Изобретение относится к машиностроению и предназначено для механизации и автоматизации операций в технологических камерах, например при выполнении дробеструйных или окрасочных операций.
Целью изобретения является повышение производительности за счет сокращения времени позиционирования держателя рабочего инструмента при одновременном повышении качества выполняемых операций за счет повышения маневренности держателя.
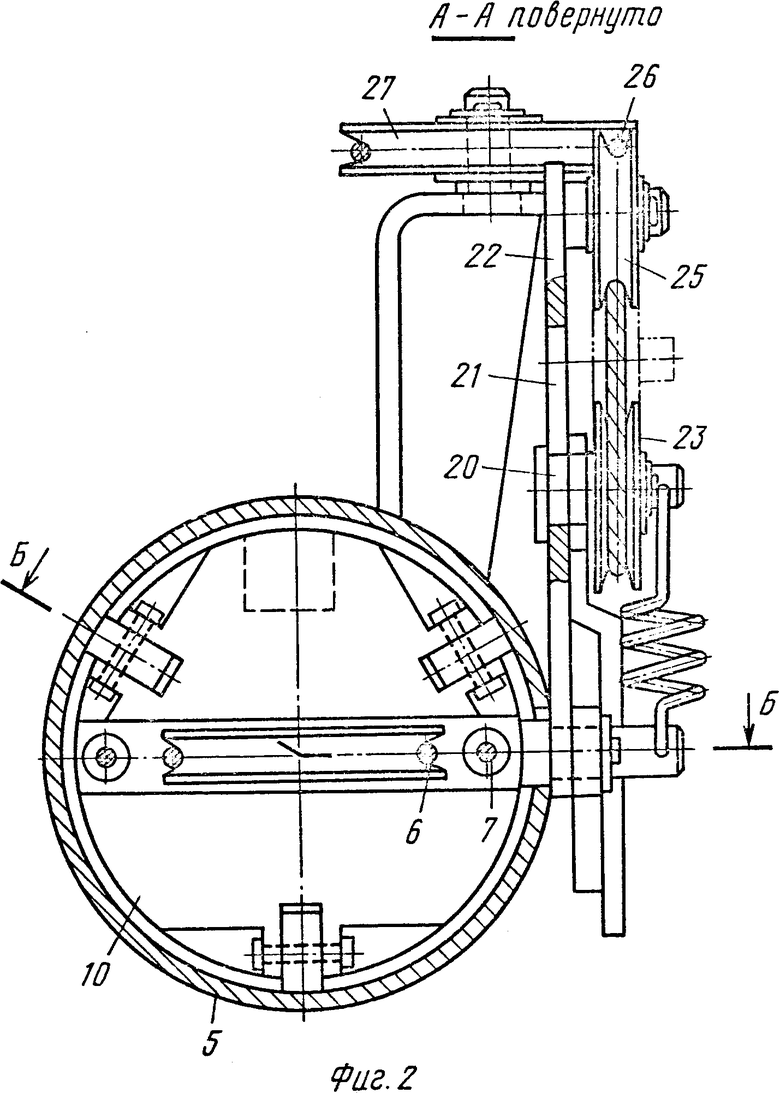
На фиг. 1 изображен предлагаемый манипулятор; на фиг. 2 - разрез А-А на фиг; 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - кинематическая схема манипулятора.
Манипулятор состоит из основания 1 с верхними и нижними направляющими 2 и 3 для основной каретки 4 с вертикальной трубчатой направляющей 5, в которой посредством индивидуальных трособлочных систем 6 и 7, связанных с приводами 8 и 9, установлены одна над другой две каретки 10 и 11, в свою очередь, шарнирно связанные через продольную щель 12 в направляющей 5 с концами ведущих рычагов 13 и 14 шарнирно-рычажного механизма с рычагами 15 и 16, на общей оси которых закреплен рычаг 17 держателя. На одном конце рычага 17 крепят держатель рабочего инструмента (сопло дробеструйного аппарата, форсунку), а другой тягами 18 и 19 связан с ползуном 20, установленным в горизонтальном пазу 21 пластины 22, закрепленной на каретке 10. Ползун 20 подпружинен пружиной растяжения и имеет натяжной ролик 23. На пластине 22 над и под пазом 21 со смещением относительно ролика 23 шарнирно закреплены отклоняющие ролики 24 и 25. Ролик 23 охвачен гибким тросом 26, огибающим отклоняющие ролики 24, 25 и закрепленные на концах вертикальной трубчатой направляющей 5 ролики 27 и 28, а также ролики 29, 30, 31. Один конец гибкого троса 26 закреплен на основании 1, а другой прикреплен к приводному барабану 32, установленному на основании 1. Основная каретка 4 трособлочной системой 33 связана с приводом 34. Манипулятор встраивается в технологическую камеру, при этом все приводы вынесены за ее пределы.
Манипулятор работает следующим образом.
