Текст описания приведен в факсимильном виде.


| название | год | авторы | номер документа |
|---|---|---|---|
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2011 |
|
RU2463560C1 |
| СПОСОБ КОМПЛЕКСИРОВАНИЯ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ И КОМБИНИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1993 |
|
RU2082098C1 |
| КОМБИНИРОВАННАЯ БЕСПЛАТФОРМЕННАЯ АСТРОИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2017 |
|
RU2654965C1 |
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1998 |
|
RU2148796C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБОК БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ВНЕШНЕЙ ПОЗИЦИОННОЙ И СКОРОСТНОЙ ИНФОРМАЦИИ | 2017 |
|
RU2668658C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА, КОРРЕКТИРУЕМАЯ ПО ВНЕШНЕЙ ПОЗИЦИОННОЙ И СКОРОСТНОЙ ИНФОРМАЦИИ | 2017 |
|
RU2668659C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170410C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
RU2016383C1 |
| АППАРАТУРА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА | 2002 |
|
RU2221728C1 |
Изобретение относится к измерительной технике и может найти применение в интегрированных инерциально-спутниковых навигационных системах. Технический результат - повышение точности навигационного комплекса. Для достижения данного результата навигационный комплекс содержит инерциальную навигационную систему (ИНС) с гироплатформой (ГП), навигационный вычислитель, фильтр-идентификатор оценок (ФИО), специальный вычислитель, приемник спутниковой навигационной системы (СНС). В него введены одиннадцать сумматоров, четыре устройства умножения, в специальном вычислителе выполнены вычислительные устройства для расчета переменных коэффициентов математической модели погрешностей ИНС. В ФИО выполнены устройство формирования данных рассогласования географических координат и линейных скоростей между ИНС и СНС с одиннадцатью преобразователями входных воздействий ФИО, устройства формирования оценки погрешности географической широты, оценки погрешности географической долготы, оценки погрешности курса, оценки погрешности скоростей по осям ГП, оценки углов рассогласования по осям ГП, оценки дрейфов по осям ГП. 16 ил.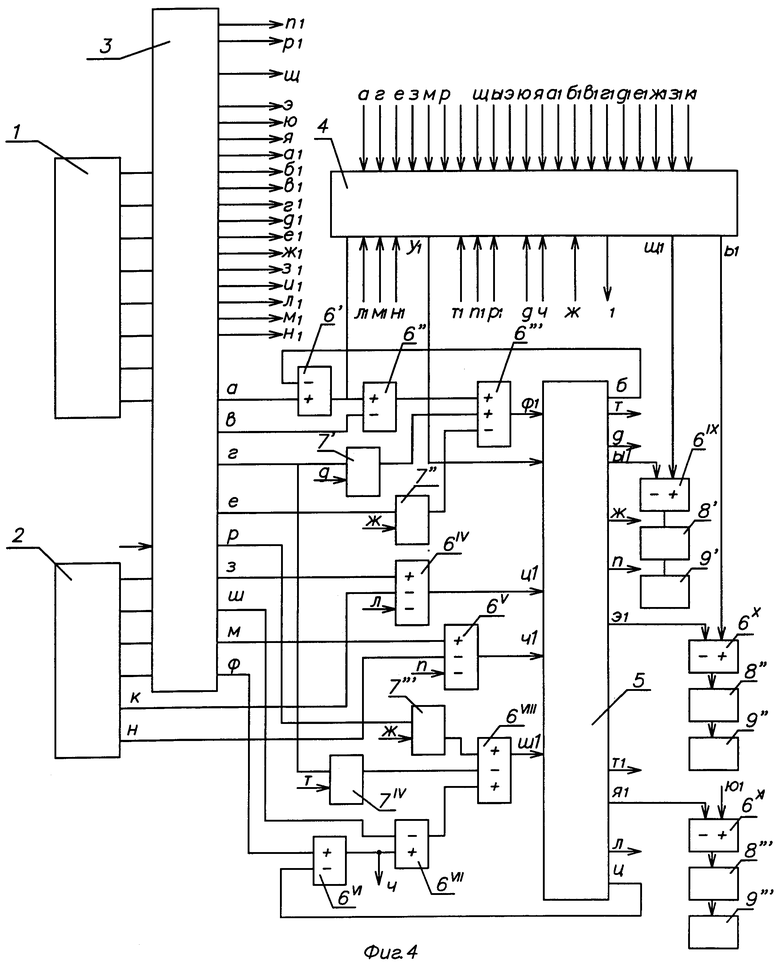
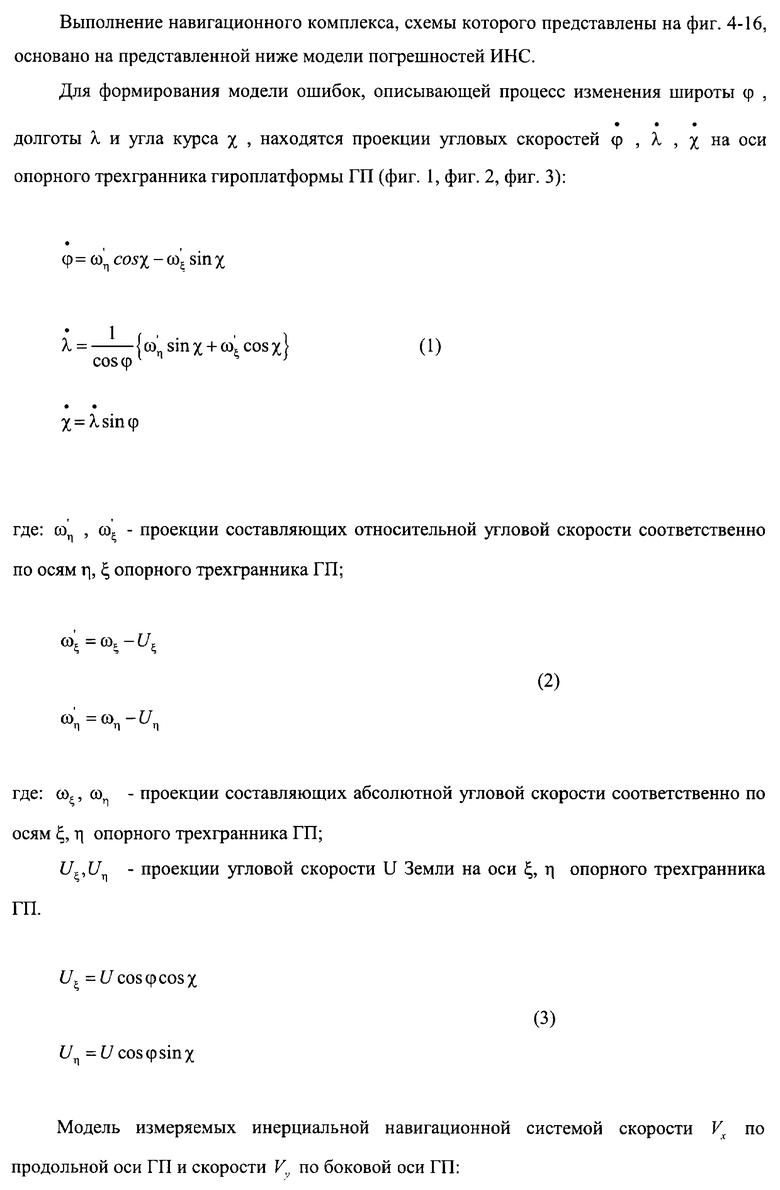
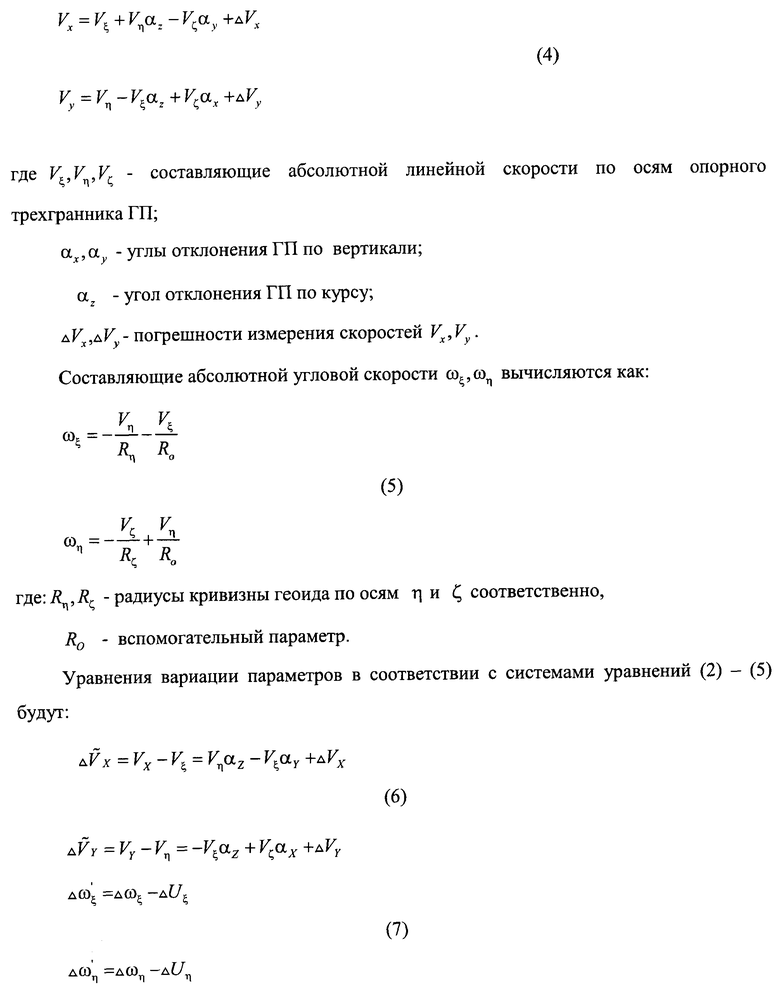
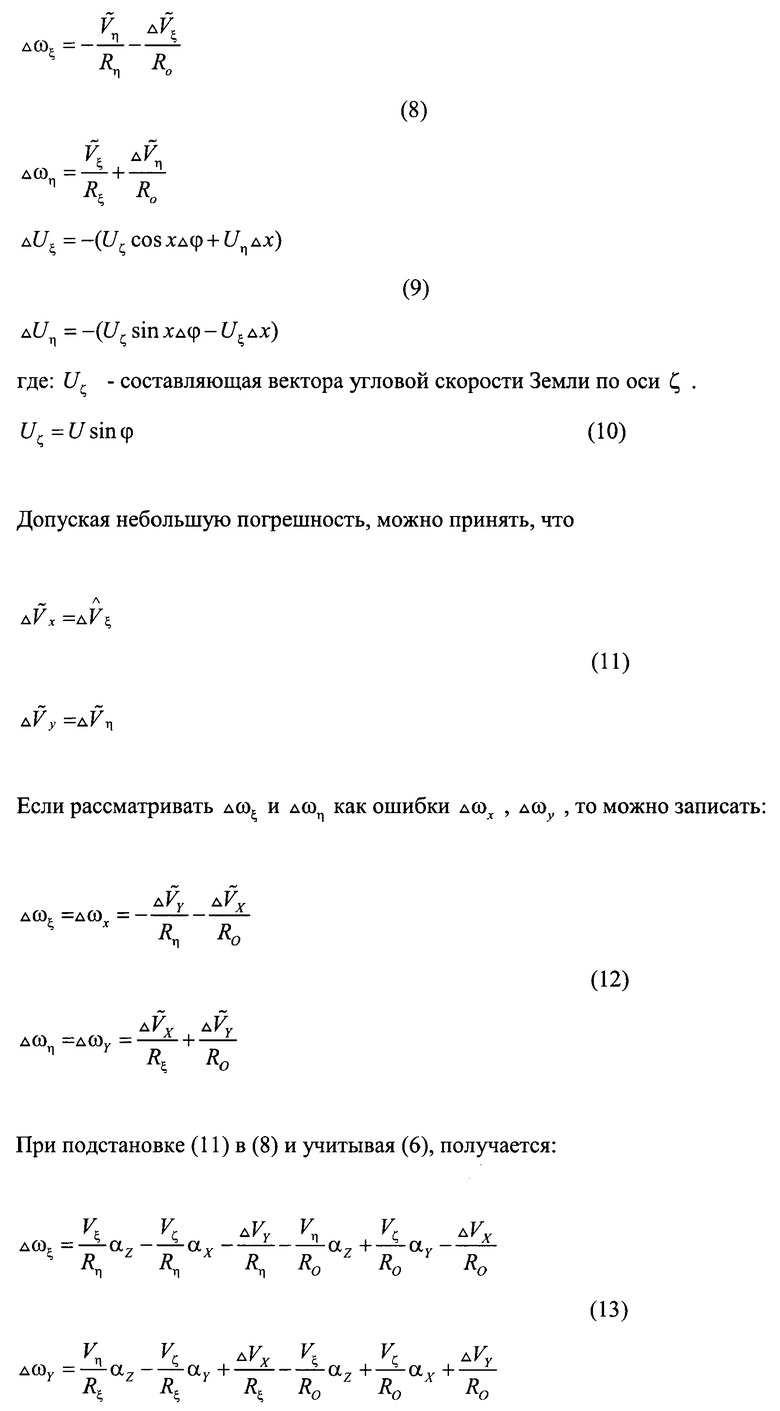
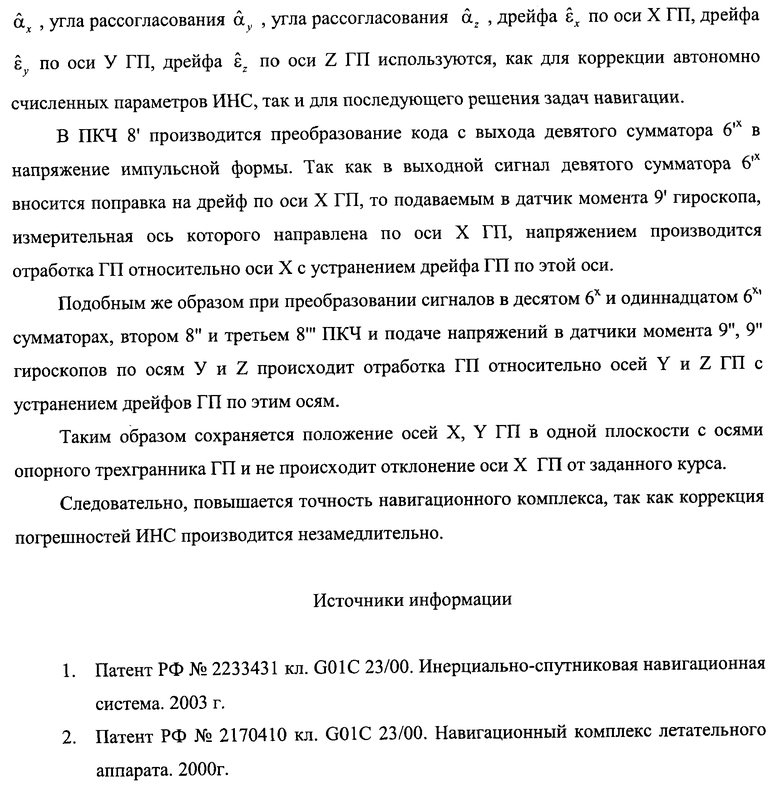
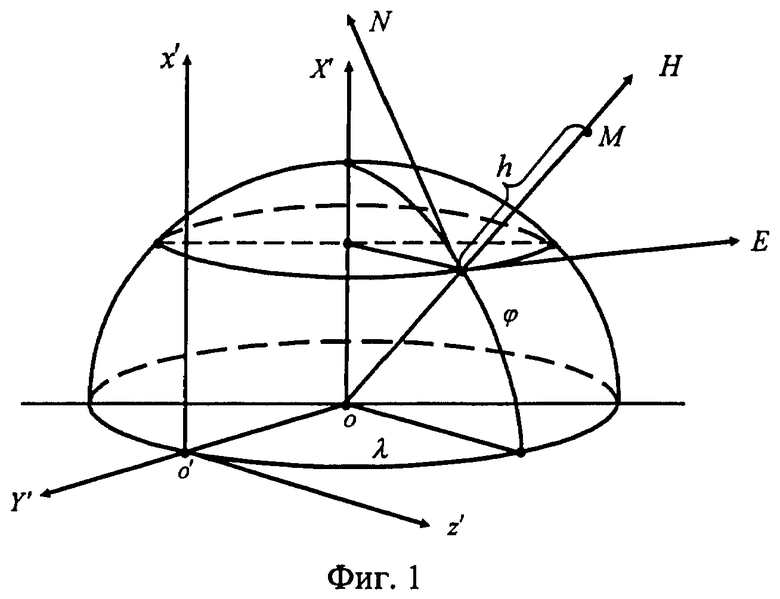
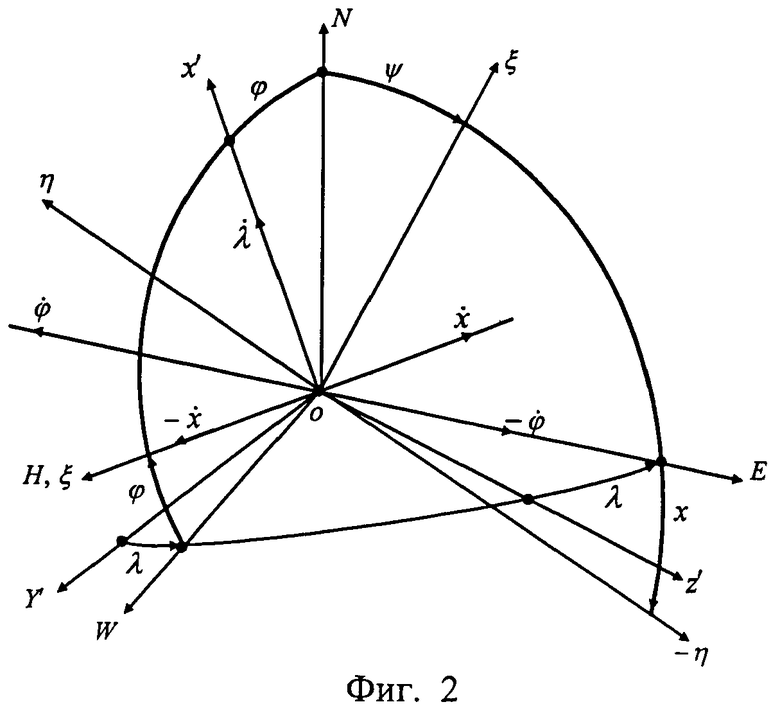
Навигационный комплекс, содержащий инерциальную навигационную систему (ИНС) с гироплатформой (ГП) в инерциальной системе координат OXYZ, системе координат OX'Y'Z', связанной с Землей, географическим сопровождающим трехгранником ONHE, опорным трехгранником ГП Oξηζ, реальным трехгранником, связанным с ГП, навигационный вычислитель фильтр-идентификатор оценок (ФИО), приемник спутниковой навигационной системы (СНС), причем на основании ГП