Изобретение относится к автоматическому управлению исполнительными механизмами и может использоваться, например, в транспортных роботах.
Цель изобретения - повышение быстродействия.
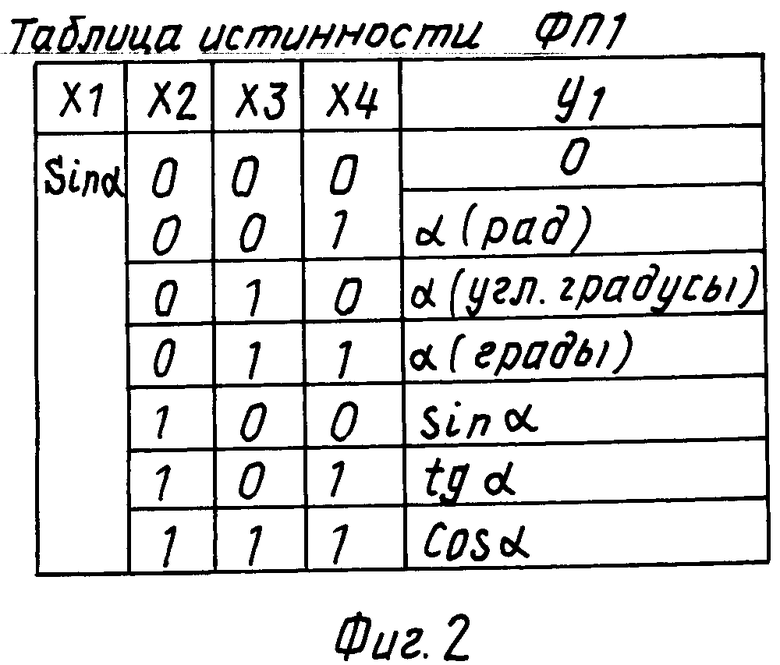
На фиг. 1 представлена структурная электрическая схема устройства; на фиг. 2 - таблица истинности.
Устройство для определения курсового угла исполнительного механизма содержит первый (передний) 1 и второй (задний) 2 дальномеры, задающий генератор 3 и вычислитель 4. Вычислитель 4 содержит блок 5 вычитания, первый и второй квадраторы 6 и 7, сумматор 8, деквадратор 9, делитель 10, функциональный преобразователь 11.
Сущность предлагаемого способа состоит в следующем.
Производят измерения (например, локационные) с борта исполнительного механизма по двум каналам и вычисляют курсовой угол по отношению к оси ортодромии, причем измерения производят синхронно и во времени по обоим каналам определяют дальности r1 и r2, например по времени задержки отраженных локационных импульсов, а расчет угла α для параллельного положения каналов измерения, расположенных нормально к продольной оси исполнительного механизма, производят по формуле α= arcSin ,
,
Способ предназначен для "быстрого" вычисления ошибки курса α по одному разовому замеру дальностей.
Устройство для осуществления способа работает следующим образом.
Исполнительный механизм (не показан) расположен коллинеарно положению дальномеров 1 и 2. Дальномеры 1, 2 жестко закреплены между собой на базовом расстоянии d друг от друга. По переднему фронту импульса задающего генератора 3 дальномеры 1 и 2 излучают синхронно зондирующие импульсы. Эти импульсы распространятся в параллельных друг другу направлениях.
Отражаясь от протяженной поверхности, зондирующие импульсы воспринимаются приемниками дальномеров 2 и 3. Дальномеры преобразуют времена задержек зондирующих импульсов в аналоговые электрические сигналы, адекватные измеренным расстояниям r1 и r2, которые поступают на блок 5 вычитания. На соответствующие другие входы блока 5 подаются напряжения, соответствующие величине конструктивной постоянной ±k1. С выхода блока 5 сигнал, равный разности входных сигналов, поступает на вход делителя 10.
На вход второго квадратора 7 заводится постоянное напряжение, например, с потенциометра (не показан), уровень которого адекватен базовому расстоянию d, умноженному на конструктивную постоянную k2. С выхода квадратора 7 снимается сигнал, амплитуда которого адекватна величине (k2d)2. Этот сигнал суммируется с сигналом, формируемым первым квадратором 6, на устройстве 8. Напряжение, амплитуда которого равна сумме амплитуд входных сигналов сумматора 8, поступает на вход деквадратора 9. На выходе деквадратора 9 формируется напряжение, равное по величине квадратному корню из входного напряжения.
На выходе делителя 10 формируется аналоговый сигнал ХI, амплитуда которого адекватна величине sinα . Этот сигнал поступает на информационный вход функционального преобразования 11. На его установочные входы Х2, Х3, Х4 поступает цифровой двоичный код (например, с пульта управления).
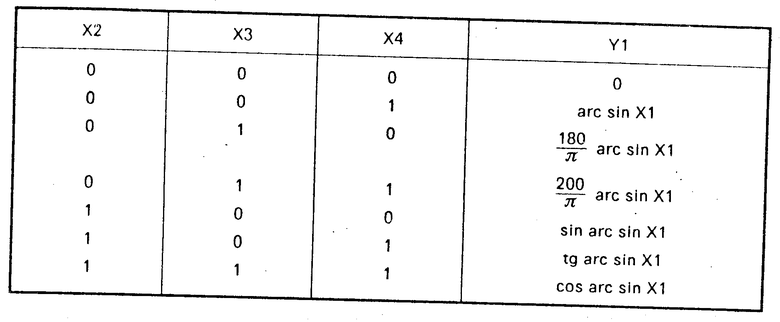
В соответствии с таблицей истинности, приведенной на фиг. 2, можно по одному и тому же выходу устройства получить различные навигационные параметры искомой величины α . Различные представления искомой величины α очень удобны для автоматических навигаторов. Это измерение искомой величины α в радианах, в угловых градусах, в градах и, наконец, вычисление тригонометрических функций искомой величины sin α , tg α , cosα .
