1
Изобретение относится к машиностроению, а именно к манипуляторе- строению, и может быть использовано Для аттестации геометрических параметров механических рук промьшленных роботов, управляемых от вычислительных машин.
Целью изобретения является повышение точности позиционирования рабочего органа при аналитическом программировании за счет учета реальных геометрических параметров механической руки робота после его сборки.
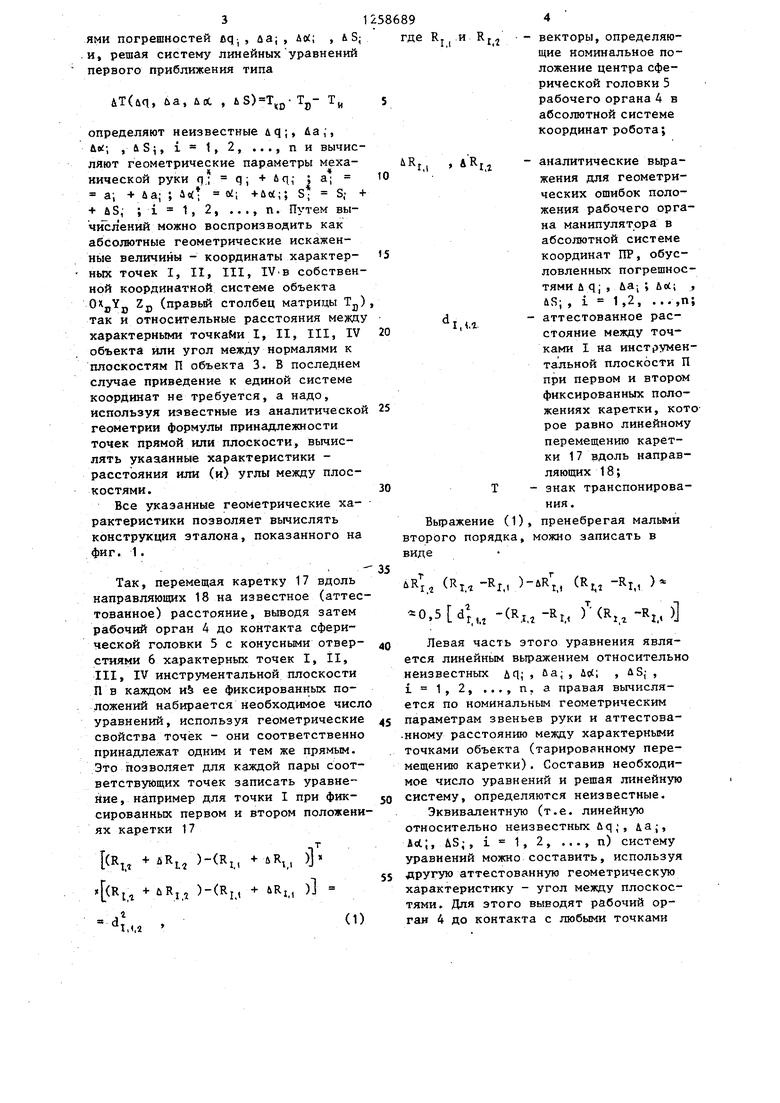
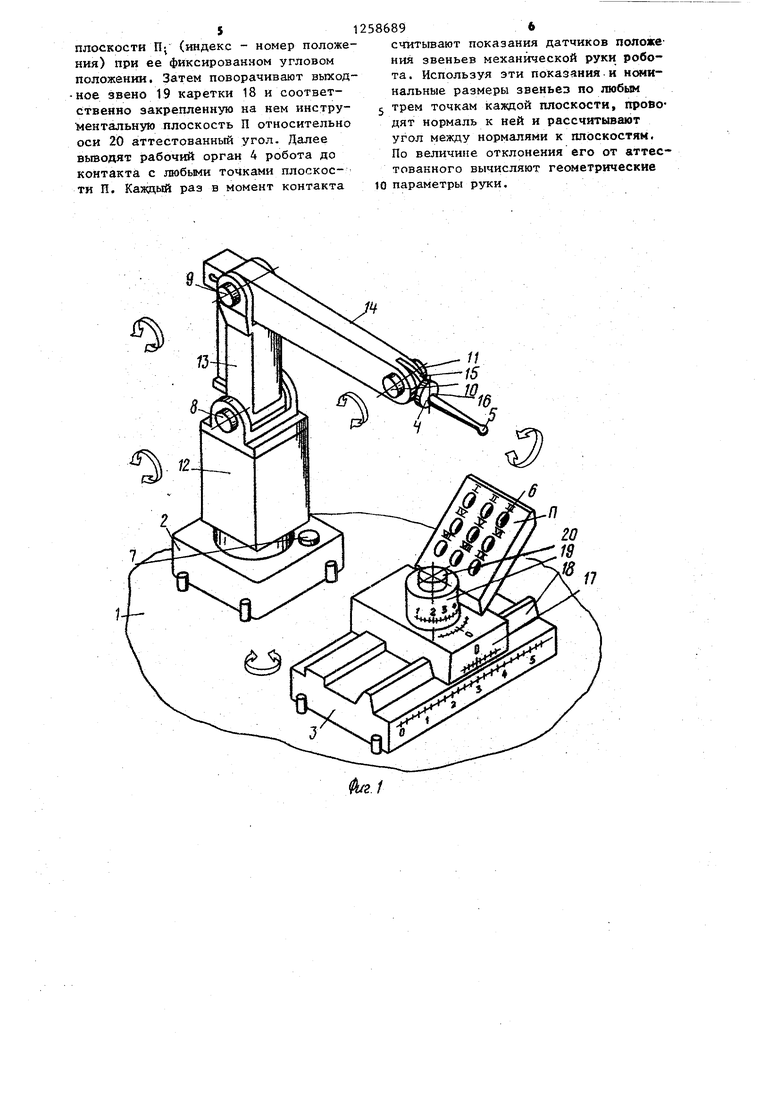
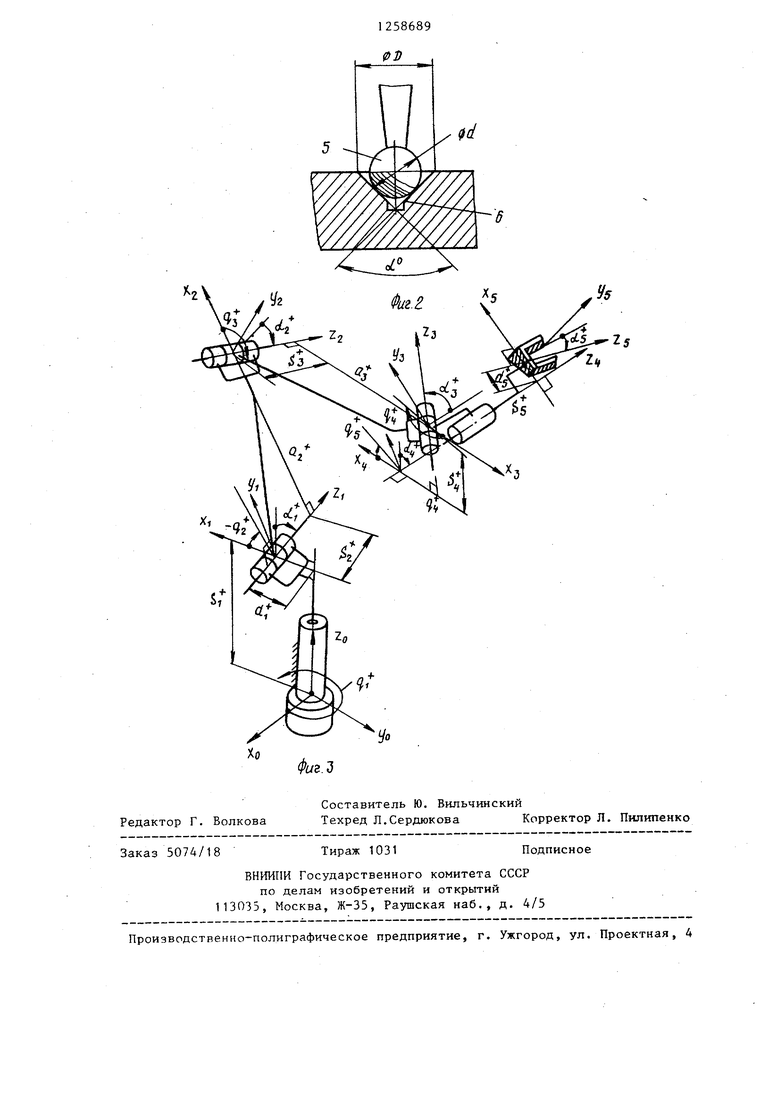
На фиг. 1 представлена общая схем проведения аттестации геометрических параметров механической руки и вариант конструктивного выполнения эта-- лонного объекта; на фиг. 2 - сечение инструментальной плоскости по оси конусного центрового отверстия в Момент контакта со сферическим наконечником измерительной головки; на фиг.3 кинематическая схема механической руки и ее геометрические параметры, необходимые для реализации алгоритма обработки экспериментальной информации ,
Аттестацию механической руки про- мьшшенного робота проводят следующим образом.
