Изобретение относится к технике звукоизоляции и может быть использовано для гашения пульсаций давления жидкости или газа, распространяющихся по трубопроводам.
Известен гаситель пульсаций давления в трубопроводе, содержащий датчик давления рабочей среды, связанный посредством блока управления с электромеханическим возбудителем колебаний давления (см. авт. св. СССР N 1381305, кл. F 16 L 55/04, 1986).
Наиболее близким по технологической сущности и достигаемому результату к предложенному устройству является активный гаситель пульсаций давления, содержащий датчик давления рабочей среды, связанный с электромеханическим формирователем принудительных колебаний рабочей среды на участке демпфирования магистрального трубопровода, принят за прототип.
Целью изобретения является повышение эффективности гашения колебаний и снижение вибраций трубопровода.
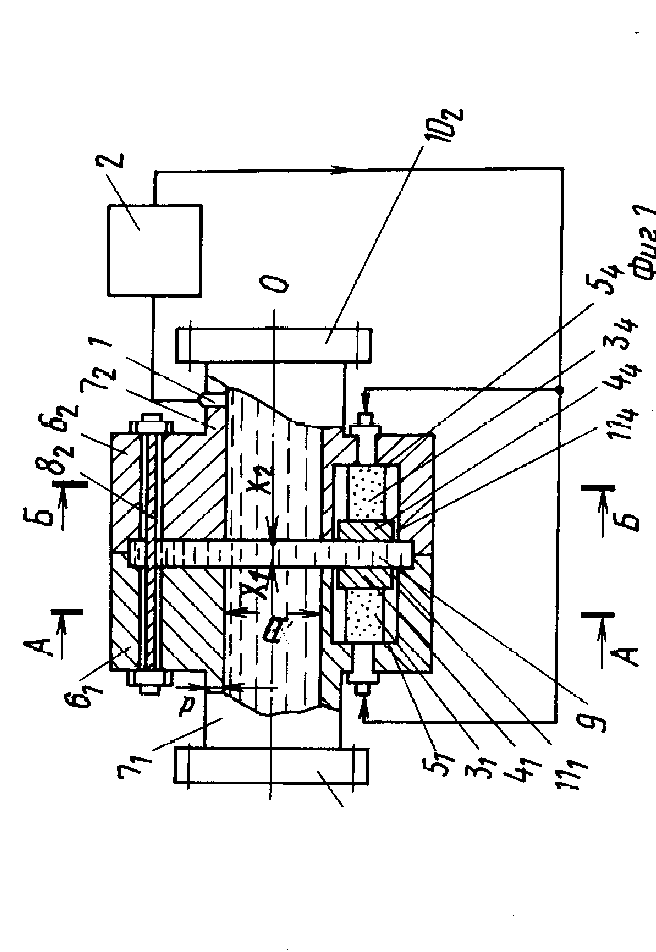
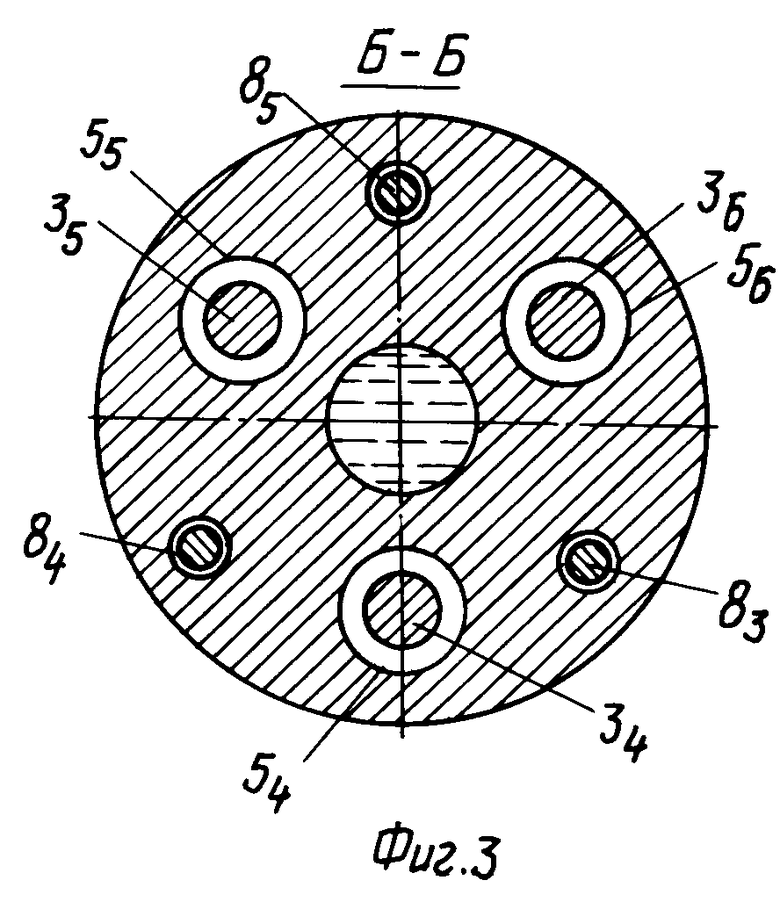
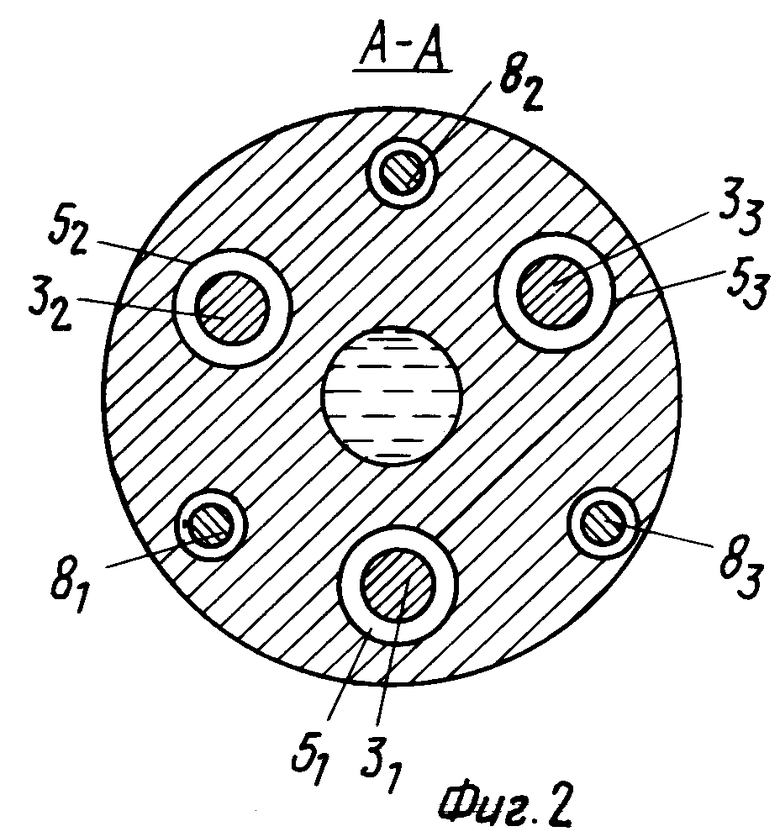
На фиг. 1 изображено предлагаемое устройство, разрез по продольной оси; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1.
Активный гаситель пульсаций давления состоит из следующих основных элементов: датчика давления рабочей среды 1; блока управления 2; группы генераторов перемещения 3 (с индексами 1-3; 4-6); жестких поршней 4 (с индексами 1-3; 4-6); суммарные векторы перемещения групп генераторов Х (с индексами 1, 2); гнезд 5 (с индексами 1-3; 4-6); утолщенные фланцы 6 (с индексами 1, 2); патрубок 7 (с индексами 1, 2); шпильки 8 (с индексами 3, 1); осесимметричной полости 9; наружных фланцев 10 (с индексами 1, 2); упругих уплотнений 11 (с индексами 1-3; 4-6).