Зависимости пересчета сведены в таблицу.
(56) Винницкий А. С. Автономные радиосистемы. М. : Радио и связь, 1986, с. 286.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВИГАЦИОННОГО ИЗМЕРЕНИЯ РАССТОЯНИЯ ПО НОРМАЛИ МЕЖДУ ПРОТЯЖЕННЫМ ОБЪЕКТОМ И ТОЧКОЙ ПОВЕРХНОСТИ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА И АВТОМАТИЧЕСКИЙ НАВИГАТОР ДЛЯ ИЗМЕРЕНИЯ РАССТОЯНИЯ ПО НОРМАЛИ МЕЖДУ ПРОТЯЖЕННЫМ ОБЪЕКТОМ И ТОЧКОЙ ПОВЕРХНОСТИ ИСПОЛНИТЕЛЬНОГО МЕХАНИЗМА | 1990 |
|
RU2068570C1 |
| Стенд для испытаний промышленных роботов | 1988 |
|
SU1678604A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ВОЛНЕНИЯ | 2008 |
|
RU2384861C1 |
| УСТРОЙСТВО ДЛЯ МОДЕЛИРОВАНИЯ ИМПУЛЬСНОГО РАДИОДАЛЬНОМЕРА С АВТОМАТИЧЕСКИМ СОПРОВОЖДЕНИЕМ РАССТОЯНИЯ ДО ДИЭЛЕКТРИЧЕСКОГО СЛОЯ | 1992 |
|
RU2069892C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТРЕХМЕРНЫХ КООРДИНАТ | 1991 |
|
RU2015564C1 |
| УСТРОЙСТВО ДЛЯ ОБТОЧКИ КРИСТАЛЛОВ | 1991 |
|
RU2030998C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2253825C1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ МЕСТОПОЛОЖЕНИЯ ГИДРОСАМОЛЕТА НА ПОВЕРХНОСТИ МОРЯ | 1990 |
|
RU1797300C |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2292523C2 |
| РАДИОДАЛЬНОМЕР | 2000 |
|
RU2197000C2 |
Сущность изобретения: устройство для осуществления способа определения курсового угла исполнительного механизма содержит два дальномера (1, 2), 1 задающий генератор (3), 1 вычислитель (4), включающий 1 блок вычитания (5), 2 квадратора (6, 7), 1 сумматор (8), 1 деквадратор (9), 1 делитель (10) и 1 функциональный преобразователь (11). 1 - 5 - 6 - 8 - 9 - 10 - 11; 2 - 5; 3 - 1; 3 - 2; 5 - 10; 7 - 8. 2 с. п. ф-лы, 2 ил.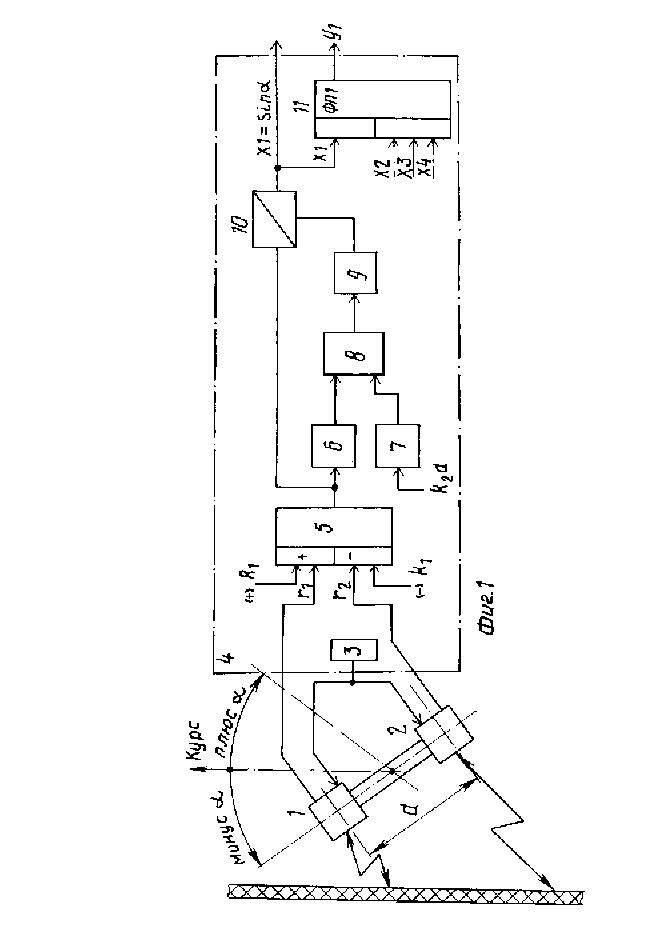
α= arcSin ,
,
где k1 и k2 - конструктивные постоянные, зависящие от размещения измерителей дальности на корпусе исполнительного механизма;
d - расстояния между точками, из которых измеряют расстояния.
