Изобретение относится к измерительной технике и может быть использовано для измерения компонент различных перемещений и деформаций изделий в направлениях трех ортогональных осей координат, например, при испытаниях теплонапряжен- ных объектов цилиндрической формы, в частности, корпусов газотурбинных двигателей.
Целью изобретения является повышение точности измерений за счет исключения погрешностей от влияния дестабилизирующих факторов, в частности, чувствительности преобразователей, а также повышение информативности измерений за счет возможности независимого определения деформаций и перемещений контролируемого объекта по различным его сечениям и координатам.
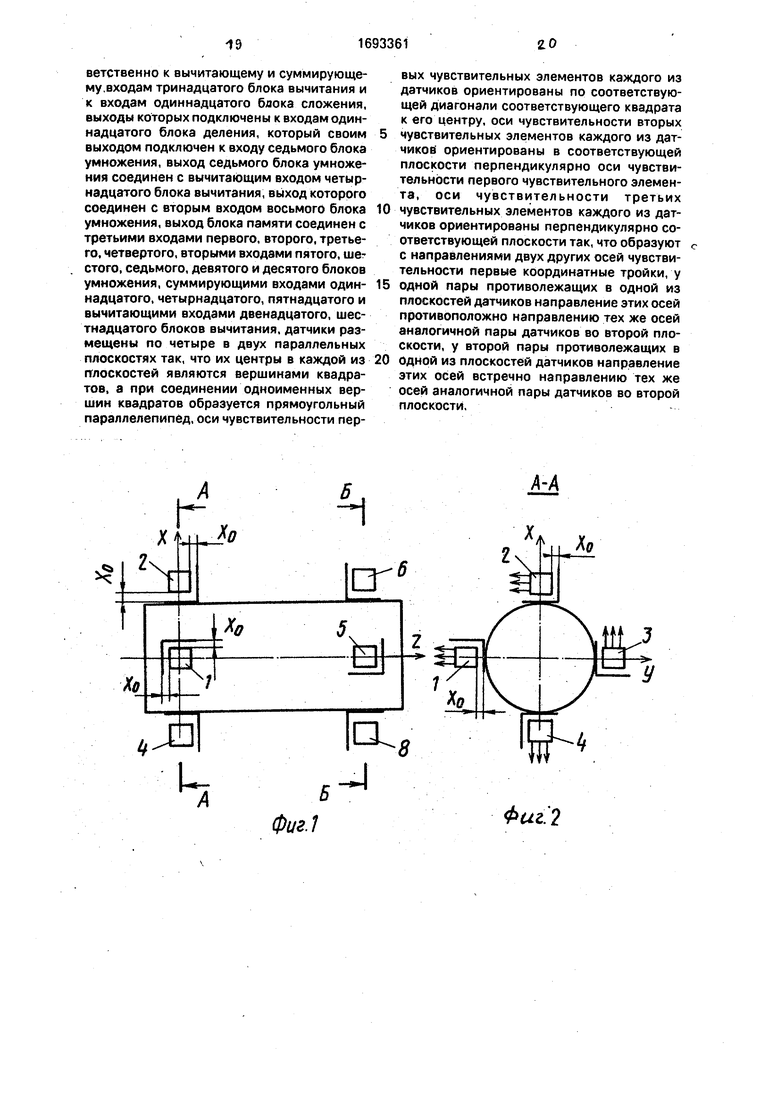
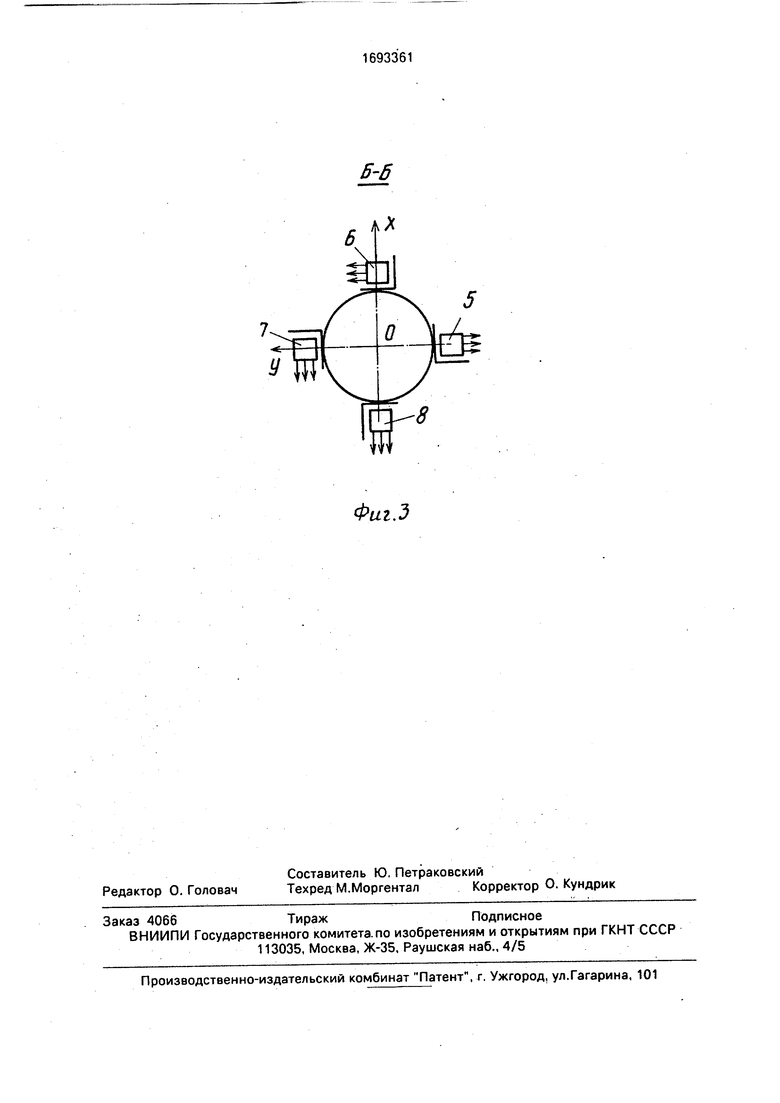
На фиг.1 показана схема расположения датчиков относительно объекта контроля; на фиг.2 - разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - блок-схема информационно-измерительной системы (в качестве объекта контроля для примера выбрано цилиндрическое тело).
