Изобретение относится к электротехнике и может быть использовано для управления реверсивными многодвигательными электроприводами с индивидуальными силовыми преобразователями и упругими механическими передачами с зазорами от электродвигателей к общей массе, применяемыми в опорно-поворотных устройствах различного назначения, металлообрабатывающих станках, механизмах металлургического производства и т.п.
К числу основных требований, предъявляемых к указанным электроприводам, относятся высокие показатели надежности работы, а также точности и быстродействия при управлении движением общей массы.
Известен [1, 2] способ управления двухдвигательным электроприводом с зазорами в кинематических передачах по принципам электромеханического торсиона (распора) и подчиненного регулирования координат (тока и скорости), основанный на раздельном формировании управляющих воздействий на каждый электродвигатель в зависимости от разности заданного и действительного значений скорости общей массы, применении корректирующих воздействий на электродвигатели по сумме их скоростей таким образом, что в определенном диапазоне скоростей и моментов нагрузки общей массы электродвигатели развивают моменты разного знака (направления), исключая тем самым влияние зазоров на динамику системы, а за пределами этого диапазона работают в тандеме, развивая одинаковые по величине и знаку моменты и обеспечивая тем самым максимальную перегрузочную способность объединенного электропривода.
Однако при выходе значений скорости и нагрузочного момента общей массы за пределы установленного диапазона происходит раскрытие зазоров передач, возникают колебательные процессы в электрической и механической частях электропривода, что приводит к их повышенному износу, снижению надежности системы и ухудшению качества управления движением рабочего органа. При наличии упругих звеньев в кинематических передачах ухудшения показателей качества и надежности становятся более значительными.
Известен также [3] способ управления двухдвигательным электроприводом по тем же принципам электромеханического распора и подчиненного регулирования тока и скорости с раздельным формированием управляющих воздействий на электродвигатели в зависимости от результата сравнения заданного и действительного значений скорости общей массы, формированием корректирующих воздействий на электродвигатели в зависимости от суммы их скоростей с той разницей, что момент одного из электродвигателей во всем диапазоне скоростей и нагрузочных моментов общей массы устанавливается меньше момента другого электродвигателя, а при нулевой скорости эти моменты оказываются равными по величине и противоположными по знаку.
Это снижает вероятность раскрытия зазоров в различных режимах работы электропривода при использовании жестких кинематических передач и тем самым способствует повышению показателей качества и надежности, но не исключает вероятность перемещения кинематических передач через зазор при реверсе электропривода и не позволяет сохранить высокие технические показатели при наличии упругих кинематических звеньев (звеньев малой жесткости), поскольку возможности управления движением общей массы по принципу подчиненного регулирования отдельных координат электропривода оказываются при этом ограниченными.
Наиболее близким техническим решением является [4, 5] способ управления взаимосвязанными электроприводами с упругими звеньями и зазорами в кинематических передачах от электродвигателей к общей массе по принципу электромеханического распора путем формирования противоположных по знаку основных управляющих воздействий для задания движущих моментов электроприводов в зависимости от заданной и действительной скоростей общей массы, а также суммы скоростей электродвигателей и формирования дополнительного управляющего воздействия на каждый электропривод в зависимости от тока его электродвигателя и заданного момента распора.
При таком способе управления электроприводами с жесткими связями может быть полностью исключена возможность перемещения элементов кинематических передач через зазоры, поскольку каждый электродвигатель всегда развивает момент только одного направления (знака), снижается вероятность возникновения резонансных электромеханических колебаний при наличии упругих кинематических звеньев. Этим достигается максимальное снижение износа кинематических передач и повышение надежности системы, а также обеспечиваются наиболее высокие показатели точности и быстродействия при управлении движением общего рабочего органа, благодаря исключению неблагоприятного влияния зазоров.
Однако при снижении жесткостей кинематических передач указанные показатели качества системы существенно ухудшаются из-за недостаточных возможностей управления электроприводами со сложной механической частью по ограниченному количеству координат состояния (на основе принципа подчиненного регулирования тока и скорости).
Технический результат заключается в повышении надежности работы электроприводов, а также точности и быстродействия управления движением общего рабочего органа при наличии упругих элементов и зазоров в кинематических передачах.
В первом варианте способа технический результат обеспечивается тем, что дополнительное управляющее воздействие на каждый электропривод формируют в зависимости от полного вектора состояния этого электропривода, определяемого координатами его силового преобразователя, электродвигателя и кинематической передачи, считая общую массу неподвижной, а основные управляющие воздействия формируют в зависимости от суммы значений одноименных координат полных векторов состояния электроприводов и от координат общей массы, причем темп формирования дополнительных управляющих воздействий задают единым и устанавливают выше темпа формирования основных управляющих воздействий.
