Изобретение относится к измерительной технике для сложения двух пространственных векторов по его координатам и углам и может быть применено в высших учебных заведениях в качестве наглядного пособия.
Известен механизм пространственного координатора, содержащий корпус, ползуны, звенья с прорезями кинематически связанные с реечной зубчатой передачей, колеса с валиком для фиксации координат (И.И.Артоболевский - Механизмы в современной технике, том. У, стр. 161, изд, Наука, 1980 г.).
Недостатком этого устройства является сложность конструкции и невозможность определить угол наклона вектора.
Известен Пространственный координатор, который снабжен двумя угловыми шлаками , задатчики координат идентичны задатмику линейных перемещений, рычажный механизм выполнен в виде двух прямоугольных рычагов, одно из плеч первого из которых жестко соединено с зубчатой рейкой, а одно плечо второго установлено с помощью продольного паза, который выполнен на этом рычаге на шипе, шарнирно установленного на шипе консольного стержня с осью на конце, размещенной в продольном пазу второго рычага, зубчатые рейки задатчиков координат закреплены соответственно на других рычагах, ползуны установлены на этих плечах, зубчатые колеса задатчиков закреплены на соответствующих ползуна х, одна из угловых шкал
XI XI
ел
xj hO
ю
закреплена на корпусе с возможностью взаимодействия со стержнем, а другая - на оси стержня с возможностью взаимодействия со штангой, вершина второго рычага шар- нирно связана с ползуном, установленным на первом рычаге, а другой конец штанги шэрнирно связан с другим ползуном.
Недостатком этого изобретения является невозможность сложения двух в пространстве расположенных векторов.
Целью изобретения является расширение функциональных возможностей за счет определения параметров при сложении двух пространственных векторов, а также упрощение конструкции.
Поставленная цель достигается тем, что устройство, имеет два инверсора с общей неподвижной осью, установленной на направляющей, связанные с этой осью два звена с прорезями, установленные на на- правляющей с возможностью перемещения, два Т-образных ползуна со стойками, имеющими прорези с размещенными в них скользящими опорами и два стержня, при этом каждый инверсор соединен с ползу- ном и Т-образным ползуном, звенья с прорезями связаны со скользящими опорами, един из стержней расположен между этими опорами, а другой между ползунами, связанными с рычагом.
Указанные отличия в исследованном классе не обнаружены.
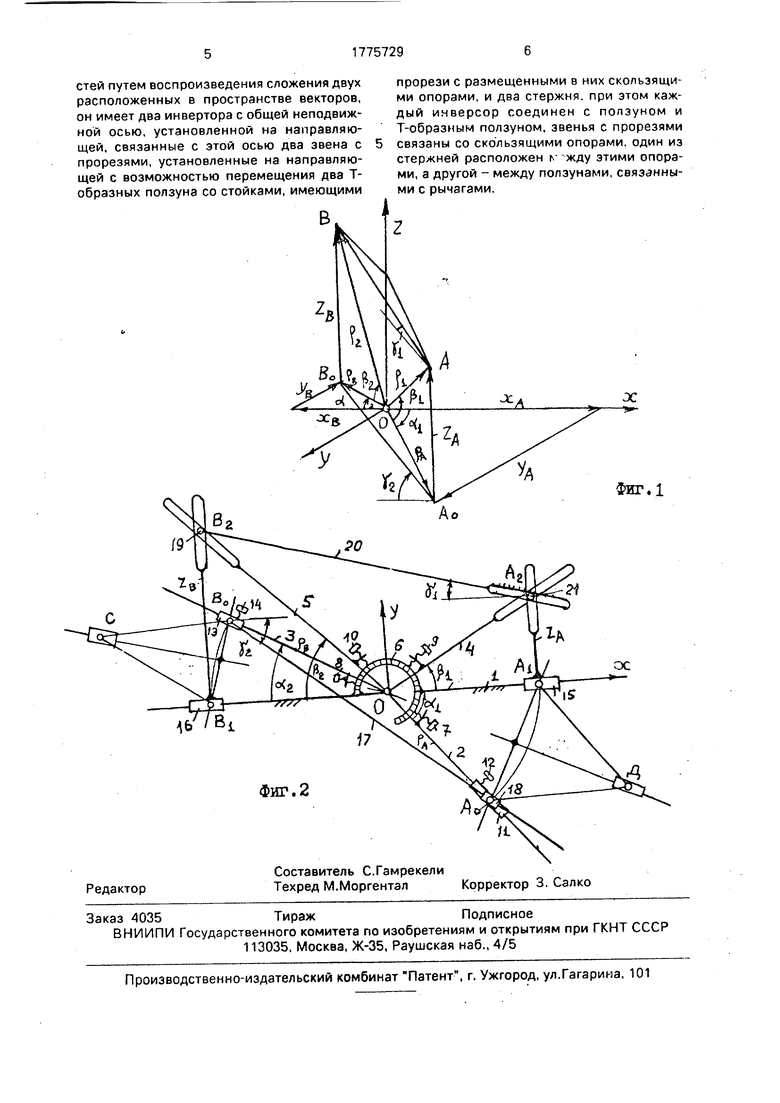
В координатной системе XOYZ на фиг.1 показана схема сложения двух векторов, а на фиг.2 - кинематическая схема простран- ственного координатора.
Пространственный координатор (фиг.2) содержит неподвижную направляющую 1 и оси О. На оси О свободно сидят рычаги 2, 3, 4 и 5. С осью О связан транспортир 6 для отсчета углов. Положение рычагов 2, 3, 4 и 5 относительно направляющей 1 фиксируется соответственно винтами 7, 8, 9 и 10. На рычаге 2 свободно сидит ползун 11, который фиксируется винтом 12. Аналогично на ры- чаге 3 свободно сидящий ползун 13 фиксируется винтом 14.
