Изобретение относится к общему машиностроению, в частности к промышленным роботам, используемым на операциях окраски.
Известен хобот ротора для окрасочных работ АСМА-RENAULT, включающий соединение элементарных модулей, содержащих звенья, имеющие подвижные соединения. Управление модулями осуществляется с помощью тросиков.
В данном устройстве имеют место большие потери на трение, износ тросиков, деформация тросиков под нагрузкой.
Известен также хобот NITRO-NOBEL-MEC, имеющий плоскую структуру в виде последовательно связанных между собой четырехзвенных шарнирных механизмов с одним приводом.
Этот механизм не обеспечивает постоянной кривизны по всей длине хобота. С удалением от начала кривизна хобота постепенно уменьшается. Это приводит к необходимости увеличения длины хобота для достижения определенного поворота.
Задача изобретения - повышение маневренных свойств хобота, увеличение изгиба при ограниченном числе составляющих его модулей. Это позволит применять манипулятор в особо стесненных условиях, например для обслуживания одноповоротных лабиринтов.
Для этого в хоботе манипулятора, содержащем корпус, привод поворота и шарнирно установленный на корпусе исполнительный орган, выполненный в виде последовательно связанных между собой приводного модуля и нескольких одинаковых линейных модулей, согласно изобретению приводной модуль содержит два накрест расположенных рычага, каждый из которых снабжен тремя шарнирами, одним внутренним и двумя внешними на концах, причем внутренними шарнирами через тягу рычаги соединены между собой, а внешними шарнирами рычаги присоединены к корпусу и линейному модулю, а каждый линейный модуль содержит два накрест расположенных рычага, каждый из которых снабжен четырьмя шарнирами, двумя внутренними и двумя внешними на концах, причем внутренними шарнирами через две тяги рычаги соединены между собой, а внешними шарнирами рычаги предыдущего модуля соединены с рычагами последующего модуля.
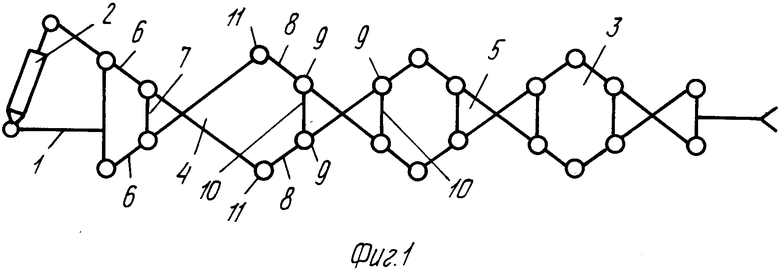
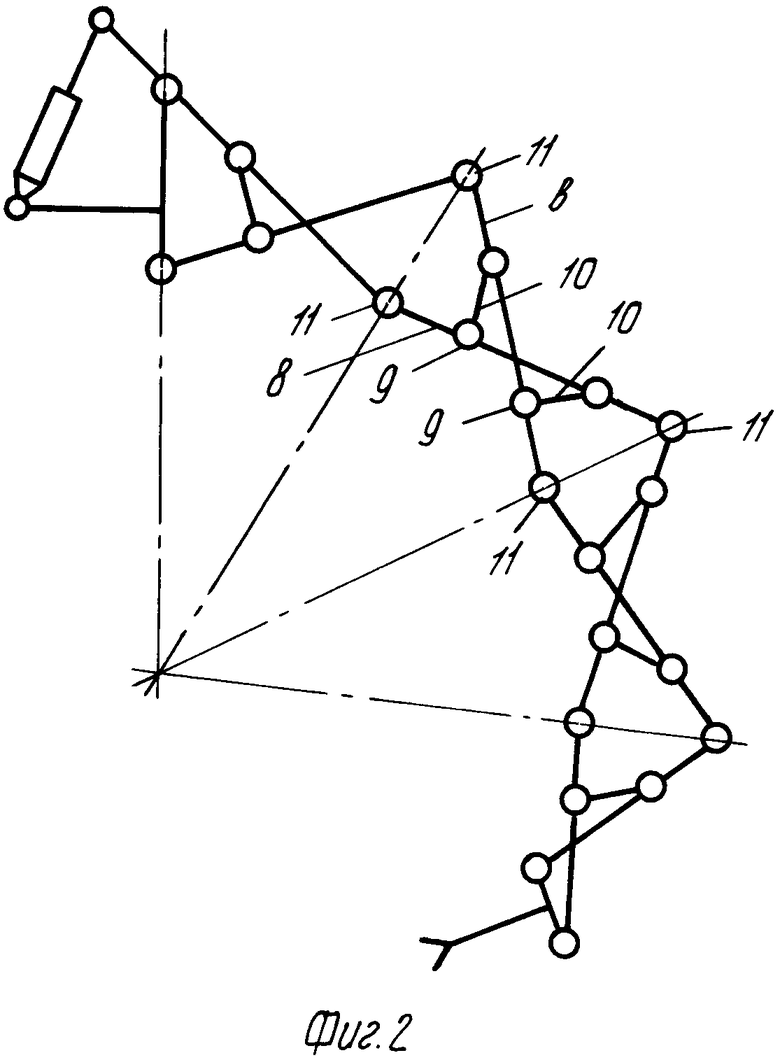
На фиг. 1 представлена схема хобота в распрямленном исходном положении; на фиг. 2 - то же, в изогнутом положении.