Указанные признаки являются отличительными от прототипа, что позволяет сделать вывод о соответствии заявленного технического решения критерию «новизна».
При таком управлении движущий электропривод, обеспечивающий заданное направление вращения общей массы, работает в режиме высокодинамичного источника скорости, а тормозящий - в режиме еще более динамичного источника тормозного момента распора. При смене направления вращения общей массы функции электроприводов также меняются, но направления создаваемых ими моментов, воздействующих на общую массу, остаются постоянными. Формирование основных управляющих воздействий с использованием значений координат полных векторов состояния электроприводов и координат общей массы позволяет обеспечить высокое качество управления рабочим органом, несмотря на влияние упругостей кинематических передач и повышенную сложность механической части, при условии компенсации влияния зазора с темпом, существенно превышающим темп процессов управления рабочим органом. Такая компенсация обеспечивается высокой динамикой создания тормозного момента распора, благодаря формированию дополнительного управляющего воздействия на тормозящий электропривод по полному вектору его состояния, несмотря на влияние упругостей кинематической передачи, причем с темпом, превышающим темп управления общей массой со стороны движущего электропривода. Суммирование значений одноименных координат электроприводов при формировании разнополярных основных управляющих воздействий позволяет реализовать логику «ИЛИ», т.е. логику управления по координатам состояния одного или другого электропривода, являющегося в данный момент времени движущим. Задание единого темпа формирования дополнительных управляющих воздействий позволяет однозначно учесть его при формировании основных управляющих воздействий и тем самым сохранить необходимое качество управления рабочим органом при смене направления вращения.
Такой способ управления позволяет не только обеспечить высокие показатели точности, быстродействия и надежности при движении рабочего органа в заданных направлениях, но позволяет также сохранить эти показатели непосредственно в режимах реверса, т.е. в процессах смены направления вращения общей массы, поскольку и в этих режимах темп формирования тормозящего момента сохраняется опережающим, влияние зазоров передач оказывается своевременно скомпенсированным, а неблагоприятное влияние упругих звеньев обоих электроприводов на динамику системы устраняется путем организации соответствующих управляющих воздействий по векторам состояний электроприводов.
Недостатком данного способа является снижение показателей качества при управлении электроприводами с большим различием параметров. Кроме того, предложенный способ не позволяет обеспечить астатическую (с нулевой ошибкой) стабилизацию тормозного момента электропривода, поскольку использование интегральной составляющей момента при формировании дополнительного управляющего воздействия потребует корректировки обратной связи по скорости общей массы при формировании основных управляющих воздействий, чем нарушит логику изменения функций электроприводов (движущий-тормозящий) при смене направления вращения общей массы. Применение статического принципа регулирования тормозного момента приводит к его вариациям при изменениях скорости электропривода, требует завышения значений момента распора, что в определенной мере снижает энергетические показатели системы.
Этих недостатков лишен второй вариант способа, в котором технический результат достигается тем, что дополнительное управляющее воздействие на каждый электропривод формируют в зависимости от значений координат полного вектора состояния этого электропривода, а также интегральной составляющей момента упругости его кинематической передачи, считая общую массу неподвижной, а основные управляющие воздействия формируют в зависимости от суммы значений моментов упругости кинематических передач и от координат общей массы, причем темпы формирования дополнительных управляющих воздействий устанавливают выше темпа формирования основных управляющих воздействий.
Указанные признаки являются отличительными от прототипа, что позволяет сделать вывод о соответствии заявленного технического решения критерию «новизна».
В этом случае использование интегральной составляющей момента упругости кинематической передачи при формировании дополнительного управляющего воздействия на каждый электропривод позволяет обеспечить астатическую стабилизацию момента распора при любом уровне скорости общей массы и снизить потери энергии. Достижение технического результата в условиях отсутствия информации о значениях координат силовых преобразователей и электродвигателей при формировании основных управляющих воздействий, а также в условиях различий параметров электроприводов обеспечивается более значительным повышением темпа формирования дополнительных управляющих воздействий, а также сохранением обратных связей по сумме моментов упругости кинематических передач и координатам общей массы.
Недостаток второго варианта способа состоит в том, что более значительное повышение темпа формирования дополнительных управляющих воздействий, необходимое для достижения того же технического результата, что и в первом варианте, а также для компенсации различий параметров электроприводов требует соответствующего увеличения установленной мощности силовых элементов электроприводов и приводит к повышению их стоимости.