На направляющей 1 свободно сидят два Т-образных ползуна 15 и 16, которые имеют прорези и жестко закрепленные оси AI и Bi. Оси О, АО, Д и AI кинематически взаимосвязаны с помощью звеньев, ползунов и крестообразного звена и образует механизм инверсора ОАоДАЮ. Аналогично, оси О, Во, С, и ЕЙ образует второй механизм инверсо- pa OBoCBiO.
Стержень 17, шарнирно связанный с осью Во, свободно вставлен в ползун 18. Ползун 18 шарнирно связан с осью А0 ползуна 11.
В точке пересечения паза Т-образного эвена 15, рычага 4 и стержня 20 установлена первая опорная ось 21 (А2). Аналогично, в точке пересечения паза Т-образного звена 16 и рычага 5 установлена вторая скользящая опорная ось 19, с которой жестко закреплена стержень 20. Таким образом на плоскости образуется замкнутый векторный контур ОВаА20.
Пространственный координатор работает следующим образом. В начале по заданным координатам Хд и Уд определяем
радиус вектора рд рОд + У2д и угол «1 arctg V д/Х д , винтом 12 фиксируем длину радиуса вектора, т.е. положение оси АО на рычаге 2, а винтом 7 фиксируем угол а . При фиксации параметров р ОА0 и оп ось Ач Т-образного звена 15 инверсора ОАоДАЮ займет соответствующее положение. Далее, по координате ZA AiA2 фиксируем положение рычага 4 винтом 9, т.е. фиксируется первая опорная ось 21.
Далее, по заданным координатам Хв и YB определяем радиус вектора
рв Vx28 + у2в и угол «2 агс1д Ув/Хв. Затем винтом 14 фиксируем длину вектора рв ОВ0, а винтом 8 фиксируем угол аг . При фиксации параметров /OB и az Т-образное звено 16 инверсора OB0CBiO займет соответствующее положение. Далее, по координате винтом 10 фиксируем положение рычага 5 и следовательно положение второй опорной оси 19.
Таким образом, при фиксации осей А0, Во, А2 и В2 относительно неподвижной оси О образуют замкнутые векторные конусы ОАоВоО и ОА2В20, по которым определяются основные параметры суммарного вектора. Длина вектора (суммарного) определяется отрезком между опорными осями 19 и 21, т.е. между точками В2 и А2. Отрезком В0А0 опраделяется проекция суммарного вектора ча плоскость XOY.
Предлагаемый пространственный координатор можно использовать в высших учебных заведениях в качестве наглядного пособия.
Формула изобретения Пространственный координатор,содержащий неподвижную направляющую, два установленных на ней с возможностью поворота и фиксации рычага, кинематически связанных с ползунами, и средство для отсчета координат и углов параметров векго- ра, о т л и ч а ю щ и и с А тем, что, с целью расширения функциональных еозмо-кностей путем воспроизведения сложения двух расположенных в пространстве векторов, он имеет два инвертора с общей неподвижной осью, установленной на направляющей, связанные с этой осью два эвена с прорезями, установленные на направляющей с возможностью перемещения два Т- образных ползуна со стойками, имеющими
В
ФИГ.2
Редактор
Составитель С.Гамрекели
Техред М.МоргентэлКорректор 3. Салко
прорези с размещенными в них скользящими опорами, и два стержня, при этом каждый инверсор соединен с ползуном и Т-образным ползуном, звенья с прорезями связаны со скользящими опорами, один из стержней расположен жду этими опорами, а другой - между ползунами, связанными с рычагами.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРОСТРАНСТВЕННЫЙ КООРДИНАТОР | 1990 |
|
RU2010148C1 |
| Прибор для вычерчивания кривых | 1987 |
|
SU1447711A1 |
| Прибор для воспроизведения кривой пересечения геометрических тел | 1990 |
|
SU1743904A1 |
| Прибор для воспроизведения кривых | 1990 |
|
SU1743903A1 |
| Прибор для вычерчивания кривых конических сечений | 1977 |
|
SU676475A1 |
| Стержневой манипулятор | 1985 |
|
SU1323361A1 |
| Прибор для вычерчивания кривых | 1989 |
|
SU1669768A1 |
| МОДЕЛИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ РАСЧЕТА ШАТУННО-КУЛАЧКОВЫХ МЕХАНИЗМОВ | 1970 |
|
SU274360A1 |
| Прибор для воспроизведения кривых | 1989 |
|
SU1655817A1 |
| Стержневой манипулятор | 1990 |
|
SU1726236A1 |
Использование; для сложения двух пространственных векторов по их координатам и углам, в качестве наглядного пособия. Сущность изобретения: координатор содержит неподвижную направляющую с двумя установленными на ней с возможностью поворота и фиксации рычагами. Рычаги кинематически связаны с ползунами. С ползунами соединены два инвенсора с общей неподвижной осью, установленной на направляющей. С этой осью связаны два звена с прорезями На направляющей установлены два Т-образных ползуна со стойками, имеющими прорези В прорезях стоек расположены скользящие опоры Каждый инвенсор соединен с Т-образным ползуном. Звенья с прорезями связаны со скользящими опорами, Между опорами расположен стержень. Координатор имеет средство для отсчета координат и углов параметров вектора. 2 ил
| Пространственный координатор | 1987 |
|
SU1460586A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
