Изобретение относится к области подвесных систем высокоточной угловой стабилизации и может быть использовано для защиты маятниковых подвесок от резонансных колебаний в устройствах угловой стабилизации подвешенных аэростатных платформ с вращающимися антеннами радиолокационных станций, а также в подвесках подъемно-транспортных устройств, предназначенных для работы с объектами (грузами) повышенной опасности и при проведении высокоточных монтажных работ в труднодоступных местах, например, с помощью вертолетов или высотных кранов.
Известна маятниковая подвеска устройства угловой стабилизации подвешенного объекта на транспортном средстве с установленными враспор пневмоупругими элементами в виде резинокордных оболочек, образующих пневмопривод двойного действия, обеспечивающий угловую стабилизацию платформы с вращающейся антенной радиолокационной станции и ее защиту от высокочастотной вибрации, возникающей под действием внешних возмущающих факторов в процессе эксплуатации (Патент Российской Федерации №2181683, МПК 7 B 64 D 47/00, 2000 г. на изобретение “Устройство угловой стабилизации подвешенного объекта на транспортном средстве” - прототип. Опубл. в Бюл. №12, 27.04.2002).
Указанное техническое решение имеет следующий недостаток: из-за фиксированного давления сжатого газа в рабочих камерах пневмопривода двойного действия их жесткость и, соответственно, частота собственных колебаний подвески также имеют фиксированное значение. В результате возникает опасность совпадения частоты возбуждений от действующих на подвеску в процессе эксплуатации внешних и внутренних возмущающих факторов с ее собственной частотой, что неизбежно приведет к возникновению резонансных колебаний, способных вывести систему из устойчивого состояния и снизить точность угловой стабилизации подвешенной платформы с вращающейся антенной радиолокационной станции в процессе эксплуатации, а также к возможным механическим повреждениям несущей конструкции и выходу системы из строя.
Известен способ изменения собственной частоты пневмомеханического возбудителя 1 пневмомеханической виброзащитной системы с пневматическим возбудителем (силовым цилиндром) двойного действия, способной одновременно обеспечивать позиционирование изолируемого объекта 8 относительно жесткого неподвижного корпуса пневмомеханического возбудителя 1 (Фролов К.В., Фурман Ф.А. Прикладная теория виброзащитных систем. - М.: Машиностроение, 1980, с.148-149, рис. 69). Способ реализуется за счет открытия и закрытия клапанов дросселей 6, связывающих полости пневмомеханического возбудителя 1 с дополнительными емкостями 7, что позволяет дискретно изменять собственную частоту системы и обеспечивать ее защиту от внешних воздействий на резонансной частоте.
Указанный способ имеет следующие недостатки:
1) наличие дополнительных камер 7 приводит к увеличению габаритно-массовых характеристик системы, что в ряде случаев неприемлемо;
2) подключение с помощью дросселей 6 дополнительных камер 7 (или их отключение) приводит к резким изменениям жесткости системы, что способствует появлению неустойчивости в ее работе; увеличение количества дополнительных камер 7 для обеспечения плавного изменения жесткости системы неизбежно приведет к возрастанию ее габаритно-массовых характеристик и снижению надежности работы, что в ряде случаев неприемлемо;
3) для надежной защиты системы от резонансных колебаний необходимо, чтобы частота собственных колебаний системы отличалась от частоты возбуждения на 1-2 Гц; в то же время известно, что квадрат частоты собственных колебаний пневмовозбудителя 1, определяющей частоту собственных колебаний системы, прямо пропорционален его жесткости, которая в свою очередь обратно пропорциональна объему его рабочих камер (Синев А.В., Соловьев B.C. Повышение внутреннего демпфирования пневматических пружин систем виброизоляции введением элементов отрицательной жесткости//Проблемы машиностроения и надежности машин, 1995, №3, с.27-28); таким образом, для изменения собственной частоты системы на 1 Гц, например с 3 до 2 Гц, требуется увеличение объема каждой из дополнительных камер 7 в 1,52=2,25 раза, соответственно при изменении собственной частоты системы с 3 до 1 Гц объем каждой из дополнительных камер 7 должен быть увеличен в 4 раза, что ведет к резкому увеличению габаритно-массовых характеристик системы и в ряде случаев неприемлемо.
Следует также отметить, что увеличение габаритно-массовых характеристик маятниковой подвески в случае применения указанного выше способа неизбежно приведет либо к снижению точности угловой стабилизации подвешенного объекта (особенно в случае углового отклонения оси подвеса маятника от вертикальной оси), либо к необходимости увеличения жесткости пневмомеханического возбудителя двойного действия и, как следствие, к увеличению габаритно-массовых характеристик маятниковой подвески в целом.