Информационно-измерительная система для определения компонент перемещений и деформаций теплонапряженного объекта цилиндрической формы (фиг.1) содержит восемь трехкомпонентных датчиков 1-8 перемещений с тремя ортогонально установленными чувствительными элементами в каждом (не показаны), четыре из которых 1-4 установлены в сечении А-А, а четыре других 5-8 установлены аналогично в сечении Б-Б. Причем первые чувствительные элементы датчиков ориентированы ра- диально поверхности объекта контроля, вторые чувствительные элементы датчиков ориентированы тангенциально поверхности объекта контроля, третьи чувствительные элементы датчиков ориентированы в осевом направлении. Информационно-измерительная система содержит также (фиг.2) восемь трехканальных измерительных преобразователей 9-16, подключенных своими каналами соответственно к выходам чувствительных элементов датчиков 1-8, шестнадцать блоков 17-32 вычитания, одиннадцать блоков 33-43 сложения, одиннадцать блоков 44-54 деления, десять блоков 55-64 умножения и один блок 65 памяти. Выход первого канала первого измерительного преобразователя 9 подключен к вычитающему входу второго блока 18 вычитания и к входу второго блока 34 сложения, выход второго канала первого измерительного преобразователя 9 подключен к суммирующему входу третьего блока 19 вычитания и к входу третьего блока 35 сложения, выход третьего канала первого измерительного преобразователя 9 подключен к суммирующему входу пятого блока 21 вычитания и к входу пятого блока 37 сложения, выход первого канала второго измерительного преобразователя 10 подключен к вычи- тающему входу четвертого блока 20 вычитания и к входу четвертого блока 36
0 сложения, выход второго канала второго измерительного преобразователя 10 подключен к вычитающему входу первого блока 17 вычитания и к входу первого блока 33 сложения, выход третьего канала второго изме5 рительного преобразователя 10 подключен к вычитающему входу шестого блока 22 вычитания и к входу шестого блока 38 сложения, выход первого канала третьего измерительного преобразователя 11 под0 ключей к суммирующему входу второго блока 18 вычитания и к второму входу второго блока 34 сложения, выход второго канала третьего измерительного преобразователя 11 подключен к вычитающему входу третье5 го блока 19 вычитания и к второму входу третьего блока 35 сложения, выход первого канала четвертого измерительного преобразователя 12 подключен к суммирующему входу четвертого блока 20 вычитания и к
0 второму входу четвертого блока 36 сложения, выход второго канала четвертого измерительного преобразователя 12 подключен к суммирующему входу первого блока 17 вычитания и к второму входу первого блока
5 33 сложения, выход первого канала пятого измерительного преобразователя 13 подключен к вычитающему входу восьмого блока 24 вычитания и к входу восьмого блока 40 сложения, выход второго канала пятого из0 мерительного преобразователя 13 подключен к вычитающему входу девятого блока 25 вычитания и к входу девятого блока 41 сложения, выход третьего канала пятого измерительного преобразователя 13 подключен
5 к вычитающему входу пятого блока 21 вычитания и к второму входу пятого блока 37 сложения, выход первого канала шестого измерительного преобразователя 14 подключен к вычитающему входу десятого бло0 ка 26 вычитания и к входу десятого блока 42 сложения, выход второго канала шестого измерительного преобразователя 14 подключен к суммирующему входу седьмого блока 23 вычитания и к входу седьмого блока 39
5 сложения, выход третьего канала шестого измерительного преобразователя 14 подключен к суммирующему входу шестого блока 22 вычитания и к второму входу шестого блока 38 сложения, выход первого канала седьмого измерительного преобразователя
