Изобретение относится к измерительной технике и может быть использовано для измерения перемещений и деформаций объектов, подверженных температурным, упругим и другим деформациям.
Известно устройство для измерения перемещений и деформаций, содержащее пять датчиков перемещений, три из которых установлены на общей платформе так, что первый и второй включены дифференциально, а третий, включенный дифференциально первому, смещен относительно второго на известное расстояние, пять измерительных преобразователей, каждый из которых соединен с соответствующим датчиком, три блока деления, два блока умножения, два блока вычитания, один блок сложения, выход первого блока деления соединен с первыми входами первого и второго блоков умножения, выход первого блока вычитания соединен с первым входом второго блока деления, второй вход которого объединен с вторым входом третьего блока деления и подключен к выходу второго блока вычитания, выход второго блока деления подключен к второму входу первого блока умножения, выход первого блока сложения подключен к первому входу третьего блока деления, выход которого подключен к второму входу второго блока умножения, а выход первого блока умножения является первым выходом устройства.
Недостатком известного устройства является недостаточная точность измерения из-за деформации платформы, на которой установлены датчики.
Цель изобретения - повышение точности измерения за счет уменьшения погрешности от изменения расстояния между противолежащими датчиками из-за деформации платформы.
Поставленная цель достигается тем, что в известном устройстве платформа выполнена П-образной, состоящей из двух полок и перекладины, первый датчик перемещения установлен на торце одной из полок, второй и третий - на торце другой полки, четвертый и пятый датчики перемещения закреплены независимо друг от друга и от платформы на одинаковом расстоянии от взаимно параллельных поверхностей полок платформы, один с внутренней, другой с внешней стороны соответствующей полки и включены оба согласно или оба встречно первому или второму и третьему датчикам, а устройство снабжено третьим и четвертым блоками вычитания, вторым и третьим блоками сложения, четвертым блоком деления, третьим блоком умножения и блоком удвоения, выход первого измерительного преобразователя подключен к вычитающему входу первого блока вычитания, первому входу первого блока сложения и первому входу первого блока деления, выход второго измерительного преобразователя подключен к суммирующим входам первого и второго блоков вычитания и второму входу первого блока сложения, выход третьего измерительного преобразователя подключен к второму входу первого блока деления и вычитающему входу второго блока вычитания, выход четвертого измерительного преобразователя подключен к вычитающему входу третьего блока вычитания и первому входу второго блока сложения, к второму входу которого и суммирующему входу третьего блока вычитания подключен выход пятого измерительного преобразователя, выходы третьего блока вычитания и второго блока сложения подключены к входам четвертого блока деления, выход которого подключен к первому входу третьего блока умножения, к второму входу которого подключен второй выход блока памяти, третий выход которого и выход третьего блока умножения подключены к входам третьего блока сложения, выход которого подключен к суммирующему входу четвертого блока вычитания, к вычитающему входу которого подключен выход второго блока умножения, а выход четвертого блока вычитания подключен к входу блока удвоения, выход которого является вторым выходом устройства.
