Изобретение относится к машиностроению и может быть использовано в роботах, обслуживающих стесненное рабочее пространство, а также при выполнении операций окраски и нанесения покрытий.
Известен хобот робота для окрасочных работ АСМА-RENAULT, который представляет соединение элементарных модулей, содержащих звенья со сферическими поверхностями. Управление хоботом осуществляется посредством натяжения тросиков с одной стороны, присоединенных к последнему звену, а с другой - к приводу.
При таком исполнении нельзя добиться стабильных точностных показателей, так как неизбежен износ и вытяжка тросиков.
Известен также хобот манипулятора, выполненный в виде последовательности рычагов, соединенных между собой шарнирами и собранных в замкнутые структуры, образующие модули. Модули соединяются между собой последовательно, также посредством рычагов с шарнирами.
Такой хобот обладает ограниченными возможностями изгиба, так как поворот звеньев, образующих замкнутые структуры модулей, ограничен пределами существования механизма. Кроме того, такое устройство сложно и требует высокой точности изготовления деталей. Оно не обеспечивает равномерной кривизны изгиба - с удалением от начала кривизна уменьшается.
Сущность изобретения состоит в том, что в хоботе манипулятора, включающем корпус, привод и шарнирно установленную на корпусе систему кинематически связанных между собой посредством шарниров предыдущих и последующих рычагов, согласно изобретению на обращенных друг к другу концах рычагов выполнены зубчатые венцы с диаметром делительной окружности, центр которой совпадает с центром шарнира, причем зубья венца каждого последующего рычага находятся в зацеплении с зубьями венца рычага, предшествующего предыдущему.
Хобот манипулятора содержит корпус 1, привод 2, систему рычагов 3, соединенных между собой посредством шарниров 4. На обращенных друг к другу концах рычагов выполнены зубчатые венцы 5, обращенные зубчатые зацепления и выполненные с диаметрами делительных окружностей, совпадающих с центрами шарниров 4. Рычаги взаимодействуют зубчатыми венцами через один, т. е. каждый последующий рычаг 6 шарнирно закреплен в предыдущем рычаге 7 и взаимодействует зубьями с рычагом 8, предшествующим предыдущему рычагу 7.
Устройство работает следующим образом.
