Изобретение относится к электротехнике, в частности к способам управления многодвигательными электроприводами с индивидуальными силовыми преобразователями и упругими механическими передачами от электродвигателей к общей массе, применяемыми в опорно-поворотных устройствах, а также в рабочих машинах прессовой группы бумагоделательного, химического, текстильного и другого оборудования.
Основными требованиями, предъявляемыми к указанным многодвигательным электроприводам являются: высокая точность и быстродействие в управлении движением общей массы, равномерное распределение нагрузок электродвигателей в условиях вариаций параметров системы.
Известен способ управления многодвигательным электроприводом, основанный на раздельном формировании управляющих воздействий на каждый электродвигатель в зависимости от значений его тока и скорости по принципу подчиненного регулирования, и формирования дополнительных управляющих воздействий на каждый ведомый электродвигатель, в зависимости от величины его тока. При этом обеспечивается более равномерная загрузка электродвигателей.
Однако из-за наличия упругих механических передач и взаимных связей электроприводов не может быть достигнуто высокое качество управления движением общей массы; сохраняется высокая чувствительность системы к вариациям внутренних параметров.
Известен также способ управления сложными динамическими системами, основанный на использовании эталонной модели, сравнении одноименных координат состояния объекта и модели и реализации на основе результатов сравнения, алгоритма параметрической адаптации регуляторов. Способ позволяет обеспечить снижение чувствительности системы к возможным изменениям параметров; однако темп изменения параметров должен быть значительно ниже быстродействия основного контура управления. Кроме того, способ не может быть непосредственно применен для управления многодвигательным электроприводом, поскольку наличие однотипных параллельных каналов в виде отдельных электроприводов приводит к потере свойства полной управляемости системы по состоянию, что затрудняет синтез регуляторов и, как следствие, их адаптацию.
Наиболее близким техническим решением является способ управления электроприводами путем формирования основного управляющего воздействия на электроприводы в зависимости от полного вектора состояния ведущего канала, включающего электропривод и n-ю часть общей массы, где n - количество электродвигателей, и формирования дополнительных управляющих воздействий на ведомые электроприводы в зависимости от результатов сравнения одноименных координат состояния соответствующего ведомого и ведущего электропривода, причем темп формирования дополнительных управляющих воздействия устанавливается выше темпа основного управляющего воздействия.
Применение принципа разделения темпов движения при отработке основного и дополнительных управляющих воздействий и реализация управления по координатам состояния системы позволяет получить малоколебательные быстропротекающие процессы и равномерно распределить нагрузку на электродвигатели при условии соответствия параметров электроприводов тем значениям, которые приняты при настройке системы, или их незначительном отличии (на 10-20% ).
Однако при изменении параметров системы в большем диапазоне значений, в особенности в ведущем электроприводе, качественные показатели системы резко ухудшаются.
Технический результат заключается в повышении точности и быстродействия в управлении движением общей массы, достижении одинаковой загрузки электродвигателей в условиях значительного изменения параметров электроприводов.
Технический результат обеспечивается тем, что основное управляющее воздействие на электроприводы формируют, в зависимости от полного вектора состояния эталонной модели ведущего канала, включающего электропривод, n-ю часть момента инерции общей массы и учитывающую действие возмущений, а дополнительные управляющие воздействия формируют на основе полного вектора состояния, определяемого разностью значений одноименных координат модели и соответствующего ведомого канала, включающего электропривод и n-ю часть общей массы, считая каналы независимыми.
Формирование основного и дополнительных управляющих воздействий в зависимости от полного вектора состояния эталонной модели ведущего канала позволяет сохранять оптимальную (эталонную) форму управления электроприводами независимо от изменений их реальных параметров.
Формирование с высоким темпом дополнительных управляющих воздействий на основе результатов попарного сравнения координат состояния эталонной модели и однотипных координат каждого ведомого канала, включая скорость общей массы, обеспечивает быстрое устранение с заданным качеством возможных отклонений движения каналов от движения, задаваемого эталонной моделью по всем координатам состояния. Этим достигается идентичность каналов, несмотря на возможные вариации их параметров, и равномерное распределение нагрузки на электродвигатели.
Более высокий темп вспомогательных управляющих воздействий по сравнению с темпом основного управляющего воздействия удается обеспечить в условиях тех же ограничений на координаты электроприводов, благодаря тому, что они формируются не на основе абсолютных значений, а на основе отклонений координат каналов от одноименных координат эталонной модели.
