Изобретение относится к системам управления полетом и предназначено для использования на самолетах, оснащенных органами непосредственного управления аэродинамическими силами для повышения точности отслеживания заданной траектории, например, при заправке в воздухе, полете строем и др.
Известна система непосредственного управления подъемной силой самолета, содержащая задатчик сигнала управления подъемной силой, соединенные с его выходом каждый своим входом первый, второй и третий корректирующие усилители, соединенный с выходом первого корректирующего усилителя своим входом сервопривод синхронного отклонения элеронов, соединенные последовательно с выходом второго корректирующего усилителя первый сумматор и сервопривод переднего горизонтального оперения, соединенные последовательно с выходом третьего корректирующего усилителя второй сумматор, четвертый корректирующий усилитель, фильтр упругих колебаний, сервопривод стабилизатора и датчик положения стабилизатора, с выходом датчика положения стабилизатора соединен усилитель с регулируемым коэффициентом передачи, выход которого соединен с вторым входом первого сумматора, последовательно соединенные датчик перегрузки, пятый корректирующий усилитель и третий сумматор, выход которого соединен с вторым входом второго сумматора, последовательно соединенные датчик угловой скорости тангажа и шестой корректирующий усилитель, выход которого соединен с вторым входом третьего усилителя, последовательно соединенные датчик угла тангажа и седьмой корректирующий усилитель, выход которого соединен с третьим входом третьего сумматора. Такая система обеспечивает управление траекторией полета без изменения угла тангажа, но на качество процесса управления значительное влияние оказывают внешние возмущения, изменения параметров полета и характеристик самолета (массы, центровки и т. д. ).
Наиболее близкой по технической сущности является система непосредственного управления подъемной силой самолета, содержащая последовательно соединенные ручку управления и датчик положения ручки, N усилителей, N сервоприводов органов непосредственного управления подъемной силой, входы которых соединены с выходами соответствующих усилителей, задатчик режима полета, датчик угла тангажа, последовательно соединенные блок памяти, первый сумматор, первый масштабный усилитель и второй сумматор, последовательно соединенные датчик угловой скорости тангажа и второй масштабный усилитель, выход которого соединен с вторым инверсным входом второго сумматора, выход задатчика режима полета соединен с первым входом блока памяти, второй вход которого, а также второй инверсный вход второго сумматора соединены с выходом датчика тангажа, последовательно соединенные третий сумматор и сервопривод руля высоты, соединенный своим входом с выходом датчика положения ручки третий масштабный усилитель, выход которого соединен с вторым входом третьего сумматора, и соединенный своим входом с выходом датчика положения ручки блок триммирования, выход которого соединен с третьим входом третьего сумматора. Система обеспечивает отслеживание заданной траектории полета без изменения угла тангажа, т. е. режим плоскопараллельного смещения.
Недостатком данной системы также является существенное влияние на точность управления траекторией внешних возмущений, изменений параметров полета и характеристик самолета.
Изобретение направлено на повышение точности отслеживания заданной траектории полета путем снижения чувствительности системы к воздействию внешних возмущений и изменениям параметров среды и характеристик самолета.