Активный гаситель пульсаций давления в трубопроводе включает датчик давления рабочей среды 1, электрический связанный через блок управления 2 с электромеханическим формирователем принудительных колебаний рабочей среды на участке демпфирования магистрального трубопровода, выполненным в виде двух групп генераторов перемещения, например, пьезоэлектрического или магнитострикционного типа.
Они могут взаимодействовать с рабочей средой непосредственно или через жесткие поршни 4, а суммарные векторы Х перемещений групп генераторов расположены на одной прямой и направлены противоположно. В данном конструктивном варианте устройства генераторы расположены параллельно и симметрично относительно оси устройства О-О в гнездах 5 на концах патрубков 7.
Фланцы герметически соединяются между собой шпильками 8, образуя осесимметричную полость 9, соединенную с полостью трубопровода и заполняемую рабочей средой. С внешней стороны патрубки 7 имеют наружные фланцы 10, предназначенные для включения активного гасителя пульсаций давления в трубопровод.
Между каждым их жестких поршней 4 и стенкой соответствующего гнезда имеются зазоры, которые могут быть заполнены упругими уплотнениями 11. Для надежности при малых толщинах стенок патрубков целесообразно снабдить их снаружи поперечными ребрами жесткости.
Возможны также другие варианты конструкции с иным числом генераторов перемещения в каждой группе. Генераторы перемещения 3 могут быть расположены на разном расстоянии от оси О-О и под углом к ней, в частности, перпендикулярно, взаимодействуя с рабочей средой в полости трубопровода. В таком случае осесимметричная полость 9 отсутствует.
При герметичности генераторов перемещения 3 нет необходимости в упругих уплотнениях. Генераторы перемещения могут быть выполнены также на основе преобразователей электродинамического или электромагнитного типа при условии повышения жесткости их рабочих органов или введения дополнительных корректирующих цепей в блок управления 2.