установлены первый, второй и третий акселерометры, измерительные оси которых направлены соответственно по осям X, Y, Z ГП, на основании ГП установлены гироскопы, измерительные оси которых направлены по осям X, Y, Z ГП соответственно, по каждой из осей X, Y, Z ГП установлены синусно-косинусный вращающийся трансформатор (СКВТ) и двигатель стабилизации, в ИНС выполнены преобразователи аналог-код для обработки сигналов акселерометров и СКВТ, преобразователи код-частота (ПКЧ) для стабилизации и управления ГП, выходы ИНС с данными о приращениях скоростей δVx, δVy по осям X, Y ГП соответственно, о составляющих абсолютных скоростей Vξ, Vη, Vζ, о гироскопическом курсе Ψ, об углах крена γ, тангажа θ соединены с одними из входов навигационного вычислителя, в приемнике СНС образованы выходы с данными о географической широте φснс, географической долготе λснс, курсе χСНС, северной  восточной
восточной  и вертикальной
и вертикальной  составляющих относительной скорости, в навигационном вычислителе выполнены вычислительные средства для расчета выдаваемых сигналов географической широты φ, географической долготы λ, азимута χ ГП, линейных скоростей Vx, Vy по осям X, Y ГП соответственно, проекции Uξ, Uη, Uζ угловой скорости U Земли на оси опорного трехгранника ГП, абсолютных ускорений Wξ, Wη, Wζ, относительных скоростей υξ, υη, абсолютных угловых скоростей ωξ, ωη, скоростей UN, UE в осях сопровождающего трехгранника ГП, радиусов кривизны Rξ, Rη земного эллипсоида по сечениям, проходящим через оси ГП, радиусов кривизны RN меридиана, RE параллели, вспомогательного параметра RO, отличающийся тем, что в него введено вычислительное устройство для расчета угловых скоростей (ВУРУС), в цепи соединения входов и выходов после навигационного вычислителя введены одиннадцать сумматоров (с первого по одиннадцатый), первое, второе, третье, четвертое устройства умножения, выходы приемника СНС с данными φснс, χ,
составляющих относительной скорости, в навигационном вычислителе выполнены вычислительные средства для расчета выдаваемых сигналов географической широты φ, географической долготы λ, азимута χ ГП, линейных скоростей Vx, Vy по осям X, Y ГП соответственно, проекции Uξ, Uη, Uζ угловой скорости U Земли на оси опорного трехгранника ГП, абсолютных ускорений Wξ, Wη, Wζ, относительных скоростей υξ, υη, абсолютных угловых скоростей ωξ, ωη, скоростей UN, UE в осях сопровождающего трехгранника ГП, радиусов кривизны Rξ, Rη земного эллипсоида по сечениям, проходящим через оси ГП, радиусов кривизны RN меридиана, RE параллели, вспомогательного параметра RO, отличающийся тем, что в него введено вычислительное устройство для расчета угловых скоростей (ВУРУС), в цепи соединения входов и выходов после навигационного вычислителя введены одиннадцать сумматоров (с первого по одиннадцатый), первое, второе, третье, четвертое устройства умножения, выходы приемника СНС с данными φснс, χ,  ,
,  ,