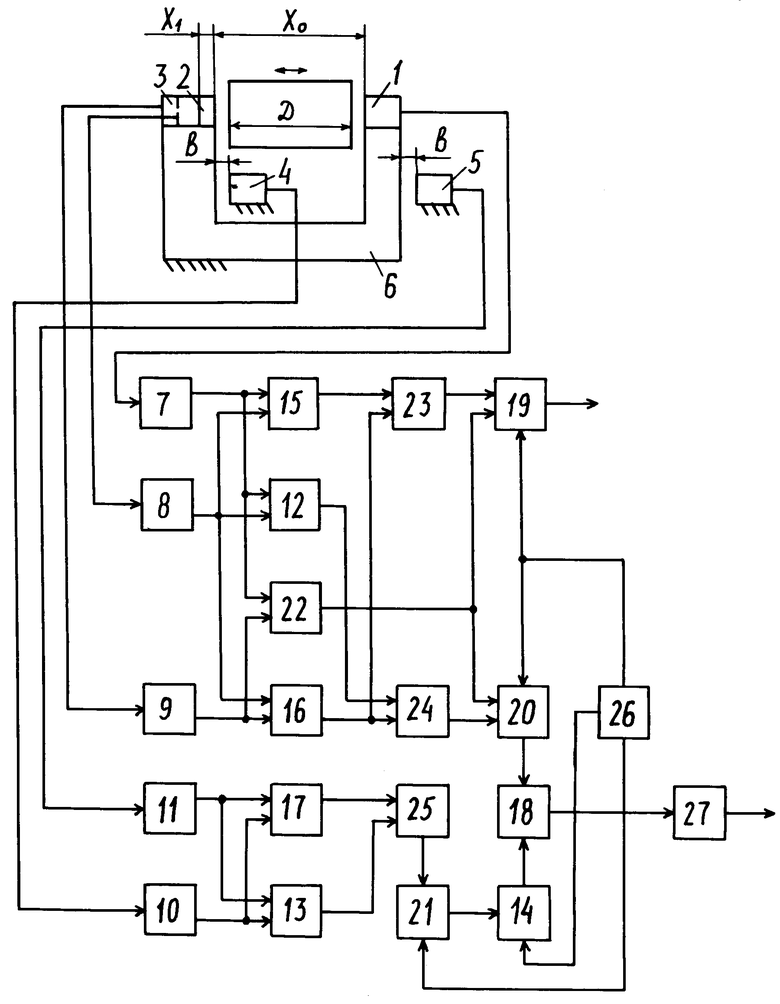
На чертеже приведена блок-cхема предлагаемого устройства.
Устройство содержит пять идентичных датчиков 1-5 перемещения. Три датчика 1-3 установлены дифференциально несимметрично на общей платформе 6, а два датчика 4 и 5 закреплены независимо друг от друга и от платформы 6 на одинаковом расстоянии от взаимно параллельных поверхностей полок платформы 6, датчик 4 - с внутренней, датчик 5 - с внешней стороны соответствующей полки и включены оба согласно или оба встречно первому 1 или второму 2 и третьему 3 датчикам. Устройство содержит также пять идентичных измерительных преобразователей 7-11, три блока 12-14 сложения, четыре блока 15-18 вычитания, три блока 19-21 умножения, четыре блока 22-25 деления, блок 26 памяти и блок 27 удвоения. Выход первого преобразователя 7 первого датчика 1 подключен к вычитающему входу первого блока 15 вычитания и первым входам первых блоков 12 и 22. Выход второго преобразователя 8 второго датчика 2 подключен к суммирующим входам первого и второго блоков 15 и 16 вычитания и второму входу первого блока 12 сложения. Выход третьего преобразователя 9 третьего датчика 3 подключен к второму входу первого блока 22 деления и вычитающему входу второго блока 16 вычитания. Выход четвертого преобразователя 10 четвертого датчика 4 подключен к вычитающему входу третьего блока 17 вычитания и первому входу второго блока 13 сложения. Выход пятого преобразователя 11 пятого датчика 5 подключен к суммирующему входу третьего блока 17 вычитания и второму входу второго блока 13 сложения. Выход первого блока 15 вычитания подключен к первому входу второго блока 23 деления, к второму входу которого и второму входу третьего блока 24 деления подключен выход второго блока 16 вычитания, а к первому входу третьего блока 24 деления подключен выход первого блока 12 сложения. Выходы второго и третьего блоков 23 и 24 деления подключены соответственно к первым входам первого и второго блоков 19 и 20 умножения, к вторым входам которых подключен выход первого блока 22 деления, а к третьим входам - первый выход блока 26 памяти. Выход первого блока 19 умножения является первым выходом устройства. Выходы третьего блока 17 вычитания и второго блока 13 сложения подключены к входам четвертого блока 25 деления, выход которого подключен к первому входу третьего блока 21 умножения, к второму входу которого подключен второй выход блока 26 памяти, третий выход которого и выход третьего блока 21 умножения подключены к входам третьего блока 14 сложения, выход которого подключен к суммирующему входу четвертого блока 18 вычитания, к вычитающему входу которого подключен выход второго блока 20 умножения, а выход четвертого блока 18 вычитания подключен к входу блока 27 удвоения, выход которого является вторым выходом устройства.
Устройство работает следующим образом.
