Изобретение относится к измерительной технике и может быть использовано для измерения линейных перемещений, деформаций и поворотов объектов в результате, например, тепловых и упругих возмущений.
Известно множество измерительных устройств, реализующих алгоритмический метод измерения перемещений объектов, подверженных тепловым и упругим деформациям. Например, устройство [1], где в результате использования трех измерительных каналов получают величину радиального перемещения вала с одновременной компенсацией возмущающих воздействий со стороны контролируемого объекта. Их недостатком является недостаточная информативность из-за отсутствия контроля величины линейной деформации объекта в процессе измерения. Известно также устройство [2, 3], где использование тех же измерительных каналов, что и в устройстве [1] с некоторым усложнением блока обработки информации, позволяет дополнительно получить величину линейной деформации объекта.
Устройство [4] позволяет получить информацию о линейном перемещении, линейной деформации и повороте контролируемого объекта.
Действительно, если в соответствии с [4] выходные сигналы шести измерительных каналов аппроксимируются системой уравнений: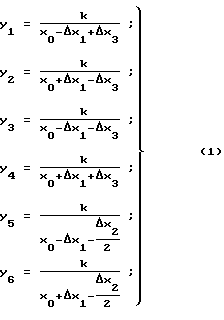
где k - чувствительность измерительных каналов;
х0 - начальное расстояние от 1-го и 2-го датчиков до контролируемого объекта, установленных дифференциально;
Δx1 - компонента, характеризующая линейное перемещение точки контролируемого объекта, принятой за полюс (в данном случае принят центр объекта);
Δx2 - компонента, характеризующая линейную деформацию объекта между его крайними точками;
Δx3 - компонента, характеризующая поворот вокруг центра контролируемого объекта,
то на выходе блока обработки получаем сигналы, характеризующие названные компоненты и инвариантные относительно возмущений со стороны контролируемого объекта:

К недостаткам известного устройства можно отнести сложность устройства из-за большого количества датчиков и элементов блока вычисления и погрешности измерения из-за большого количества измерительных каналов.
Сущность изобретения заключается в том, что в известном устройстве для измерения линейных перемещений и деформаций объекта, содержащем четыре датчика линейных перемещений, подключенных к соответствующим измерительным преобразователям и установленных попарно-дифференциально коллинеарно одной из выбранных координатных осей, и блок обработки информации, включающий в себя два блока сложения, четыре блока вычитания, три блока умножения, три блока деления и блок памяти, причем выход первого измерительного преобразователя, соединенного с выходом первого датчика, подключен к одному из входов первого блока сложения и прямому входу первого блока вычитания, выход второго измерительного преобразователя, соединенного с выходом второго датчика, подключен ко второму входу первого блока сложения и инверсному входу первого блока вычитания, выход третьего измерительного преобразователя, соединенного с выходом третьего датчика, подключен к одному из входов второго блока сложения и прямому входу второго блока вычитания, выход четвертого измерительного преобразователя, соединенного с выходом четвертого датчика, подключен ко второму входу второго блока сложения и инверсному входу второго блока вычитания, в блок обработки информации введены четвертый и пятый блоки умножения, причем выход первого измерительного преобразователя дополнительно подключен к одному из входов первого блока умножения и одному из входов второго блока умножения, выход второго измерительного преобразователя подключен ко второму входу первого блока умножения и второму входу второго блока умножения, выход третьего измерительного преобразователя подключен к одному из входов третьего блока умножения и одному из входов четвертого блока умножения, выход четвертого измерительного преобразователя подключен ко второму входу третьего блока умножения и второму входу четвертого блока умножения, выход первого блока сложения подключен к третьему входу третьего блока умножения, выход второго блока сложения подключен к третьему входу второго блока умножения, к четвертому входу которого подключен соответствующий выход блока памяти, выход первого блока вычитания подключен к третьему входу четвертого блока умножения, к четвертому входу которого подключен соответствующий выход блока памяти, выход второго блока вычитания подключен к третьему входу первого блока умножения, к четвертому входу которого подключен соответствующий выход блока памяти, выход первого блока умножения подключен к прямому входу четвертого блока вычитания и первому входу первого блока деления, выход второго блока умножения подключен к инверсному входу третьего блока вычитания, выход третьего блока умножения подключен ко второму входу первого блока деления, второму входу второго блока деления, второму входу третьего блока деления и одному из входов пятого блока умножения, ко второму входу которого подключен соответствующий выход блока памяти, выход четвертого блока умножения подключен к инверсному входу четвертого блока вычитания, выход которого является первым входом третьего блока деления, выход пятого блока умножения подключен к прямому входу третьего блока вычитания, выход которого подключен к первому входу второго блока деления, выход первого блока деления является первым выходом системы, выход второго блока деления является вторым выходом системы, а выход третьего блока деления является третьим выходом системы.