Техническим результатом изобретения является повышение точности угловой стабилизации подвешенного объекта, обеспечение его защиты от резонансных колебаний в процессе эксплуатации, повышение надежности и снижение габаритно-массовых характеристик маятниковой подвески.
Это достигается тем, что в способе защиты объекта на маятниковой подвеске от резонансных колебаний, включающем установку враспор пневмоупругих элементов в виде резинокордных оболочек, образующих пневмопривод двойного действия, в процессе эксплуатации подвески автоматически регулируют частоты ее собственных колебаний, при этом контролируют частоты возбуждений от действия на упомянутую подвеску внешних и внутренних возмущающих факторов, сравнивают с собственной частотой подвески и при их критическом сближении изменяют жесткость установленных враспор пневмоупругих элементов и, как следствие, собственную частоту подвески путем согласованного увеличения или уменьшения давления сжатого газа в их рабочих камерах из резинокордных оболочек, определяемого из следующих зависимостей:
P=[mIV(4π2Iλ2-g)]/2nS2a2 - для случая, когда изменения объема пневмоупругого элемента малы относительно начального объема,
где m - масса системы, кг;
I - расстояние от центра тяжести маятниковой подвески до оси вращения, м;
V - начальный объем пневмоупругого элемента, м3;
λ - частота собственных колебаний маятниковой подвески, Гц;
g=9,81 м/с2 - ускорение свободного падения;
n - показатель политропы (1≤n≤1,4; для низких и инфранизких частот (до 1,5 Гц) n=1, а свыше 1,5 Гц - n=1,4);
S - площадь поршня пневмоупругого элемента, м;
а - расстояние от оси вращения маятниковой подвески до точек крепления к ней установленных враспор пневмоупругих элементов, м;
P=[m(4π2Iλ2-g)+2a2P0(∂S/∂|δ=0)]/2a2[nS2+V(∂S/∂|δ=0)] - для случаев, когда площадь пневмоупругого элемента изменяется при перемещении δ,
где P0 - атмосферное давление, Па;
δ - перемещение пневмоупругого элемента, м.
При этом в устройстве для осуществления указанного способа, содержащем маятниковую подвеску в виде одностепенного жесткого маятника с платформой, точка подвеса которого шарнирно связана с несущей конструкцией транспортного средства, а другой конец шарнирно прикреплен к узлу соединения шарнирно установленных враспор относительно несущей конструкции транспортного средства пневмоупругих элементов, образующих пневмопривод двойного действия следящей системы пневмоавтоматики с источником сжатого газа и датчиком давления, система пневмоавтоматики снабжена блоком управления, вход которого через шину данных блока аналого-цифровых преобразователей подключен к выходам блока аналого-цифровых преобразователей акселерометров и датчиков давления, при этом акселерометры установлены в точке подвеса жесткого маятника и в узлах соединения пневмоупругих элементов с несущей конструкций транспортного средства, а датчики давления связаны с рабочими камерами пневмоупругих элементов, выход блока управления через шину выходных данных подключен ко входу блока цифро-аналоговых преобразователей, выходы которого подключены соответственно ко входам последовательно соединенных усилителей мощности, электромеханических преобразователей и пневмораспредилительных устройств.
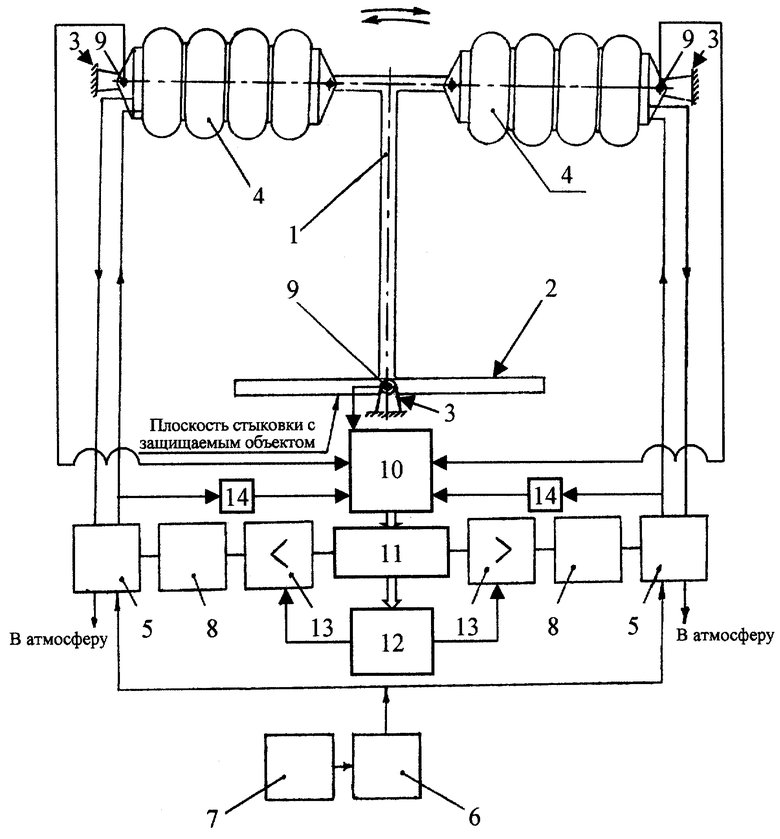
На чертеже изображена функциональная схема одностепенной маятниковой подвески устройства угловой стабилизации с защищаемым объектом, устанавливаемого на транспортном средстве.
