополнительный направляющий 11, разгрузочные 12 и дополнительные разгрузочные 13 блоки, причем дополнительный канат 9 запасован посредством дополнительного направляющего блока 11 и образует с разгрузочными 12 и дополнительными разгрузочными 13 блоками полиспаст, кратность которого равна K = = aSmax/Sδ.
Число разгрузочных 12 и дополнительных 13 блоков определяется исходя из кратности полиспаста K. Так, если K = 4, то число блоков 12 составит 2 и блоков 13 то же 2.
Рабочее оборудование шагающего экскаватора работает следующим образом. Цикл работы экскаватора начинается с операции черпания горной массы, осуществляемой при подтягивании ковша 1 к экскаватору посредством тягового каната 8. После заполнения ковша 1 он транспортируется к месту разгрузки при одновременном действии подъемной 4, тяговой 5 и дополнительной 6 лебедок. При этом обеспечивается синхронная работа подъемной 4 и дополнительной 6 лебедок ввиду автоматического выбора слабины дополнительного каната 9 при работе двигателя дополнительной лебедки 6 в режиме противовключения, а также гарантированное удержание ковша 1 при действии наибольших нагрузок (в транспортном положении) полиспастом, кратность которого равна K = aSmax/Sδ. При подводе ковша 1 к месту разгрузки производится его разгрузка при вытравливании дополнительного каната 9. Затем ковш 1 опускается в забой и следует новый цикл.
Предлагаемая конструкция рабочего оборудования позволит за счет упрощения управления ковшом повысить производительность шагающего экскаватора на 5-10% . (56) Авторское свидетельство СССР N 972008, кл. E 02 F 3/48, 1982.
Авторское свидетельство СССР N 1694789, кл. E 0 F 3/48, 1991.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАБОЧЕЕ ОБОРУДОВАНИЕ ЭКСКАВАТОРА-ДРАГЛАЙНА | 1991 |
|
RU2007517C1 |
| Рабочее оборудование экскавато-PA-дРАглАйНА | 1979 |
|
SU810900A1 |
| Способ диагностики неисправностей ФАР | 1990 |
|
SU1800401A1 |
| Рабочее оборудование экскаватора - драглайна | 1990 |
|
SU1788998A3 |
| Одноковшовый карьерный экскаватор | 1989 |
|
SU1745821A1 |
| Рабочее оборудование экскаватора-драглайна | 1989 |
|
SU1694789A1 |
| Рабочее оборудование экскаватора-драглайна | 1985 |
|
SU1265255A1 |
| Рабочее оборудование экскаватора-драглайна | 1985 |
|
SU1283303A1 |
| Рабочее оборудование одноковшового экскаватора | 1975 |
|
SU608885A2 |
| Подвеска ковша экскаватора-драглайна | 1981 |
|
SU945294A1 |
Использование: рабочее оборудование шагающего экскаватора относится к горному машиностроению и может быть использовано в шагающих экскаваторах. Сущность изобретения: с целью повышения производительности экскаватора за счет упрощения управления ковшом в рабочем оборудовании шагающего экскаватора транспортирование груженого ковша производится при одновременном действии подъемной 4, тяговой 5 и дополнительной 6 лебедок. При этом обеспечивается синхронная работа лебедок ввиду автоматического выбора слабины дополнительного каната 9 при работе двигателя дополнительной лебедки 6 в режиме противовключения, а также гарантированное удержание ковша 1 в транспортном положении полиспастом, кратность которого равна K=a·Smax/Sδ, где a - запас устойчивости ковша; Smax - максимальное значение усилия на арке ковша, необходимого для удержания груженого ковша в транспортном положении и направленного по линии, соединяющей центры разгрузочных и дополнительных разгрузочных блоков; Sδ - усилие в сбегающей (с барабана дополнительной лебедки) ветви дополнительного каната. При подводе ковша к месту разгрузки производится его разгрузка при вытравливании тягового 8 и дополнительного 9 канатов. Затем ковш опускается в забой и следует новый цикл. 1 ил.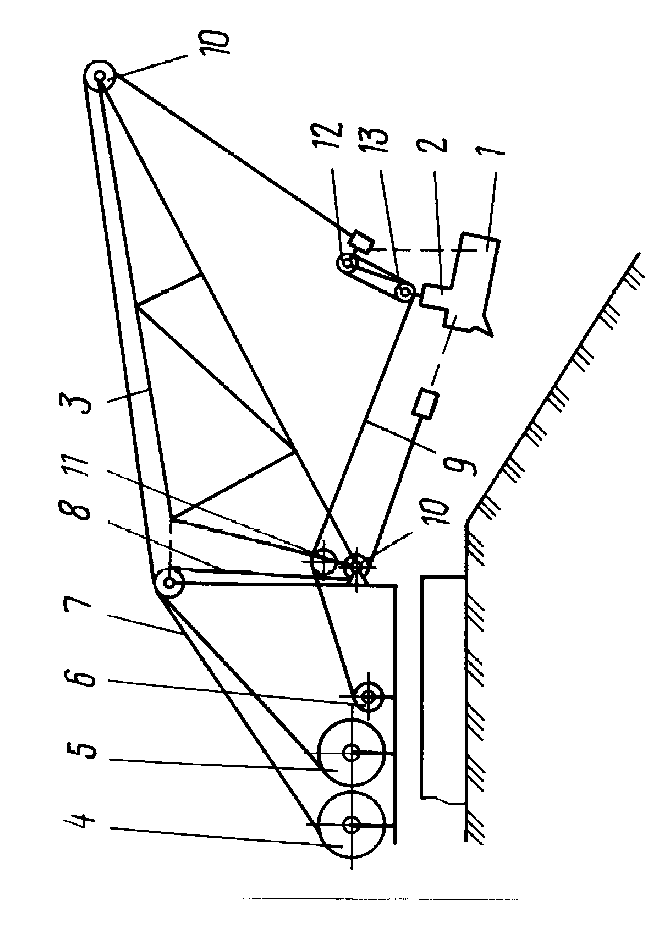
РАБОЧЕЕ ОБОРУДОВАНИЕ ШАГАЮЩЕГО ЭКСКАВАТОРА, включающее ковш с аркой, стрелу, подъемную, тяговую и дополнительную лебедки с подъемным и тяговым канатами, направляющие блоки, дополнительный направляющий, разгрузочный и дополнительный разгрузочный блоки и дополнительный канат, запасованный через дополнительный направляющий, разгрузочный и дополнительный разгрузочный блоки, отличающееся тем, что, с целью повышения производительности экскаватора за счет упрощения управления ковшом рабочего оборудования, оно снабжено установленными на тех же осях несколькими разгрузочными и дополнительными разгрузочными блоками, число которых определяется исходя из кратности полиспаста, образуемого данными блоками и дополнительным канатом, равной
K = a · Smax/Sб,
где a - запас устойчивости ковша;
Smax - максимальное значение усилия на арке ковша, направленного по линии, соединяющей центры разгрузочных и дополнительных разгрузочных блоков;
Sб - усилие в сбегающей с барабана дополнительной лебедки ветви дополнительного каната.
