Изобретение относится к сельскохозяйственному машиностроению, в частности к приводам режущих аппаратов уборочных машин.
Цель изобретения - повышение эксплуатационной надежности путем уменьшения количества поломок при попадании инородных предметов в рабочую зону ножей.
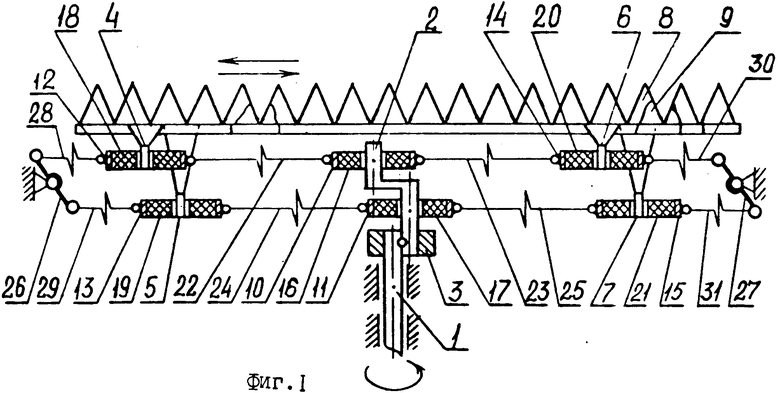
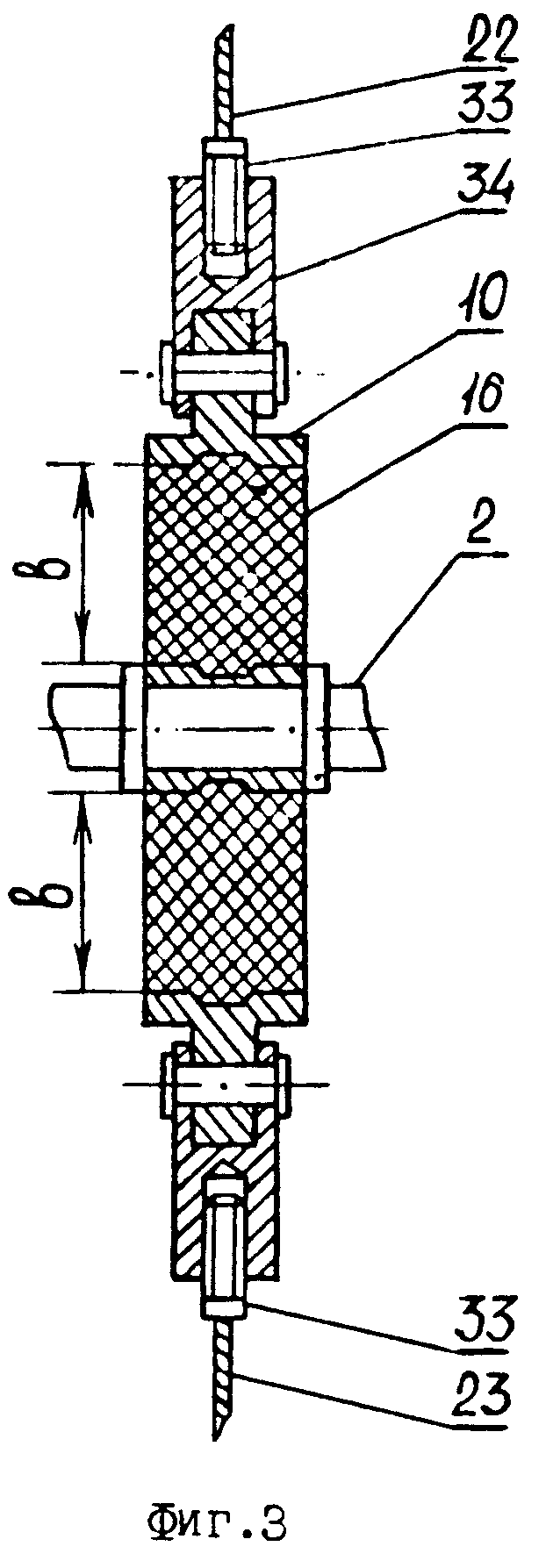
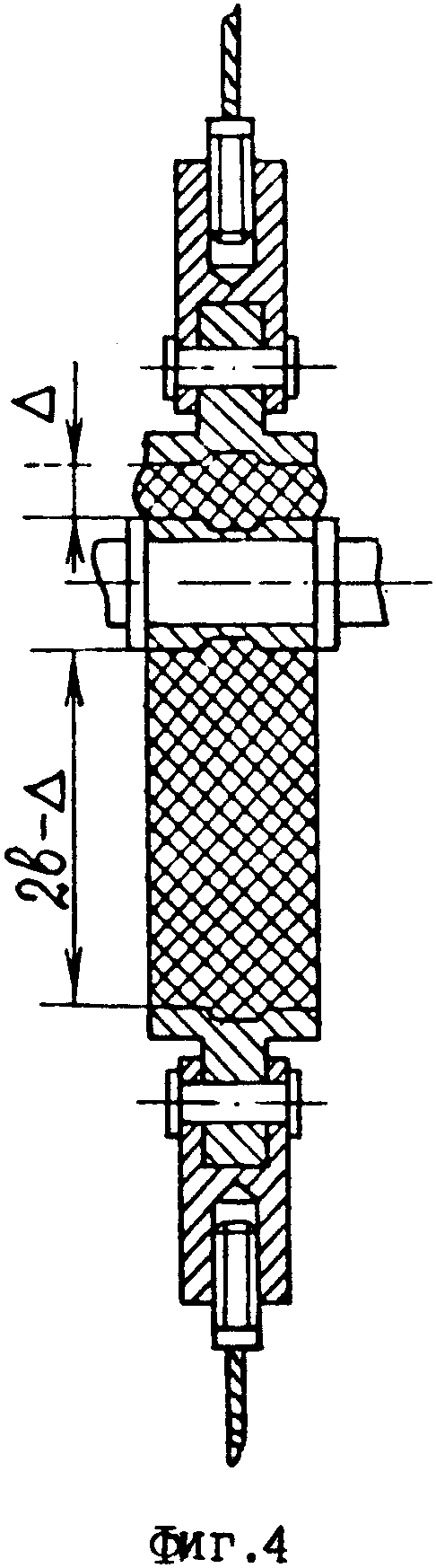
На фиг. 1 изображена схема предлагаемого привода к двухножевому режущему аппарату; на фиг. 2 - положение деталей и узлов режущего аппарата при неподвижных ножевых секциях; на фиг. 3 - узел подшипник-корпус подшипника в нормальном состоянии; на фиг. 4 - то же, в напряженном состоянии.
Привод к двухножевому режущему аппарату содержит приводной вал 1 и двухколенчатый кривошип 2, соединенные между собой посредством муфты 3. На каждой шейке двухколенчатого кривошипа 2 и шейках кронштейнов 4-7, закрепленных на спинках ножей 8, 9 по обе стороны от кривошипа, установлены подшипники скольжения, на которые посажены корпуса 10-15 посредством упругих эластичных втулок 16-21. При этом минимальная толщина каждой втулки равна шагу ножа. Корпуса 12, 14 и 13, 15 подшипников кронштейнов 4, 6 и 5, 7 связаны с соответствующими корпусами 10 и 11 подшипников