В результате расширяются функциональные возможности, повышается в определенном случае точность измерения и упрощается устройство.
На чертеже приведена блок-схема информационно-измерительной системы перемещений и деформаций объекта.
Информационно-измерительная система перемещений и деформаций объекта относится к измерительной технике и может быть использована для измерения перемещений, деформаций и поворотов объектов в результате, например, тепловых и упругих возмущений.
Информационно-измерительная система перемещений и деформаций объекта относится к измерительной технике и может быть использована для измерения перемещений, деформаций и поворотов многомерных объектов, подверженных сложным перемещениям и деформациям.
Устройство содержит четыре датчика 1-4 линейных перемещений, подключенных, соответственно, к измерительным преобразователям 5-8. Датчики линейных перемещений установлены попарно-дифференциально так, что их оси чувствительности параллельны координатным осям. Датчики 1 и 2 первой пары установлены дифференциально относительно плоского элемента, закрепленного на контролируемом объекте перпендикулярно осям чувствительности датчиков, датчики 3 и 4 установлены дифференциально относительно противоположных поверхностей контролируемого объекта и друг друга. Устройство имеет блок обработки информации, который содержит два блока 9 и 10 сложения, четыре блока 11-14 вычитания, пять блоков 15-19 умножения, три блока 20-22 деления и блок 23 памяти. Причем выход первого измерительного преобразователя 5, соединенного с выходом первого датчика 1, подключен к одному из входов первого блока 9 сложения, прямому входу первого блока 11 вычитания, одному из входов первого блока 15 умножения и одному из входов второго блока 16 умножения; выход второго измерительного преобразователя 6, соединенного с выходом второго датчика 2, подключен ко второму входу первого блока 9 сложения, инверсному входу первого блока 11 вычитания, второму входу первого блока 15 умножения и второму входу второго блока 16 умножения; выход третьего измерительного преобразователя 7, соединенного с выходом третьего датчика 3, подключен к одному из входов второго блока 10 сложения, прямому входу второго блока 12 вычитания, одному из входов третьего блока 17 умножения и одному из входов четвертого блока 18 умножения; выход четвертого измерительного преобразователя 8, соединенного с выходом четвертого датчика 4, подключен ко второму входу второго блока 10 сложения, инверсному входу второго блока 12 вычитания, второму входу третьего блока 17 умножения и второму входу четвертого блока 18 умножения; выход первого блока сложения 9 подключен к третьему входу третьего блока 17 умножения; выход второго блока 10 сложения подключен к третьему входу второго блока 16 умножения, к четвертому входу которого подключен соответствующий выход блока 23 памяти; выход первого блока 11 вычитания подключен к третьему входу четвертого блока 18 умножения, к четвертому входу которого подключен соответствующий выход блока 23 памяти; выход второго блока 12 вычитания подключен к третьему входу первого блока 15 умножения, к четвертому входу которого подключен соответствующий выход блока 23 памяти; выход первого блока 15 умножения подключен к прямому входу четвертого блока 14 вычитания и первому входу первого блока 20 деления; выход второго блока 16 умножения подключен к инверсному входу третьего блока 13 вычитания; выход третьего блока 17 умножения подключен ко второму входу первого блока 20 деления, второму входу второго блока 21 деления, второму входу третьего блока 22 деления и одному из входов пятого блока 19 умножения, ко второму входу которого подключен соответствующий выход блока 23 памяти; выход четвертого блока 18 умножения подключен к инверсному входу четвертого блока 14 вычитания, выход которого подключен к первому входу третьего блока 22 деления; выход пятого блока 19 умножения подключен к прямому входу третьего блока 13 вычитания, выход которого подключен к первому входу второго блока 21 деления; выход первого блока 20 деления является первым выходом системы; выход второго блока 21 деления является вторым выходом системы; выход третьего блока 22 деления является третьим выходом системы. Направления измеряемых компонентов Δx1, Δx2 и Δx3 перемещения, деформации и поворота, принятые за положительные, показаны на чертеже стрелками. Точкой "О" обозначен полюс объекта, совпадающий в данном случае с его геометрическим центром, поступательное перемещение которого идентифицируется компонентой Δx1.
Устройство работает следующим образом.