Этого недостатка лишен третий вариант способа, в котором технический результат достигается тем, что дополнительное управляющее воздействие на каждый электропривод формируют в зависимости от полного вектора состояния этого электропривода, определяемого координатами его силового преобразователя, электродвигателя и кинематической передачи, считая общую массу неподвижной, а основное управляющее воздействие формируют на каждый электропривод в зависимости от значений координат полного вектора состояния этого электропривода и от координат общей массы, причем темпы формирования дополнительных управляющих воздействий устанавливают выше темпов формирования основных управляющих воздействий.
Указанные признаки являются отличительными от прототипа, что позволяет сделать вывод о соответствии заявленного технического решения критерию «новизна».
Раздельное формирование основных управляющих воздействий на электроприводы в зависимости от их собственных координат состояния позволяет обеспечить достижение технического результата при значительном различии параметров электроприводов. При этом темпы формирования дополнительных управляющих воздействий также могут быть различными. Однако так же, как и в первом варианте способа, здесь исключается астатическая стабилизация момента распора, и, кроме того, более сложной оказывается техническая реализация решения.
Таким образом, объединение трех технических решений в одну заявку обусловлено тем, что все способы относятся к объектам одного вида, имеют одинаковое назначение и обеспечивают достижение одного и того же технического результата при некоторых различиях дополнительных факторов.
Формирование управляющего воздействия на ведущий электропривод многодвигательной системы в зависимости от полного вектора состояния этого электропривода и общей массы и формирование опережающего по темпу управляющего воздействия на ведомый электропривод такой системы с использованием информации о полном векторе его состояния при условной неподвижности общей массы, является известным техническим решением [6].
Однако известный способ решает задачу повышения качества управления движением общей массы за счет точной динамической синхронизации электроприводов по всем координатам их состояния в условиях отсутствия зазоров кинематических передач. При этом оба электропривода всегда являются движущими. Управление ведомым электроприводом осуществляют не по самим координатам вектора его состояния, а по разности значений одноименных координат ведущего и ведомого электроприводов.
Непосредственное применение этого способа для высокодинамичного формирования распора путем назначения электроприводам принципиально различных функций движущего и тормозящего каналов (т.е. фактической рассинхронизации электроприводов по координатам состояния) и повышение на этой основе качества и надежности управления движением общей массы в условиях влияния зазоров упругих кинематических передач оказывается невозможным.
В заявленных технических решениях более высокий темп формирования дополнительного управляющего воздействия тормозящего электропривода при условной неподвижности общей массы обеспечивает не его синхронизацию с движущим электроприводом по всем координатам состояния, а высокодинамичное формирование тормозного момента распора и упреждающую выборку (компенсацию) зазоров обеих кинематических передач. Только после этого становится возможным обеспечить высокое качество и надежность управления движением общей массы со стороны движущего электропривода при использовании информации о полном векторе состояния этого электропривода и общей массы.
Таким образом, только в совокупности с логикой формирования основных управляющих воздействий на движущий и тормозящий электроприводы в зависимости от результата сравнения заданной и действительной скоростей общей массы и своевременного перераспределения функций движущего и тормозящего электроприводов при изменениях направления движения рабочего органа обеспечивается достижение искомого технического результата.
Применение интегральных составляющих в законах управления различными координатами состояния объектов для повышения точности в статике и динамике является известным решением, широко применяемым в различных областях техники. Однако специфика его применения во втором варианте способа состоит в том, что повышение точности стабилизации момента распора не приводит к ухудшению динамических показателей управления движением общей массы при смене направления вращения, благодаря предложенным процедурам формирования основных управляющих воздействий на взаимосвязанные электроприводы.
Другие известные решения с признаками, сходными с отличительными от прототипа признаками изобретения, не обнаружены.
Вышеизложенное дает основание сделать вывод о соответствии заявленного способа во всех трех его вариантах критерию «существенные отличия» и подтверждает изобретательский уровень технического решения.