,  подключены к другим входам навигационного вычислителя, в навигационном вычислителе выполнены устройства для расчета составляющих
подключены к другим входам навигационного вычислителя, в навигационном вычислителе выполнены устройства для расчета составляющих  ,
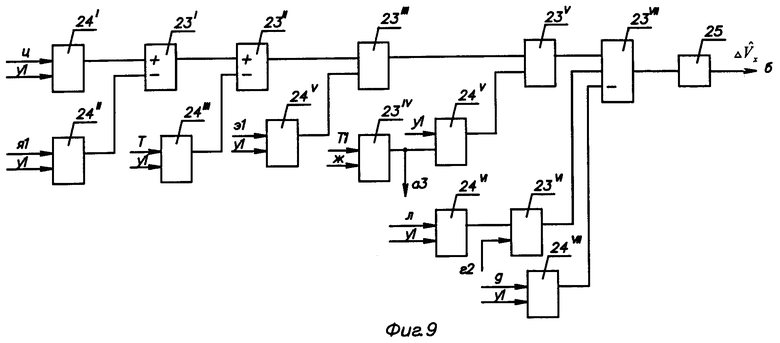
,  , абсолютной скорости в проекциях на оси опорного трехгранника ГП, выход с данными скорости Vx навигационного вычислителя подсоединен к входу первого сумматора, к инверсному входу которого подсоединен выход ФИО с оценкой погрешности скорости
, абсолютной скорости в проекциях на оси опорного трехгранника ГП, выход с данными скорости Vx навигационного вычислителя подсоединен к входу первого сумматора, к инверсному входу которого подсоединен выход ФИО с оценкой погрешности скорости  выход первого сумматора подключен к одному из входов ВУРУС и к входу второго сумматора, к инверсному входу которого подсоединен выход данных скорости
выход первого сумматора подключен к одному из входов ВУРУС и к входу второго сумматора, к инверсному входу которого подсоединен выход данных скорости  навигационного вычислителя, выход навигационного вычислителя с данными скорости Vζ подсоединен к одному входу первого устройства умножения, к другому входу которого подключен выход ФИО с данными оценки угла рассогласования
навигационного вычислителя, выход навигационного вычислителя с данными скорости Vζ подсоединен к одному входу первого устройства умножения, к другому входу которого подключен выход ФИО с данными оценки угла рассогласования  между осью Х реального трехгранника ГП и осью ξ опорного трехгранника ГП, выход навигационного вычислителя с данными скорости Vη подсоединен к одному входу второго устройства умножения, к другому входу которого подсоединен выход ФИО с данными оценки угла рассогласования
между осью Х реального трехгранника ГП и осью ξ опорного трехгранника ГП, выход навигационного вычислителя с данными скорости Vη подсоединен к одному входу второго устройства умножения, к другому входу которого подсоединен выход ФИО с данными оценки угла рассогласования  между осью Y реального трехгранника ГП и осью η опорного трехгранника ГП, выход второго сумматора подключен к первому входу третьего сумматора, к второму входу которого подключен выход первого устройства умножения, а к инверсному входу подсоединен выход второго устройства умножения, к входу четвертого сумматора подсоединен выход навигационного вычислителя с данными широты φ, выход приемника СНС с данными широты φснс подключен к первому инверсному входу четвертого сумматора, к второму инверсному входу которого подсоединен выход ФИО с данными оценки погрешности