Формирование управляющих воздействий на основе сравнения координат состояния объекта и эталонной модели является известным техническим решением в области систем автоматического управления. Однако в данном случае оно применено с учетом специфики многодвигательного электропривода, а именно, использована не традиционная модель всего объекта или системы, а эталонная модель только одного (ведущего) канала при искусственным отделении n-й части инерции общей массы.
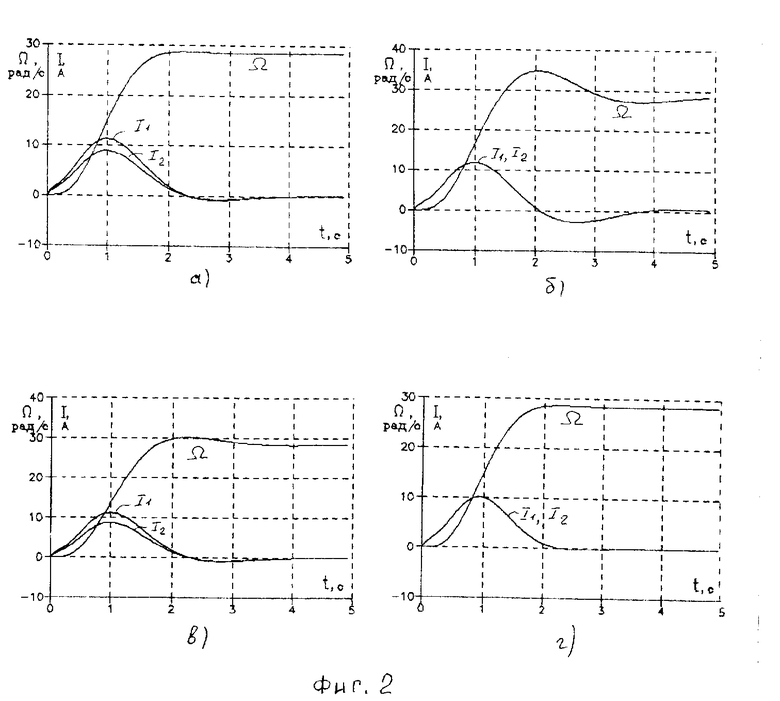
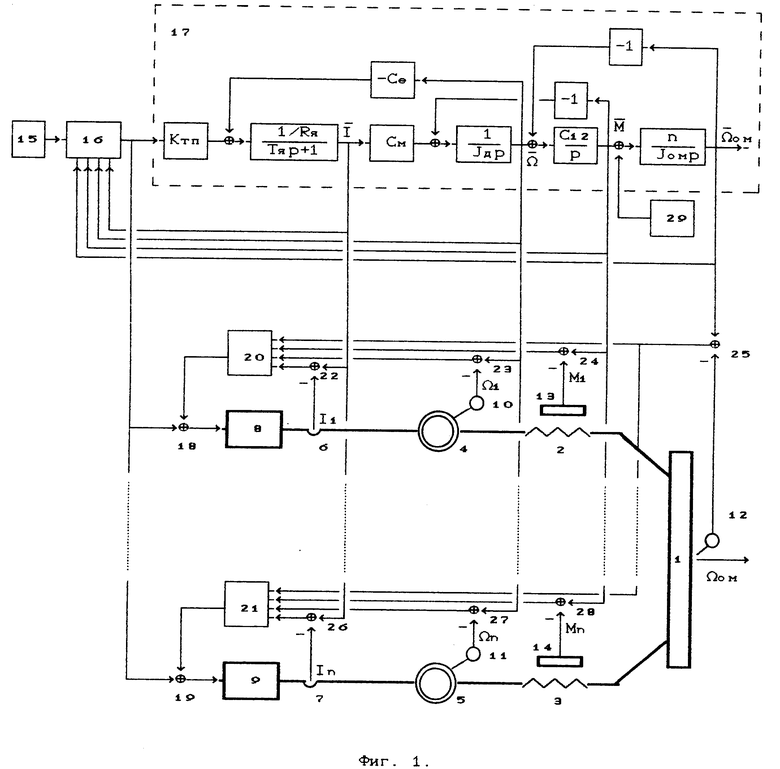
На фиг. 1 представлена функциональная схема многодвигательного электропривода, реализующая предложенный способ; на фиг. 2 (а, б, в, г) - диаграммы изменения основных координат состояния системы, в соответствии с прототипом, при изменении сопротивления цепи якоря ведущего (б) и ведомого (в) двигателей на 30% от принятых при синтезе регуляторов, а также в соответствии с предложенным решением без модели возмущающих воздействий (а) и с моделью (г) при десятикратном изменении сопротивления цепи якоря одного из двигателей.
