Изобретение относится к навигации, более конкретно, к определению координат подвижного объекта.
Известен способ определения координат подвижного объекта, основанный на получении линии или поверхности положения путем непрерывного или дискретного интегрирования по времени ускорений или скоростей движения объекта относительно выбранной системы координат.
Наиболее близким техническим решением является способ определения координат подвижного объекта, включающий в себя измерение линейных и угловых параметров абсолютного движения объекта, определение углового положения системы координат, связанной с объектом, относительно ортодромической системы координат, определение относительной угловой и линейной скоростей объекта, определение проекций угловой скорости вращения Земли на оси ортодромической системы координат.
Известному способу определения координат присущ недостаток, заключающийся в том, что погрешность счисления координат имеет расходящийся характер при наличии в системе инструментальных погрешностей, погрешностей начальной выставки и прочих внутренних возмущений, что обусловлено необходимостью интегрирования линейных скоростей, что приводит к большим погрешностям в определении координат и необходимости привлечения показаний корректора.
Достигаемым техническим результатом является наряду с сохранением полезных свойств инерциального метода определения координат-автономностью, скрытностью, помехозащищенностью, всеширотностью, устранение вредного влияния двойного интегрирования.
Технический результат достигается тем, что в способе определения координат подвижного объекта, включающем в себя измерение линейных и угловых параметров абсолютного движения объекта, определение углового положения системы координат, связанный с объектом, относительно ортодромической системы координат, определение относительных угловой и линейной скоростей объекта, определение проекций угловой скорости вращения Земли на оси ортодромической системы координат, относительную угловую скорость объекта относительно ортодромической системы координат определяют путем дифференцирования углов, характеризующих ориентацию объекта в ортодромической системе координат, после определения проекций угловой скорости вращения Земли на оси ортодромической системы координат находят значения координат объекта в соответствии со следующими зависимостями
Uη= U sin χ˙cosλ
Uζ= U sin χ˙sinλ˙cosϕ+ U cos χ˙sinϕ
Uζ= U sin χ˙sinλ˙sinϕ - U cosχ˙cosϕ где Uη , Uζ , Uζ- проекции угловой скорости вращения Земли на оси ортодромической системы координат;
U - величина угловой скорости вращения Земли;
χ- угол наклона плоскости ортодромии;
λ, ϕ- ортодромические координаты, соответственно, долгота и широта.
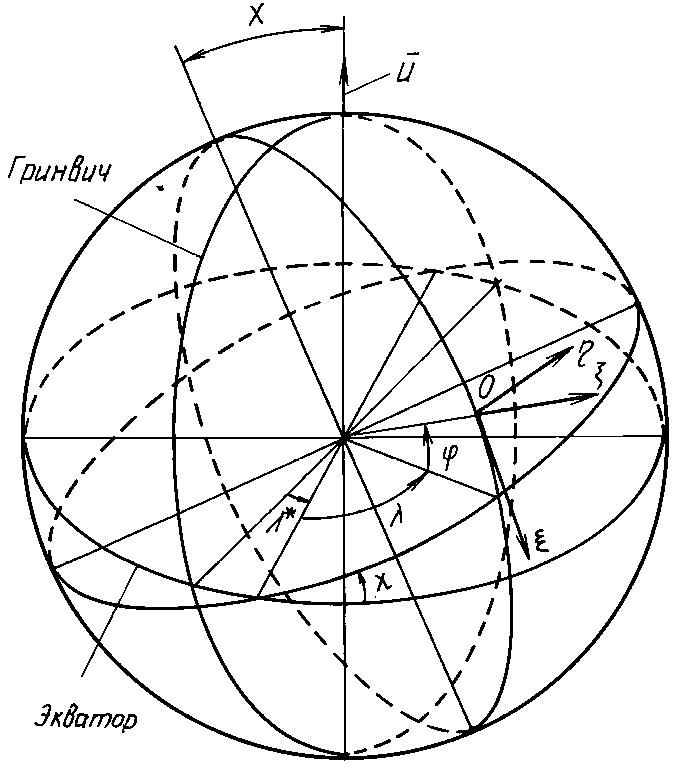
На чертеже дано схематичное изображение Земли и ортодромической системы координат и приняты следующие обозначения:
λ* - географическая долгота восходящего угла ортодромии;
χ- угол наклона плоскости ортодромии;
(˙)0 - местоположение объекта на Земле;
λ- ортодромическая долгота объекта;
ϕ- ортодромическая широта объекта;
Oη, Oζ, Oζ- оси ортодромической системы координат;
U - вектор угловой скорости собственного вращения Земли.
Способ определения координат подвижного объекта осуществляется следующим образом.