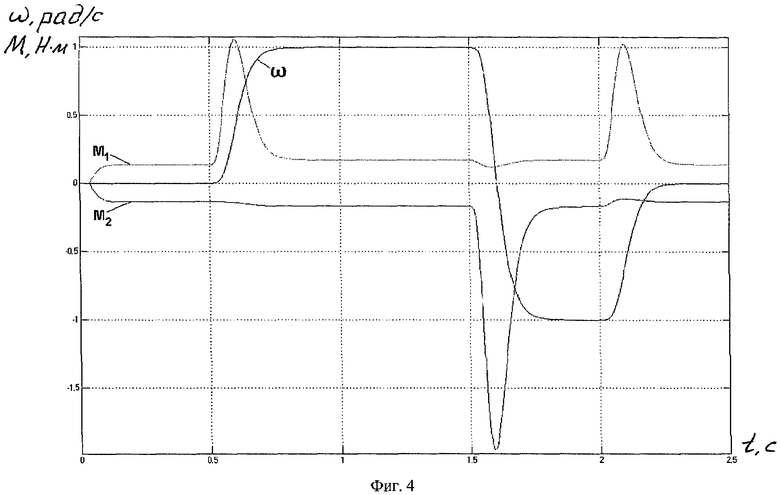
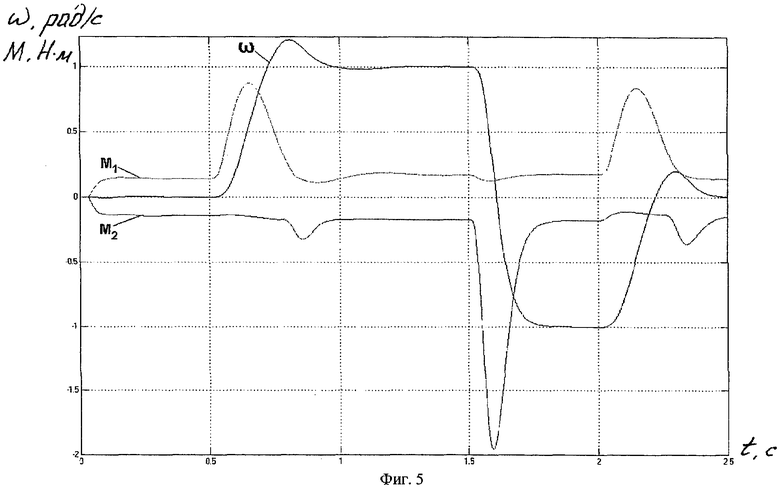
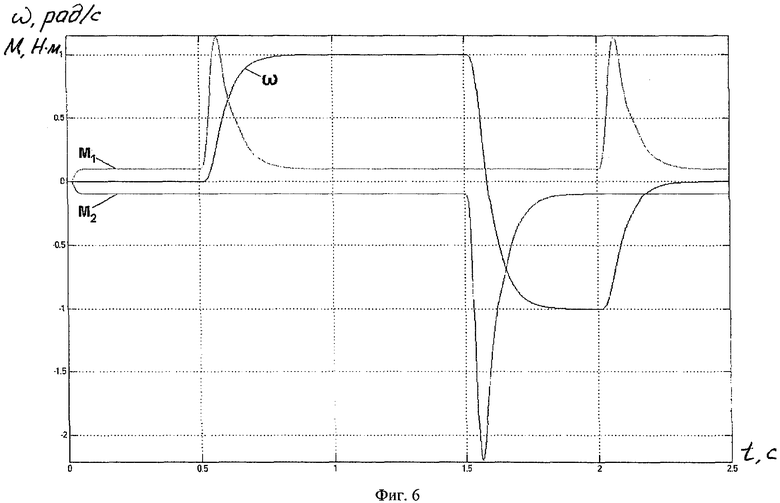
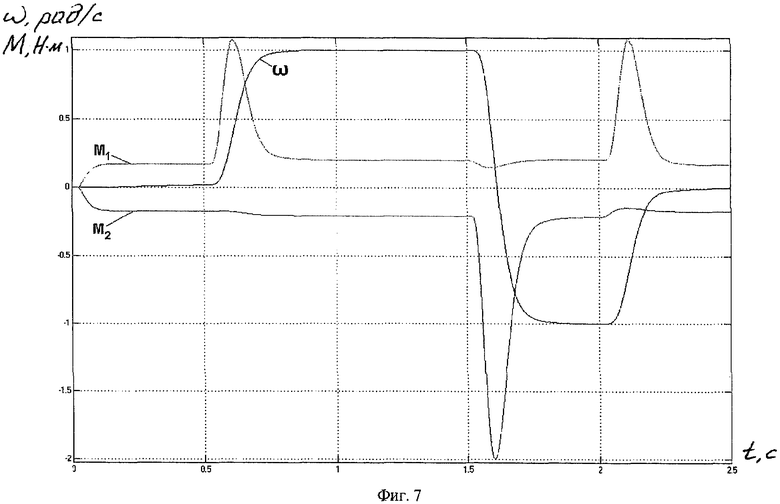
На фиг.1, 2, 3 представлены функциональные схемы систем управления взаимосвязанными электроприводами постоянного тока, реализующие соответственно первый, второй и третий варианты заявленного способа. На фиг.4 и 5 приведены диаграммы изменений основных координат состояния электроприводов при пуске, реверсе и останове без момента нагрузки общей массы для системы, реализующей первый вариант заявленного способа, а на фиг.6 и 7 - аналогичные диаграммы для систем, реализующих соответственно второй и третий варианты заявленного способа. При этом графики на фиг.4 соответствуют случаю использования одинаковых электроприводов, а графики на фиг.5, 6 и 7 - случаю использования электроприводов с различными параметрами: момент инерции электродвигателя первого электропривода в 4 раза больше, чем момент инерции электродвигателя второго электропривода; в механической передаче от первого электропривода к общей массе коэффициент жесткости в 7 раз больше и зазор в 2 раза больше, чем в кинематической цепи соединения второго электропривода с общей массой.