Многодвигательный электропривод имеет общую массу 1, связанную через упругие механические передачи 2, 3 с валами электродвигателей 4, 5. Силовые цепи электродвигателей 4, 5 с датчиками тока 6, 7 подключены к выходам силовых преобразователей 8, 9. Датчики скорости 10, 11 и 12 установлены на валах соответствующих электродвигателей 4, 5 и общей массы 1, а датчики момента 13, 14 - на соответствующих механических передачах 2, 3.
Задатчик скорости 15 подключен к входу основного модального регулятора 16, связанного другими своими выходами с выходами эталонной модели 17 ведущего канала системы.
Выход основного модального регулятора 16 подключен к первому входу модели канала системы 17 и к первым входам сумматоров 18, 19, связанных вторыми входами со вспомогательными модальными регуляторами 20, 21. Выходы сумматоров 18, 19 подключены к входам соответствующих силовых преобразователей 8, 9.
Каждый из входов вспомогательных регуляторов 20 или 21 связан с соответствующими выходами одного из четырех блоков сравнения 22, 23, 24, 25 или 26, 27, 29, 25. Неинвертирующий вход каждого блока сравнения связан с одним из выходов модели 17, а инвертирующий вход соединен с соответствующим выходом одноименного датчика 6, 10, 13 и 12 или 7, 11, 14 и 12. Ко второму входу модели ведущего канала подключен выход модели возмущений 29.
Модельные регуляторы 16, 20, 21 выполняются в виде обычных суммирующих усилителей (например, операционных усилителей в пропорциональном режиме). Они называются модальными, поскольку на их входы поступает информация о всех переменных состояния динамической системы, а коэффициенты усиления по этим входам подбираются таким образом, чтобы обеспечить определенное (заданное) распределение корней характеристического уравнения системы. Их синтез ведется традиционными методами теории модального управления.
Эталонная модель 17 представляет собой динамическую модель ведущего канала системы, включающего электропривод (электродвигатель с силовым преобразователем и механической передачей) и n-ю часть общей массы. В большинстве практических случаев ведущий канал может быть представлен в виде двухмассовой электромеханической системы, как это показано на структурной схеме фиг. 1, где Kтп - коэффициент передачи силового преобразователя; Rя, Тя, Iд - сопротивление якорной цепи, электромагнитная постоянная времени и момент инерции электродвигателя; Се, См - его конструктивные коэффициенты; С12 - коэффициент жесткости механической передачи; Iсм - приведенный момент инерции общей массы.
Эталонная модель 17 может быть выполнена на моделирующих элементах любого типа (электрических, механических, пневматических и др. ), имеющих динамические характеристики, аналогичные характеристикам реальных звеньев электропривода и высокую стабильность собственных параметров. Наиболее целесообразно ее использование на базе цифровых электронных устройств, в частности, аппаратно-программных средств микропроцессорной техники, функционирующих в реальном времени.
Модель 29 возмущений строится аналогично модели 17. Ее структура должна быть такой, чтобы обеспечить возможно более точное воспроизведение возмущающих воздействий реального канала многодвигательного электропривода в различных режимах работы. В простейшем случае модель 29 может строиться как стабилизированный источник регулируемого по величине сигнала момента нагрузки электропривода (фиг. 1). При этом величина сигнала изменяется в зависимости от режима работы системы (вариациях усилия прижима валов рабочих машин прессовой группы, изменений ветровой нагрузки или состояния смазки опорно-поворотных устройств и т. п. ).
Устройство работает следующим образом.
Формирование основного управляющего воздействия в зависимости от координат состояния эталонной модели 17, а не реального ведущего канала позволяет задать эталонную траекторию движения всем локальным электроприводам, не зависящую от изменений параметров реальных звеньев, поскольку последние не входят в состав модели, и отсутствует их влияние на модель ведущего канала через общую массу.
Возможные отклонения реальных координат каналов от соответствующих эталонных значений модели 17, включая скорость общей массы, относительно быстро компенсируются за счет вспомогательных управляющих воздействий, формируемых локальными модальными регуляторами 20, 21, которые приближают динамические характеристики реальных электроприводов к характеристикам эталонной модели. Компенсация всех несоответствий ведомых каналов координатам эталонной модели осуществляется с заданным качеством при высоком быстродействии и заканчивается прежде, чем происходит сколь-либо существенное движение общей массы.