На стенде 1 закрепляют манипулятор 2. В его рабочей зоне устанавливают эталонный объект 3 с известными геометрическими характеристиками, Вьгаодят рабочий орган 4 со сферической головкой 5 до контакта с конусными отверстиями 6 характерных точек I, II, III, IV или плоскостями П объекта, фиксируют по показаниям датчиков 7-11 относительное положение звеньев руки. По этим показаниям и номинальным геометрическим параметрам руки (длинам звеньев 12-16) робота путем вычислений определяют пространственное положение рабочего органа, соответствующее относительным координатам звеньев руки при ее контакте с характерными точками эталонного объекта.
Общий алгоритм вычислений заключается в следующем.
По известному соотношению определяют положение и ориентацию ,рабо- чего органа в абсолютной системе координат, связанной с основанием робота
Т А Д . Л п h ;
)5
586892
где А;- 4x4 - матрица, характеризующая положение и ориентацию i-й системы координат, свя5занной с звеном
(фиг. 2), в (1-1)-Й система координат; Т - 4x4 - матрица, определяющая декартовы коор- динаты центра и
направляющие косинусы системы Координат, связанной с п-м звеном руки, в данном случае с контрольным инструментом - рабочим органом.
Каждую из матриц Aj концентрируют четыре параметра: обобщенная коорди- 20 ната q; и постоянные параметры , о(;, S;, определяющие конструкцию - геометрию i-ro звена (фиг. 3).
Положение и ориентация рабочего органа ПР определяются преобразова- 25 нием Т, рассчитанным по номинальным параметрам q;, а; , и; , S;, , i 1,2, ..., п, которые отличаются от фактических q , а , о , S на некоторые величины fcq;, &а;,гю(; , 30 Д3{, обусловленные погрешностями изготовления звеньев и сборки манипулятора, а также ошибками установки нулей датчиков оборотных связей по положению в исходных конфигурациях- 35 звеньев механической руки.
С другой стороны, можно с достаточной точностью определить с помощью измерений фактическое расположение, определяемое преобразова- 40 нием Т-р Рабочего органа ПР относительно эталонного объекта, установленного в рабочей зоне робота. Приводя к единой системе координат, с помощью линейного преобразования 45 определяют разность абсолютных координат пространственных положений рабочего органа, определенных при контакте с эталонным объектом и полученных по результатам вычислений
50
ТО
,Ь - ТпПо этой разности, набрав необходимое число уравнений (больше или 52 равное числу неизвестных), имея аналитическое выражение для преобразования U T(uq , аа , ioi , А S) , элементы которого являются функциями погрешностей fiq- , аа; , Ло(; , & S; и, решая систему линейных уравнений первого приближения типа
&Т(йП, йа, лл , ь8) Tj,- Т„
определяют неизвестные ЛЦ;, Ла,, йы; ,48, i 1, 2, ..., п и вычисляют геометрические параметры механической руки q; q; + uq; ; а; а; + йа; ; od; +uoC;; S S; + + uS,- ;i 1,2, ...,n. Путем вы- числ ений можно воспроизводить как абсо;нотные геометрические искаженные величины - координаты характер- ных точек I, II, III, IV в собственной координатной системе объекта OXjjYjj Zjj (правый столбец матрицы Т) так и относительные расстояния между характерными точками I, II, III, IV объекта или угол между нормалями к плоскостям п объекта 3. В последнем случае приведение к единой системе координат не требуется, а надо, Используя известные из аналитической геометрии формулы принадлежности точек прямой или плоскости, вычислять указанные характеристики - расстояния или (и) углы между плоскостями.
Все указанные геометрические характеристики позволяет вычислять конструкция эталона, показанного на фиг. 1.
Так, перемещая каретку 17 вдоль
направляющих 18 на известное (аттестованное) расстояние, выводя затем рабочий орган 4 до контакта сферической головки 5 с конусными отвер- стиями 6 характерных точек I, II, III, IV инструментальной плоскости П в каждом и5 ее фиксированных положений набирается необходимое число уравнений, используя геометрические свойства точек - они соответственно принадлежат одним и тем же прямым. Это позволяет для каждой пары соответствующих точек записать уравне- йие, например для точки I при фик- сированных первом и втором положениях каретки 17
K.t 17 b(Ri,, -ь uR,, ) (Rj + .хд )1И ,1 1
4,(,i
(1)
Rj и RI,J
- векторы, определяющие номинальное положение центра сферической головки 5 рабочего органа 4 в абсолютной системе координат робота;
О 5 20 25 30
5
о 5 g
5
iR
t,i
1Л
l,.г.