15 подключен к суммирующему входу восьмого блока 24 вычитания и к второму входу восьмого блока 40 сложения, выход второго канала седьмого измерительного преобразователя 15 подключен к суммирующему входу девятого блока 25 вычитания и к второму входу девятого блока 41 сложения, выход первого канала восьмого измерительного преобразователя 16 подключен к суммирующему входу десятого блока 26 вычитания и к второму входу десятого блока 42 сложения, выход второго канала восьмого измерительного преобразователя 16 подключен к вычитающему входу седьмого блока 23 вычитания и к второму входу седьмого блока 39 сложения, выходы первого блока 17 вычитания и первого блока 33 сложения подключены к входам первого блока 44 деления, выходы второго блока 34 сложения и второго блока 18 вычитания подключены к входам второго блока 45 деления, выходы третьего блока 19 вычитания и третьего блока 35 сложения подключены к входам третьего блока 46 деления, выходы четвертого блока 36 сложе- ния и четвертого блока 20 вычитания подключены к входам четвертого блока 47 деления, выходы пятого блока 21 вычитания и пятого блока 37 сложения подключены к входам пятого блока 48 деления, выходы шестого блока 22 вычитания и шестого блока 38 сложения подключены к входам шестого блока 49 деления, выходы седьмого блока 23 вычитания и седьмого блока 39 сложения подключены к входам седьмого блока 50 деления, выходы восьмого блока 40 сложения и восьмого блока 24 вычитания подключены к аходам восьмого блока 51 деления, выходы девятого блока 25 вычитания и девятого блока 41 сложения подклю- чены к входам девятого блока 52 деления, выходы десятого блока 42 сложения и десятого блока 26 вычитания подключены к входам десятого блока 53 деления, выходы первого 44 и второго 45 блоков деления подключены к входам первого блока 55 умножения, выходы третьего 46 и четвертого 47 блоков деления подключены к входам второго блока 56 умножения, выходы седьмого 50 и восьмого 51 блоков деления под- ключены к входам третьего блока 57 умножения, выходы девятого 52 и десятого 53 блоков деления подключены к входам четвертого блока 58 умножения, выходы первого 55, второго 56, третьего57 ичетвер- того 58 блоков умножения подключены соответственно к входам одиннадцатого 27, двенадцатого 28, пятнадцатого 31 и шестнадцатого 32 блоков вычитания, Кроме того, выходы первого 44, третьего 46, шестого 49,
седьмого 50 и девятого 52 блоков деления подключены соответственно к входам пятого 59, шестого 60, восьмого 62, девятого 63 и десятого 64 блоков умножения, выход пятого блока 48 деления подключен к вычитающему входу тринадцатого блока 29 вычитания и к входу одиннадцатого блока 43 сложения, выход шестого блока 49 деления подключен к суммирующему входу тринадцатого блока 29 вычитания и к второму входу одиннадцатого блока 43 сложения, выходы тринадцатого блока 29 вычитания и одиннадцатого блока 43 сложения подключены к входам одиннадцатого блока 54 деления, который своим выходом подключен к входу седьмого блока 61 умножения, выход седьмого блока 61 умножения подключен к вычитающему входу четырнадцатого блока 30 вычитания, выход которого подключен к второму входу восьмого блока 62 умножения. Кроме того, с входами первого 55, второго 56, третьего 57, четвертого 58, пятого 59, шестого 60, седьмого 61, девятого 63 и десятого 64 блоков умножения, суммирующими входами одиннадцатого 27, четырнадцатого 30, пятнадцатого 31 и вычитающими входами двенадцатого 28, шестнадцатого 32 блоков вычитания соединен выход блока 65 памяти. Третьи чувствительные элементы датчиков 3, 4, 7 и 8 и третьи каналы измерительных преобразователей 11, 12, 15 и 16 являются резервными и могут быть использованы для расширения функциональных возможностей системы.
Информационно-измерительная система работает следующим образом. .