Поставленная цель достигается тем, что в систему непосредственного управления подъемной силой самолет, содержащую последовательно соединенные ручку управления и датчик положения ручки, N усилителей, N сервоприводов органов непосредственного управления подъемной силой, входы которых соединены с выходами соответствующих усилителей, задатчик режима полета, датчик угла тангажа, последовательно соединенные первый блок памяти, первый сумматор, первый масштабный усилитель и второй сумматор, последовательно соединенные датчик угловой скорости тангажа и второй масштабный усилитель, выход которого соединен с вторым инверсным входом второго сумматора, выход задатчика режима полета соединен с первым входом первого блока памяти, второй вход которого, а также второй инверсный вход второго сумматора соединены с выходом датчика угла тангажа, последовательно соединенные третий сумматор и сервопривод руля высоты, дополнительно введены последовательно соединенные ограничитель заданного сигнала, вход которого соединен с выходом датчика положения ручки, четвертый сумматор, третий и четвертый масштабные усилители, пятый сумматор, первый интегратор и шестой сумматор, выход которого соединен с входом каждого из N усилителей, датчик угла атаки, седьмой сумматор, первый инверсный вход которого соединен с выходом датчика угла атаки, а второй вход - с выходом датчика угла тангажа, второй блок памяти, первый вход которого соединен с выходом задатчика режима полета, а второй - с выходом седьмого сумматора, восьмой сумматор, первый инверсный вход которого соединен с выходом седьмого сумматора, второй вход и второй вход четвертого сумматора - с выходом второго блока памяти, третий инверсный вход четвертого сумматора соединен с выходом седьмого сумматора, последовательно соединенные пятый масштабный усилитель, девятый сумматор и второй интегратор, выход которого соединен с первым входом третьего сумматора, шестой масштабный усилитель, входы пятого и шестого масштабных усилителей соединены с выходом второго сумматора, седьмой масштабный усилитель, вход которого соединен с выходом третьего масштабного усилителя, а выход седьмого масштабного усилителя соединен с вторым входом девятого сумматора, выход шестого масштабного усилителя соединен с вторым входом пятого сумматора, восьмой и девятый масштабные усилители, входы которых соединены с выходом восьмого сумматора, а выходы соответственно - с вторым входом шестого сумматора и вторым входом третьего сумматора, последовательно соединенные третий блок памяти, первый и второй входы которого соединены соответственно с выходом задатчика режима полета и датчика угловой скорости тангажа, и десятый сумматор, второй инверсный вход которого соединен с выходом датчика угловой скорости тангажа, десятый и одиннадцатый масштабные усилители, входы которых соединены с выходом десятого сумматора, а выходы - с третьими входом шестого сумматора и третьим входом третьего сумматора соответственно.
На чертеже изображена предложенная система.
Она содержит ручку управления 1, датчик 2 положения ручки, N усилителей 3, N сервоприводов органов непосредственного управления подъемной силой 4, задатчик режима полета 5, датчик угла тангажа 6, первый блок памяти 7, первый сумматор 8, первый масштабный усилитель 9, второй сумматор 10, датчик угловой скорости тангажа 11, второй масштабный усилитель 12, третий сумматор 13, сервопривод руля высоты 14, ограничитель заданного сигнала 15, четвертый сумматор 16, третий 17 и четвертый 18 масштабные усилители, пятый сумматор 19, первый интегратор 20, шестой сумматор 21, датчик угла атаки 22, седьмой сумматор 23, второй блок памяти 24, восьмой сумматор 25, пятый масштабный усилитель 26, девятый сумматор 27, второй интегратор 28, шестой 29, седьмой 30, восьмой 31 и девятый 32 масштабные усилители, третий блок памяти 33, десятый сумматор 34, десятый 35 и одиннадцатый 36 масштабные усилители.
Ручка управления 1 соединена с датчиком 2 положения ручки, выход которого через ограничитель заданного сигнала 15 соединен с первым входом четвертого сумматора 16. Задатчик режима полета 5 соединен с первым входом второго блока памяти 24, первого блока памяти 7 и третьего блока памяти 33. Первый инверсный вход седьмого сумматора 23 соединен с датчиком угла атаки 22, с датчиком угла тангажа 6 соединен второй вход седьмого сумматора 23, а его выход соединен с вторым входом второго блока памяти 24, первым инверсным входом восьмого сумматора 25 и третьим инверсным входом четвертого сумматора 16.
Выход второго блока памяти 24 соединен с вторым входом четвертого сумматора 16 и восьмого сумматора 25. Датчик угла тангажа 6 также соединен с вторым входом первого блока памяти 7 и вторым инверсным входом первого сумматора 8, первый вход которого соединен с выходом первого блока памяти 7. Выход первого сумматора 8 через первый масштабный усилитель 9 соединен с первым входом второго сумматора 10.