-аналитические жения для геометрических ошибок положения рабочего органа манипулятора в абсолютной системе координат ПР, обусловленных погрешностями U q; , Ла; ; uot; , ЛЯ;, i 1,2, ...,п;
-аттестованное расстояние между точками I на инструментальной плоскости П при первом и втором фиксированных положениях каретки, кото рое равно линейному перемещению каретки 17 вдоль направляющих 18;
Т - знак транспонирования.
Вьфажение (1), пренебрегая мальми второго порядка, можно записать в виде
, (RI,, -RJ,, ,, (R:,, -RI,, ) o,,, -(RI,,-RI, V(R,, -RI, )
Левая часть этого уравнения является линейным выражением относительно неизвестных iq; , йа; , Дс(; , uS , i 1, 2, ..., п. а правая вычисляется по номинальным геометрическим параметрам звеньев руки и аттестова- -нному расстоянию между характерными точками объекта (тарированному перемещению каретки). Составив необходимое число уравнений и решая линейную систему, определяются неизвестные.
Эквивалентную (т.е. линейную относительно неизвестных uq;, ia;, 4«t;, iiS;, i 1, 2, ..., n) систему уравнений можно составить, используя другую аттестованную геометрическую характеристику - угол между плоскостями. Для этого выводят рабочий орган 4 до контакта с любыми точками
плоскости П (индекс - номер положе ния) при ее фиксированном угловом положении. Затем поворачивают выход нее звено 19 каретки 18 и соответственно закрепленную на нем инстру- ментальную плоскость П относительно оси 20 аттестованный угол. Далее выводят рабочий орган 4 робота до контакта с любыми точками плоскости П. Каждый раз в момент контакта
2586896
считьгеают показания датчиков положения звеньев механической руки робота. Используя эти показания и номинальные размеры звеньеэ по любым 5 трем точкам каждой плоскости, проводят нормаль к ней и рассчитывают угол между нормалями к плоскостям, По величине отклонения его от аттестованного вычисляют геометрические 10 параметры руки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система и способ калибровки кинематических параметров роботизированного манипулятора | 2022 |
|
RU2810082C1 |
| Стенд для испытания промышленных роботов-манипуляторов | 1987 |
|
SU1495114A1 |
| СПОСОБ КОНТРОЛЯ ТОЧНОСТИ КОНТУРНЫХ ПЕРЕМЕЩЕНИЙ ПРОМЫШЛЕННЫХ РОБОТОВ | 2011 |
|
RU2466858C1 |
| Способ и система для определения по меньшей мере одного свойства манипулятора | 2014 |
|
RU2672654C2 |
| Способ калибровки кинематических параметров многостепенных манипуляторов | 2019 |
|
RU2719207C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ НАКОНЕЧНИКА ИЗМЕРИТЕЛЬНОЙ ГОЛОВКИ РОБОТА | 1990 |
|
RU2009882C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ АВТОМАТИЧЕСКИМ ТРАНСПОРТНО-ПОГРУЗОЧНЫМ МАНИПУЛЯТОРОМ | 1990 |
|
RU2009883C1 |
| СПОСОБ И СИСТЕМА КАЛИБРОВКИ КАМЕРЫ | 2012 |
|
RU2601421C2 |
| СПОСОБ НАВЕДЕНИЯ МАШИНЫ НА ОБЪЕКТ | 2012 |
|
RU2522525C2 |
| СПОСОБ ВЫГРУЗКИ ШТУЧНЫХ ГРУЗОВ ИЗ КОНТЕЙНЕРА | 2010 |
|
RU2441830C1 |
/7
Z
td
Редактор Г. Волкова
Составитель Ю. Вильчинский
Техред Л.Сердюкова Корректор Л. Пилипенко
Заказ 5074/18
Тираж 1031
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Подписное
| Кобринский А.Е., Саламандра Б.Л,, Серков Н.А | |||
| и Степанцев Б.М | |||
| Измерительные машины с ЧПУ в адаптивных системах управления станками | |||
| - Станки и инструмент, 1974, № 8, с | |||
| Пишущая машина | 1922 |
|
SU37A1 |