На графических изображениях приняты следующие обозначения координат электроприводов: U1, I1, ω1 и M1 - напряжение, ток, угловая скорость электродвигателя и момент упругости кинематической передачи первого электропривода; U2, I2, ω2 и М2 - напряжение, ток, угловая скорость электродвигателя и момент упругости кинематической передачи второго электропривода; ω3, ω и Mc - заданное, действительное значения скорости и момент нагрузки общей массы, Мр - момент распора.
На фиг.1, 2, 3 электродвигатели 1, 2 первого и второго электроприводов связаны через соответствующие упругие кинематические передачи 3, 4, содержащие зазоры, с общей массой (общим рабочим органом) 5.
Силовая цепь электродвигателя 1 с датчиком 6 тока подключена к выходу силового преобразователя 7, напряжение которого измеряется датчиком 8 напряжения, а силовая цепь электродвигателя 2 со своим датчиком 9 тока соединена с выходом силового преобразователя 10, напряжение которого контролируется датчиком 11 напряжения.
Датчики 12, 13 скорости установлены на валах соответствующих электродвигателей 1, 2, а датчики 14, 15 момента - на соответствующих кинематических передачах 3, 4.
При этом элементы 1, 3, 7 составляют первый электропривод, а элементы 2, 4, 10 - второй электропривод.
Датчик скорости 16 установлен на валу общей массы 5.
Силовой преобразователь 7 первого электропривода подсоединен своим входом через сумматор 17 к катоду диода 18 и к выходу модального регулятора 19 момента, неинвертирующий вход которого связан с задатчиком 20 положительного момента распора, а соответствующие инвертирующие входы раздельно связаны с датчиком 8 напряжения, датчиком 6 тока, датчиком 12 скорости и датчиком 14 момента.
Силовой преобразователь 10 второго электропривода подключен своим входом через сумматор 21 к аноду диода 22 и к выходу модального регулятора 23 момента, неинвертирующий вход которого связан с задатчиком 24 отрицательного момента распора, а соответствующие инвертирующие входы раздельно связаны с датчиком 11 напряжения, датчиком 9 тока, датчиком 13 скорости и датчиком 15 момента.
При этом на катоде диода 18 и аноде диода 22 формируются основные управляющие воздействия для задания движущих моментов соответственно первому и второму электроприводам, а на выходах модальных регуляторов 19 и 23 - дополнительные управляющие воздействия соответственно первому и второму электроприводам.
На фиг.1 модальный регулятор 25 скорости подключен своим неинвертирующим входом к задатчику 26 скорости, одним из инвертирующих входов - к выходу датчика 16 скорости общей массы, а другими инвертирующими входами через посредство сумматоров 27, 28, 29 и 30 раздельно связан с выходами одноименных датчиков 8, 11 напряжения, датчиков 6, 9 тока, датчиков 12, 13 скорости и датчиков 14, 15 момента обоих электроприводов. Выход модального регулятора 25 скорости подключен к аноду диода 18 и катоду диода 22.
На фиг.2 модальный регулятор 25 скорости подключен своим неинвертирующим входом к задатчику 26 скорости, одним из инвертирующих входов - к выходу датчика 16 скорости общей массы, а другим инвертирующим входом через посредство сумматора 30 связан с выходами датчиков 14, 15 момента обеих кинематических передач. Выход модального регулятора 25 скорости подключен к аноду диода 18 и катоду диода 22. Дополнительный инвертирующий вход модального регулятора 19 момента соединен с выходом первого интегратора 31, своим входом связанного с выходом датчика 14 момента, а дополнительный инвертирующий вход модального регулятора 23 момента подключен к выходу второго интегратора 32, своим входом подключенного к выходу датчика 15 момента.
На фиг.3 задатчик 26 скорости подключен к входу первого модального регулятора 33 скорости и входу второго модального регулятора 34 скорости, у каждого из которых один из инвертирующих входов связан с выходом датчика 16 скорости общей массы. Остальные инвертирующие входы первого модального регулятора 33 скорости раздельно подключены к соответствующим выходам датчиков 8 напряжения, 6 тока, 12 скорости и 14 момента, а его выход соединен с анодом диода 18. Оставшиеся инвертирующие входы второго модального регулятора 34 скорости раздельно подключены к соответствующим выходам датчиков 11 напряжения, 9 тока, 13 скорости и 15 момента, а его выход соединен с катодом диода 22.