между осью Y реального трехгранника ГП и осью η опорного трехгранника ГП, выход второго сумматора подключен к первому входу третьего сумматора, к второму входу которого подключен выход первого устройства умножения, а к инверсному входу подсоединен выход второго устройства умножения, к входу четвертого сумматора подсоединен выход навигационного вычислителя с данными широты φ, выход приемника СНС с данными широты φснс подключен к первому инверсному входу четвертого сумматора, к второму инверсному входу которого подсоединен выход ФИО с данными оценки погрешности  широты, выход навигационного вычислителя с данными долготы λ подсоединен к входу пятого сумматора, к первому инверсному входу которого подключен выход приемника СНС с данными долготы λснс, а к второму инверсному входу подключен выход ФИО с данными оценки погрешности
широты, выход навигационного вычислителя с данными долготы λ подсоединен к входу пятого сумматора, к первому инверсному входу которого подключен выход приемника СНС с данными долготы λснс, а к второму инверсному входу подключен выход ФИО с данными оценки погрешности  долготы, выход навигационного вычислителя с данными скорости Vξ подсоединен к одному из входов третьего устройства умножения, к другому входу которого подключен выход ФИО с данными оценки угла рассогласования , выход навигационного вычислителя с данными скорости Vζ подсоединен к первому входу четвертого устройства умножения, к второму входу которого подсоединен выход ФИО с оценкой угла рассогласования
долготы, выход навигационного вычислителя с данными скорости Vξ подсоединен к одному из входов третьего устройства умножения, к другому входу которого подключен выход ФИО с данными оценки угла рассогласования , выход навигационного вычислителя с данными скорости Vζ подсоединен к первому входу четвертого устройства умножения, к второму входу которого подсоединен выход ФИО с оценкой угла рассогласования  между осью Z реального трехгранника ГП и осью ζ опорного трехгранника ГП, выход навигационного вычислителя с данными скорости Vу подключен к входу шестого сумматора, к инверсному входу которого подсоединен выход ФИО оценки погрешности
между осью Z реального трехгранника ГП и осью ζ опорного трехгранника ГП, выход навигационного вычислителя с данными скорости Vу подключен к входу шестого сумматора, к инверсному входу которого подсоединен выход ФИО оценки погрешности  определения скорости Vy, выход шестого сумматора подключен к одному из входов ВУРУС и входу седьмого сумматора, инверсный вход которого соединен с выходом навигационного вычислителя с данными скорости
определения скорости Vy, выход шестого сумматора подключен к одному из входов ВУРУС и входу седьмого сумматора, инверсный вход которого соединен с выходом навигационного вычислителя с данными скорости  , выход третьего устройства умножения подключен к первому входу восьмого сумматора, к второму входу которого подсоединен выход седьмого сумматора, к инверсному входу восьмого сумматора подключен выход четвертого устройства умножения, выходы навигационного вычислителя с данными Vx, Vy, Vη, Vζ, Vξ, φ, λ, Wξ, Wη, Wζ, un, ue, ωξ, ωη, υξ, υη, Uζ, Uξ, Uη, Rη, Rξ, RO, RN, RE, χ соединены с входами ВУРУС, в ВУРУС выполнены вычислительные устройства для расчета угловых скоростей