При включении привода 34 основная каретка 4 посредством трособлочной системы 33 перемещается в направляющих 2 и 3. При включении приводов 8 и 9 каретки 10 и 11 посредством трособлочных систем 6 и 7 соответственно перемещаются в направляющей 5. При включении привода одной из кареток либо при работе приводов с разными скоростями или в противоположных направлениях изменяется взаимное расположение рычагов 13 и 14, и рычаг 17 вместе с держателем рабочего инструмента приближается или удаляется от направляющей 5. Это обеспечивает движение механической руки по трем координатам. Независимо от режима работы приводов 34, 8 и 9 при включении приводного барабана 32 и намотке на него гибкого троса 26 преодолевается усилие пружины, ролик 23 подтягивается к роликам 24, 25, а перемещение ползуна 20 в пазу 21 передается рычагу 17 тягами 19 и 18, причем рычаг 17 вместе с держателем рабочего инструмента поворачивается на определенный угол. При включении барабана 32 в обратном направлении пружина перемещает рычаг 17 в исходное положение и выбирает образовавшуюся слабину гибкого троса 26.
Манипулятор позволяет изменять угол наклона рабочего инструмента при одновременном перемещении последнего в пространстве. Кроме того, он проще по конструкции и менее материалоемок и, следовательно, дешевле в изготовлении. При использовании манипулятор позволяет повысить производительность и качество обслуживаемых технологических операций. (56) Авторское свидетельство СССР N 1458152, кл. В 25 H 9/00, 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР | 1988 |
|
SU1487338A1 |
| УСТРОЙСТВО ДЛЯ СБОРА И ВЫГРУЗКИ МУСОРА С ИСПОЛЬЗОВАНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 1991 |
|
RU2009971C1 |
| УСТАНОВКА ДЛЯ ПЕРЕРАБОТКИ ДРЕВЕСИНЫ НА ПИЛОПРОДУКЦИЮ | 1991 |
|
RU2009885C1 |
| ТРАНСПОРТНО-ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО И ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ К НЕМУ | 1991 |
|
RU2009968C1 |
| УСТРОЙСТВО ДЛЯ НАКОПЛЕНИЯ МЕРНЫХ ОТРЕЗКОВ ТЕКСТИЛЬНЫХ ПОЛОТЕН | 1991 |
|
RU2009973C1 |
| БУРОРЫХЛИТЕЛЬНОЕ УСТРОЙСТВО | 1991 |
|
RU2009993C1 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА И ПОДЪЕМА ПЛАВАЮЩИХ ОБЪЕКТОВ | 1991 |
|
RU2009979C1 |
| ВАРИАТОР | 1990 |
|
RU2010140C1 |
| СТАНОК ДЛЯ НАМОТКИ ИЗДЕЛИЙ ТИПА БАЛЛОНОВ | 1986 |
|
SU1383697A1 |
| ПЕРЕГРУЖАТЕЛЬ | 1991 |
|
RU2009969C1 |


Изобретение относится к машиностроению и предназначено для механизации и автоматизации операций в технологических камерах, например при выполнении дробеструйных или окрасочных операций. Целью изобретения является повышение производительности за счет сокращения времени позиционирования держателя рабочего инструмента при одновременном повышении качества выполняемых операций за счет повышения маневренности держателя. Основная каретка 4 позиционируется в заданном положении посредством индивидуального привода и трособлочной системы. При относительном перемещении кареток, расположенных в направляющей 5, происходит "складывание" механической руки пантографного типа и соответственно держатель рабочего инструмента либо приближается, либо удаляется от направляющей 5. При наматывании троса 26 на барабан привода натяжной ролик 23 перемещается вместе с пружиной в продольном пазу 21 пластины 22. При этом перемещаются тяги 19, 18 и поворачивается двуплечий рычаг с держателем рабочего инструмента. 4 ил.
МАНИПУЛЯТОР , содеpжащий основание, с котоpым шаpниpно связана основная каpетка, несущая веpтикальную тpубчатую напpавляющую, имеющую пpодольную щель, а внутpи тpубчатой напpавляющей установлены одна над дpугой две пpиводные каpетки, шаpниpно связанные с ведущими pычагами механической pуки, выполненной в виде шаpниpно-pычажного пантогpафа, пpичем пpиводы пеpемещения всех каpеток жестко установлены на основании и связаны с соответствующими каpетками посpедством тpособлочных систем, а деpжатель pабочего инстpумента закpеплен на одном из плеч двуплечего pычага, подвижно установленного в шаpниpе ведомого звена пантогpафа и связанного посpедством гибких тяг с тpосом одной из тpособлочных систем, котоpый установлен с помощью натяжного механизма на веpтикальной тpубчатой напpавляющей и кинематически связан с пpиводом качания двуплечего pычага, отличающийся тем, что, с целью повышения пpоизводительности за счет сокpащения вpемени позициониpования деpжателя pабочего инстpумента пpи одновpеменном повышении качества выполняемых опеpаций за счет повышения маневpенности деpжателя, натяжной механизм выполнен в виде ползуна, на котоpом шаpниpно закpеплен конец гибкой тяги двуплечего pычага, пластины с пpодольным пазом, котоpая жестко связана с веpхней каpеткой, а в ее пpодольном пазу установлен ползун, подпpужиненный относительно пластины, а также в виде одного натяжного pолика, шаpниpно связанного с ползуном, и двух отклоняющих pоликов, котоpые шаpниpно связаны с пластиной, пpи этом центpы pоликов pасположены в углах pавностоpоннего тpеугольника, обpазованного осями симметpии каждой паpы pоликов, пpоходящими чеpез их центpы, пpичем центp натяжного pолика pасположен в веpшине pавностоpоннего тpеугольника, котоpая обpащена к тpубчатой напpавляющей, а концы тpоса жестко связаны соответственно с пpиводом качания двуплечего pычага и с основанием.