Все модальные регуляторы и сумматоры могут быть выполнены на базе суммирующих операционных усилителей или реализованы как усилители-сумматоры на элементах цифровой техники. В качестве задатчиков скорости и момента могут использоваться регулируемые источники напряжения, а в качестве интеграторов - операционные усилители в режиме интегрирования или блоки цифрового интегрирования. В качестве датчиков координат электроприводов и общей массы могут использоваться соответствующие измерительные устройства любого типа.
Представленная на фиг.1 система, реализующая первый вариант заявленного способа управления, работает следующим образом.
Параметры каждого из модальных регуляторов 19, 23 момента, формирующих дополнительные управляющие воздействия на первый и второй электроприводы, настраиваются так, чтобы обеспечить заданное распределение корней характеристического уравнения каждого электропривода, полученного при условии отсутствия движения общей массы. Это распределение корней должно обеспечить более быструю (в несколько раз) динамику процессов формирования моментов распора по сравнению с динамикой управления скоростью общей массы и при любом ее движении гарантировать надежную компенсацию влияния зазоров за счет стабилизации значений тормозных моментов на уровнях, определяемых задатчиками 20 и 24, несмотря на присутствие упругих звеньев в кинематических передачах.
Параметры общего модального регулятора 25 скорости рассчитываются так, чтобы обеспечить заданное распределение корней характеристического уравнения системы, состоящей из одного электропривода с присоединенной общей массой. Это распределение корней должно обеспечивать требуемую техническим заданием динамику управления движением рабочего органа со стороны движущего электропривода. После этого расчетные параметры, определяющие силу обратных связей по всем координатам состояния электропривода, корректируются с учетом параметров (коэффициентов усиления) обратных связей, уже введенных по этим координатам на входы модальных регуляторов момента. Для более точной коррекции параметров единого регулятора скорости темпы формирования дополнительных управляющих воздействий на электроприводы со стороны регуляторов момента должны задаваться одинаковыми. В итоге совокупное действие модальных регуляторов скорости и момента обеспечивает высокие показатели точности и быстродействия при управлении движением общей массы в соответствии с задаваемыми блоком 26 уровнями ее скорости, несмотря на присутствие зазоров и упругостей в кинематических передачах.
При изменениях блоком 26 заданного уровня или направления скорости общей массы, а также под воздействием внешних возмущений может изменяться знак выходного сигнала регулятора 25. При этом разделительные диоды 18, 22 формируют основное управляющее воздействие соответствующего знака только на тот электропривод, который в данный момент должен быть движущим. Сумматоры 27-30 обеспечивают одновременное поступление на входы модального регулятора 25 скорости сигналов обратных связей по координатам состояния обоих электроприводов, что исключает задержки времени при смене функций электроприводов (движущий-тормозящий) и при наличии разделительных диодов 18, 22, не допускающих одновременной работы электроприводов в движущем режиме, сохраняет высокие динамические показатели системы при реверсе.
При работе взаимосвязанных электроприводов во всех режимах, включая режим задания нулевой скорости общей массы, модальными регуляторами 19, 23 обеспечивается высокое качество стабилизации моментов распора, благодаря чему исключается раскрытие зазоров кинематических передач, повышается их износостойкость и надежность работы.
Приведенные на фиг.4 графики изменений координат электроприводов в различных переходных режимах подтверждают достижение технического результата в системе, реализующий первый вариант заявленного способа управления электроприводами с одинаковыми параметрами. Однако, как показывают графики на фиг.5, показатели качества управления в данной системе существенно ухудшаются при значительных различиях параметров первого и второго электроприводов, поскольку общий регулятор скорости может настраивается только на параметры одного из электроприводов. Кроме того, как показывают графики на фиг.4, в этой системе не удается исключить вариаций моментов распора при изменениях уровня скорости общей массы, что приводит к определенному повышению расхода электроэнергии при работе в верхней части скоростного диапазона.
Представленная на фиг.2 система, реализующая второй вариант заявленного способа управления, работает следующим образом.
Работа модальных регуляторов 19, 23 момента здесь строится аналогично первому варианту системы (фиг.1) с той разницей, что на дополнительный инвертирующий вход каждого регулятора подается интегральная составляющая момента упругости кинематической передачи соответственно первого и второго электроприводов, а при расчете параметров регуляторов темп формирования дополнительных управляющих воздействий задают более высоким. Как иллюстрируют графики на фиг.6, это позволяет исключить вариации моментов распора при изменениях скоростных режимов движения общей массы.