, выход третьего устройства умножения подключен к первому входу восьмого сумматора, к второму входу которого подсоединен выход седьмого сумматора, к инверсному входу восьмого сумматора подключен выход четвертого устройства умножения, выходы навигационного вычислителя с данными Vx, Vy, Vη, Vζ, Vξ, φ, λ, Wξ, Wη, Wζ, un, ue, ωξ, ωη, υξ, υη, Uζ, Uξ, Uη, Rη, Rξ, RO, RN, RE, χ соединены с входами ВУРУС, в ВУРУС выполнены вычислительные устройства для расчета угловых скоростей  ,
,  ,
,  , составляющих
, составляющих  ,
,  относительной угловой скорости по осям географического трехгранника, составляющих
относительной угловой скорости по осям географического трехгранника, составляющих  ,
,  ,
,  ускорения свободного падения, переменных коэффициентов:
ускорения свободного падения, переменных коэффициентов:



k21=Uζ; k22=Vη; k23=Vηωη; k24=Vζ;  ;
;
k26=VηUN+U2REcos2φcosχ;  ; k28=Uξ; k29=Vξωξ;
; k28=Uξ; k29=Vξωξ;
k30=Vξ; k31=Vζ; k32=U2REcos2φsinχ-VξUN;

 k36=Uξ;
k36=Uξ; 
 k40=Uζ;
k40=Uζ; 
k43=ωξ; k44=ωη;
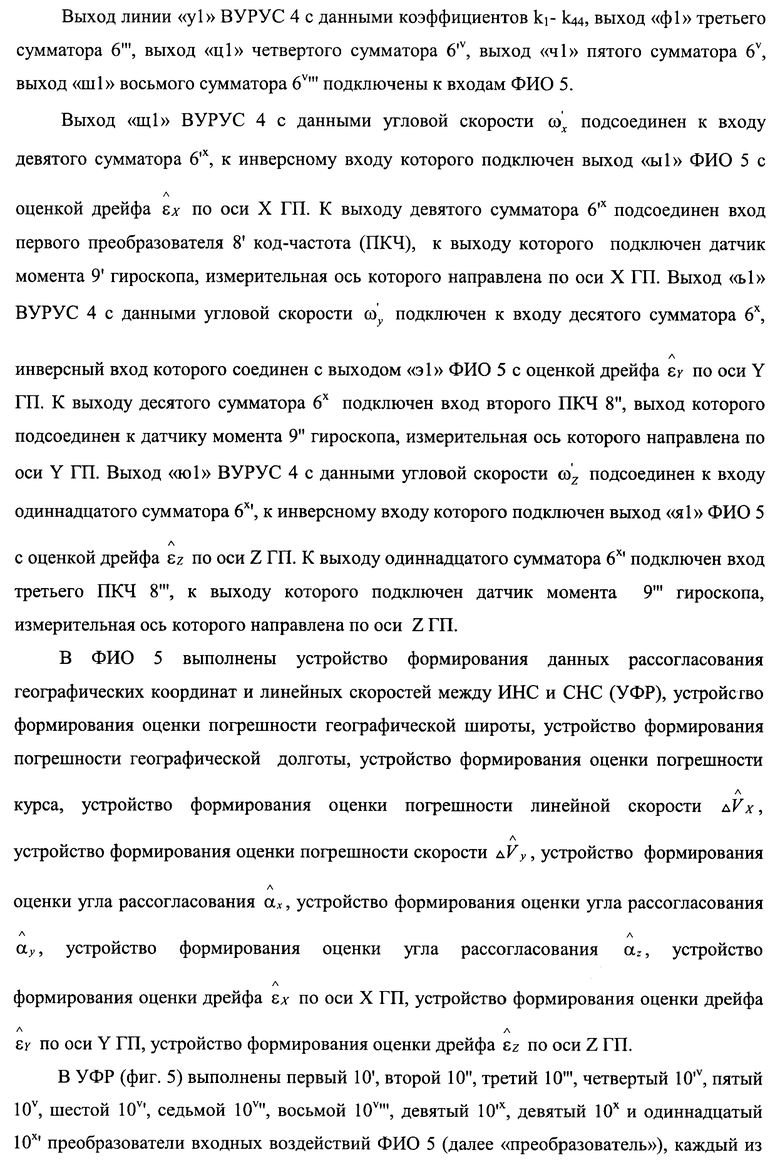
в ФИО выполнен выход оценки погрешности курса  ; выход линии ВУРУС с данными коэффициентов k1-k44, выходы третьего, четвертого, пятого и восьмого сумматоров подключены к входам ФИО, выход ВУРУС с данными угловой скорости
; выход линии ВУРУС с данными коэффициентов k1-k44, выходы третьего, четвертого, пятого и восьмого сумматоров подключены к входам ФИО, выход ВУРУС с данными угловой скорости  подсоединен к входу девятого сумматора, к инверсному входу которого подключен выход ФИО с оценкой дрейфа
подсоединен к входу девятого сумматора, к инверсному входу которого подключен выход ФИО с оценкой дрейфа  по оси Х ГП, к выходу девятого сумматора подсоединен вход первого преобразователя «код-частота» (ПКЧ), выход ВУРУС с данными угловой скорости
по оси Х ГП, к выходу девятого сумматора подсоединен вход первого преобразователя «код-частота» (ПКЧ), выход ВУРУС с данными угловой скорости  подключен к входу десятого сумматора, инверсный вход которого соединен с выходом ФИО с оценкой дрейфа
подключен к входу десятого сумматора, инверсный вход которого соединен с выходом ФИО с оценкой дрейфа  по оси У ГП, к выходу десятого сумматора подключен вход второго ПКЧ, выход ВУРУС с данными угловой скорости
по оси У ГП, к выходу десятого сумматора подключен вход второго ПКЧ, выход ВУРУС с данными угловой скорости  подсоединен к входу одиннадцатого сумматора, к инверсному входу которого подключен выход ФИО с оценкой дрейфа
подсоединен к входу одиннадцатого сумматора, к инверсному входу которого подключен выход ФИО с оценкой дрейфа  по оси Z ГП, к выходу одиннадцатого сумматора подключен вход третьего ПКЧ; в ФИО выполнены устройство формирования данных рассогласования географических координат и линейных скоростей между ИНС и СНС (УФР), устройство формирования оценки погрешности географической широты, устройство формирования оценки погрешности географической долготы, устройство формирования оценки погрешности курса, устройство формирования оценки погрешности скорости