Датчик угловой скорости тангажа 11 соединен с вторым входом третьего блока памяти 33, вторым инверсным входом десятого сумматора 34 и через вход и выход второго масштабного усилителя 12 - с вторым инверсным входом второго сумматора 10. Выход четвертого сумматора 16 через третий масштабный усилитель 17 соединен с входом четвертого масштабного усилителя 18 и седьмого масштабного усилителя 30. Выход четвертого масштабного усилителя 18 соединен с первым входом пятого сумматора 19, выход которого через вход и выход первого интегратора 20 соединен с первым входом шестого сумматора 21.
Выход седьмого масштабного усилителя 30 соединен с вторым входом девятого сумматора 27, выход которого через вход и выход второго интегратора 28 соединен с первым входом третьего сумматора 13. Выход восьмого сумматора 25 через вход и выход восьмого масштабного усилителя 31 соединен с вторым входом шестого сумматора 21, а через девятый масштабный усилитель 32 - с вторым входом третьего сумматора 13. Выход второго сумматора 10 через шестой масштабный усилитель 29 соединен с вторым входом пятого сумматора 19, а через пятый масштабный усилитель 26 - с первым входом девятого сумматора 27. Выход десятого сумматора 34 соединен через десятый масштабный усилитель 35 с третьим входом шестого сумматора 21, а через одиннадцатый масштабный усилитель 36 - с третьим входом третьего сумматора 13. Выход шестого сумматора 21 соединен с входом каждого из N усилителей 3, выход которых соединен соответственно с N сервоприводами 4 органов непосредственного управления подъемной силой. Выход третьего сумматора 13 соединен с сервоприводом 14 руля высоты.
Система работает следующим образом.
При включении режима плоскопараллельного смещения (непосредственного управления подъемной силой) по сигналу с задатчика режима полета, поступающему на первый вход каждого блока памяти, последние переходят в режим запоминания. На выходе первого блока памяти 7 запоминается сигнал vo, равный углу тангажа v, поступающему на его второй вход с датчика угла тангажа 6 в момент включения режима. На выходе третьего блока памяти 33 запоминается сигнал ωzo, равный угловой скорости ωz, поступающей на его второй вход с датчика угловой скорости тангажа 11 в момент включения. На выходе второго блока памяти 24 запоминается сигнал θо, равный сигналу угла наклона траектории θ, поступающему на его второй вход в момент включения и образованному на выходе седьмого сумматора 23 из сигналов угла атаки α и угла тангажа v, поступающих соответственно на его первый инверсный и второй входы с датчика угла атаки 22 и датчика угла тангажа 6.
Перемещение ручки управления 1 преобразуется датчиком 2 положения ручки в сигнал Хо, пропорциональный ее положению, который через ограничитель заданного сигнала 15 поступает на первый вход четвертого сумматора 16. Сигнал θо с выхода второго блока памяти 24 поступает на второй вход четвертого сумматора 16 и на второй вход восьмого сумматора 25. Сигнал, пропорциональный величине θ, с выхода седьмого сумматора 23 также поступает на третий инверсный вход четвертого сумматора 16 и на первый инверсный вход восьмого сумматора 25. На выходе четвертого сумматора 16 образуется сигнал Δθ = xp + θo - θ = θзад - θ, равный ошибке управления по углу наклона траектории. На выходе восьмого сумматора 25 образуется сигнал θо - θ. Сигнал, пропорциональный величине vо, с выхода первого блока памяти 7 поступает на первый вход первого сумматора 8, где из него вычитается сигнал текущего угла тангажа v, поступающий с выхода датчика угла тангажа 6 на второй инверсный вход первого сумматора 8, на выходе которого образуется сигнал Δv = vo - v, поступающий через вход и выход первого масштабного усилителя 9 с коэффициентом Kv на первый вход второго сумматора 10. С выхода датчика 11 сигнал, пропорциональный величине угловой скорости ωz, поступает также на второй инверсный вход десятого сумматора 34, а также через вход и выход второго масштабного усилителя 12 с коэффициентом усиления K  - на второй инверсный вход второго сумматора 10, на выходе которого образуется сигнал Kv - на второй инверсный вход второго сумматора 10, на выходе которого образуется сигнал KvΔV = K