При перемещении и деформации контролируемого объекта сигналы на выходах измерительных преобразователей 7-11 определяются соответственно выражениями
Y1= 
(1)
Y2= 
(2) Y3= 
(3) Y4= 
(4) Y5= 
(5) где К - коэффициент пропорциональности, зависящий от влияющих факторов, который вследствие идентичности датчиков 1-5 и измерительных преобразователей 7-11 для всех каналов меняется одинаково;
а = (Хo-D)/2, где Хo - номинальное расстояние между противолежащими датчиками 1 и 2, D - номинальная толщина контролируемого объекта;
Δ Хo - отклонение расстояния между противолежащими датчиками 1 и 2 от номинального Хo из-за деформации платформы 6;
Δ D - отклонение толщины контролируемого объекта от номинальной D из-за тепловых, упругих и других деформаций;
Х1 - взаимное образцовое смещение второго 2 и третьего 3 датчиков перемещения относительно друг друга;
Δ Х - перемещение контролируемого объекта относительно начального положения;
b - начальное расстояние от датчиков 4 и 5 до соответствующей поверхности платформы 6, на которой закреплены датчики 1-3;
Δ Х01 - перемещение соответствующей поверхности платформы 6 относительно датчика 4 из-за деформации платформы;
Δ Х02 - перемещение соответствующей поверхности платформы 6 относительно датчика 5 из-за деформации платформы;
Δ Хo = Δ Х01 + Δ Х02.
В частном случае в устройстве может быть реализовано и использовано следующее соотношение: а = b.
Сигналы с выходов первого 7 и второго 8 преобразователей поступают на входы первого блока 15 вычитания, на выходе которого получаем сигнал
Y2-Y1= 
(6)
Сигналы с выходов второго 8 и третьего 9 преобразователей поступают на входы второго блока 16 вычитания, на выходе которого получаем
Y2-Y3= 
(7)
Сигналы с выходов первого 7 и третьего 9 преобразователей поступают на входы первого блока 22 деления, на выходе которого получаем =
= 
(8)
Сигналы (6) и (7) с выходов первого 15 и второго 16 блоков вычитания поступают на входы второго блока 23 деления, на выходе которого сигнал становится равным =
=  ·
· 
(9)
Сигналы (8) и (9) с выходов соответственно первого 22 и второго 23 блоков деления, а также сигнал Х1/2 с выхода блока 26 памяти поступают на входы первого блока 19 умножения. В результате, на его выходе получают сигнал
ΔX =  ·
·  ·
· 
(10) характеризующий перемещение контролируемого объекта относительно начального положения.
Сигналы с выходов первого 7 и второго 8 преобразователей поступают на входы первого блока 12 сложения, на выходе которого сигнал становится равным
Y2+Y1= 
(11)
Этот сигнал, а также сигнал (7) с выхода второго блока 16 вычитания поступают на входы третьего блока 24 деления, на выходе которого получаем =
=  ·
· 
(12)
Сигнал (12), а также сигналы (8) с выхода первого блока 22 деления и Х1/2 с первого выхода блока 26 памяти поступают на входы второго блока 20 умножения, на выходе которого получают ·
·  ·
·  =
=  a+
a+  -
- 
(13)
который поступает на вычитающий вход четвертого блока 18 вычитания.
Сигналы с выходов четвертого 10 и пятого 11 преобразователей поступают на входы третьего блока 17 вычитания и второго блока 13 сложения, на выходах которых соответственно получают сигналы
Y5-Y4= 
(14)
Y5+Y4= 
(15) которые поступают на входы четвертого блока 25 деления, на выходе которого получают  =
=  =
= 
(16)
Этот сигнал и сигнал b с второго выхода блока 26 памяти поступают на входы третьего блока 21 умножения, на выходе которого получают
b ·  =
= 
(17)
Сигнал (17) и сигнал а с третьего выхода блока 26 памяти поступают на входы третьего блока 14 сложения, сигнал с выхода которого a+b·
a+b·  = a+
= a+ 
(18) поступает на суммирующий вход четвертого блока 18 вычитания, на выходе которого получают  a+b ·
a+b ·  -
-  ·
·  ·
·  =
= 
(19)
Этот сигнал поступает на вход блока 27 удвоения, сигнал на выходе которого
ΔD = 2 a+b ·
a+b ·  -
-  ·
·  ·
· 
(20) характеризует отклонение толщины контролируемого объекта от номинальной вследствие температурных, упругих и других деформаций.