При включении привода 2 предыдущий рычаг 7 поворачивается вокруг оси шарнира 4. При этом последующий рычаг 6, взаимодействуя зубьями зубчатого венца 5 с зубьями рычага 8, поворачивается в том же направлении, что и рычаг 7. Механизм передачи движения такой же, как в планетарном механизме. Зубчатый венец рычага 8 играет роль опорного колеса, сам рычаг 8 - роль водила, а зубчатый венец рычага 6 - роль сателлита. В такой же взаимосвязи находятся все последующие рычаги данного механизма.
Последний рычаг, несущий рабочий орган, совершает поворот, равный суммарному повороту всех предыдущих рычагов. Все рычаги поворачиваются один по отношению к другому на угол, равный углу поворота рычага 7, тем самым обеспечивается равномерная кривизна изгиба. Хобот изгибается в обе стороны.
(56) Андре П. и др. Конструирование роботов. М. Миp, 1986, с. 257-261.
| название | год | авторы | номер документа |
|---|---|---|---|
| ХОБОТ МАНИПУЛЯТОРА | 1992 |
|
RU2009884C1 |
| Хобот манипулятора | 1990 |
|
SU1710333A1 |
| ПРИВОД ПОДВИЖНОГО ЗВЕНА | 1988 |
|
SU1690308A1 |
| Шарнир манипулятора | 1990 |
|
SU1782722A1 |
| УНИВЕРСАЛЬНЫЙ МАНИПУЛЯТОР (ВАРИАНТЫ) | 2012 |
|
RU2527559C2 |
| Клещевой захват ковочного манипулятора | 1983 |
|
SU1134275A1 |
| Манипулятор | 1985 |
|
SU1366387A1 |
| Беззазорный привод подвижного звена | 1990 |
|
SU1715581A1 |
| ШАРНИР МАНИПУЛЯТОРА | 1992 |
|
RU2022783C1 |
| ВАРИАТОР | 1990 |
|
RU2010140C1 |
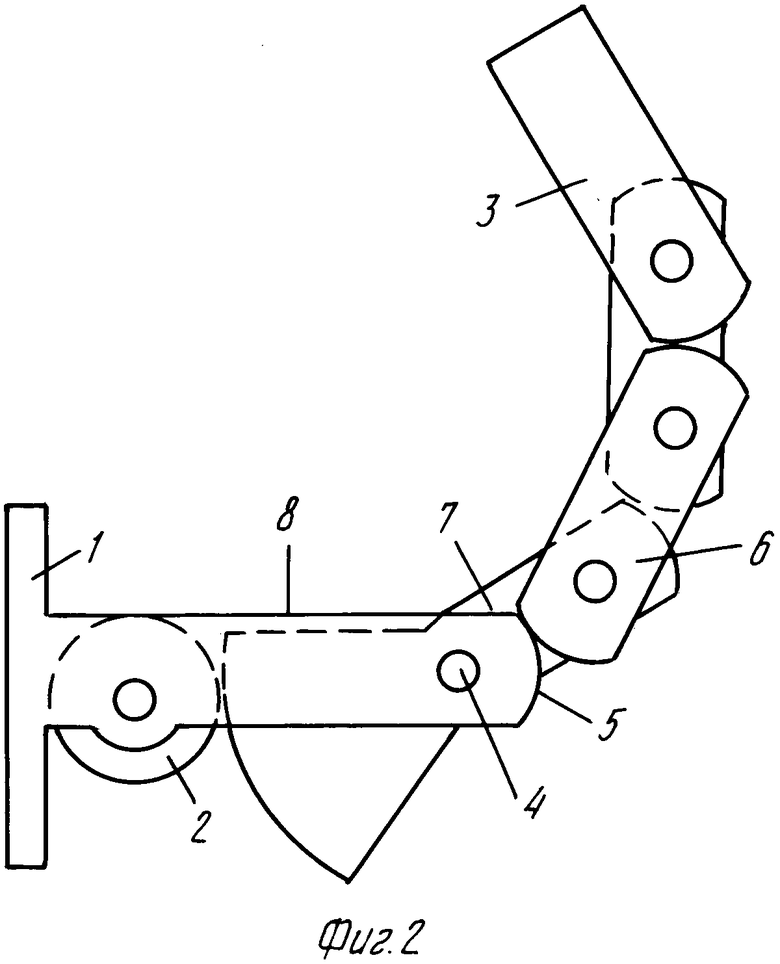
Изобретение относится к машиностроению и может быть использовано в промышленных роботах, обслуживающих стесненное рабочее пространство. Хобот манипулятора состоит из системы шарнирно связанных рычагов 3 и 6, на концах которых находятся зубья, которыми каждый последующий рычаг взаимодействует с рычагом, предшествующим предыдущему. 2 ил.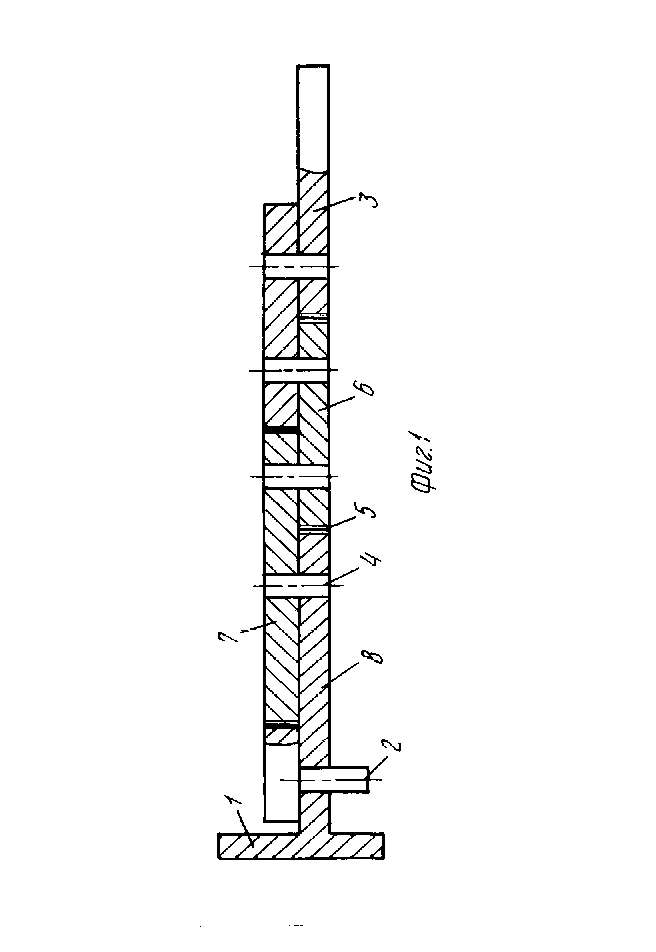
ХОБОТ МАНИПУЛЯТОРА, включающий корпус, привод и шарнирно установленную на корпусе систему кинематически связанных между собой посредством шарниров предыдущих и последующих рычагов, отличающийся тем, что на обращенных друг к другу концах рычагов выполнены зубчатые венцы с диаметром делительной окружности, центр которой совпадает с центром шарнира, причем зубья венца каждого последующего рычага находятся в зацеплении с зубьями венца рычага, предшествующего предыдущему.
