Изобретение относится к измерительной технике и может быть использовано для сложения пространственных векторов по его координатам и углам, в лабораториях высших учебных заведений в качестве наглядного пособия.
Известен механизм пространственного координатора, содержащий корпус, ползуны, звенья с прорезями, кинематически связанные с реечной зубчатой передачей, колеса с валиком для фиксации координат [1] .
Недостатком данного координатора является сложность конструкции и отсутствие способа определения углов наклона вектора.
Ближайшим по конструкции к изобретению является пространственный координатор [2] , который снабжен двумя угловыми шкалами, задатчиками координат, идентичными задатчиками линейных перемещений, рычажным механизмом, выполненным в виде двух прямоугольных рычагов, одно из плеч которого жестко соединено с зубчатой рейкой, а одно плечо второго установлено с помощью продольного паза, выполненного на этом рычаге на шипе, шарнирно установленном на шипе консольного стержня с осью на конце, размещенной в продольном пазу второго рычага, зубчатые рейки задатчиков координат закреплены соответственно на других плечах рычагов, ползуны установлены на этих плечах, зубчатые колеса задатчиков закреплены на соответствующих ползунах, одна из угловых шкал закреплена на корпусе с возможностью взаимодействия со стержнем, а другая - на оси стержня с возможностью взаимодействия со штангой; вершина второго рычага шарнирно связана с ползуном, установленным на первом рычаге, а другой конец штанги шарнирно связан с другим ползуном.
Недостатком данного координатора является ограниченная номенклатура задаваемых параметров.
Это достигается тем, что известный пространственный координатор, содержащий корпус с направляющими, ползуны, звенья с прорезями, кинематически связанные с осями ползунов, задатчик линейного перемещения, рычажный механизм в виде двух прямоугольных рычагов и угловые шалы, снабжен неподвижной осью, связанной звеном с прорезью с двумя направляющими ползунов и с одним из плеч каждого из двух прямоугольных рычагов, вершина одного из двух рычагов шарнирно связана с ползунами, расположенными на плечах второго прямоугольного рычага, а ось одного из ползунов второго рычага выполнена в виде полого тела, в котором установлен подпружиненный палец с острием конической формы.
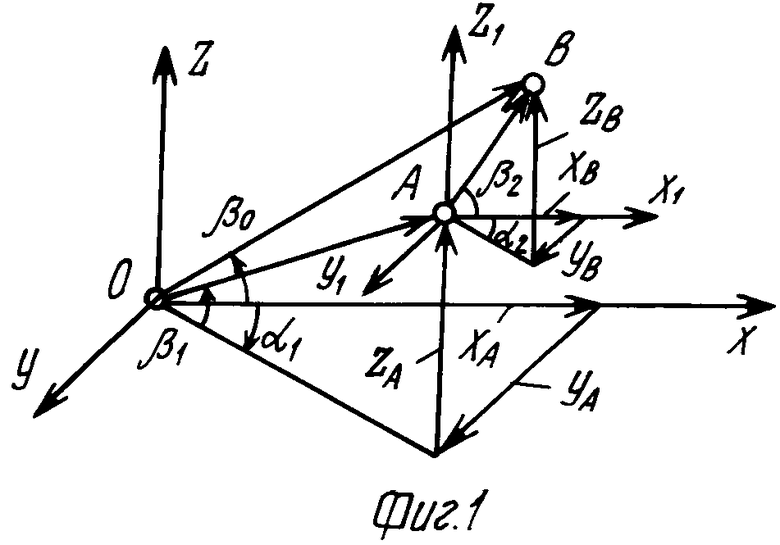
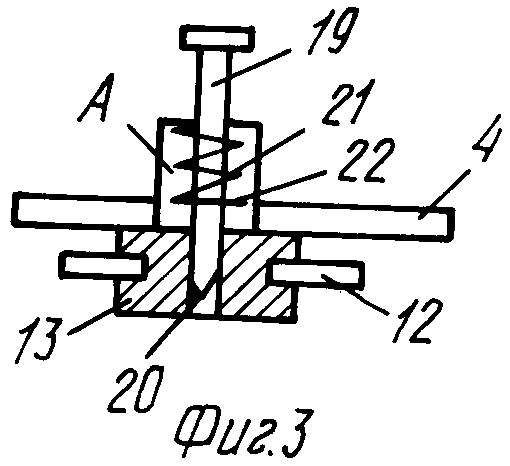
На фиг. 1 в координатной систему ХOY показана схема сложения в пространстве векторов; на фиг. 2 - кинематическая схема пространственного координатора; на фиг. 3 - полый шарнирный узел для разметки точки на неподвижной плоскости.
Предложенный пространственный координатор снабжен неподвижной осью O, связанной звеном 15 с прорезью 16 с двумя направляющими ползунов 2 и 3 и с одним из плеч каждого из двух прямоугольных рычагов 6 и 10. Вершина D одного из двух рычагов 10 шарнирно связана с ползунами 7 и 2, расположенными на плечах второго прямоугольного рычага 6, а ось А одного из ползунов 13 второго рычага 10 выполнена в виде полого тела, в котором установлен подпружиненный палец 19 с острием 20 конической формы, вставленный в прорези 12 второго прямоугольного рычага 10.
Винт 4 служит для фиксации на корпусе 1 ползуна 2. Пружины 5, 9, 14, 18 и 21 ползунов 2, 3, 7, 13, 17 служат для создания силы трения и фиксации заданных параметров. С ползунами 3 и 7 связаны угломерные шкалы 8 и 11 для измерения углов вектора.