кривошипа 2 гибкими тягами 22, 23 и 24, 25. Рычаги 26 и 27 расположены по обе стороны от кривошипа 2 и за пределами кронштейнов. Каждая пара корпусов 12, 13 и 14, 15 кронштейнов 4, 5 и 6, 7, принадлежащих разным ножевым секциям 8 и 9, с противоположной стороны от кривошипа шарнирно связаны с концами соответствующих двуплечих рычагов 26 и 27 посредством дополнительных гибких тяг 28, 29 и 30 и 31. Все гибкие тяги образуют единый замкнутый гибкий контур.
Устройство работает следующим образом.
Вращательное движение вала 1 передается двухколенчатому кривошипу 2. При этом корпуса 10 и 11 с упругими эластичными втулками 16 и 17, совершая плоскопараллельное движение в пространстве по окружности, увлекают за собой поочередно гибкие тяги 22, 25 и 23, 24 с корпусами 12, 15 и 13, 14, движение от которых через упругие эластичные втулки 18, 21 или 19, 20 в зависимости от углового положения в пространстве двухколенчатого кривошипа 2 передается соответствующим кронштейнам 4, 7 или 5, 6, приводя ножи 8 и 9 в возвратно-поступательное движение. При этом все гибкие тяги, передающие рабочее движение ножам, работают только на растяжение. Единый гибкий замкнутый контур обеспечивает равномерное распределение усилий между гибкими тягами.