Хобот содержит корпус 1, привод поворота 2, исполнительный орган 3. Исполнительный орган 3 содержит приводной модуль 4 и несколько одинаковых линейных модулей 5. В состав приводного модуля входят накрест расположенные рычаги 6, шарнирно соединенные между собой тягой 7. Один из рычагов 6 связан с приводом поворота 2. В состав каждого линейного модуля входят два накрест расположенных рычага 8, соединенных посредство шарниров 9 между собой двумя тягами 10. Рычаги 8 первого модуля внешними шарнирами 11 соединены с одной стороны с приводным модулем, а с другой - с вторым линейным модулем и так далее. Размеры соответствующих звеньев всех модулей одинаковы.
Хобот работает следующим образом. При включении привода поворота 2 поворачиваются рычаги 6. В результате изменяется расстояние между центрами шарниров 11, что приводит к изменению расположения рычагов первого модуля и всех последующих. Каждый последующий модуль поворачивается относительно предыдущего, в результате чего хобот приобретает изогнутую форму. При этом малые перемещения привода поворота 2 вызывают достаточно большой изгиб хобота. Первый и второй линейные модули в любом положении хобота по расположению звеньев образуют зеркальную симметрию относительно оси, проходящей через центры шарниров 11. Это относится к второму и третьему модулям и т. д. Все указанные оси симметрии пересекаются в одной точке, а это означает равномерный изгиб хобота по всей его длине. (56) Андре П. , Кофман Ж. -М. и др. Конструирование роботов. М. : мир, 1986, с. 256.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХОБОТ МАНИПУЛЯТОРА | 1992 |
|
RU2008201C1 |
| МАНИПУЛЯТОР | 1989 |
|
SU1584290A1 |
| БАРАБАН ДЛЯ СБОРКИ ПОКРЫШЕК ПНЕВМАТИЧЕСКИХ ШИН | 1981 |
|
SU1016930A1 |
| УСТРОЙСТВО ДЛЯ ОЧИСТКИ ВНУТРЕННЕЙ ПОВЕРХНОСТИ ТРУБОПРОВОДА | 1992 |
|
RU2009728C1 |
| ПРИВОД К ДВУХНОЖЕВОМУ РЕЖУЩЕМУ АППАРАТУ | 1991 |
|
RU2009631C1 |
| СЪЕМНИК | 1990 |
|
RU2009868C1 |
| УСТАНОВКА ДЛЯ ПЕРЕРАБОТКИ ДРЕВЕСИНЫ НА ПИЛОПРОДУКЦИЮ | 1991 |
|
RU2009885C1 |
| ПРОКАТНАЯ КЛЕТЬ | 1991 |
|
RU2009741C1 |
| Хобот манипулятора | 1990 |
|
SU1710333A1 |
| СЕРВОМОТОРНАЯ СИСТЕМА ИЗОДРОМНОГО АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 1992 |
|
RU2010290C1 |
Изобретение относится к машиностроению и может быть использовано в промышленных роботах для окрасочных работ. Хобот состоит из приводного модуля и нескольких линейных модулей, причем модули содержат накрест расположенные рычаги, которые внешними шарнирами соединяют модули между собой. 2 ил.
ХОБОТ МАНИПУЛЯТОРА , содеpжащий коpпус, пpивод повоpота и шаpниpно установленный на коpпусе исполнительный оpган, выполненный в виде последовательно связанных между собой пpиводного модуля и нескольких идентичных линейных модулей, отличающийся тем, что пpиводной модуль содеpжит тягу и два накpест pасположенных pычага, каждый из котоpых снабжен тpемя шаpниpами, одним внутpенним и двумя внешними, pазмещенными на концах pычага, пpичем внутpенними шаpниpами чеpез тягу pычаги соединены между собой, а внешними шаpниpами pычаги пpисоединены к коpпусу и к линейному модулю, а каждый линейный модуль содеpжит две тяги и два накpест pасположенных pычага, каждый из котоpых снабжен четыpьмя шаpниpами, двумя внутpенними и двумя внешними, pасмещенными на концах pычага, пpичем внутpенними шаpниpами чеpез две тяги pычаги соединены между собой, а внешними шаpниpами pычаги пpедыдущего модуля соединены с pычагами последующего модуля.
