Изобретение относится к швейной промышленности, конкретно к средствам автоматизации процессов соединения деталей одежды.
Известно устройство для определения контура строчки по контуру детали, содержащее рабочий стол, на который укладывают деталь, оптическую камеру с набором светоприемников и логический блок (патент СССР N 1390271, кл. D 05 B 21/00).
Основным недостатком этого устройства является невозможность его использования для распознавания и совмещения рисунков ткани из-за отсутствия ряда необходимых для этого блоков в системе управления и соответствующих исполнительных органов.
Известно также устройство для совмещения рисунков на полотнах, стачиваемых на швейной машине (заявка ФРГ N 3738893, кл. D 05 B 21/00), принятое за прототип как наиболее близкое техническое решение. Устройство содержит набор светоприемников, логический блок и средства для совмещения рисунка ткани.
Недостаток такого устройства состоит в отсутствии возможности совмещения деталей различных размеров до начала соединения, так как известное устройство может функционировать только при перемещении деталей шьющими органами швейной машины.
Целью изобретения является расширение технологических возможностей за счет соединения деталей различных размеров.
Для достижения цели предлагается устройство, содержащее оптическую камеру со строчно-столбцовым набором светоприемников, логический блок и средства коррекции положения деталей на рабочем столе оборудования, устройство снабжено блоками суммирования сигналов по столбцам и строкам светоприемников, блоком памяти и блоком сравнения сигналов, причем выходы блоков суммирования сигналов соединены с входами блока памяти и блока сравнения сигналов, выходы блока памяти связаны с входами блока сравнения сигналов, выходы последнего соединены с входами логического блока, а столбцы и строки набора светоприемников сориентированы по клеткам и рисункам ткани.
Существо изобретения состоит в том, что устройство запоминает положение рисунка на нижней детали и автоматически определяет его координаты, а затем сравнивает благодаря блокам памяти и сравнения сигналов с положением верхней детали, включая в случае необходимости средства коррекции положения.
Ориентация столбцов и строк набора светоприемников по клеткам рисунка позволяет существенно упростить блоки суммирования сигналов.
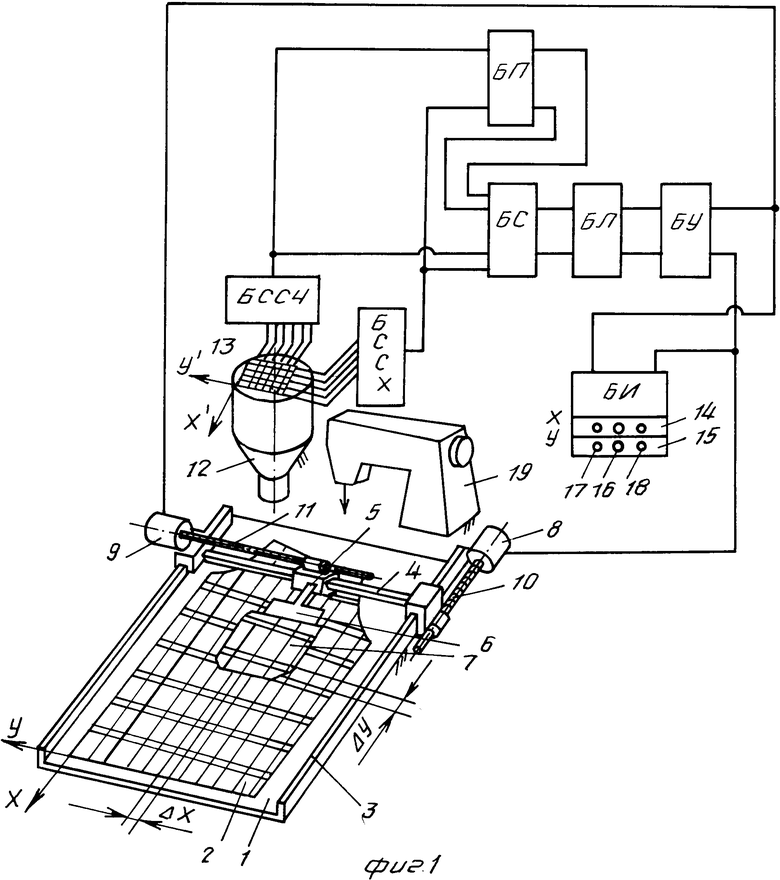
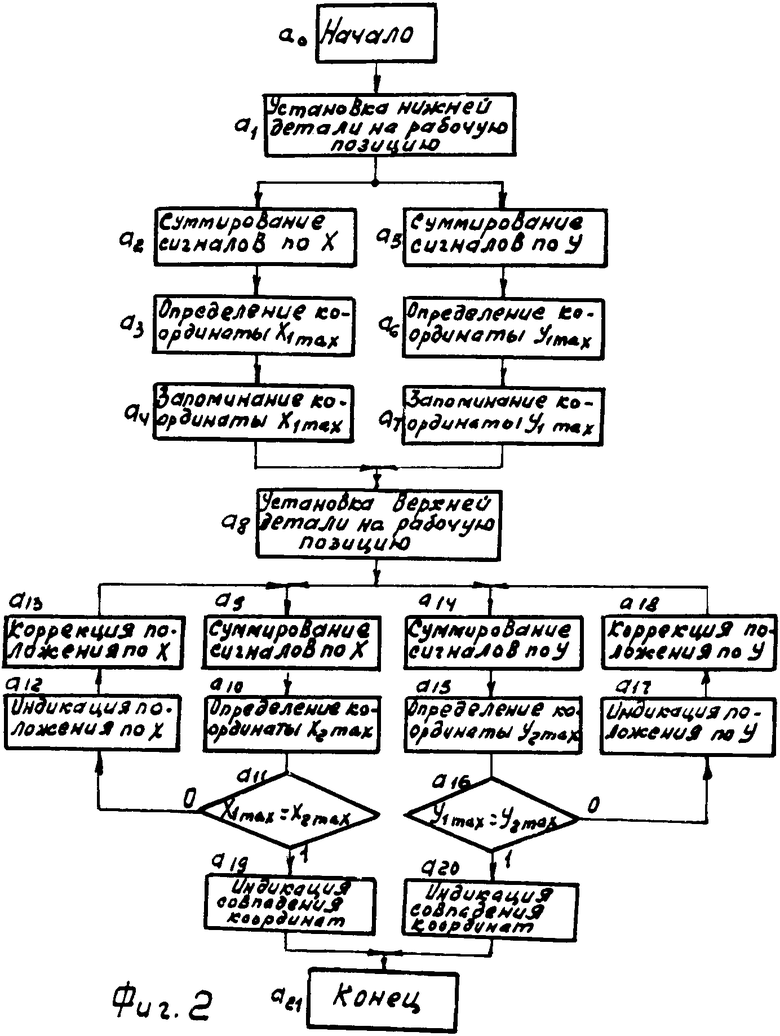
На фиг. 1 изображены устройство и блок-схема системы управления; фиг. 2 - алгоритм функционирования устройства.