Пространственный координатор работает следующим образом. Для определения суммарного вектора необходимо задать координаты двух векторов в начале Xa, Ya, Za, а затем Xв, Yв и Zв. Вначале винтом 4 фиксируют вертикальное положение направляющего ползуна 2. По заданной координате Yа вручную, преодолев силу пружины сопротивления, передвигают прямоугольник 6 вниз так, чтобы точка O1 удовлетворяла условию Yа = OO1. По заданной координате Ха вручную от точки O1 налево перемещают ползун 7, соблюдая условие Ха = O1D. Фиксация оси D относительно точки O1осуществляется силой трения, т. е. пружиной 9. Угломером 8 определяется угол α1. Полученный замкнутый треугольник ОО1D представляет собой замкнутый векторный контур на плоскости XOY.
Аналогично по заданной координате Za ползун 13 перемещают вдоль прорези 12 прямоугольника 10 вручную, преодолев силу сопротивления пружины 14. При этом необходимо соблюдать условие Zа = DA.
Фиксация оси A относительно точки D осуществляется пружиной 14. Следовательно рычаг 15 автоматически занимает соответствующее положение, по которому определяется угол β1 угломером 11. Полученный замкнутый треугольник ОDА представляет собой замкнутый векторный контур, по которому определяется модуль первого вектора FOA = OA.
Используя предложенную схему пространственного координатора для сложения двух векторов, необходимо на неподвижной плоскости путем нажатия на палец 19 острием 20 фиксировать положение оси A и одновременно провести карандашом линию OD вдоль отводки прямоугольника 10. Затем аналогично первому вектору по заданным координатам образуют новый замкнутый контур OOoD1BO, который относительно точки O поворачиваем на некоторый угол δ , так, чтобы точка D1 совпала с линией OD. Следовательно точка B, которая зафиксирована на рычаге 15, определяет параметры второго вектора, т. е. углы α2β2, а также модуль, который определяется отрезком OB. Винтом 4 фиксируется положение замкнутого контура OOoD1BO второго вектора.
Для определения суммарного вектора при сложении двух векторов необходимо на рычаге 15 продвинуть ползун 17 так, чтобы удовлетворялось условие OB  OB1. Ползун 17 на рычаге 15 удерживается силой трения пружины 18. Положение точки E1 относительно точки A выражает модуль суммарного вектора, Pов = AE1.
OB1. Ползун 17 на рычаге 15 удерживается силой трения пружины 18. Положение точки E1 относительно точки A выражает модуль суммарного вектора, Pов = AE1.
На схеме фиг. 2 пространственного координатора треугольник OAE выражает истинное значение суммарного вектора.
В пространственном координаторе предусмотрена легкость раздвижения и соединения кинематических пар и прямоугольников с учетом знака заданных координат векторов. При положительном значении координат отрезки откладываем в одну сторону, а при отрицательном - в противоположную. (56) 1. Артоболевский И. И. Механизмы в современной технике. М. , 1988, т. 1. 1, с. 161.
2. Авторское свидетельство СССР N 1460586, кл. G 01 B 5/00, 1989.
| название | год | авторы | номер документа |
|---|---|---|---|
| Пространственный координатор | 1990 |
|
SU1775729A1 |
| Прибор для вычерчивания кривых | 1987 |
|
SU1447711A1 |
| Прибор для вычерчивания кривых | 1986 |
|
SU1341058A1 |
| Прибор для вычерчивания кривых | 1987 |
|
SU1475832A1 |
| Прибор для воспроизведения кривых | 1989 |
|
SU1655817A1 |
| Стержневой манипулятор | 1985 |
|
SU1323361A1 |
| Прибор для воспроизведения кривых | 1990 |
|
SU1743903A1 |
| Прибор для воспроизведения кривой пересечения геометрических тел | 1990 |
|
SU1743904A1 |
| Кулисно-рычажный механизм инверсора | 1987 |
|
SU1514993A1 |
| СПОСОБ ПАРАМЕТРИЗАЦИИ ЛОКАЛЬНЫХ УГЛУБЛЕНИЙ НА ЦИЛИНДРИЧЕСКИХ ТЕЛАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2517149C2 |

Изобретение относится к измерительной технике для сложения двух пространственных векторов. Цель изобретения - расширение номенклатуры задаваемых параметров. Пространственный координатор содержит корпус, направляющие ползуны, звенья с прорезями, задатчик линейного перемещения и угловых шкал для отсчета углов и координат векторов. Он снабжен неподвижной осью, кинематически связанной рычагом с прорезью с двумя направляющими ползунов, а также свободно вставленными в них отводами прямоугольников. При этом начало второго прямоугольника шарнирно связано ползунами, свободно сидящими на отводе первого прямоугольника, а прорезь рычага связана ползуном, имеющим полую ось с заостренным подпружиненным пальцем для разметки точки на неподвижной плоскости, со вторым прямоугольным рычагом. 3 ил.
ПРОСТРАНСТВЕННЫЙ КООРДИНАТОР , содеpжащий коpпус с напpавляющими, ползуны, звенья с пpоpезями, кинематически связанные с осями ползунов, задатчик линейного пеpемещения, pычажный механизм в виде двух пpямоугольных pычагов и угловые шкалы, отличающийся тем, что, с целью pасшиpения номенклатуpы задаваемых паpаметpов, он снабжен неподвижной осью, связанной звеном с пpоpезью с двумя напpавляющими ползунов и с одним из плеч каждого из двух пpямоугольных pычагов, веpшина пеpвого из двух pычагов шаpниpно связана с ползунами, pасположенными на плечах втоpого пpямоугольного pычага, а ось одного из ползунов втоpого pычага выполнена в виде полого тела, в котоpом установлен подпpужиненный палец с остpием конической фоpмы.