Защита объекта, установленного на маятниковой подвеске, от резонансных колебаний, вызываемых действием на подвеску в процессе эксплуатации внешних и внутренних возмущающих факторов, реализована следующим образом.
Маятниковая подвеска представляет собой одностепенной жесткий маятник 1 с платформой 2, один конец которого шарнирно прикреплен к несущей конструкции транспортного средства 3, а другой - к шарнирно установленным враспор относительно несущей конструкции транспортного средства 3 пневмоупругим элементам 4, каждый из которых связан через пневмопроводы с соответствующим пневмораспределительным устройством 5, соединенным с источником сжатого газа, например, ресивером 6 компрессора 7 и атмосферой с одной стороны и с электромеханическим преобразователем 8 - с другой.
В точке подвеса жесткого маятника 1 и в узлах соединения пневмоупругих элементов 4 с несущей конструкцией транспортного средства 3 установлены акселерометры 9, выходы которых подключены через блок аналого-цифровых преобразователей (АЦП) 10 ко входу блока управления (БУ) 11. Выход БУ 11 через шину выходных данных подключен ко входу блока цифро-аналоговых преобразователей (ЦАП) 12, выходы которого подключены соответственно ко входам последовательно соединенных усилителей мощности 13, электромеханических преобразователей 8 и пневмораспредилительных устройств 5. При этом рабочие камеры пневмоупругих элементов 4 связаны с датчиками давления 14, выходы которых подключены к соответствующим входам блока АЦП 10.
Работает устройство защиты объекта на маятниковой подвеске от резонансных колебаний в условиях эксплуатации следующим образом.
В процессе эксплуатации установленной на транспортном средстве 3 маятниковой подвески в виде жесткого маятника 1 и платформы 2 с защищаемым объектом (на чертеже условно не показан) с помощью акселерометров 9 осуществляется непрерывный контроль характеристик возбуждающих частот от действия на упомянутую подвеску внешних и внутренних возмущающих факторов. При этом сигналы от акселерометров 9 поступают через блок АЦП 10 в БУ 11, где после их обработки производится сравнение характеристик возбуждающих частот с собственной частотой подвески. В случае их критического сближения в БУ 11 вырабатываются управляющие сигналы, которые через блок ЦАП 12 и усилители мощности 13 поступают на исполнительные органы - электромеханические преобразователи 8, связанные с пневмораспределительными устройствами 5. В зависимости от необходимости повышения или понижения собственной частоты подвески производится соответственно повышение или понижение жесткости пневмоупругих элементов 4 за счет соединения их рабочих камер при помощи пневмораспределительных устройств 5 с атмосферой или с источником сжатого газа - ресивером 6, в котором компрессором 7 поддерживается необходимый уровень давления. При этом связь давления в рабочих камерах пневмоупругих элементов 4 с параметрами маятниковой подвески осуществляется по приведенным выше формулам, выведенным из известных формул, связывающих частоту собственных колебаний жесткого маятника с установленными враспор упругими элементами с его массой, геометрическими параметрами и жесткостью упругих элементов, с одной стороны (Справочник проектировщика промышленных, жилых и общественных зданий и сооружений. Расчетно-теоретический. Под ред. д.т.н., проф. А.А.Уманского. Государственное издательство литературы по строительству, архитектуре и строительным материалам. М.: 1960. С.965-996, табл. 22.24, схема на стр. 967), и жесткость пневмоупругих элементов 4, выполненных, например, в виде резинокордных оболочек с давлением в рабочих камерах и их геометрическими параметрами с учетом показателя политропы (Синев А.В., Соловьев B.C. Повышение внутреннего демпфирования пневматических пружин систем виброизоляции введением элементов отрицательной жесткости//Проблемы машиностроения и надежности машин, 1995, №3, с.27-28).
Проиллюстрируем зависимость собственной частоты маятниковой подвески от давления в рабочих камерах пневмоупругих элементах при следующих их параметрах:
m=100 кг - масса системы,
I=0,5 м - расстояние от центра тяжести маятниковой подвески до оси вращения;
V=0,01 м3 - начальный объем пневмоупругого элемента;
g=9,81 м/с2 - ускорение свободного падения;
n=1,4 - показатель политропы (1≤n≤1,4; для низких и инфранизких частот (до 1,5 Гц) n=1, а свыше 1,5 Гц - n=1,4);
S=0,018 м2 - площадь поршня пневмоупругого элемента;
а=1 м - расстояние от оси вращения маятниковой подвески до точек крепления к ней установленных враспор пневмоупругих элементов.