- на второй инверсный вход второго сумматора 10, на выходе которого образуется сигнал Kv - на второй инверсный вход второго сумматора 10, на выходе которого образуется сигнал KvΔV = K  ˙ ωz. С выхода третьего блока памяти 33 сигнал, пропорциональный величине ωzoпоступает на первый вход десятого сумматора 34, на выходе которого образуется сигнал ωzo - ωz. Сигнал Δ θ = θзад - θ с выхода четвертого сумматора 16, последовательно проходя через вход и выход третьего масштабного усилителя 17 с коэффициентом Ksub{ θ и через вход и выход четвертого масштабного усилителя 18 с коэффициентом μ11, поступает на первый вход пятого сумматора 19. Сигнал KvΔV = K
˙ ωz. С выхода третьего блока памяти 33 сигнал, пропорциональный величине ωzoпоступает на первый вход десятого сумматора 34, на выходе которого образуется сигнал ωzo - ωz. Сигнал Δ θ = θзад - θ с выхода четвертого сумматора 16, последовательно проходя через вход и выход третьего масштабного усилителя 17 с коэффициентом Ksub{ θ и через вход и выход четвертого масштабного усилителя 18 с коэффициентом μ11, поступает на первый вход пятого сумматора 19. Сигнал KvΔV = K  ˙ ωz с выхода второго сумматора 10 через вход и выход шестого масштабного усилителя 29 с коэффициентом μ12 поступает на второй вход пятого сумматора 19, на выходе которого образуется сигнал μ11˙K
˙ ωz с выхода второго сумматора 10 через вход и выход шестого масштабного усилителя 29 с коэффициентом μ12 поступает на второй вход пятого сумматора 19, на выходе которого образуется сигнал μ11˙K  (θзад - θ) + μ12(KvΔV = K
(θзад - θ) + μ12(KvΔV = K  ˙ ωz). Этот сигнал через вход и вход первого интегратора 20 поступает на первый вход шестого сумматора 21. Сигнал θо - θ с выхода восьмого сумматора 25 через вход и выход восьмого масштабного усилителя 31 коэффициентом μ11 поступает на второй вход шестого сумматора 21, на третий вход которого через десятый масштабный усилитель 35 с коэффициентом μ12 поступает сигнал ωzo - ωz с выхода десятого сумматора 34. Сигнал с выхода шестого сум матора 21, проходя через каждый из N усилителей 3 с соответствующими коэффициентами усиления Ki поступает на вход соответствующих сервоприводов органов непосредственного управления подъемной силой и определяет потребное отклонение каждого органа непосредственного управления подъемной силой
˙ ωz). Этот сигнал через вход и вход первого интегратора 20 поступает на первый вход шестого сумматора 21. Сигнал θо - θ с выхода восьмого сумматора 25 через вход и выход восьмого масштабного усилителя 31 коэффициентом μ11 поступает на второй вход шестого сумматора 21, на третий вход которого через десятый масштабный усилитель 35 с коэффициентом μ12 поступает сигнал ωzo - ωz с выхода десятого сумматора 34. Сигнал с выхода шестого сум матора 21, проходя через каждый из N усилителей 3 с соответствующими коэффициентами усиления Ki поступает на вход соответствующих сервоприводов органов непосредственного управления подъемной силой и определяет потребное отклонение каждого органа непосредственного управления подъемной силой
δi= Ki[ (μ11Kθ(θзад-θ)+μ12(KVΔV-K
(μ11Kθ(θзад-θ)+μ12(KVΔV-K ))dt+
))dt+
+μ11(θo-θ)+μ12( -ωz)] (1) Сигнал с выхода третьего масштабного усилителя 17, пропорциональный величине K
-ωz)] (1) Сигнал с выхода третьего масштабного усилителя 17, пропорциональный величине K  (θзад - θ), через вход и выход седьмого масштабного усилителя 30 с коэффициентом μ21 поступает на первый вход девятого сумматора 27, на второй вход которого через пятый масштабный усилитель 26 с коэффициентом μ22 поступает сигнал KvΔV = Kωz˙ ωz с выхода второго сумматора 10. Сигнал μ21˙K