Работа модального регулятора 25 скорости здесь также осуществляется аналогично первому варианту системы (фиг.1). Отличие состоит в том, что здесь на него не заводятся обратные связи по суммам напряжений, токов и скоростей электродвигателей, а сохранение высоких показателей точности и быстродействия управления движением общей массы обеспечивается усилением обратных связей, вводимых по этим координатам электроприводов модальными регуляторами 19, 23 момента.
Кроме того, в данной системе удается компенсировать различия электромеханических параметров первого и второго электроприводов, благодаря независимой настройке их модальных регуляторов момента и общего модального регулятора скорости.
Достижение технического результата при управлении электроприводами с существенно различающимися параметрами иллюстрируют графики на фиг.6, однако необходимость обеспечения дополнительных форсировок при управлении моментами требует соответствующего повышения установленной мощности и стоимости электроприводов.
Представленная на фиг.3 система, реализующая третий вариант заявленного способа управления, работает следующим образом.
Формирование дополнительных управляющих воздействий на электроприводы модальными регуляторами 19, 23 момента осуществляется здесь аналогично тому, как это происходит в системе на фиг.1, реализующей первый вариант способа. Отличие состоит в том, что темпы формирования дополнительных управляющих воздействий могут быть неодинаковыми.
Другим отличием системы является то, что формирование основных управляющих воздействий осуществляется не одним, а двумя модальными регуляторами 33, 34 скорости. При этом на регулятор 33 поступают обратные связи по координатам состояния первого электропривода, а на регулятор 34 - обратные связи по координатам состояния второго электропривода. Расчетные параметры модальных регуляторов 33, 34 должны быть скорректированы с учетом параметров обратных связей, уже введенных соответствующими модальными регуляторами 19, 23 момента.
Сигналы заданной и действительной скоростей общей массы подаются на оба регулятора скорости, которые работают независимо, обеспечивая близкие темпы формирования основных управляющих воздействий, но разделительные диоды 18, 22 разрешают прохождение только положительных значений управления на первый и отрицательных значений - на второй электроприводы в соответствии с принятой логикой работы электромеханического торсиона (распора).
Такое решение позволяет обеспечить заданный темп и качество управления движением общей массы со стороны каждого электропривода, несмотря на различие их параметров, и, как свидетельствуют графики на фиг.7, достичь искомого технического результата. Тем не менее, реализовать астатическую стабилизацию моментов распора при изменениях скорости общей массы, как и в первом варианте системы (фиг.1), здесь не удается, что вызывает повышенный расход энергии при работе электроприводов.
Таким образом, каждый из предложенных вариантов заявленного способа обеспечивает достижение технического результата при определенных различиях дополнительных факторов, которые должны быть проанализированы и учтены перед окончательным выбором оптимального решения.
Источники информации
1. Авторское свидетельство СССР № 864477, кл. H 05 P 5/46, 1981.
2. Авторское свидетельство СССР № 1075360, кл. H 05 P 5/46, 1984.
3. Авторское свидетельство СССР № 1115191, кл. H 05 P 5/46, B 23 Q 15/00, 1984.
4. Башарин А.В., Новиков В.А., Соколовский Г.Г. Управление электроприводами. Л.: Энергоиздат, Ленинградское отделение, 1982, с.226-230.
5. Терехов В.М., Осипов О.И. Системы управления электроприводов. М.: Академия, 2005, с.252-254.