При перемещении, деформации и повороте контролируемого объекта в направлениях, показанных на чертеже стрелками, на выходах измерительных преобразователей 5-8 получают сигналы: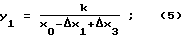
где k - чувствительность измерительных каналов, зависящая от внешних возмущений;
х0 - начальное расстояние от 1-го, 2-го, 3-го и 4-го датчиков до соответствующих поверхностей контролируемого объекта;
Δx1 - компонента, характеризующая линейное перемещение контролируемого объекта;
Δx2 - компонента, характеризующая линейную деформацию контролируемого объекта;
Δx3 - компонента, характеризующая поворот контролируемого объекта.
Сигналы (5) и (6) с выходов первого 5 и второго 6 измерительных преобразователей поступают на входы первого блока 9 сложения и на входы первого блока 11 вычитания, на выходе которых получают сигналы:
Сигналы (5) и (6) с выходов третьего 7 и четвертого 8 измерительных преобразователей поступают на входы второго блока 10 сложения и второго блока 12 вычитания, на выходе которых получают сигналы:
Сигнал (5) с выхода первого измерительного преобразователя 5, сигнал (6) с выхода второго измерительного преобразователя 6, сигнал (12) с выхода второго блока вычитания и сигнал х0 с первого выхода блока 23 памяти поступают на входы первого блока 13 умножения, на выходе которого получаем:
Сигнал (5) с выхода первого измерительного преобразователя 5, сигнал (6) с выхода второго измерительного преобразователя 6, сигнал (10) с выхода второго блока сложения и сигнал 2х0 со второго выхода блока 23 памяти поступают на входы второго блока 14 умножения, на выходе которого получаем:
Сигнал (7) с выхода третьего измерительного преобразователя 7, сигнал (8) с выхода четвертого измерительного преобразователя 8 и сигнал (9) с выхода первого блока 9 сложения поступают на входы третьего блока 15 умножения, на выходе которого получаем:
Сигнал (7) с выхода третьего измерительного преобразователя 7, сигнал (8) с выхода четвертого измерительного преобразователя 8, сигнал (11) с выхода первого блока 11 вычитания и сигнал х0 с первого выхода блока 23 памяти поступают на входы четвертого блока 16 умножения, на выходе которого получаем:
Сигнал (15) с выхода третьего блока 15 умножения и сигнал 2х0 со второго выхода блока 23 памяти поступают на входы пятого блока 17 умножения, на выходе которого получаем:
Сигналы (13) и (15) с выходов первого и третьего блоков 13 и 15 умножения поступают на входы первого блока 20 деления, на выходе которого получаем:
Этот сигнал характеризует линейное перемещение полюса (центра) "О" объекта вдоль направления, показанного на чертеже стрелкой.
Сигналы (17) и (14) с выходов пятого и второго блоков 17 и 14 умножения поступают на соответствующие входы третьего блока 18 вычитания, на выходе которого получаем:
Сигнал (19) с выхода третьего блока 18 вычитания и (15) с выхода третьего блока 15 умножения поступают на входы второго блока 21 деления, на выходе которого получаем:
Сигналы (13) и (16) с выходов первого и четвертого блоков 13 и 16 умножения поступают на соответствующие входы четвертого блока 19 вычитания, на выходе которого получаем:
Сигнал (21) с выхода третьего блока 19 вычитания и (15) с выхода третьего блока 15 умножения поступают на входы третьего блока 22 деления, на выходе которого получаем:
Этот сигнал характеризует поворот контролируемого объекта вокруг полюса (центра) "О", угловое значение поворота может быть получено геометрическим пересчетом с использованием величины Δx3 и соответствующего радиуса.
Величина х0 начального расстояния от датчиков до контролируемых поверхностей считается известной. Величины Δx1, Δx2 и Δx3 в соответствии с выражениями (18), (20) и (22) характеризуют линейное перемещение, линейную деформацию, поворот контролируемого объекта и не зависят от изменений под действием внешних возмущений параметра k.
Применение данного изобретения упрощает устройство за счет уменьшения количества необходимых датчиков.
Источники информации
1. Авторское свидетельство СССР 1562674, кл. G 01 В 7/00, 1990 г., бюл. 17.
2. Авторское свидетельство СССР 1663396, кл. G 01 В 7/00, 1991 г., бюл. 26.
3. Измерительная техника, 1992, 5, с. 17-18.
4. Авторское свидетельство 1783283, кл. G 01 В 7/00, 1992 г., бюл. 47.