Величина Х1 - постоянная для данного устройства, обеспечивается достаточно легко вследствие небольшого ее значения. Величина а обеспечивается номинальными размерами платформы 6 и контролируемого объекта. Величина b обеспечивается при установке датчиков 4 и 5. Величина Δ Х в соответствие с выражением (10) определяет перемещение контролируемого объекта относительно начального положения и не содержит погрешности от изменения под действием влияющих факторов коэффициентов К, деформаций Δ D и Δ Хo соответственно контролируемого объекта и платформы 6.
Величина Δ D, определяющая в соответствие с выражением (20) деформацию контролируемого объекта, не содержит погрешности от изменения под действием влияющих факторов коэффициентов К и деформации Δ Хo платформы 6 с датчиками 1-3. (56) Авторское свидетельство СССР N 1663396, кл. G 01 B 7/00, 1989.
Изобретение относится к измерительной технике и может быть использовано для измерения перемещений и деформаций объектов, подверженных температурным, упругим и другим деформациям. Цель изобретения - повышение точности измерения за счет уменьшения погрешности от изменения расстояния между противолежащими датчиками. Устройство содержит пять идентичных датчиков перемещения, три из которых установлены дифференциально несимметрично на общей платформе так, что два из них, первый и второй, включены дифференциально, а третий, установленный дифференциально второму, смещен относительно первого на известное расстояние, а два других, четвертый и пятый, закреплены независимо друг от друга и от платформы на одинаковом расстоянии от ее поверхности, пять идентичных измерительных преобразователей, три блока сложения, четыре блока вычитания, три блока умножения, четыре блока деления, блок памяти и блок удвоения. 1 ил.
УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ПЕРЕМЕЩЕНИЙ И ДЕФОРМАЦИЙ, содержащее пять датчиков перемещений, три из которых установлены на общей платформе так, что первый и второй включены дифференциально, а третий, включенный дифференциально первому, смещен относительно второго на известное расстояние, пять измерительных преобразователей, каждый из которых соединен с соответствующим датчиком, три блока деления, два блока умножения, два блока вычитания, один блок сложения, выход первого блока деления соединен с первыми входами первого и второго блоков умножения, выход первого блока вычитания соединен с первым входом второго блока деления, второй вход которого соединен с вторым входом третьего блока деления и подключен к выходу второго блока вычитания, выход второго блока деления подключен к второму входу первого блока умножения, выход первого блока сложения подключен к первому входу третьего блока деления, выход которого подключен к первому входу третьего блока деления, выход которого подключен к второму входу второго блока умножения, а выход первого блока умножения является первым выходом устройства, отличающееся тем, что, с целью повышения точности измерений, платформа выполнена П-образной, состоящей из двух полок и перекладины, первый датчик перемещения установлен на торце одной из полок, второй и третий - на торце другой полки, четвертый и пятый датчики перемещения закреплены независимо друг от друга и от платформы на одинаковом расстоянии от взаимно параллельных поверхностей полок платформы, один с внутренней, другой с внешней стороны соответствующей полки, и включены оба согласно или оба встречно первому или второму и третьему датчикам, а устройство снабжено третьим и четвертым блоками вычитания, вторым и третьим блоками сложения, четвертым блоком деления, третьим блоком умножения и блоком удвоения, выход первого измерительного преобразователя подключен к вычитающему входу первого блока вычитания, первому входу первого блока сложения и первому входу первого блока деления, выход второго измерительного преобразователя подключен к суммирующим входам первого и второго блоков вычитания и второму входу первого блока сложения, выход третьего измерительного преобразователя подключен к второму входу первого блока деления и вычитающему входу второго блока вычитания, выход четвертого измерительного преобразователя подключен к вычитающему входу третьего блока вычитания и первому входу второго блока сложения, к второму входу которого и суммирующему входу третьего блока вычитания подключен выход пятого измерительного преобразователя, выход третьего блока вычитания и второго блока сложения подключены к входам четвертого блока деления, выход которого подключен к первому входу третьего блока умножения, к второму входу которого подключен второй выход блока памяти, третий выход которого и выход третьего блока умножения подключены к входам третьего блока сложения, выход которого подключен к суммирующему входу четвертого блока вычитания, к вычитающему входу которого подключен выход второго блока умножения, а выход четвертого блока вычитания подключен к входу блока удвоения, выход которого является вторым выходом устройства.