по оси Z ГП, к выходу одиннадцатого сумматора подключен вход третьего ПКЧ; в ФИО выполнены устройство формирования данных рассогласования географических координат и линейных скоростей между ИНС и СНС (УФР), устройство формирования оценки погрешности географической широты, устройство формирования оценки погрешности географической долготы, устройство формирования оценки погрешности курса, устройство формирования оценки погрешности скорости  , устройство формирования оценки погрешности скорости
, устройство формирования оценки погрешности скорости  , устройство формирования оценки угла рассогласования
, устройство формирования оценки угла рассогласования  , устройство формирования оценки угла рассогласования
, устройство формирования оценки угла рассогласования  , устройство формирования оценки угла рассогласования
, устройство формирования оценки угла рассогласования  , устройство формирования оценки дрейфа
, устройство формирования оценки дрейфа  по оси Х ГП; устройство формирования оценки дрейфа
по оси Х ГП; устройство формирования оценки дрейфа  по оси Y ГП; устройство формирования оценки дрейфа
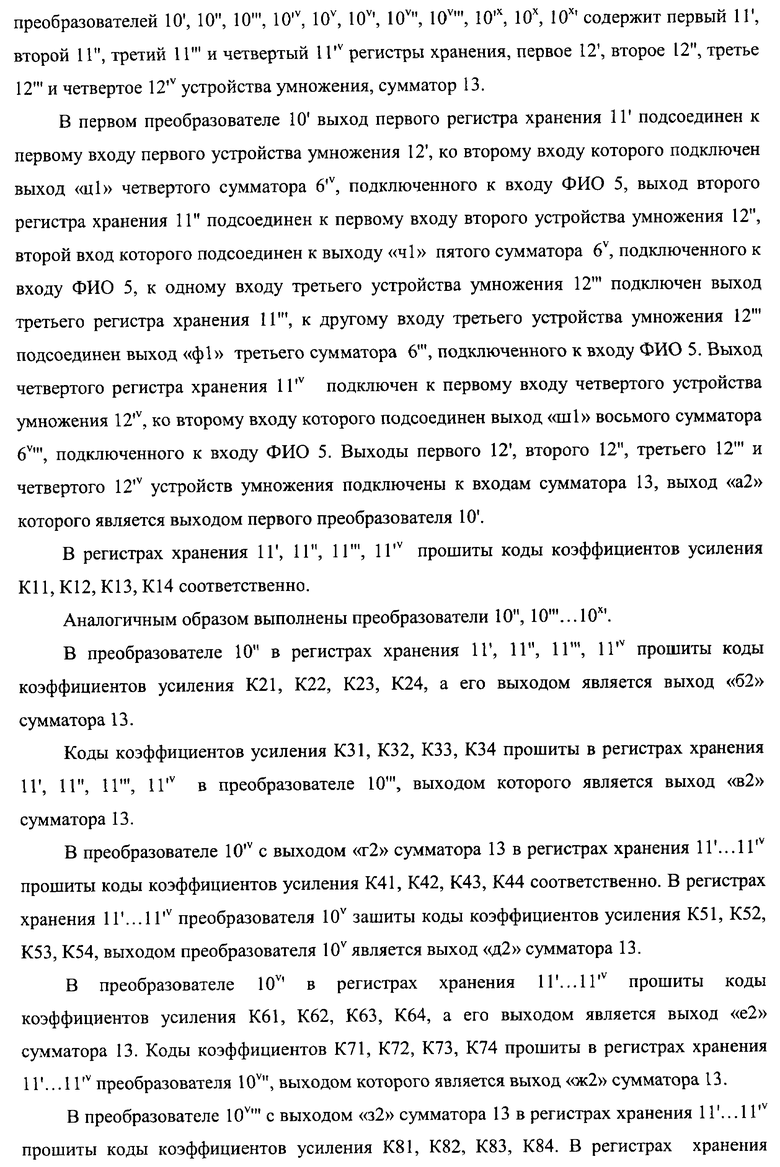
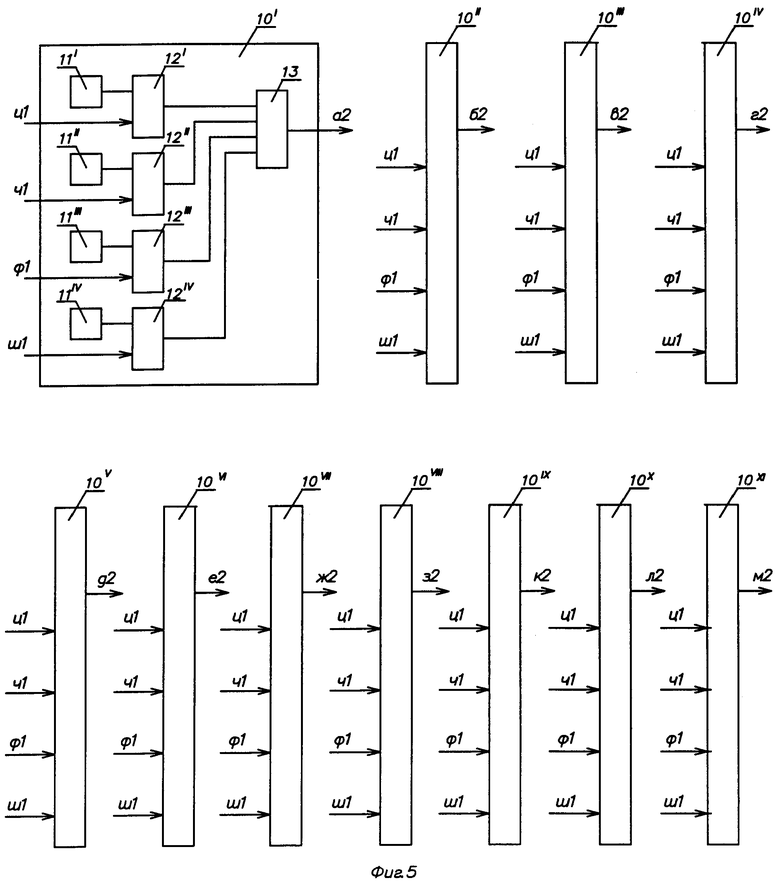
по оси Y ГП; устройство формирования оценки дрейфа  по оси Z ГП; в УФР выполнено одиннадцать преобразователей входных воздействий ФИО, каждый преобразователь входных воздействий ФИО содержит первый, второй, третий и четвертый регистры хранения, первое, второе, третье и четвертое устройства умножения, сумматор, выход первого регистра хранения подсоединен к первому входу первого устройства умножения, к второму входу которого подключен выход четвертого сумматора, подключенного к входу ФИО, выход второго регистра хранения подсоединен к первому входу второго устройства умножения, второй вход которого подсоединен к выходу пятого сумматора, подключенного к входу ФИО, к одному входу третьего устройства умножения подключен выход третьего регистра хранения, к другому входу третьего устройства умножения подсоединен выход третьего сумматора, подключенного к входу ФИО, выход четвертого регистра хранения подключен к первому входу четвертого устройства умножения, к второму входу которого подсоединен выход восьмого сумматора, подключенного к входу ФИО, выходы первого, второго, третьего и четвертого устройств умножения подключены к входам сумматора, в каждом из первого, второго, третьего и четвертого регистров хранения прошит код коэффициента усиления, соответствующий тому устройству умножения, к входу которого он подключен, во всех других преобразователях входных воздействий ФИО в регистрах хранения прошиты коды, соответствующие тому устройству умножения, к входу которого подключен соответствующий регистр хранения; в устройстве формирования оценки погрешности географической широты выполнены первое, второе, третье, четвертое, пятое и шестое устройства умножения, первый, второй, третий и четвертый сумматоры, интегратор, к входам первого устройства умножения подключены выход ФИО с оценкой угла рассогласования