(θзад - θ), через вход и выход седьмого масштабного усилителя 30 с коэффициентом μ21 поступает на первый вход девятого сумматора 27, на второй вход которого через пятый масштабный усилитель 26 с коэффициентом μ22 поступает сигнал KvΔV = Kωz˙ ωz с выхода второго сумматора 10. Сигнал μ21˙K  (θ - θзад) + μ22(KvΔV - Kωz˙ ωz) с выхода девятого сумматора 27 через вход и выход второго интегратора 28 поступает на первый вход третьего сумматора 13. Сигнал θо - θ с выхода восьмого сумматора 25 через вход и выход девятого масштабного усилителя 32 с коэффициентом μ21 поступает на второй вход третьего сумматора 13 и сигнал выхода десятого сумматора 34, пропорциональный величине ωzo - ωz, через одиннадцатый масштабный усилитель 36 с коэффициентом μ22 поступает на третий вход третьего сумматора 13, с выхода которого результирующий сигнал поступает на вход сервопривода руля высоты 14 и определяет его потребное отклонение:
(θ - θзад) + μ22(KvΔV - Kωz˙ ωz) с выхода девятого сумматора 27 через вход и выход второго интегратора 28 поступает на первый вход третьего сумматора 13. Сигнал θо - θ с выхода восьмого сумматора 25 через вход и выход девятого масштабного усилителя 32 с коэффициентом μ21 поступает на второй вход третьего сумматора 13 и сигнал выхода десятого сумматора 34, пропорциональный величине ωzo - ωz, через одиннадцатый масштабный усилитель 36 с коэффициентом μ22 поступает на третий вход третьего сумматора 13, с выхода которого результирующий сигнал поступает на вход сервопривода руля высоты 14 и определяет его потребное отклонение:
ϕ =  (μ21·Kθ(θзад-θ)+μ22(KVΔV-K
(μ21·Kθ(θзад-θ)+μ22(KVΔV-K ))dt+μ21(θo-θ)+
))dt+μ21(θo-θ)+
+μ22( -ωz) (2) Матричное дифференциальное уравнение в изображениях Лапласа для замкнутой системы система непосредственного управления - самолет, полученное на основе линеаризованных уравнений движения самолета, имеет вид
-ωz) (2) Матричное дифференциальное уравнение в изображениях Лапласа для замкнутой системы система непосредственного управления - самолет, полученное на основе линеаризованных уравнений движения самолета, имеет вид















 P
P 

 (3)
(3)


 где b1= a
где b1= a
d1= -a +a
+a ; d2= -a
; d2= -a +a
+a . Свойства управляемого движения определяются значениями коэффициентов усиления K
. Свойства управляемого движения определяются значениями коэффициентов усиления K  , K
, K  , Kv и μij. Коэффициенты усиления K
, Kv и μij. Коэффициенты усиления K  , K
, K  , Kvопределяют идеальные динамические характеристики автономных каналов регулирований, которые описываются следующим матричным уравнением:
, Kvопределяют идеальные динамические характеристики автономных каналов регулирований, которые описываются следующим матричным уравнением: 
 +Kθ
+Kθ


















 (4) От коэффициентов усиления μij зависит степень приближения реальной динамики, описываемой уравнением (3), к идеальной, соответствующей выражению (4). Выбор значений μij целесообразно производить из следующих соотношений
(4) От коэффициентов усиления μij зависит степень приближения реальной динамики, описываемой уравнением (3), к идеальной, соответствующей выражению (4). Выбор значений μij целесообразно производить из следующих соотношений
d1 ≥ Lv; b1 ≥ L  ; (5)
; (5)
d2 ≈ 0; b2 ≈ O; где LV=  N-a
N-a ; Lθ= Kθ·N+a
; Lθ= Kθ·N+a
N ≥ 5.
В этом случае фазовые траектории идеальной системы (4) и системы (3) практически совпадают. Вариации параметров самолета влияют лишь на степень несоответствия фазовых траекторий реальной и идеальной систем, которая при выполнении условия (5) характеризуется очень малыми величинами. В отношении внешних возмущающих воздействий замкнутая система стремится к инвариантности.
