Изобретение относится к измерительной технике и может быть использовано для измерения перемещений, деформаций и поворотов многомерных объектов в результате, например, тепловых и упругих возмущений.
Известно множество измерительных устройств, реализующих алгоритмический метод измерения перемещений объектов, подверженных тепловым и упругим деформациям. Например, устройство [1], где в результате использования шести измерительных каналов получают величины, характеризующие линейные перемещения и деформации объекта вдоль одной координатной оси, а также поворот контролируемого объекта относительно другой оси.
Недостатком известного устройства является сложность и высокая методическая погрешность из-за большого количества измерительных каналов.
Наиболее близким аналогом заявленного устройства является информационно-измерительная система [2] перемещений и деформаций объекта, где в результате использования четырех измерительных каналов получают величины, характеризующие линейные перемещения и деформации объекта вдоль одной координатной оси, а также поворот контролируемого объекта относительно другой оси.
Действительно, если в соответствии с [2] выходные сигналы четырех измерительных каналов аппроксимируются системой уравнений:
где k - чувствительность измерительных каналов;
x0 - начальное расстояние от датчиков до контролируемого объекта, установленных дифференциально;
Δх1 - компонента, характеризующая линейное перемещение точки контролируемого объекта, принятой за полюс (в данном случае принят центр объекта);
Δx2 - компонента, характеризующая линейную деформацию контролируемого объекта между его крайними точками;
Δx3 - компонента, характеризующая поворот контролируемого объекта,
то на выходе блока обработки получаем сигналы, характеризующие названные компоненты и инвариантные относительно возмущений со стороны контролируемого объекта:


К недостаткам известного устройства можно отнести ограниченные функциональные возможности из-за отсутствия измерения перемещений и деформаций объекта в направлении второй координатной оси декартовой системы координат.
Сущность изобретения заключается в том, что в известном устройстве, содержащем четыре датчика линейных перемещений, подключенных к соответствующим измерительным преобразователям, чувствительные элементы двух из которых ориентированы относительно контролируемого объекта дифференциально, коллинеарно первой из выбранных координатных осей, включающем в себя шесть блоков сложения, четыре блока вычитания, шестнадцать блоков умножения, пять блоков деления и блок памяти, датчики расположены попарно диаметрально противоположно относительно контролируемого объекта. Причем, вторая пара датчиков содержит по паре взаимно ортогонально установленных чувствительных элемента, два из которых, ориентированных дифференциально относительно контролируемого объекта и коллинеарно относительно второй координатной оси, подключены к дополнительным измерительным преобразователям, а два других чувствительных элемента этой же пары датчиков ориентированы в одну сторону коллинеарно первой координатной оси. В блок обработки информации введены четыре блока сложения, одиннадцать блоков умножения, два блока деления. Выход первого измерительного преобразователя, соединенного с выходом первого датчика первой пары датчиков, подключен к прямому входу первого блока вычитания и первому входу первого блока умножения. Выход второго измерительного преобразователя, соединенного с выходом второго датчика первой пары датчиков, подключен к инверсному входу первого блока вычитания, второму входу первого блока умножения и первому входу второго блока умножения. Выход третьего измерительного преобразователя, соединенного с чувствительным элементом первого датчика второй пары, ориентированным коллинеарно первой координатной оси, подключен к первому входу первого блока сложения, инверсному входу второго блока вычитания и первому входу третьего блока умножения. Выход четвертого измерительного преобразователя, соединенного с чувствительным элементом второго датчика второй пары, ориентированным коллинеарно первой координатной оси, подключен ко второму входу первого блока сложения, прямому входу второго блока вычитания и второму входу третьего блока умножения. Выход пятого измерительного преобразователя, соединенного со вторым чувствительным элементом первого датчика второй пары, ориентированным коллинеарно второй координатной оси, подключен к первому входу второго блока сложения, к прямому входу третьего блока вычитания и первому входу четвертого блока умножения. Выход шестого измерительного преобразователя, соединенного со вторым чувствительным элементом второго датчика второй пары, ориентированным коллинеарно второй координатной оси, подключен ко второму входу второго блока сложения, инверсному входу третьего блока вычитания и второму входу четвертого блока умножения. Выход четвертого блока умножения соединен с первым входом пятого блока умножения, первым входом шестого блока умножения, первым входом седьмого блока умножения, выход третьего блока вычитания соединен с первым входом девятого блока умножения. Выход третьего блока умножения соединен со вторым входом восьмого блока умножения, со вторым входом второго блока умножения, со вторым входом шестого блока умножения, вторым входом девятого блока умножения и третьим входом десятого блока умножения. Выход первого блока умножения соединен с третьим входом девятого блока умножения, со вторым входом десятого блока умножения, со вторым входом пятого блока умножения, с первым входом одиннадцатого блока умножения, со вторым входом двенадцатого блока умножения, со вторым входом тринадцатого блока умножения. Второй выход блока памяти соединен с четвертым входом девятого блока умножения, со вторым входом четырнадцатого блока умножения, с первым входом тринадцатого блока умножения, выход первого блока сложения соединен со вторым входом одиннадцатого блока умножения, с первым входом двенадцатого блока умножения, с третьим входом пятого блока умножения. Выход пятого блока умножения соединен со вторым входом пятого блока сложения, выход первого блока вычитания соединен с первым входом восьмого блока умножения, с третьим входом шестого блока умножения. Выход шестого блока умножения соединен с первым входом пятого блока сложения. Выход второго блока сложения соединен с первым входом десятого блока умножения, выход десятого блока умножения соединен с инверсным входом четвертого блока вычитания, выход пятого блока сложения соединен со вторым входом четвертого блока вычитания. Выход четвертого блока вычитания соединен с первым входом шестнадцатого блока умножения, третий выход блока памяти соединен со вторым входом пятнадцатого блока умножения, со вторым входом шестнадцатого блока умножения. Выход шестнадцатого блока умножения соединен со входом делимого второго блока деления. Выход