по оси Z ГП; в УФР выполнено одиннадцать преобразователей входных воздействий ФИО, каждый преобразователь входных воздействий ФИО содержит первый, второй, третий и четвертый регистры хранения, первое, второе, третье и четвертое устройства умножения, сумматор, выход первого регистра хранения подсоединен к первому входу первого устройства умножения, к второму входу которого подключен выход четвертого сумматора, подключенного к входу ФИО, выход второго регистра хранения подсоединен к первому входу второго устройства умножения, второй вход которого подсоединен к выходу пятого сумматора, подключенного к входу ФИО, к одному входу третьего устройства умножения подключен выход третьего регистра хранения, к другому входу третьего устройства умножения подсоединен выход третьего сумматора, подключенного к входу ФИО, выход четвертого регистра хранения подключен к первому входу четвертого устройства умножения, к второму входу которого подсоединен выход восьмого сумматора, подключенного к входу ФИО, выходы первого, второго, третьего и четвертого устройств умножения подключены к входам сумматора, в каждом из первого, второго, третьего и четвертого регистров хранения прошит код коэффициента усиления, соответствующий тому устройству умножения, к входу которого он подключен, во всех других преобразователях входных воздействий ФИО в регистрах хранения прошиты коды, соответствующие тому устройству умножения, к входу которого подключен соответствующий регистр хранения; в устройстве формирования оценки погрешности географической широты выполнены первое, второе, третье, четвертое, пятое и шестое устройства умножения, первый, второй, третий и четвертый сумматоры, интегратор, к входам первого устройства умножения подключены выход ФИО с оценкой угла рассогласования  и выход линии ВУРУС с коэффициентом k1, выход ФИО с оценкой угла рассогласования
и выход линии ВУРУС с коэффициентом k1, выход ФИО с оценкой угла рассогласования  и выход линии ВУРУС с коэффициентом k2 подсоединены к входам второго устройства умножения, к входам третьего устройства умножения подключен выход ФИО с оценкой угла рассогласования
и выход линии ВУРУС с коэффициентом k2 подсоединены к входам второго устройства умножения, к входам третьего устройства умножения подключен выход ФИО с оценкой угла рассогласования  и выход линии ВУРУС с коэффициентом k3, выходы первого и второго устройств умножения подключены к входам первого сумматора, к инверсному входу которого подсоединен выход третьего устройства умножения, к входам четвертого устройства умножения подсоединены выход ФИО с оценкой погрешности скорости