6. Авторское свидетельство СССР № 1767692, кл. H 02 P 7/68, 1992.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ регулирования координат взаимосвязанных электроприводов | 2017 |
|
RU2655723C1 |
| Способ управления многодвигательным электроприводом | 1990 |
|
SU1767692A1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 1992 |
|
RU2007836C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 2001 |
|
RU2185019C1 |
| Способ и устройство выборки люфта в кинематической передаче опорно-поворотного устройства с двумя взаимосвязанными электроприводами | 2019 |
|
RU2726951C1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ЗАЗОРОМ В КИНЕМАТИЧЕСКОЙ ПЕРЕДАЧЕ (ВАРИАНТЫ) | 2022 |
|
RU2783736C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ВЛИЯНИЯ МЕХАНИЧЕСКОГО ЗАЗОРА НА РАБОТУ СЛЕДЯЩЕГО ЭЛЕКТРОПРИВОДА | 2022 |
|
RU2784456C1 |
| МНОГОДВИГАТЕЛЬНЫЙ ЧАСТОТНО-РЕГУЛИРУЕМЫЙ ЭЛЕКТРОПРИВОД | 2006 |
|
RU2326488C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С УПРУГИМИ СВЯЗЯМИ | 2012 |
|
RU2513871C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ РЕЖУЩЕГО ИНСТРУМЕНТА ПРИ ОБРАБОТКЕ ДЕТАЛЕЙ НА СТАНКЕ | 2010 |
|
RU2432233C2 |


Изобретение относится к области электротехники и может быть использовано в опорно-поворотных устройствах различного назначения, металлообрабатывающих станках, механизмах металлургического производства и т.п. Способ управления заключается в формировании противоположных по знаку основных управляющих воздействий для задания движущих моментов электроприводов в зависимости от суммы значений одноименных координат полных векторов состояния электроприводов и от координат общей массы и формировании дополнительного управляющего воздействия на каждый электропривод в зависимости от полного вектора состояния этого электропривода, считая общую массу неподвижной. Темп формирования дополнительных управляющих воздействий задают единым и устанавливают выше темпа формирования основных управляющих воздействий. Для обеспечения астатической стабилизации тормозного момента электропривода дополнительное управляющее воздействие формируют в зависимости от значений координат полного вектора состояния этого электропривода и интегральной составляющей момента упругости его кинематической передачи. Основные управляющие воздействия формируют в зависимости от суммы значений моментов упругости кинематических передач и от координат общей массы. Темпы формирования дополнительных управляющих воздействий устанавливают выше темпа формирования основных управляющих воздействий. Для управления электроприводами с большим различием параметров основные управляющие воздействия формируют в зависимости от значений координат полного вектора состояния каждого электропривода и от координат общей массы. Технический результат заключается в повышении надежности работы электроприводов, точности и быстродействия управления движением общего рабочего органа по принципу электромеханического распора при наличии упругих элементов и зазоров в кинематических передачах от электродвигателей к общей массе. 3 н.п. ф-лы; 7 ил.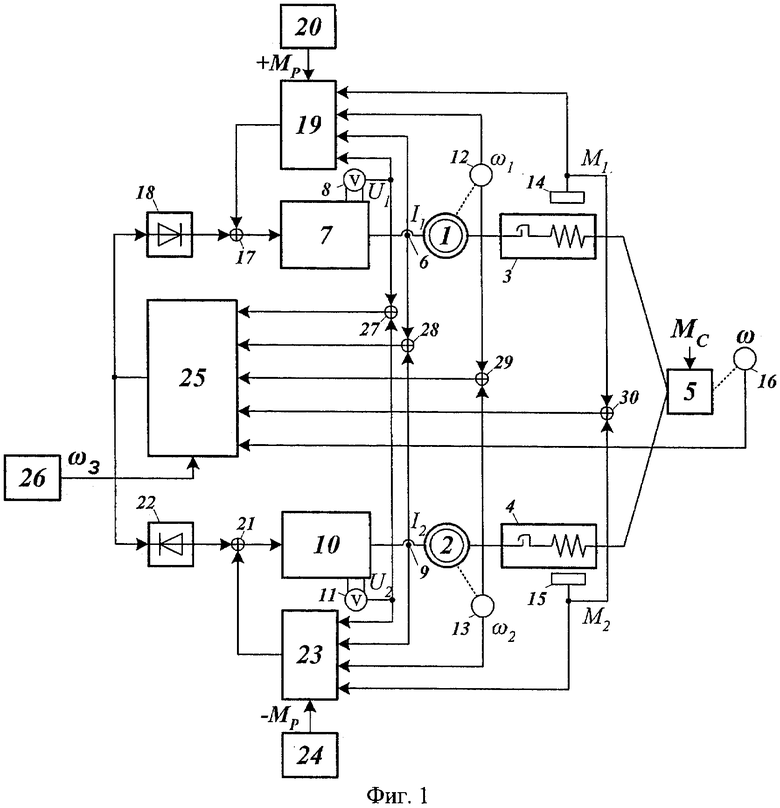
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 2001 |
|
RU2185019C1 |
| СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ | 1992 |
|
RU2007836C1 |
| Двухдвигательный электропривод постоянного тока | 1982 |
|
SU1075360A1 |
| Устройство для управления двухдвигательным электроприводом | 1988 |
|
SU1577054A1 |
| Способ управления многодвигательным электроприводом | 1990 |
|
SU1767692A1 |
| Соединительная муфта трубчатых лесов | 1982 |
|
SU1079940A1 |
| US 5708332 A, 13.01.1998 | |||
| DE 3935712 A1, 03.05.1990 | |||
| Способ изготовления бетона | 1948 |
|
SU76359A1 |