При работе системы сигналы на выходах измерительных преобразователей 9-16 определяются выражениями соответственно:
+Zi
(1)
(2)
(3)
(4)
(5)
(6)
К
XO-NI-YI
К
Xo+X
к
-v
X0 + Li - Xi К
Xo - Yi
X0 - N2 + Y2 К
Xo + X2
к
X0+Mi+Zi
к
-yre
X0 + L2 + Хг
К
X0-Y2 К
X0-Mi -Zi
К
X0 - N2 - Y2 1
X0-X2
К Xo + L2 - X2
К
X0+Y2
.(7) (8)
(9) (10)
; (11) (12) (13) (14) (15)
: (16)
; (17)
(18) ; (19) (20)
где первый индекс при U определяет номер датчика;
второй - номер чувствительного элемента датчика;
К - чувствительность цепи датчик - измерительный преобразователь, которая вследствие идентичности датчиков и измерительных преобразователей для всех каналов подвержена одинаковому воздействию влияющих факторов;
Хо - начальное расстояние между чувст- вительными элементами датчиков и гранями трехгранных опорных уголков, закрепленных на объекте контроля (фиг.1);
NI -деформация диаметра объекта контроля по оси OY в сечении А-А;
N2 - деформация диаметра объекта контроля по оси OY в сечении Б-Б;
Li - деформация диаметра объекта контроля по оси ОХ в сечении А-А; - деформация диаметра объекта контролй по оси ОХ в сечении Б-Б;
Yi - перемещение объекта контроля относительно начального положения по оси OY в сечении А-А;
Xi - перемещение объекта контроля относительно начального положения по оси ОХ в сечении А-А;
Y2 - перемещение объекта контроля относительно начального положения по оси OY в сечении Б-Б;
Х2 - перемещение объекта контроля относительно начального положения по оси ОХ в сечении Б-Б;
Mi - осевая деформация объекта конт- роля на длине между сечениями А-А и Б-Б;
Zi - перемещение объекта контроля относительно начального положения по оси OZ/
Сигнал с выхода второго канала второго измерительного преобразователя 10
U22
XO+YI
поступает на вычитающий вход первого блока 17 вычитания и на вход первого блока 33 сложения, а сигнал с выхода второго канала четвертого измерительного преобразователя 12
U42
К
Xo-Yi
поступает на суммирующий вход первого блока 17 вычитания и на второй вход первого блока 33 сложения. Сигналы с их выходов
U42 - 1)22
2 KYy Х2о - Y
(21)
U42+U22
2 КХо XS-Y
(22)
поступают на входы первого блока 44 деления, на выходе которого получают
U42-U22 У1 U42 + U22 Xo
(23)
Этот сигнал поступает на вход пятого блока 59 умножения, на выходе которого после умножения на Х0 получают сигнал, характеризующий перемещение объекта контроля
относительно начального по оси OY в сечении А-А
v (U42-U22) (U42+U22)
(24)
Сигнал с выхода первого канала первого измерительного преобразователя 9
Un
Х0 - Ni + Yi
поступает на вычитающий вход второго блока 18 вычитания и на вход второго блока 34 сложения, а сигнал с выхода первого канала третьего измерительного преобразователя 11
U3i
XO-NI-YI
поступает на суммирующий вход второго блока 18 вычитания и на другой вход второго блока 34 сложения. Сигналы с их выходов
U31-U11
2 KYi
(X0-Ni)2-Y
(25)
)
поступают на входы второго блока 45 деления, на выходе которого получают
U31+U11 (Xo-Ni) U31-U11Yi
(27)
Этот сигнал, а также сигналы с первого блока 44 деления и блока 65 памяти соответственно
U42-U22 Yi U42 + U22 Хо
(23)
и Х0 поступают на входы первого блока 55 умножения, на выходе которого получают
(Ug -UaKUa +Un) х . ш Хо (U4z+Ua)(U3i-Uri) Хо Nb
Сигнал (28) поступает на вычитающий вход одиннадцатого блока 27 вычитания, а на его суммирующий вход поступает сигнал Х0 с блока 65 памяти. В результате на выходе одиннадцатого блока 27 вычитания получают сигнал, характеризующий деформацию диаметра объекта контроля по оси OY в сечении А-А:
N, -х -х (Ug-Ua)(U3i +Uii)
X° (U42+U22HU31 U11) P9)
5 Сигнал с выхода второго канала первого измерительного преобразователя 9
Ul2
X0-Xi
поступает на суммирующий вход третьего блока 19 вычитания и на вход третьего блока 35 сложения, а сигнал с выхода второго канала третьего измерительного преобразователя 11
U32
К
X0+Xi
поступает на вычитающий вход третьего блока 19 вычитания и на другой вход третьего блока 35 сложения. Сигнал с их выходов
и и 2KXi Ui2-U32 -
U12+U32
Хо-Х
2КХ0 Х0-Х3
(30)
(3D
поступают на входы третьего блока 46 деления, на выходе которого получают
U12 - Уза ,ы
U12 +1)32 Хо ( }
Этот сигнал поступает на вход шестого блока 60 умножения, на второй вход которого поступает с блока 65 памяти сигнал Хо, а 40 сигналы на его выходе
х х (U12-U32) «« 1 ° (U12+U32) IJJJ
характеризует перемещение объекта контроля относительно начального положения по оси ОХ в сечении А-А.