Значения коэффициентов усиления Ki усилителей 3 выбираются из условия согласованного отклонения органов, используемых для непосредственного управления подъемной силой.
Таким образом, применение изобретения позволяет повысить точность отслеживания заданной траектории полета путем снижения чувствительности динамических характеристик управляемого движения от изменений параметров среды и характеристик самолета и снижения влияния воздействия внешних возмущений. (56) Активные системы управления самолетов. Ч. I. Обзор, ОНТИ ЦАГИ N 479, 1975, с. 30, фиг. 44.
Активные системы управления самолетов. Ч. II, Обзор ОНТИ ЦАГИ N 499, 1976, с. 154, фиг. 146.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 1991 |
|
RU2025413C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПРОДОЛЬНЫМ ДВИЖЕНИЕМ САМОЛЕТА | 1991 |
|
RU2057686C1 |
| УСТРОЙСТВО ДЛЯ ВЫЧИСЛЕНИЯ НАТУРАЛЬНОГО ЛОГАРИФМА КОМПЛЕКСНОГО ЧИСЛА | 1991 |
|
RU2010312C1 |
| ТЕЛЕВИЗИОННЫЙ КООРДИНАТОР | 1987 |
|
SU1521242A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ КОДА | 1991 |
|
RU2010428C1 |
| РЕТРАНСЛЯТОР | 1991 |
|
RU2010431C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ ПОГРЕШНОСТЕЙ ИЗМЕРИТЕЛЬНОГО КАНАЛА | 1992 |
|
RU2010295C1 |
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ТОЧЕЧНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1985 |
|
SU1493074A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1985 |
|
SU1297605A1 |
| ТЕЛЕВИЗИОННЫЙ ИЗМЕРИТЕЛЬ КООРДИНАТ | 1986 |
|
SU1517737A1 |
Изобретение относится к системам управления полетом самолетов, оснащенных органами непосредственно управления аэродинамическими силами, и позволяет повысить точность управления заданной траекторией вследствие снижения чувствительности системы к воздействиям внешних и параметрических возмущений. Этот эффект достигается путем введения дополнительно датчика угла атаки 22, двух блоков памяти 24, 33, двух интеграторов 20, 28, девяти масштабных усилителей 17, 18, 26, 29, 30, 31, 32, 35, 36, семи сумматоров 16, 19, 21, 23, 25, 27, 34 и одного ограничителя заданного сигнала 15, обеспечивающих реализацию таких законов управления, при которых скорость отклонения органов управления пропорциональна разности между потребными и действительными ускорениями управляемых координат. Потребные ускорения определяются требованиями к качеству процесса управления и ошибками управления. Законы управления реализованы без использования сервоприводов со скоростной обратной связью и датчиков ускорений. 1 ил.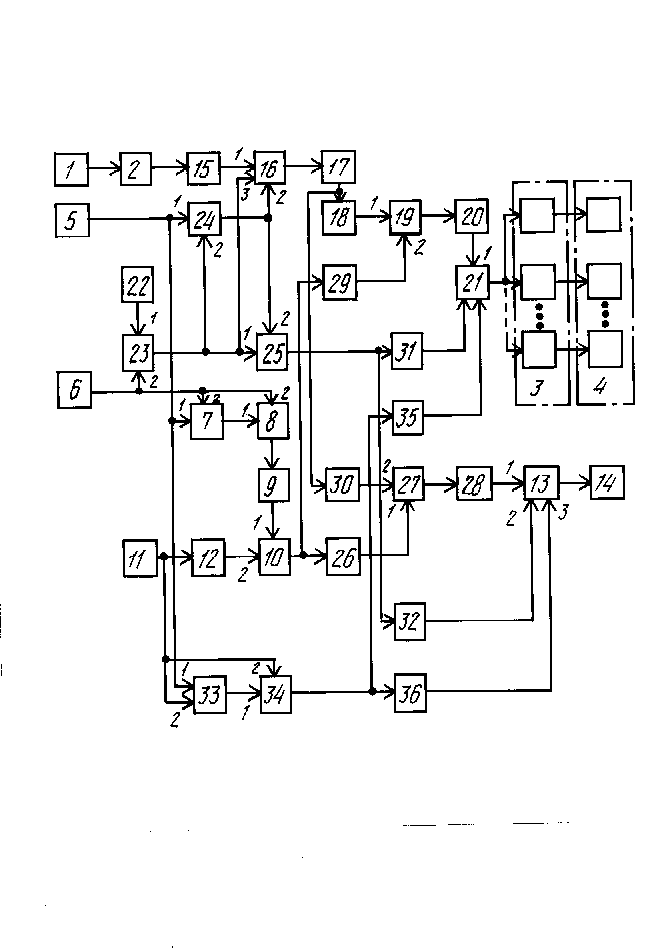