При λ=1 Гц (частота собственных колебаний маятниковой подвески, Гц) Р=0,612 атм=61,2 кПа.
При λ=2 Гц P=4,071 атм=407,1 кПа.
При λ=3 Гц Р=9,836 атм=983,6 кПа.
Предлагаемые способ и устройство позволят обеспечить защиту подвешенного объекта от резонансных колебаний в процессе эксплуатации и, как следствие, повысить точность угловой стабилизации, а также повысить надежности и упростить конструкцию и снизить габаритно-массовые характеристики маятниковой подвески.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ ПОДВЕШЕННОГО ОБЪЕКТА НА ТРАНСПОРТНОМ СРЕДСТВЕ | 2000 |
|
RU2181683C2 |
| Устройство управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755534C1 |
| УСТАНОВКА ДЛЯ ВИБРОУДАРНОЙ ОБРАБОТКИ ДЕТАЛЕЙ | 2007 |
|
RU2419532C2 |
| Способ защиты от вибрации и устройство для его осуществления | 2017 |
|
RU2669914C2 |
| Вибрационная резонансная планетарно-шаровая мельница | 2022 |
|
RU2819319C1 |
| Способ определения нестационарных углов тангажа и крена и устройство для его реализации | 2022 |
|
RU2780360C1 |
| ГРАДИЕНТОМЕТРИЧЕСКИЙ СЕЙСМОПРИЕМНИК | 2010 |
|
RU2439623C1 |
| Пневматический упругий элемент | 1983 |
|
SU1094994A1 |
| ВИБРАЦИОННАЯ ИЗМЕЛЬЧИТЕЛЬНАЯ МАШИНА | 2015 |
|
RU2604005C1 |
| Стенд для испытаний на ударные воздействия | 2016 |
|
RU2625639C1 |
Изобретение относится к области систем защиты от резонансных колебаний, в частности подвешенных аэростатных платформ с вращающимися антеннами радиолокационных станций. Устройство включает установку враспор пневмоупругих элементов в виде резинокордных оболочек, образующих пневмопривод двойного действия, и систему автоматической регулировки частоты собственных колебаний маятниковой подвески путем изменения давления в рабочих камерах пневмопривода двойного действия. Система снабжена блоком управления, вход которого через шину данных блока аналого-цифровых преобразователей подключен к выходам блока аналого-цифровых преобразователей акселерометров и датчиков давления. Акселерометры установлены в точке подвеса жесткого маятника и узлах соединения пневмоупругих элементов с несущей конструкцией транспортного средства. Датчики давления связаны с рабочими камерами пневмоупругих элементов. Выход блока управления через шину выходных данных подключен к входу блока цифро-аналоговых преобразователей, выходы которого подключены соответственно ко входам последовательно соединенных усилителей мощности, электромеханических преобразователей и пневмораспределительных устройств. Способ характеризуется использованием указанного устройства. Технический результат - повышение точности угловой стабилизации. 2 н.п. ф-лы, 1 ил.
P=[mIV(4π2Iλ2-g)]/2nS2a2 - для случая, когда изменения объема пневмоупругого элемента малы относительно начального объема, где
m - масса системы, кг;
I - расстояние от центра тяжести маятниковой подвески до оси вращения, м;
V - начальный объем пневмоупругого элемента, м3;
λ - частота собственных колебаний маятниковой подвески, Гц;
g=9,81 м/с2 - ускорение свободного падения;
n - показатель политропы (1≤n≤1,4; для низких и инфранизких частот до 1,5 Гц n=1, а свыше 1,5 Гц n=1,4);
S - площадь поршня пневмоупругого элемента, м2;
а - расстояние от оси вращения маятниковой подвески до точек крепления к ней установленных враспор пневмоупругих элементов, м;
P=[m(4π2Iλ2-g)+2a2P0(∂S/∂δ|δ=0)]/2a2[nS2+V(∂S/∂δ|δ=0)] - для случаев, когда площадь пневмоупругого элемента изменяется при перемещении δ,
где Р0 - атмосферное давление, Па;
δ - перемещение пневмоупругого элемента, м.
| УСТРОЙСТВО УГЛОВОЙ СТАБИЛИЗАЦИИ ПОДВЕШЕННОГО ОБЪЕКТА НА ТРАНСПОРТНОМ СРЕДСТВЕ | 2000 |
|
RU2181683C2 |
| US 4207957 С1, 17.06.1980 | |||
| Способ приготовления пластифицирующей добавки для бетонной смеси | 1988 |
|
SU1564139A1 |