Сигнал с выхода первого канала четвертого измерительного преобразователя, 12
U41
К
Х0 + Ц - Xi
поступает на суммирующий вход четвертого блока 20 вычитания и на вход четвертого блока 36 сложения, а сигнал с выхода первого канала второго измерительного преобразователя 10
11169336112
I u,К .мого блока 39 сложения. Сигналы с их выхоU21 Xo+Li-Xi дов
| название | год | авторы | номер документа |
|---|---|---|---|
| Информационно-измерительная система для определения компонент перемещений и деформаций объекта | 1990 |
|
SU1783283A1 |
| АДАПТИВНЫЙ ВРЕМЕННОЙ ДИСКРЕТИЗАТОР | 2015 |
|
RU2583707C1 |
| ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ПЕРЕМЕЩЕНИЙ И ДЕФОРМАЦИЙ ОБЪЕКТА | 2005 |
|
RU2292012C1 |
| ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНАЯ СИСТЕМА ПЕРЕМЕЩЕНИЙ И ДЕФОРМАЦИЙ ОБЪЕКТА | 2005 |
|
RU2307315C1 |
| Устройство для определения пространственно-энергетических характеристик лазерного излучения | 1988 |
|
SU1539541A1 |
| Плужковый сбрасыватель ленточного конвейера | 1986 |
|
SU1419969A1 |
| Устройство для измерения физической величины | 1989 |
|
SU1691685A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ГЛУБИНЫ РАСПОЛОЖЕНИЯ ОБЪЕКТОВ С ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2349937C1 |
| Устройство для измерения перемещений | 1991 |
|
SU1798616A1 |
| Генератор случайных чисел | 1990 |
|
SU1817093A1 |
Изобретение относится к измерительной технике и может быть использовано для измерения компонент различных перемещений и деформаций изделий в направлениях трех ортогональных осей координат, например, при испытаниях теплонапряжен- ных объектов цилиндрической формы, в частности корпусов газотурбинных двигателей. Целью изобретения является повышение точности и информативности измерений. Устройство содержит трехком- понентные датчики 1-8 перемещений, определенным образом ориентированные относительно контролируемого изделия. Каждый из датчиков содержит три ортогонально установленных чувствительных элемента. К каждому из датчиков подключен соответствующий трехканальный измерительный преобразователь 9-16, При перемещении участков контролируемого изделия относительно датчиков на выходах преобразователей 9-16 формируются сигналы, поступающие на соответствующие входы блоков 17-26 вычитания и блоков 33- 42 сложения, с выходов блоков вычитания и сложения сигналы поступают на входы блоков 44-53 деления, с выходов которых сигналы поступают на соответствующие входы блоков 55-58 умножения. Одновременно на входы указанных блоков умножения поступают сигналы с блока 65 памяти, в котором хранится информация о начальном расстоянии между чувствительными элементами и поверхностями контролируемого объекта. В результате вычислений на выходах блоков 59-64 умножения и блоков 27-28, 31-32 вычитания образуются сигналы, пропорциональные перемещениям и деформациям соответствующих точек контролируемой поверхности. 4 ил. Ch чэ GJ 00 Ov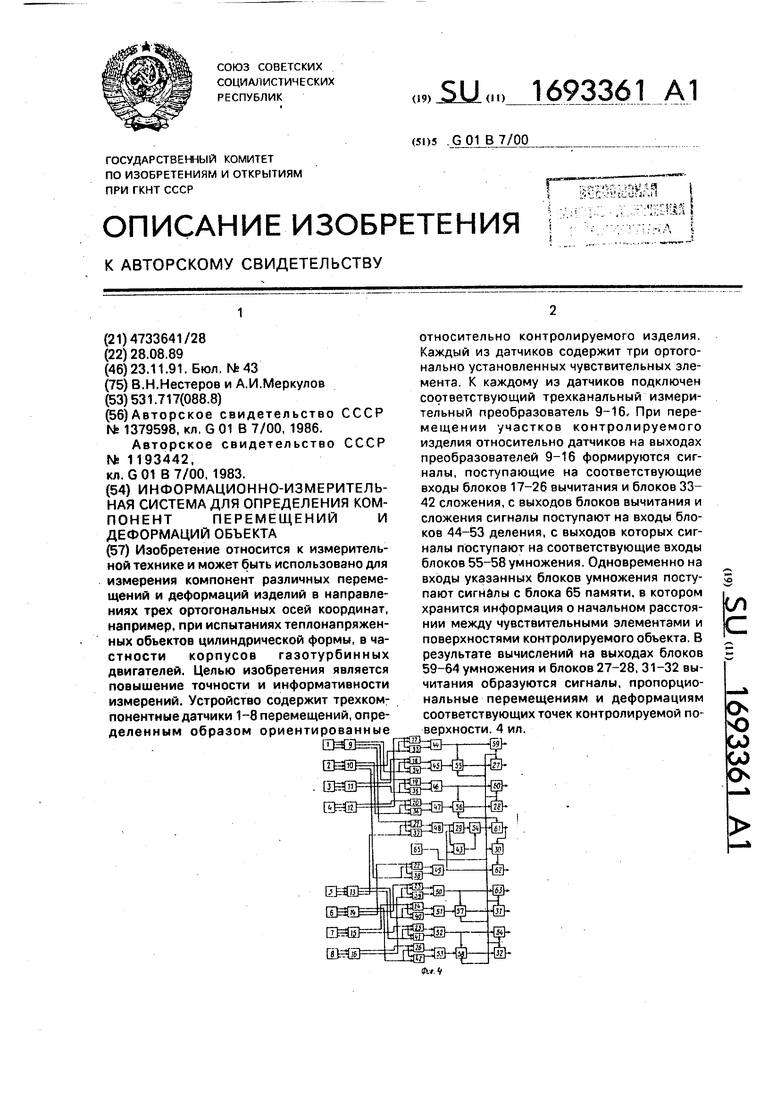
поступает на вычитающий вход четвертого.. 2KY2
блока 20 вычитания и на другой вход четвер- 52
того блока 36 сложения. Сигналы с их выходовоку
и62+и82 - 4- ДО)
(x+uy-rt (И)
v поступают на входы седьмого блока 50 деnv v .LI чления. на выходе которого получают
U41+U21 , K( °t 2 (35)
(Хо+М)2-Х U62-U82 Y2....