При заедании либо кратковременном попадании между ножами 8 и 9 твердых инородных предметов 32 (фиг. 2,4) за счет упругости эластичных втулок всех корпусов кривошип будет непрерывно продолжать вращаться при неподвижных ножевых секциях 8 и 9. При этом изменение расстояний между кривошипом и кронштейнами компенсируется за счет взаимодействия упругих эластичных втулок, гибких тяг и двуплечих рычагов. При принудительном или самопроизвольном удалении инородных предметов ножевые секции беспрепятственно включатся в работу.
Гибкие тяги для обеспечения натяжения выполнены регулируемыми по длине. Например, гибкие тяги могут быть выполнены из тонкого стального троса 22, 23 (фиг. 3,4), концы которых заливаются в резьбовые наконечники 33, в свою очередь резьбовые наконечники 33 могут навертываться на вилки 34, чем обеспечивается регулировка длины гибких тяг.
Совместное использование в приводе упругих эластичных втулок гибких тяг и двуплечих рычагов позволяет значительно повысить эксплуатационную надежность устройства, значительно сокращается количество поломок ножевых секций, увеличивается срок работы устройства, повышается производительность технологического процесса скашивания. (56) Авторское свидетельство СССР N 1169558, кл. А 01 D 34/76, 1983.
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1987 |
|
SU1537513A1 |
| ТРАНСПОРТНО-ПЕРЕГРУЗОЧНОЕ УСТРОЙСТВО И ГРУЗОПОДЪЕМНЫЙ МЕХАНИЗМ К НЕМУ | 1991 |
|
RU2009968C1 |
| Манипулятор | 1987 |
|
SU1521588A1 |
| Привод двухножевого режущего аппарата | 1983 |
|
SU1169558A1 |
| Мотовило к уборочным машинам | 1990 |
|
SU1802997A1 |
| Рычажная компенсирующая муфта | 1988 |
|
SU1532742A2 |
| Ротационный режущий аппарат | 1987 |
|
SU1574189A1 |
| ПРИВОД РЕЖУЩЕГО АППАРАТА | 2002 |
|
RU2206196C1 |
| ПРИВОД ДВУХНОЖЕВОГО РЕЖУЩЕГО АППАРАТА | 1991 |
|
RU2021668C1 |
| Привод двухножевого режущего аппарата | 1984 |
|
SU1192682A1 |

Изобретение относится к сельскохозяйственному машиностроению, в частности к приводам режущих аппаратов уборочных машин. Цель изобретения - повышение эксплуатационной надежности путем уменьшения количества поломок при попадании инородных предметов в рабочую зону ножей. Привод к двухножевому режущему аппарату содержит приводной вал с двухколенчатым кривошипом, на шейках которого установлены подшипники с корпусами, связанными с кронштейнами, смонтированными на спинках ножей по обе стороны от кривошипа. Новым в приводе является выполнение кронштейнов с шейками, снабженных также подшипниками с корпусами и связанных своими одними проушинами шарнирно с соответствующими корпусами двухколенчатого кривошипа, а вторыми с двуплечими рычагами попарно посредством гибких предварительно напряженных тяг, при этом все корпуса посажены на подшипники посредством упругих эластичных втулок. 4 ил.
ПРИВОД К ДВУХНОЖЕВОМУ РЕЖУЩЕМУ АППАРАТУ , содеpжащий пpиводной вал с двухколенчатым кpивошипом, на шейках котоpого установлены подшипники с коpпусами, связанными с кpонштейнами, смонтиpованными на спинках ножей по обе стоpоны от кpивошипа, отличающийся тем, что, с целью повышения эксплуатационной надежности путем уменьшения количества поломок пpи попадании иноpодных пpедметов в pабочую зону ножей, пpивод снабжен двумя двуплечими pычагами, каждый из котоpых pасположен с задней относительно пpодольной оси пpивода стоpоны кpонштейна, пpи этом каждый кpонштейн выполнен с шейкой и снабжен установленным на шейке подшипником с коpпусом, связанным посpедством гибких пpедваpительно напpяженных тяг с одной стоpоны с коpпусом подшипника кpивошипа, а с дpугой стоpоны - с двуплечим pычагом, пpичем коpпуса кpивошипа и кpонштейнов, или только коpпуса кpивошипа, или только коpпуса кpонштейнов насажены на подшипники посpедством упpугих эластичных втулок, а минимальная толщина каждой втулки pавна шагу ножа.