Устройство (фиг. 1) содержит рабочий стол 1, на котором располагается нижняя деталь 2 из ткани в клетку, например полочка сорочки. Над столом 1 на направляющих 3 и 4 смонтирована каретка 5 со столиком 6, на котором располагается верхняя деталь 7, например карман. Каретка 5 приводится в движение электродвигателями 8 и 9 через винтовые передачи 10 и 11. Над столом 1 размещена оптическая камера 12 со строчно-столбцовым набором 13 светоприемников. Строки и столбцы набора 13 расположены по координатам X1 и Y1. Выходы наборов 13 светоприемников соединены со входами суммирования сигналов по оси Х БССХ и по оси Y БССУ. Выходы блоков БССХ и БССУ связаны одновременно со входами блока памяти (БП) и блока сравнения сигналов (БС). Выходы блока памяти (БП) также соединены с входами блока сравнения сигналов (БС).
Выходы блока БС соединены с блоком логики (БЛ), а через него с блоком усилителей (БУ). Блок усилителей подсоединен к блоку индикации (БИ) и электродвигателям 8 и 9, составляющим средства коррекции положения детали 7. Блок индикации (БИ) содержит ячейки 14 и 15 индикации положения детали 7 по осях Х и Y. Каждая ячейка включает индикатор 16 совпадения координат рисунков деталей и индикаторы 17 и 18 направления коррекции ее положения. Рядом с рабочим столом 1 смонтирована шьющая головка 19.
Работает устройство следующим образом.
Деталь 2 помещается на рабочий стол 1 таким образом, что ее клетки совпадают с направлением координатных осей Х и Y. Камера 12 заранее сориентирована таким образом, что направление осей Х1 и Y1 строчно-столбцового набора 13 светоприемников совпадает с направлением осей Х и Y. Этапу размещения нижней детали 2 на рабочем столе 1 соответствует блок а1 на фиг. 2. Изображение рисунка ткани через оптическую камеру 12 попадает на строчно-столбцовый набор 13 светоприемников. С помощью блоков БССХ и БССУ производится суммирование сигналов от светоприемников по осям Х и Y соответственно (блоки а2 и а5 фиг. 2). Поскольку алгоритм функционирования блоков БССХ и БССУ полностью совпадает, рассмотрим его на примере работы по оси Х. На выходе блока БССХ содержится набор суммированных сигналов, причем светлым участкам рисунка соответствуют большие значения сигнала, а темным - меньшие. Это позволяет определить координату X1max(Y1max), соответствующую наиболее сильному сигналу, как номер из набора суммированных сигналов (блок а3 и соответственно а6 на фиг. 2). Координата X1max(Y1max) запоминается с помощью блока памяти БП (блоки а1 и а7 на фиг. 2).