15U62+U82 Хо (
поступают на выходы четвертого блока 47Этот сигнал поступает на вход девятого блоделения, на выходе которого получают«а 63 умножения, на второй вход которого
поступает с блока 65 памяти сигнал Хо, а
U41 + ( Х0 + Li )П(Л20сигнал на его выходе
U41 - U21X1W
Vo X ( U62 - U82 ) ,л„ч
Этот сигнал, а также сигналы с третьего(Ue2 + Ua2) блока 46 деления и с блока 65 памяти поступают на входы второго блока 56 умножения, 25характеризует перемещение объекта конт- на выходе которого получаютроля относительно начального положения
по оси OY в сечении Б-Б.
X (Uгг - Цзе ) ( + Ц21 ) х + Li (37)Сигнал с выхода первого канала седьмо0 ( Utz + Uaz ) (U41 - U2i ) ° }го измерительного преобразователя 15
30
Сигнал (37) поступает на суммирующий..К
вход двенадцатого блока 28 вычитания, а на71 Х0 - N2 - Y2
его вычитающий вход поступает сигнал с
блока 65 памяти. В результате на выходепоступает на суммирующий вход восьмого
двенадцатого блока 28 вычитания получают 35блока 24 вычитания и на вход восьмого блосигнал, характеризующий деформцию диа-ка 40 сложения, а сигнал с выхода первого
метра объекта контроля по оси ОХ в сеченииканала пятого измерительного преобразоА-А:вателя 13
LI Хо г..1л.п± м::1Ги: - Хо. о 40 u5i к
-X (U12-U32UU41+U21) х «т Х° (U12+U32)(U41-U21) )
Сигнал с выхода второго канала шесто-поступает на вычитающий вход восьмого
го измерительного преобразователя 14блока 24 вычитания и на другой вход вось45мого блока 40 сложения. Сигнал с их выхоцсч К .дов U62 X0-Y2
2KY2
поступает на суммирующий вход седьмого tt U5is «ГТТг
блока 23 вычитания и на вход седьмого бло- 50(0 - N 2) - Уй
ка 39 сложения, а сигнал с выхода второго
канала восьмого измерительного преобра-. .. 2К(Ха- N2
зователя „ Na г
(X.
U82
55
X0+Y2
поступают на входы восьмого блока 51 депоступает на вычитающий вход седьмого ления, на выходе которого получают блока 23 вычитания и на другой вход седь к
„ Na г
(X.
55
U71 +U51 ( Хо - N2 )
-U51
Y2
(45)
Этот сигнал, а также сигналы с седьмого блока 50 деления и блока 65 памяти поступают на входы третьего блока 57 умножения, на выходе которого получают
(Ua-UffiKUTi +Usi) x N, Хо (Us + Us)(U7, -Usi ) ° 2
(46)
Сигнал (46) поступает на вычитающий вход пятнадцатого блока 31 вычитания, а на его суммирующий вход поступает сигнал Х0 с блока 65 памяти. В результате на выходе пятнадцатого блока 31 вычитания получают сигнал, характеризующий деформацию диаметра обьекта контроля по оси OY в сечении Б-Б
N,XO х„ fug-uaH 71 +u5Q т
N2 Хо Хо (U® +Uffi)(U7i -U5i )
Сигнал с выхода второго канала седьмого измерительного преобразователя 15
1)
К
х2
поступает на суммирующий вход девятого блока 25 вычитания и на вход девятого блока 41 сложения, а сигнал с выхода второго канала пятого измерительного преобразо- вателя 13
U52К
Х0 + Х2
поступает на вычитающий вход девятого блока 25 вычитания и на другой вход девятого блока 41 сложения. Сигналы с их выходов
(«
- X.
2КХ,
X2- X2 ло А2
(49)
поступают на входы девятого блока 52 деления, на выходе которого получают
Хо1
(50)
Этот сигнал поступает на вход десятого блока 64 умножения, на второй вход которого с
блока 65 памяти поступает сигнал Х0, а сигнал на его выходе
Х2 Х0
( U52 )
( U72 + U52 )
(51)
характеризует перемещение объекта контроля относительно начального положения по оси ОХ в сечении Б-Б.
Сигнал с выхода первого канала восьмого измерительного преобразователя 16
U8i
Х0 + L2 - Х2 поступает на суммирующий вход десятого блока 26 вычитания и на вход десятого блока 42 сложения, а сигнал с выхода первого канала шестого измерительного преобразователя 14
Uei
К
Х0 + L2 + Хо
поступает на вычитающий вход десятого блока 26 вычитания и на другой вход десятого блока 42 сложения. Сигналы с их выходов
2КХ,
VUH ,., 4, ,2 xi ; () - лг
2К(К0 + Ц)
(
(5«
(53)
поступают на входы десятого блока 53 деления, на выходе которого получают
Usi +Ц61 (Хо + L2 )
U81 - Uei
Х2
(54)
Этот сигнал, а также сигналы с девятого блока 52 деления и блока 65 памяти поступают на входы четвертого блока 58 умножения, на выходе которого получают
у fU72-U53)(U81+U6l),. ,.