восьмого блока умножения соединен с первым входом третьего блока сложения, первым входом четвертого блока сложения, с первым входом четырнадцатого блока умножения, выход которого соединен со входом делимого третьего блока деления. Выход двенадцатого блока умножения соединен с первым входом шестого блока сложения, со вторым входом четвертого блока сложения. Выход четвертого блока сложения соединен со вторым входом седьмого блока умножения. Выход девятого блока умножения соединен со входом делимого первого блока деления. Выход седьмого блока умножения соединен со входом делителя первого блока деления, со входом делителя второго блока деления. Выход одиннадцатого блока умножения соединен со вторым входом третьего блока сложения. Выход третьего блока сложения соединен со входом делителя третьего блока деления, со входом делителя четвертого блока деления, со входом делителя пятого блока деления. Первый выход блока памяти соединен с третьим входом второго блока умножения. Выход второго блока умножения соединен со вторым входом шестого блока сложения. Выход шестого блока сложения соединен с первым входом пятнадцатого блока умножения, выход которого соединен со входом делимого четвертого блока деления. Выход второго блока вычитания соединен с третьим входом тринадцатого блока умножения. Выход тринадцатого блока умножения соединен со входом делимого пятого блока деления. Выход первого блока деления является первым выходом системы, выход второго блока деления является вторым выходом системы, выход третьего блока деления является третьим выходом системы, выход четвертого блока деления является четвертым выходом системы, выход пятого блока деления является пятым выходом системы.
В результате расширяются функциональные возможности, повышается в определенном случае точность измерения.
На чертеже приведена блок-схема информационно-измерительной системы перемещений и деформаций объекта.
Устройство содержит четыре датчика 1-4 линейных перемещений, подключенных к соответствующим измерительным преобразователям 5-10, чувствительные элементы двух из которых 1, 3 ориентированы относительно контролируемого объекта дифференциально, коллинеарно первой из выбранных координатных осей, и блок обработки информации, включающий в себя шесть блоков 11-16 сложения, четыре блока 17-20 вычитания, шестнадцать блоков 21-36 умножения, пять блоков 37-41 деления и блок 42 памяти. Датчики расположены попарно диаметрально противоположно относительно контролируемого объекта, причем вторая пара датчиков 2 и 4 содержит по паре взаимно ортогонально установленных чувствительных элемента, два из которых, ориентированных дифференциально относительно контролируемого объекта и коллинеарно относительно второй координатной оси, подключены к дополнительным измерительным преобразователям 9 и 10, а два других чувствительных элемента этой же пары датчиков 2 и 4 ориентированы в одну сторону коллинеарно первой координатной оси, причем выход первого измерительного преобразователя 5, соединенного с выходом первого датчика 1 первой пары датчиков 1 и 2, подключен к прямому входу первого блока 17 вычитания и первому входу первого блока 21 умножения, выход второго измерительного преобразователя 6, соединенного с выходом второго датчика 2 первой пары датчиков 1 и 2, подключен к инверсному входу первого блока 17 вычитания, второму входу первого блока 21 умножения и первому входу второго блока 22 умножения, выход третьего измерительного преобразователя 7, соединенного с чувствительным элементом первого датчика 2 второй пары датчиков 2 и 4, ориентированным коллинеарно первой координатной оси, подключен к первому входу первого блока 11 сложения, инверсному входу второго блока 18 вычитания и первому входу третьего блока 23 умножения, выход четвертого измерительного преобразователя 8, соединенного с чувствительным элементом второго датчика 4 второй пары датчиков 2 и 4, ориентированным коллинеарно первой координатной оси, подключен ко второму входу первого блока 11 сложения, прямому входу второго блока 18 вычитания и второму входу третьего блока 23 умножения, выход пятого измерительного преобразователя 9, соединенного со вторым чувствительным элементом первого датчика 2 второй пары датчиков 2 и 4, ориентированным коллинеарно второй координатной оси, подключен к первому входу второго блока 12 сложения, к прямому входу третьего блока 19 вычитания и первому входу четвертого блока 24 умножения, выход шестого измерительного преобразователя 10, соединенного со вторым чувствительным элементом второго датчика 4 второй пары датчиков 2 и 4, ориентированным коллинеарно второй координатной оси, подключен ко второму входу второго блока 12 сложения, инверсному входу третьего блока 19 вычитания и второму входу четвертого блока 24 умножения, выход четвертого блока 24 умножения соединен с первым входом пятого блока 25 умножения, первым входом шестого блока 26 умножения, первым входом седьмого блока 27 умножения, выход третьего блока 19 вычитания соединен с первым входом