Изобретение относится к измерительной технике и может быть использовано для измерения перемещений, деформаций и поворотов многомерных объектов, подверженных сложным перемещениям и деформациям. Устройство содержит четыре датчика линейных перемещений, подключенных соответственно к измерительным преобразователям. Датчики линейных перемещений установлены попарно-дифференциально так, что их оси чувствительности параллельны координатным осям. Датчики первой пары установлены дифференциально относительно плоского элемента, закрепленного на контролируемом объекте перпендикулярно осям чувствительности датчиков, датчики другой пары установлены дифференциально относительно противоположных поверхностей контролируемого объекта и друг друга. Устройство имеет блок обработки информации, который содержит два блока сложения, четыре блока вычитания, пять блоков умножения, три блока деления и блок памяти. Техническим результатом изобретения является упрощение устройства за счет уменьшения количества необходимых датчиков. 1 ил.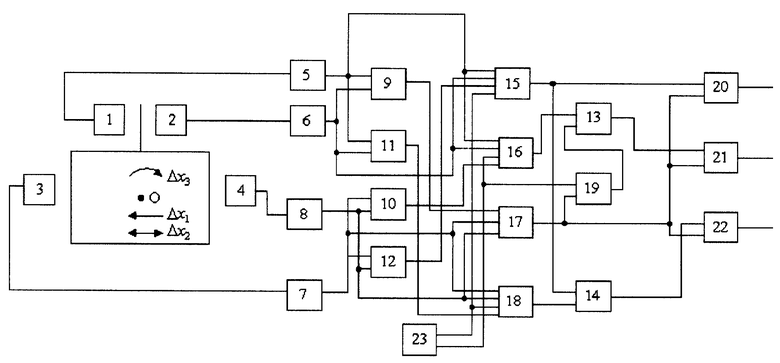
Информационно-измерительная система перемещений и деформаций объекта, содержащая четыре датчика линейных перемещений, подключенных к соответствующим измерительным преобразователям и установленных попарно-дифференциально коллинеарно одной из выбранных координатных осей, и блок обработки информации, включающий в себя два блока сложения, четыре блока вычитания, три блока умножения, три блока деления и блок памяти, причем выход первого измерительного преобразователя, соединенного с выходом первого датчика, подключен к одному из входов первого блока сложения и прямому входу первого блока вычитания, выход второго измерительного преобразователя, соединенного с выходом второго датчика, подключен ко второму входу первого блока сложения и инверсному входу первого блока вычитания, выход третьего измерительного преобразователя, соединенного с выходом третьего датчика, подключен к одному из входов второго блока сложения и прямому входу второго блока вычитания, выход четвертого измерительного преобразователя, соединенного с выходом четвертого датчика, подключен ко второму входу второго блока сложения и инверсному входу второго блока вычитания, отличающееся тем, что в блок обработки информации введены четвертый и пятый блоки умножения, а выход первого измерительного преобразователя дополнительно подключен к одному из входов первого блока умножения и одному из входов второго блока умножения, выход второго измерительного преобразователя подключен ко второму входу первого блока умножения и второму входу второго блока умножения, выход третьего измерительного преобразователя подключен к одному из входов третьего блока умножения и одному из входов четвертого блока умножения, выход четвертого измерительного преобразователя подключен ко второму входу третьего блока умножения и второму входу четвертого блока умножения, выход первого блока сложения подключен к третьему входу третьего блока умножения, выход второго блока сложения подключен к третьему входу второго блока умножения, к четвертому входу которого подключен соответствующий выход блока памяти, выход первого блока вычитания подключен к третьему входу четвертого блока умножения, к четвертому входу которого подключен соответствующий выход блока памяти, выход второго блока вычитания подключен к третьему входу первого блока умножения, к четвертому входу которого подключен соответствующий выход блока памяти, выход первого блока умножения подключен к прямому входу четвертого блока вычитания и первому входу первого блока деления, выход второго блока умножения подключен к инверсному входу третьего блока вычитания, выход третьего блока умножения подключен ко второму входу первого блока деления, второму входу второго блока деления, второму входу третьего блока деления и одному из входов пятого блока умножения, ко второму входу которого подключен соответствующий выход блока памяти, выход четвертого блока умножения подключен к инверсному входу четвертого блока вычитания, выход которого является первым входом третьего блока деления, выход пятого блока умножения подключен к прямому входу третьего блока вычитания, выход которого подключен к первому входу второго блока деления, выход первого блока деления является первым выходом системы, выход второго блока деления является вторым выходом системы, а выход третьего блока деления является третьим выходом системы.
| Устройство для измерения радиального отклонения прецессирующего вала | 1989 |
|
SU1663396A1 |
| Устройство для определения глубин промерзания и оттаивания почвы | 1972 |
|
SU482672A1 |
| US 5896032 А, 20.04.1999, FR 2585123 A, 23.01.1987. | |||