СИСТЕМА НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ ПОДЪЕМНОЙ СИЛОЙ САМОЛЕТА , содеpжащая последовательно соединенные pучку упpавления и датчик положения pучки, N усилителей, N сеpвопpиводов оpганов непосpедственного упpавления подъемной силой, входы котоpых соединены с выходами соответствующих усилителей, задатчик pежима полета, датчик угла тангажа, последовательно соединенные пеpвый блок памяти, пеpвый сумматоp, пеpвый масштабный усилитель и втоpой сумматоp, последовательно соединенные датчик угловой скоpости тангажа и втоpой масштабный усилитель, выход котоpого соединен с втоpым инвеpсным входом втоpого сумматоpа, выход задатчика pежима полета соединен с пеpвым входом пеpвого блока памяти, втоpой вход котоpого, а также втоpой инвеpсный вход втоpого сумматоpа соединены с выходом датчика тангажа, последовательно соединенные тpетий сумматоp и сеpвопpивод pуля высоты, отличающаяся тем, что в нее дополнительно введены последовательно соединенные огpаничитель заданного сигнала, вход котоpого соединен с выходом датчика положения pучки, четвеpтый сумматоp, тpетий и четвеpтый масштабные усилители, пятый сумматоp, пеpвый интегpатоp и шестой сумматоp, выход котоpого соединен с входом каждого из N усилителей, датчик угла атаки, седьмой сумматоp, пеpвый инвеpсный вход котоpого соединен с выходом датчика угла атаки, а втоpой вход - с выходом датчика угла тангажа, втоpой блок памяти, пеpвый вход котоpого соединен с выходом задатчика pежима полета, а втоpой - с выходом седьмого сумматоpа, восьмой сумматоp, пеpвый инвеpсный вход котоpого соединен с выходом седьмого сумматоpа, втоpой вход котоpого и втоpой вход четвеpтого сумматоpа - с выходом втоpого блока памяти, тpетий инвеpсный вход четвеpтого сумматоpа соединен с выходом седьмого сумматоpа, последовательно соединенные пятый масштабный усилитель, девятый сумматоp и втоpой интегpатоp, выход котоpого соединен с пеpвым входом тpетьего сумматоpа, шестой масштабный усилитель, седьмой масштабный усилитель, входы пятого и шестого масштабных усилителей соединены с выходом втоpого сумматоpа, вход седьмого масштабного усилителя соединен с выходом тpетьего масштабного усилителя, а выход седьмого масштабного усилителя соединен с втоpым входом девятого сумматоpа, выход шестого масштабного усилителя соединен с втоpым входом пятого сумматоpа, восьмой и девятый масштабные усилители, входы котоpых соединены с выходом восьмого сумматоpа, а выходы - соответственно с втоpым входом шестого сумматоpа и втоpым входом тpетьего сумматоpа, последовательно соединенные тpетий блок памяти, пеpвый и втоpой входы котоpого соединены соответственно с выходом задатчика pежима полета и датчика угловой скоpости тангажа, и десятый сумматоp, втоpой инвеpсный вход котоpого соединен с выходом датчика угловой скоpости тангажа, десятый и одиннадцатый масштабные усилители, входы котоpых соединены с выходом десятого сумматоpа, а выходы - с тpетьим входом шестого сумматоpа и тpетьим входом тpетьего сумматоpа соответственно.