девятого блока 29 умножения, выход третьего блока 23 умножения соединен со вторым входом восьмого блока 28 умножения, со вторым входом второго блока 22 умножения, со вторым входом шестого блока 26 умножения, вторым входом девятого блока 29 умножения и третьим входом десятого блока 30 умножения, выход первого блока 21 умножения соединен с третьим входом девятого блока 29 умножения, со вторым входом десятого блока 30 умножения, со вторым входом пятого блока 25 умножения, с первым входом одиннадцатого блока 31 умножения, со вторым входом двенадцатого блока 32 умножения, со вторым входом тринадцатого блока 33 умножения, второй выход блока 42 памяти соединен с четвертым входом девятого блока 29 умножения, со вторым входом четырнадцатого блока 34 умножения, с первым входом тринадцатого блока 33 умножения, выход первого блока 11 сложения соединен со вторым входом одиннадцатого блока 31 умножения, с первым входом двенадцатого блока 32 умножения, с третьим входом пятого блока 25 умножения, выход пятого блока 25 умножения соединен со вторым входом пятого блока 15 сложения, выход первого блока 17 вычитания соединен с первым входом восьмого блока 28 умножения, с третьим входом шестого блока 26 умножения, выход шестого блока 26 умножения соединен с первым входом пятого блока 15 сложения, выход второго блока 12 сложения соединен с первым входом десятого блока 30 умножения, выход десятого блока 30 умножения соединен с инверсным входом четвертого блока 20 вычитания, выход пятого блока 15 сложения соединен со вторым входом четвертого блока 20 вычитания, выход четвертого блока 20 вычитания соединен с первым входом шестнадцатого блока 36 умножения, третий выход блока 42 памяти соединен со вторым входом пятнадцатого блока 35 умножения, со вторым входом шестнадцатого блока 36 умножения, выход шестнадцатого блока 36 умножения соединен со входом делимого второго блока 38 деления, выход восьмого блока 28 умножения соединен с первым входом третьего блока 13 сложения, первым входом четвертого блока 14 сложения, с первым входом четырнадцатого блока 34 умножения, выход которого соединен со входом делимого третьего блока 39 деления, выход двенадцатого блока 32 умножения соединен с первым входом шестого блока 16 сложения, со вторым входом четвертого блока 14 сложения, выход четвертого блока 14 сложения соединен со вторым входом седьмого блока 37 умножения, выход девятого блока 29 умножения соединен со входом делимого первого блока 37 деления, выход седьмого блока 27 умножения соединен со входом делителя первого блока 37 деления, со входом делителя второго блока 38 деления, выход первого блока 37 деления является первым выходом системы, выход второго блока 38 деления является вторым выходом системы, выход одиннадцатого блока 31 умножения соединен со вторым входом третьего блока 13 сложения, выход третьего блока 13 сложения соединен со входом делителя третьего блока 39 деления, со входом делителя четвертого блока 40 деления, со входом делителя пятого блока 41 деления, выход третьего блока 39 деления является третьим выходом системы, первый выход блока 42 памяти соединен с третьим входом второго блока 22 умножения, выход второго блока 22 умножения соединен со вторым входом шестого блока 16 сложения, выход шестого блока 16 сложения соединен с первым входом пятнадцатого блока 35 умножения, выход которого соединен со входом делимого четвертого блока 40 деления, выход четвертого блока 40 деления является четвертым выходом системы, выход второго блока 18 вычитания соединен с третьим входом тринадцатого блока 33 умножения, выход тринадцатого блока 33 умножения соединен со входом делимого пятого пятого блока 41 деления, выход пятого блока 41 деления является пятым выходом системы.
Устройство работает следующим образом.
При перемещении, деформации и повороте контролируемого объекта в направлениях, показанных на чертеже стрелками, на выходах измерительных преобразователей 5-10 получают сигналы:
где k - чувствительность измерительных каналов, зависящая от внешних возмущений;
x0 - начальное расстояние от 1-го, 2-го, 3-го и 4-го датчиков до соответствующих поверхностей контролируемого объекта;
Δх1 - компонента, характеризующая линейное перемещение точки контролируемого объекта, принятой за полюс (в данном случае принят центр объекта) вдоль первой координатной оси;
Δх2 - компонента, характеризующая линейную деформацию контролируемого объекта между его крайними точками, вдоль первой координатной оси;
Δх3 - компонента, характеризующая поворот контролируемого объекта;
Δу1 - компонента, характеризующая линейное перемещение точки контролируемого объекта, принятой за полюс, вдоль второй координатной оси;
Δу2 - компонента, характеризующая линейную деформацию контролируемого объекта между его крайними точками вдоль второй координатной оси.
Сигналы (5) и (6) с выхода первого 5 и второго 6 измерительных преобразователей поступают на входы первого блока 17 вычитания, первого блока 21 умножения, на выходе которых получаем сигналы:


Сигналы (7) и (8) с выхода третьего 7 и четвертого 8 измерительных преобразователей поступают на входы первого блока 11 сложения, второго блока 18 вычитания и третьего блока 23 умножения, на выходе которых получаем сигналы:



Сигналы (9) и (10) с выхода пятого 9 и шестого 10 измерительных преобразователей поступают на входы второго блока 12 сложения, третьего блока 19 вычитания и четвертого блока 24 умножения, на выходе которых получаем сигналы:



Сигнал (11) с выхода первого блока 17 вычитания, сигнал (15) с выхода третьего блока 23 умножения поступают на входы восьмого блока 28 умножения, на выходе которого получаем сигнал:

Сигнал (12) с выхода первого блока 21 умножения, сигнал с выхода первого блока 11 сложения поступают на входы одиннадцатого блока 31 умножения, на выходе которого получаем сигнал:

Сигнал (20) с выхода одиннадцатого блока 31 умножения, сигнал (19) с выхода восьмого блока 28 умножения поступают на входы третьего блока 13 сложения, на выходе которого получаем сигнал:

Сигнал (19) с выхода восьмого блока 28 умножения, сигнал x0 с первого выхода блока 42 памяти поступают на входы четырнадцатого блока 34 умножения, на выходе которого получаем сигнал:

Сигнал (21) с выхода третьего блока 13 сложения, сигнал (22) с выхода четырнадцатого блока 34 умножения поступают на входы третьего блока 39 деления, на выходе которого получаем сигнал:

Этот сигнал характеризует линейное перемещение полюса (центра) "О" объекта вдоль направления, показанного на чертеже стрелкой.
Сигнал (6) с выхода второго 6 измерительного преобразователя, сигнал (15) с выхода третьего блока 23 умножения, сигнал (2) с третьего выхода блока 42 памяти поступают на входы второго блока 22 умножения, на выходе которого получаем сигнал:

Сигнал (12) с выхода первого блока 21 умножения, сигнал (13) с выхода первого блока 11 сложения поступают на входы двенадцатого блока 32 умножения, на выходе которого получаем сигнал:

Сигнал (24) с выхода второго блока 22 умножения, сигнал (25) с выхода двенадцатого блока 32 умножения поступают на входы шестого блока 16 сложения, на выходе которого получаем сигнал:

Сигнал (26) с выхода шестого блока 16 сложения, сигнал 2х0 с третьего выхода блока 42 памяти поступают на входы пятнадцатого блока 35 умножения, на выходе которого получаем сигнал:

Сигнал (27) с выхода пятнадцатого блока 35 умножения, сигнал (21) с выхода третьего блока 13 сложения поступают на входы четвертого блока 40 деления, на выходе которого получаем сигнал:

Этот сигнал характеризует линейное перемещение полюса (центра) "О" объекта вдоль направления, показанного на чертеже стрелкой.
Сигнал (14) с выхода второго блока 18 вычитания, сигнал (12) с выхода первого блока 21 умножения, сигнал х0 с первого выхода блока 42 памяти поступают на входы тринадцатого блока 33 умножения, на выходе которого получаем сигнал:

Сигнал (29) с выхода тринадцатого блока 33 умножения, сигнал (21) с выхода третьего блока 13 сложения поступают на входы пятого блока 41 деления, на выходе которого получаем сигнал:

Этот сигнал характеризует поворот контролируемого объекта вокруг полюса (центра) "О", угловое значение поворота может быть получено геометрическим пересчетом с использованием величины Δх3, и соответствующего радиуса.
Сигнал (12) с выхода первого блока 21 умножения, сигнал (15) с выхода третьего блока 23 умножения, сигнал 17 с выхода третьего блока 19 вычитания, сигнал x0 с первого выхода блока 42 памяти поступают на входы девятого блока 29 умножения, на выходе которого получаем сигнал:

Сигнал (19) с выхода восьмого блока 28 умножения, сигнал (25) с выхода двенадцатого блока 32 умножения поступают на входы четвертого блока 14 сложения, на выходе которого получаем сигнал:

Сигнал (32) с выхода четвертого блока 14 сложения, сигнал (18) с выхода четвертого блока 24 умножения поступают на входы седьмого блока 37 умножения, на выходе которого получаем сигнал:
Сигнал (31) с выхода девятого блока 29 умножения, сигнал (33) с выхода седьмого блока 37 умножения поступают на входы первого блока 37 деления, на выходе которого получаем сигнал:

Этот сигнал характеризует линейное перемещение полюса (центра) "О" объекта вдоль направления, показанного на чертеже стрелкой.
Сигнал (18) с выхода четвертого блока 24 умножения, сигнал (15) с выхода третьего блока 23 умножения, сигнал (11) с выхода первого блока 17 вычитания поступают на входы шестого блока 26 умножения, на выходе которого получаем сигнал:

Сигнал (18) с выхода четвертого блока 24 умножения, сигнал (12) с выхода первого блока 21 умножения, сигнал (13) с выхода первого блока 11 сложения поступают на входы пятого блока 25 умножения, на выходе которого получаем сигнал:

Сигнал (36) с выхода пятого блока 25 умножения, сигнал (35) с выхода шестого блока 26 умножения поступают на входы пятого блока 15 сложения, на выходе которого получаем сигнал:

Сигнал (16) с выхода второго блока 12 сложения, сигнал (12) с выхода первого блока 21 умножения, сигнал (15) с выхода третьего блока 23 умножения поступают на входы десятого блока 30 умножения, на выходе которого получаем сигнал:

Сигнал (38) с выхода десятого блока 30 умножения, сигнал (37) с выхода пятого блока 15 сложения поступают на входы четвертого блока 20 вычитания, на выходе которого получаем сигнал:
Сигнал (39) с выхода четвертого блока 20 вычитания, сигнал 2х0 с третьего выхода блока 42 памяти поступают на входы шестнадцатого блока 36 умножения, на выходе которого получаем сигнал:
Сигнал (40) с выхода шестнадцатого блока 36 умножения, сигнал (33) с выхода седьмого блока 37 умножения поступают на входы второго блока 38 деления, на выходе которого получаем сигнал:

Этот сигнал характеризует линейное перемещение полюса (центра) "О" объекта вдоль направления, показанного на чертеже стрелкой.
Источники информации
1. А.с. №1783283, кл. G 01 В 7/00, 1992 г., бюл. №47.
2. Пат. RU 2185596, кл. G 01 В 7/00. Информационно-измерительная система перемещений и деформаций объекта // В.Н.Нестеров, С.В.Рубцов. - №99122569/28 - Заявл. 27.10.99; Опубл. 20.07.02, бюл. №20.
Информационно-измерительная система перемещений и деформаций объекта относится к измерительной технике и может быть использована для измерения перемещений, деформаций и поворотов многомерных объектов в результате, например, тепловых и упругих возмущений. Система содержит четыре датчика линейных перемещений, подключенных к соответствующим измерительным преобразователям, и блок обработки информации, включающий в себя шесть блоков сложения, четыре блока вычитания, шестнадцать блоков умножения, пять блоков деления и блок памяти. Датчики расположены попарно диаметрально противоположно относительно контролируемого объекта. Чувствительные элементы одной из пар датчиков ориентированы относительно контролируемого объекта дифференциально, коллинеарно первой из выбранных координатных осей. Вторая пара датчиков содержит по паре взаимно ортогонально установленных чувствительных элемента. Два из них ориентированы дифференциально относительно контролируемого объекта и коллинеарно относительно второй координатной оси, и подключены к дополнительным измерительным преобразователям. А два других чувствительных элемента этой же пары датчиков ориентированы в одну сторону коллинеарно первой координатной оси. Технический результат - расширение функциональных возможностей и повышение точности измерения. 1 ил.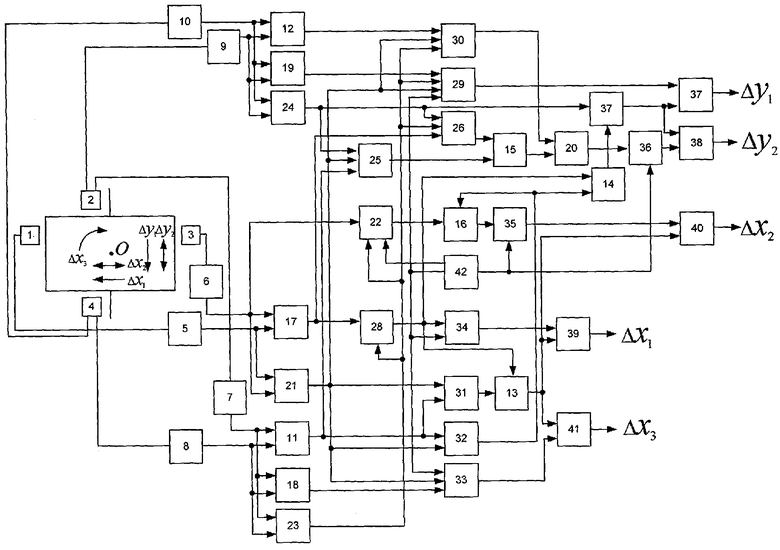
Информационно-измерительная система перемещений и деформаций объекта, содержащая четыре датчика линейных перемещений, подключенных к соответствующим измерительным преобразователям, чувствительные элементы двух из которых ориентированы относительно контролируемого объекта дифференциально, коллинеарно первой из выбранных координатных осей, и блок обработки информации, включающий в себя шесть блоков сложения, четыре блока вычитания, шестнадцать блоков умножения, пять блоков деления и блок памяти, отличающаяся тем, что датчики расположены попарно диаметрально противоположно относительно контролируемого объекта, причем вторая пара датчиков содержит по паре взаимно ортогонально установленных чувствительных элементов, два из которых, ориентированных дифференциально относительно контролируемого объекта и коллинеарно относительно второй координатной оси, подключены к дополнительным измерительным преобразователям, а два других чувствительных элемента этой же пары датчиков ориентированы в одну сторону коллинеарно первой координатной оси, причем выход первого измерительного преобразователя, соединенного с выходом первого датчика первой пары датчиков, подключен к прямому входу первого блока вычитания и первому входу первого блока умножения, выход второго измерительного преобразователя, соединенного с выходом второго датчика первой пары датчиков, подключен к инверсному входу первого блока вычитания, второму входу первого блока умножения и первому входу второго блока умножения, выход третьего измерительного преобразователя, соединенного с чувствительным элементом первого датчика второй пары, ориентированным коллинеарно первой координатной оси, подключен к первому входу первого блока сложения, инверсному входу второго блока вычитания и первому входу третьего блока умножения, выход четвертого измерительного преобразователя, соединенного с чувствительным элементом второго датчика второй пары, ориентированным коллинеарно первой координатной оси, подключен ко второму входу первого блока сложения, прямому входу второго блока вычитания и второму входу третьего блока умножения, выход пятого измерительного преобразователя, соединенного со вторым чувствительным элементом первого датчика второй пары, ориентированным коллинеарно второй координатной оси, подключен к первому входу второго блока сложения, к прямому входу третьего блока вычитания и первому входу четвертого блока умножения, выход шестого измерительного преобразователя, соединенного со вторым чувствительным элементом второго датчика второй пары, ориентированным коллинеарно второй координатной оси, подключен ко второму входу второго блока сложения, инверсному входу третьего блока вычитания и второму входу четвертого блока умножения, выход четвертого блока умножения соединен с первым входом пятого блока умножения, первым входом шестого блока умножения, первым входом седьмого блока умножения, выход третьего блока вычитания соединен с первым входом девятого блока умножения, выход третьего блока умножения соединен со вторым входом восьмого блока умножения, со вторым входом второго блока умножения, со вторым входом шестого блока умножения, вторым входом девятого блока умножения и третьим входом десятого блока умножения, выход первого блока умножения соединен с третьим входом девятого блока умножения, со вторым входом десятого блока умножения, со вторым входом пятого блока умножения, с первым входом одиннадцатого блока умножения, со вторым входом двенадцатого блока умножения, со вторым входом тринадцатого блока умножения, второй выход блока памяти соединен с четвертым входом девятого блока умножения, со вторым входом четырнадцатого блока умножения, с первым входом тринадцатого блока умножения, выход первого блока сложения соединен со вторым входом одиннадцатого блока умножения, с первым входом двенадцатого блока умножения, с третьим входом пятого блока умножения, выход пятого блока умножения соединен со вторым входом пятого блока сложения, выход первого блока вычитания соединен с первым входом восьмого блока умножения, с третьим входом шестого блока умножения, выход шестого блока умножения соединен с первым входом пятого блока сложения, выход второго блока сложения соединен с первым входом десятого блока умножения, выход десятого блока умножения соединен с инверсным входом четвертого блока вычитания, выход пятого блока сложения соединен со вторым входом четвертого блока вычитания, выход четвертого блока вычитания соединен с первым входом шестнадцатого блока умножения, третий выход блока памяти соединен со вторым входом пятнадцатого блока умножения, со вторым входом шестнадцатого блока умножения, выход шестнадцатого блока умножения соединен со входом делимого второго блока деления, выход восьмого блока умножения соединен с первым входом третьего блока сложения, первым входом четвертого блока сложения, с первым входом четырнадцатого блока умножения, выход которого соединен со входом делимого третьего блока деления, выход двенадцатого блока умножения соединен с первым входом шестого блока сложения, со вторым входом четвертого блока сложения, выход четвертого блока сложения соединен со вторым входом седьмого блока умножения, выход девятого блока умножения соединен со входом делимого первого блока деления, выход седьмого блока умножения соединен со входом делителя первого блока деления, со входом делителя второго блока деления, выход первого блока деления является первым выходом системы, выход второго блока деления является вторым выходом системы, выход одиннадцатого блока умножения соединен со вторым входом третьего блока сложения, выход третьего блока сложения соединен со входом делителя третьего блока деления, со входом делителя четвертого блока деления, со входом делителя пятого блока деления, выход третьего блока деления является третьим выходом системы, первый выход блока памяти соединен с третьим входом второго блока умножения, выход второго блока умножения соединен со вторым входом шестого блока сложения, выход шестого блока сложения соединен с первым входом пятнадцатого блока умножения, выход которого соединен со входом делимого четвертого блока деления, выход четвертого блока деления является четвертым выходом системы, выход второго блока вычитания соединен с третьим входом тринадцатого блока умножения, выход тринадцатого блока умножения соединен со входом делимого пятого блока деления, выход пятого блока деления является пятым выходом системы.
| ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ПЕРЕМЕЩЕНИЙ И ДЕФОРМАЦИЙ ОБЪЕКТА | 1999 |
|
RU2185596C2 |
| Информационно-измерительная система для определения компонент перемещений и деформаций объекта | 1990 |
|
SU1783283A1 |
| МАЛОАКТИВИРУЕМЫЙ КОРРОЗИОННО-СТОЙКИЙ СВАРОЧНЫЙ МАТЕРИАЛ | 2008 |
|
RU2383417C1 |
| JP 2003279333 А 02.10.2003. | |||