Хо (U72+U53)(Uei-U6i)Xo+L2 W
Сигнал (55) поступает на суммирующий вход шестнадцатого блока 32 вычитания, а на его вычитающий вход поступает сигнал Хо с блока 65 памяти. В результате на выходе шестнадцатого блока 32 вычитания получают сигнал, характеризующий деформацию диаметра объекта контроля по оси ОХ в сечении Б-Б
L2 XC
( U72 - 1)52 И Uei + Uei ) v ( U72 + U52 ) ( Uei Uei ) c
(56)
15169336116
Сигнал с выхода третьего канала перво- поступаают на входы шестого блока 49 де- го. измерительного преобразователя 9ления, на выходе которого получают
Uv, Л .U63 - U23 Zif
U13 X0+Mi-Zi 5 U63-fU23 (X0-Mi) (62)
поступает на суммирующий вход пятогоСигнал (59) с выхода пятого блока 48 делеблока 21 вычитания и вход пятого блока 37ния поступает на вычитающий вход тринадсложения, а сигнал с выхода третьего кана-цатого блока 29 вычитания и на вход
ла пятого измерительного преобразователя 10одиннадцатого блока 43 сложения, а сигнал
13(62) с выхода шестого блока 49 деления поступает на суммирующий вход тринадцато- с
уК .го блока 29 вычитания и на другой вход
Х0 + Mi +Zi одиннадцатого блока 43 сложения. Сигналы
15с их выходов
поступает на вычитающий вход пятого бло-..
ка 21 вычитания и на другой вход пятого ьг гг
блока 37 сложения. Сигналы с их выходовг,, .. м /7J v 2- м2
1 63 23 l (J v
2KZ
,- ) ..
№TS S U JTTSI-
2К t Уо4)поступают на входы одиннадцатого блока
Uia 5Ъ 73 .. ч2 -, г25 54 деления, на выходе которого получают
(Xn+MJ -Z
() )
поступают на входы пятого блока 48 деле-(Ufe, t U2J) (U )
ния, на выходе которого получают-L , 5)
30 + Шо-Ц) x° uS+ite -CXo+Mi) («.,) fue,u)
Сигнал с выхода третьего канала второ-Сигнал (65) и сигнал Х0 с выхода блока
го измерительного преобразователя 10 35 65 памяти поступают на входы седьмого
блока 61 умножения, на выходе которого
кполучают сигнал
23 Х0 -Mi +Ziг (иц-Ца|) ()|
поступает на вычитающий вход шестого 40I I ц,; иг) ( иа)блока 22 вычитания и на вход шестого блока «гУо ,- u u ) (U -us)l 66
38 сложения, а сигнал с выхода третьегоj-- -2-ii /
канала шестого измерительного преобразо-1 ибз+иг / (U 3 U6Vвателя 14
45 характеризующий осевую деформацию обькекта контроля на длине между сечениями
иез Х0 - MI - ZiA-A и Б-Б. Кроме того, сигнал (66) поступает
на вычитающий вход четырнадцатого блока
поступает на суммирующий вход шестого 30 вычитания, на суммирующий вход кото- блока 22 вычитания и на другой вход шесто- 5 поступает сигнал Х0 с блока 65 памяти, го блока 38 сложения. Сигналы с их выходов а с его выхода сигнал
IVM,)- .-.« 01/7 уин- „ ЛУ «П
U63-U23-2 (60) It V
(Xo-Mi)-Zt55 aL..J
2 К f X - М поступает на вход восьмого блока 62 умноU63 + U23 (61) жения, на другой вход которого поступает
( Х0 - Mi )г - Ziсигнал (62) с выхода шестого блока 49 деления. В результате на выходе восьмого блока 62 умножения получают сигнал
-г - ( v кл ( РбЗ - U23 Zi-(Xo-Mi)
(68)
характеризующий перемещение объекта контроля относительно начального положения по оси OZ.