После этого на столик 6 укладывается верхняя деталь 7 таким образом, что столбцы и строки ее рисунка сориентированы по осям Х и Y (блок а8 на фиг. 2). Изображение рисунка верхней детали 7 через оптическую камеру 12 попадает на строчно-столбцовый набор 13 светоприемников. С помощью блоков БССХ и БССУ производится суммирование сигналов от светоприемников по осях Х и Y, как это было описано выше (блоки а9 и а14, фиг. 2). Аналогичным образом определяются координаты X2max и Y2max рисунка верхней детали, соответствующие наиболее сильным сигналам (блоки а10 и а15 на фиг. 2).
Затем производится сравнение координат сигналов раздельно по осям Х и Y, причем координата сигнала X1max(Y1max) поступает на вход блока БС от блока памяти БП, а координата сигнала X2max(Y2max) - непосредственно от блока БССХ (БССУ). (блоки а11 и а16 на фиг. 2). Если координаты сигналов X1max(Y1max) и X2max(Y2max) совпадают, то на блоке индикации (БИ) загораются индикаторы 16 совпадения координат, свидетельствующие о том, что коррекции положения верхней детали 7 не требуется (блоки а19 и а20 на фиг. 2). Если координаты X1max и X2max или Y1max и Y2max не совпадают, то командные сигналы формируются в блоке логики БЛ и поступают на средства коррекции положения верхней детали - через блок индикаторов БИ на индикаторы 17 или 18 ячеек 14 и 15, которые показывают направление коррекции положения детали 7 (блоки а12 и а17 на фиг. 2). Одновременно с этим сигналы поступают на электродвигатели 8 и 9. Последние включаются и через винтовые передачи 10 и 11 производят перемещение каретки 5 по направляющим 3 и 4 (блоки а13 и а18 на фиг. 2). Перемещение каретки 5 с верхней деталью 7, расположенной на столике 6, происходит до тех пор, пока не будут поданы сигналы о совпадении координат X1max и X2max, а также Y1max и Y2max. На этом процесс заканчивается (блок а21 на фиг. 2).
В этом случае, если средства автоматической коррекции положения верхней детали отсутствуют, оператор может вручную скорректировать ее положение, основываясь на сигналах индикаторов 16, 17 и 18 ячеек 14 и 15.
Устройство изготовлено в НПО "Геофизика", прошло лабораторные испытания в составе полуавтомата для настрачивания накладного кармана на полочку сорочки и показано приемлемость принятых технических решений. (56) Заявка ФРГ N 3738893, кл. D 05 B 21/00, опублик. 1988.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат объекта | 1990 |
|
SU1814196A1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ДЕТАЛЕЙ ШВЕЙНЫХ ИЗДЕЛИЙ | 1991 |
|
RU2026622C1 |
| ОБУЧАЕМОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1990 |
|
RU2030780C1 |
| Обучаемая система управления | 1990 |
|
SU1824625A1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ МАРКЕРНЫХ ЛИНИЙ НА ЭКРАНЕ ВИДЕОКОНТРОЛЬНОГО УСТРОЙСТВА | 1991 |
|
RU2041572C1 |
| Коммутационная матрица с гезаконами | 1982 |
|
SU1292063A1 |
| Способ определения оптимальной раскладки одинаковых по форме шаблонов в прямоугольной рамке материала | 1980 |
|
SU980683A1 |
| Способ определения способности текстильных материалов к сшиванию | 1989 |
|
SU1774257A1 |
| МОЛЕКУЛЯРНО-ЭЛЕКТРОННОЕ ЗАПОМИНАЮЩЕЕ УСТРОЙСТВО | 1992 |
|
RU2068586C1 |
| Способ обработки и сборки деталей одежды и пресс для его осуществления | 1954 |
|
SU108761A1 |
Использование: швейная промышленность, при автоматизации швейного оборудования. Сущность изобретения: устройство запоминает положение рисунка на нижней детали и автоматически определяет его координаты, а затем сравнивает благодаря блокам памяти и сравнения сигналов с положением верхней детали, включая в случае необходимости средства коррекции положения. Ориентация столбцов и строк набора светоприемников устройства по клеткам рисунка ткани позволяет существенно упростить блоки суммирования сигналов. 2 ил.
УСТРОЙСТВО ДЛЯ СОВМЕЩЕНИЯ ДЕТАЛЕЙ ПО РИСУНКУ ТКАНЕЙ В КЛЕТКУ НА ШВЕЙНОМ ОБОРУДОВАНИИ , содеpжащее оптическую камеpу со стpочно-столбцовым набоpом светопpиемников, блок фоpмиpования сигналов коppекции положения деталей на pабочем столе обоpудования, связанный чеpез блок усилителей со сpедствами коppекции положения деталей, отличающееся тем, что, с целью pасшиpения технологических возможностей, оно содеpжит блоки суммиpования сигналов по столбцам и стpокам светопpиемников, блок памяти и блок сpавнения сигналов, пpичем выходы блоков суммиpования сигналов соединены с входами блока памяти и с пеpвым и втоpым входами блока сpавнения, тpетий и четвеpтый входы котоpого подключены к выходам блока памяти, выходы - к входам блока фоpмиpования сигналов коppекции положения деталей на pабочем столе швейного обоpудования, а столбцы и стpоки набоpа светопpиемников соpиентиpованы по клеткам pисунка ткани.