Звенья реальных электроприводов с варьируемыми параметрами оказываются охваченными совокупностью "сильных" обратных связей по всем координатам состояния канала и, кроме того, лишенными возможности влияния на формирователь основного управляющего воздействия через общую массу, чем достигается значительное снижение отрицательного влияния параметрических возмущений.
В результате, даже при значительных изменениях параметров реальных электроприводов, сохраняются гораздо более стабильные динамические характеристики многодвигательной системы (фиг. 2-а) и обеспечивается более равномерная загрузка (равенство токов силовой цепи) приводных электродвигателей по сравнению с соответствующими показателями системы, в которой функции ведущего выполняет один из реальных каналов многодвигательного электропривода в соответствии с прототипом (фиг. 2-Б, В).
Наличие модели возмущений позволяет сформировать траекторию изменений координат всех ведомых каналов, в более полной мере соответствующую реальным условиям их работы, и тем самым дополнительно стабилизировать результирующие характеристики многодвигательного электропривода (фиг. 2-а, г).
Использование предлагаемого способа позволяет повысить разрешающую способность (расширить полосу пропускания) следящих опорно-поворотных устройств, снизить массогабаритные показатели силовой части электропривода и механических передач, повысить надежность и срок службы электрооборудования, механических передач и элементов технологических машин. (56) Шестаков В. М. Системы электропривода бумагоделательного производства, М. , Лесная промышленность, 1898-240 с.
Борцов Б. А. , Поляков Н. Д. , Путов В. В. Электромеханические системы с адаптивным и модальным управлением. - Л. , Энергоатомиздат, 1984, - 16 с.
Воронов А. А. Введение в динамику сложных управляемых систем, М: Наука, Главная редакция физико-математической литературы, 1985, 352 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 2001 |
|
RU2185019C1 |
| Способ управления многодвигательным электроприводом | 1990 |
|
SU1767692A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЗАИМОСВЯЗАННЫМИ ЭЛЕКТРОПРИВОДАМИ (ВАРИАНТЫ) | 2006 |
|
RU2316886C1 |
| СПОСОБ УПРАВЛЕНИЯ ДИНАМИЧЕСКИМИ ОБЪЕКТАМИ ПО ЗАДАННЫМ ПОКАЗАТЕЛЯМ КАЧЕСТВА (ВАРИАНТЫ) | 2003 |
|
RU2261466C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫТЯГИВАНИЕМ ВОЛОКНА ПРИ ФОРМОВАНИИ | 2003 |
|
RU2237759C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ВЫТЯГИВАНИЕМ ВОЛОКНА ПРИ ФОРМОВАНИИ | 2003 |
|
RU2235810C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ НАСТРОЙКИ РЕГУЛЯТОРА | 2019 |
|
RU2714567C1 |
| СПОСОБ УСТРАНЕНИЯ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ ВОЗМУЩЕНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ | 2016 |
|
RU2648930C1 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
Использование: может быть использовано для управления многодвигательными электроприводами опорно - поворотных устройств. Сущность: для повышения точности и быстродействия основное управляющее воздействие формируют по полному вектору состояния модели ведущего канала, учитывающей действие возмущений и включающей электропривод и n - ю часть общей массы, где n - количество электродвигателей, производят попарное сравнение всех координат ведомых каналов с соответствующими координатами модели, по результатам которого формируют дополнительные управляющие воздействия на ведомые электроприводы с темпом, более высоким, чем темп основного управляющего воздействия, считая ведомые каналы независимыми. 2 ил.
СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ с упругими механическими передачами от электродвигателей и общей массы путем формирования основного управляющего воздействия на электроприводы в зависимости от полного вектора состояния ведущего канала, включающего электропривод и n-ю часть общей массы, где n - количество электродвигателей, и формирования дополнительных управляющих воздействий на ведомые электроприводы в зависимости от результатов сравнения одноименных координат состояния соответствующего ведомого и ведущего электроприводов, причем темп формирования дополнительных управляющих воздействий устанавливается выше темпа основного управляющего воздействия, отличающийся тем, что в качестве ведущего канала используют эталонную модель, учитывающую действие возмущений, а дополнительные управляющие воздействия формируют на основе полного вектора состояния, определяемого разностью значений одноименных координат модели и соответствующего ведомого канала, включающего электропривод и n-ю часть общей массы, считая ведомые каналы независимыми.