Формула изобретения Информационно-измерительная система для определения компонент перемещений и деформаций объекта, содержащая трехкомпонентный датчик перемещений, включающий три ортогонально установленных чувствительных элемента, подключенный к датчику трехканальный измерительный преобразователь, каждый из каналов которого подключен к выходу соответстсвующего чувствительного элемента, отличающаяся тем, что, с целью повышения точности и информативности измерений, она снабжена восемью трех- компонентными датчиками, каждый из кото- рых включает три ортогонально установленных чувствительных элемента, семью трехканальными измерительными преобразователями, соответствующий канал каждого из которых подключен к соответствующему чувствительному элементу соответствующего трехкомпонентного датчика, шестнадцатью блоками вычитания, одиннадцатью блоками сложения, одиннадцатью блоками деления, десятью блоками умножения, блоком памяти, первый канал первого трехканального измерительного преобразователя подключен к вычитающему входу второго блока вычитания и к входу второго блока сложения, второй канал - к суммирующему входу третьего блока вычитания и к входу третьего блока сложения, третий канал - к суммирующему входу пятого блока вычитания и к входу пятого блока сложения, первый канал третьего трехканального измерительного преобразователя подключен к суммирующему входу второго блока вычитания и к второму входу второго блока сложения, второй канал - к вычитающему входу третьего блока вычитания и к второму входу третьего блока сложения, первый канал второго трехканального измерительного преобразователя подключен к вычитающему входу четвертого блока вычитания и к входу четвертого блока сложения, второй канал - к вычитающему входу первого блока вычитания и к входу первого блока сложения, третий канал - к вычитающему входу шестого блока вычитания и к входу шестого блока сложения, первый канал четвертого трехканального измерительного
преобразователя подключен к суммирующему входу четвертого блока вычитания и к второму входу четвертого блока сложения, второй канал - к суммирующему входу первого блока вычитания и к второму оходу первого блока сложения, первый канал пятого трехканального измерительного преобразователя подключен к вычитающему входу восьмого блока вычитания и к входу восьмо0 го блока сложения, второй канал - к вычитающему входу девятого блока вычитания и к входу девятого блока сложения, третий канал - к вычитающему входу пятого блока вычитания и к второму входу пятого блока
5 сложения, первый канал седьмого трехканального измерительного преобразователя подключен к суммирующему входу восьмого блока вычитания и к второму входу восьмого блока сложения, второй канал - к суммиру0 ющему входу девятого блока вычитания и к второму входу девятого блока сложения, первый канал шестого трехканального измерительного преобразователя подключен к вычитающему входу десятого блока вычи5 тания и к входу десятого блока сложения, второй канал - к суммирующему входу седьмого блока вычитания и к входу седьмого блока сложения, третий канал - к суммирующему входу шестого блока вычитания и к
0 второму входу шестого блока сложения, первый канал восьмого трехканального измерительного преобразователя подключен к суммирующему входу десятого блока вычитания и к второму входу десятого блока
5 сложения, второй канал - к вычитающему входу седьмого блока вычитания и к второму входу седьмого блока сложения, выходы каждой из пар блоков вычитания и сложения подключены к входам соответствующих им
0 блоков деления, выходы первого и второго, третьего и четвертого, седьмого и восьмого, девятого и десятого блоков деления подключены соответственно к соответствующим входам первого, второго, третьего и
5 четвертого блоков умножения, выход первого блока умножения подключен к вычитающему входу одиннадцатого блока вычитания, выход второго блока умножения подключен к суммирующему входу двенад0 цатого блока вычитания, выход третьего блока умножения подключен к вычитающему входу пятнадцатого блока вычитания, выход четвертого блока умножения подключен к суммирующему входу шестнадцатого бло5 ка вычитания, выходы первого, третьего, шестого, седьмого и девятого блоков деления подключены соответственно к входам пятого, шестого, восьмого, девятого и десятого блоков умножения, выходы пятого и шестого блоков деления подключены соответственно к вычитающему и суммирующему,входам тринадцатого блока вычитания и к входам одиннадцатого блока сложения, выходы которых подключены к входам одиннадцатого блока деления, который своим выходом подключен к входу седьмого блока умножения, выход седьмого блока умножения соединен с вычитающим входом четырнадцатого блока вычитания, выход которого соединен с вторым входом восьмого блока умножения, выход блока памяти соединен с третьими входами первого, второго, третьего, четвертого, вторыми входами пятого, шестого, седьмого, девятого и десятого блоков умножения, суммирующими входами одиннадцатого, четырнадцатого, пятнадцатого и вычитающими входами двенадцатого, шестнадцатого блоков вычитания, датчики размещены по четыре в двух параллельных плоскостях так, что их центры в каждой из плоскостей являются вершинами квадратов, а при соединении одноименных вершин квадратов образуется прямоугольный параллелепипед, оси чувствительности первых чувствительных элементов каждого из датчиков ориентированы по соответствующей диагонали соответствующего квадрата к его центру, оси чувствительности вторых
чувствительных элементов каждого из датчиков ориентированы в соответствующей плоскости перпендикулярно оси чувствительности первого чувствительного элемента, оси чувствительности третьих
чувствительных элементов каждого из датчиков ориентированы перпендикулярно соответствующей плоскости так, что образуют с направлениями двух других осей чувствительности первые координатные тройки, у
одной пары противолежащих в одной из плоскостей датчиков направление этих осей противоположно направлению тех же осей аналогичной пары датчиков во второй плоскости, у второй пары противолежащих в
одной из плоскостей датчиков направление этих осей встречно направлению тех же осей аналогичной пары датчиков во второй плоскости.
Фиг.2
Фиг.З
| Устройство для измерения пространственных перемещений | 1986 |
|
SU1379598A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Преобразователь перемещений | 1983 |
|
SU1193442A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