Определение координат предлагаемым способом требует определения проекций угловой скорости собственного вращения Земли на оси ортодромической системы координат. Для этого необходимо определить абсолютную угловую скорость объекта, например, при помощи датчиков угловой скорости, установленных на корпусе объекта, привести измеренную угловую скорость к осям ортодромической системы координат Оηζζ, т. е. сформировать ωηa, ωζa, ωζa. Относительную линейную скорость объекта в той же системе координат определяют инерциальным методом, рассчитывая угловую скорость системы координат относительно Земли в проекциях на ее собственные оси (Oη, Oζ, Oζ), вызванную перемещением объекта относительно Земли, получая таким образом ωη(l), ωζ(l), ωζ(l).
Решая задачу ориентации объекта относительно выбранной системы координат, получают параметры ориентации объекта-углы курса, тангажа и крена, дифференцируя полученные угловые параметры и приводя полученную таким образом относительную угловую скорость объекта к осям ортодромической системы координат, получают проекции угловой скорости объекта относительно выбранной системы координат, т. е. получают ωη(2), ωζ(2), ωζ(2). Определяют проекции угловой скорости собственного вращения Земли в соответствии со следующими зависимостями:
Uη= ωηa, ωη(l), ωη(2)
Uζ= ωζa, ωζ(l), ωζ(2)
Uζ= ωζa, ωζ(l), ωζ(2) где Uη, Uζ, Uζ - проекции угловой скорости собственного вращения Земли на оси ортодромической системы координат.
После определения проекций Uη, Uζ, Uζ находят координаты объекта, решая относительно них уравнения, связывающие указанные проекции угловой скорости собственного вращения Земли и координаты объекта. Уравнения, из которых находят координаты объекта имеют следующий вид:
Uη= U sin χ˙cosλ,
Uζ= U sin χ˙sinλ˙cosϕ+ U cos χ˙sinϕ ,
Uζ= U sin χ˙sinλ˙sinϕ - U cosχ˙cosϕ, где λ, ϕ- соответственно искомые долгота и широта объекта в ортодромической системе координат,
U - величина угловой скорости собственного вращения Земли, равная 2π/24 рад/ч,
χ - угол наклона плоскости ортодромии. (56) Сосновский А. А. и др. Авиационная радионавигация. М. : Транспорт, 1990
Селиванова Л. М. и др. Расчет ошибок инерциальных систем с применением ЭВМ. М. : МГТУ, 1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2011 |
|
RU2463560C1 |
| Устройство позиционирования транспортных средств | 2018 |
|
RU2689840C1 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА | 1999 |
|
RU2158903C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2011 |
|
RU2465555C1 |
| ГИРОСКОП-АКСЕЛЕРОМЕТР С ЭЛЕКТРОСТАТИЧЕСКИМ ПОДВЕСОМ РОТОРА И ПОЛНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИЕЙ | 2014 |
|
RU2568147C1 |
| КОМПЛЕКСНАЯ ИНФОРМАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2263280C1 |
| ИЗМЕРИТЕЛЬ КУРСА ПОДВИЖНОГО ОБЪЕКТА | 2003 |
|
RU2241208C1 |
| КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1992 |
|
RU2115890C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТЕКУЩИХ ЗНАЧЕНИЙ КООРДИНАТ ДВИЖУЩИХСЯ ОБЪЕКТОВ | 1966 |
|
SU182347A1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2015 |
|
RU2614192C1 |
Изобретение относится к навигации. Техническим результатом является исключение погрешности определения координат, вызванной наличием двойного интегрирования при использовании инерциального метода счисления координат. Технический результат достигается тем, что координаты объекта определяются путем решения уравнений, связывающих искомые координаты объекта с предварительно полученными проекциями угловой скорости собственного вращения Земли на оси ортодромической системы координат. 1 ил.
СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ НЕПОДВИЖНОГО ОБЪЕКТА, включающий в себя измерение линейных и угловых параметров абсолютного движения объекта, определение углового положения системы координат, связанной с объектом, относительно ортодромической системы координат, определение относительных угловой и линейной скоростей объекта, определение проекций угловой скорости вращения Земли на оси ортодромической системы координат, отличающийся тем, что относительную угловую скорость объекта относительно ортодромической системы координат определяют путем дифференцирования углов, характеризующих ориентацию объекта в ортодромической системе координат, после определения проекций угловой скорости вращения Земли на оси ортодромической системы координат находят значения координат объекта в соответствии со следующими зависимостями:
Uη = U˙sinχcosλ;
Uζ = U˙sinχ˙sinλ˙cosϕ + Ucosχ˙sinϕ;
Uζ = U˙sinχ˙sinλ˙sinϕ - Ucosχ˙cosϕ,
где Uη , Uζ , Uζ - проекции угловой скорости вращения Земли на оси ортодромической системы координат;
U - величина угловой скорости вращения Земли;
χ - угол наклона плоскости ортодромии;
λ , ϕ - ортодромические координаты, соответственно долгота и широта.