Активный гаситель пульсаций давления работает следующим образом. При наличии в рабочей среде трубопровода пульсаций давления, обусловленных, например, работой насоса, датчик давления рабочей среды 1 генерирует электрический сигнал, который усиливается и фильтруется блоком управления 2.
С выхода блока управления 2 управляющее напряжение подается параллельно на все генераторы перемещения. Характерной особенностью генераторов перемещения являются высокая собственная жесткость, превышающая на порядок и более динамическую жесткость рабочей среды, и, как следствие, независимость выходной величины (виброперемещения жестких поршней) от реакций рабочей среды, в широком диапазоне частот и статических давлений.
Наилучшим образом это реализуется в возбудителях пьезоэлектрического и магнитострикционного типов. Улучшению частотных характеристик устройств способствует также неискаженная передача колебаний рабочей среде через недеформируемые жесткие поршни, вследствие чего пульсации объема осесимметричной полости 10 строго пропорциональны виброперемещениям и площади поршней.
В результате совместно синфазной работы генераторов перемещения общая пульсация объема осесимметричной полости 10 равна сумме пульсаций объема, задаваемых отдельными генераторами перемещения и пропорциональна мгновенному значению сигнала датчика давления рабочей среды 1, а также коэффициенту передачи блока управления 2. Величина и знак коэффициента передачи выбираются так, что исходные пульсации давления, обусловленные работой источника колебаний (например, насоса) и управляемые пульсации давления, определяемые пульсацией объема осесимметричной полости 10, частично или полностью компенсировались. В результате уменьшается передача звуковой энергии в ту часть трубопровода, которая находится за активным гасителем, т. е. имеет место активное гашение пульсаций давления, или активная звукоизоляция.
Благодаря использованию генераторов перемещения и жесткости поршней значительно упрощается выбор частотной характеристики блока управления 2, необходимый для эффективного гашения пульсаций давления в заданном частотном диапазоне. Она определяется в этих условиях только параметрами рабочей среды и трубопровода. Так, если участок трубопровода между источниками колебаний (например, насосом и активным гасителем) имеет гибкую стенку и служит пассивным звукоизолятором, амплитудно-частотная характеристика блока управления 2 в рабочей полосе частот может быть равномерно, а фазовый сдвиг 0 или 180 градусов.
(56) Авторское свидетельство СССР N 987268, кл. F 16 L 55/04, 1983.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЕГУЛИРУЕМЫЙ МАГНИТОРЕОЛОГИЧЕСКИЙ АМОРТИЗАТОР | 1993 |
|
RU2068513C1 |
| СПОСОБ ИССЛЕДОВАНИЯ ФУНКЦИОНАЛЬНОГО СОСТОЯНИЯ ОПОРНО-ДВИГАТЕЛЬНОГО АППАРАТА ЧЕЛОВЕКА | 1991 |
|
RU2009493C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАКОНЕЧНИКА ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ РОБОТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1990 |
|
RU2009881C1 |
| СПОСОБ ЗАЩИТЫ ОБЪЕКТА НА МАЯТНИКОВОЙ ПОДВЕСКЕ ОТ РЕЗОНАНСНЫХ КОЛЕБАНИЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2003 |
|
RU2245470C2 |
| СПОСОБ ЗАПРЕССОВКИ ДЕТАЛЕЙ НА ЭЛЕКТРОМЕХАНИЧЕСКОМ ПРЕССЕ | 1994 |
|
RU2102215C1 |
| УСТРОЙСТВО СТЫКОВКИ КОСМИЧЕСКОГО ОБЪЕКТА | 2000 |
|
RU2195417C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАКОНЕЧНИКА ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ РОБОТА | 1990 |
|
RU2009882C1 |
| ВИБРОИЗОЛИРУЮЩАЯ ОПОРА | 2003 |
|
RU2263834C2 |
| Амортизатор с автоматическим управлением | 1984 |
|
SU1229481A2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ЗУБЧАТЫХ РЕДУКТОРОВ | 1993 |
|
RU2035714C1 |
Использование: для гашения пульсаций давления жидкости или газа, распространяющихся по трубопроводам. Сущность: при наличии в рабочей среде трубопровода пульсаций давления, обусловленных, например, работой насоса, датчик 1 давления рабочей среды генерирует электрический сигнал, который усиливается и фильтруется блоком 2 управления. С выхода блока 2 управления управляющее напряжение подается параллельно на все генераторы 31-36 перемещения. Характерной особенностью генераторов перемещения является высокая собственная жесткость и, как следствие, независимость выходной величины от реакций рабочей среды, в широком диапазоне частот и статических давлений. Улучшению частотных характеристик устройства способствует также неискаженная передача колебаний рабочей среде через недеформируемые жесткие поршни 41-46 , вследствие чего пульсации объема осесимметричной полости 10 строго пропорциональны виброперемещениям и площади поршня 4. 3 з. п. ф-лы, 3 ил.