и выход линии ВУРУС с коэффициентом k3, выходы первого и второго устройств умножения подключены к входам первого сумматора, к инверсному входу которого подсоединен выход третьего устройства умножения, к входам четвертого устройства умножения подсоединены выход ФИО с оценкой погрешности скорости  и выход линии ВУРУС с коэффициентом k4, выход ФИО с оценкой погрешности скорости
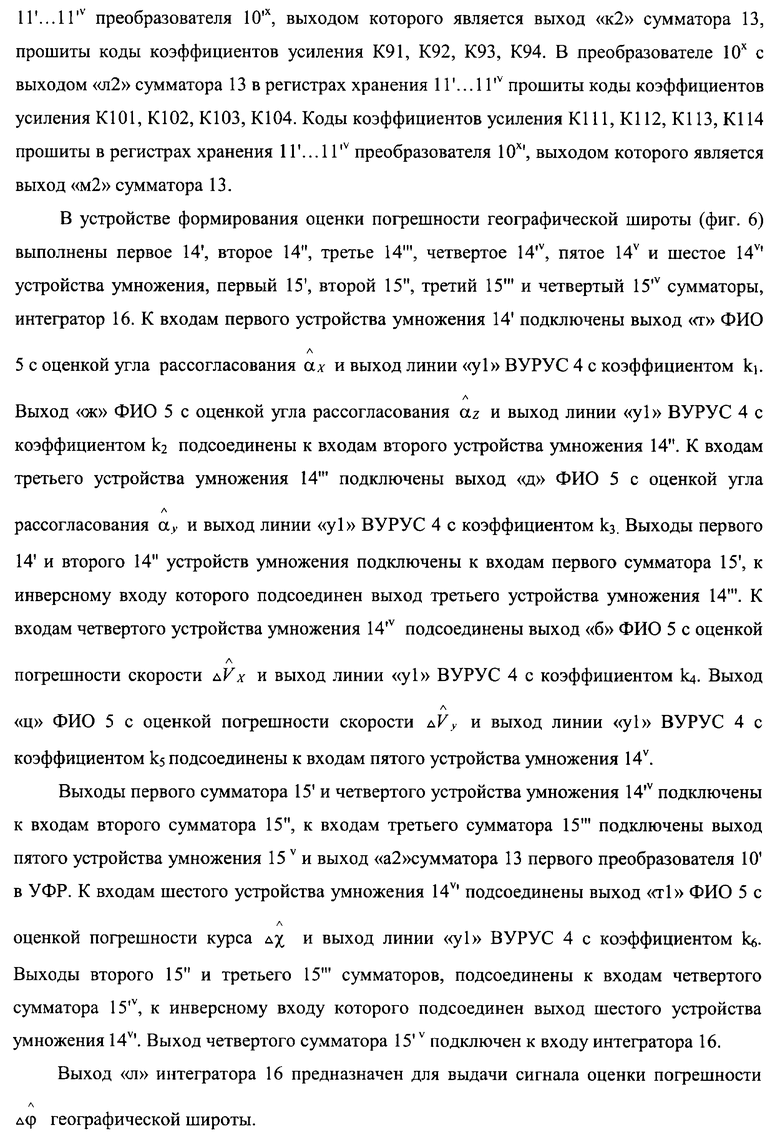
и выход линии ВУРУС с коэффициентом k4, выход ФИО с оценкой погрешности скорости  и выход линии ВУРУС с коэффициентом k5 подсоединены к входам пятого устройства умножения, выходы первого сумматора и четвертого устройства умножения подключены к входам второго сумматора, к входам третьего сумматора подключены выход пятого устройства умножения и выход сумматора первого преобразователя входных воздействий ФИО в УФР, к входам шестого устройства умножения подсоединены выход ФИО с оценкой погрешности курса
и выход линии ВУРУС с коэффициентом k5 подсоединены к входам пятого устройства умножения, выходы первого сумматора и четвертого устройства умножения подключены к входам второго сумматора, к входам третьего сумматора подключены выход пятого устройства умножения и выход сумматора первого преобразователя входных воздействий ФИО в УФР, к входам шестого устройства умножения подсоединены выход ФИО с оценкой погрешности курса  и выход линии ВУРУС с коэффициентом k6, выходы второго и третьего сумматоров подсоединены к входам четвертого сумматора, к инверсному входу которого подсоединен выход шестого устройства умножения, выход четвертого сумматора подключен к входу интегратора, выход интегратора предназначен для выдачи сигнала оценки погрешности
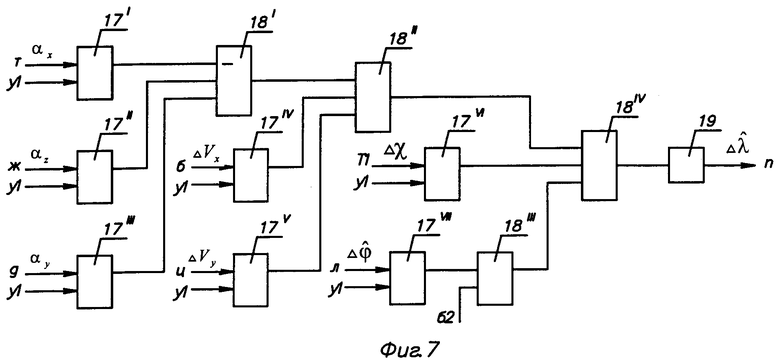
и выход линии ВУРУС с коэффициентом k6, выходы второго и третьего сумматоров подсоединены к входам четвертого сумматора, к инверсному входу которого подсоединен выход шестого устройства умножения, выход четвертого сумматора подключен к входу интегратора, выход интегратора предназначен для выдачи сигнала оценки погрешности  географической широты; в устройстве формирования оценки погрешности географической долготы выполнены первое, второе, третье, четвертое, пятое, шестое и седьмое устройства умножения, первый, второй, третий и четвертый сумматоры, интегратор, к входам первого устройства умножения подсоединен выход ФИО с оценкой угла рассогласования
географической широты; в устройстве формирования оценки погрешности географической долготы выполнены первое, второе, третье, четвертое, пятое, шестое и седьмое устройства умножения, первый, второй, третий и четвертый сумматоры, интегратор, к входам первого устройства умножения подсоединен выход ФИО с оценкой угла рассогласования  и выход линии ВУРУС с коэффициентом k7, выход ФИО с оценкой угла рассогласования и выход линии ВУРУС с коэффициентом k8 подключены к входам второго устройства умножения, к входам третьего устройства умножения подсоединены выход ФИО с оценкой угла рассогласования
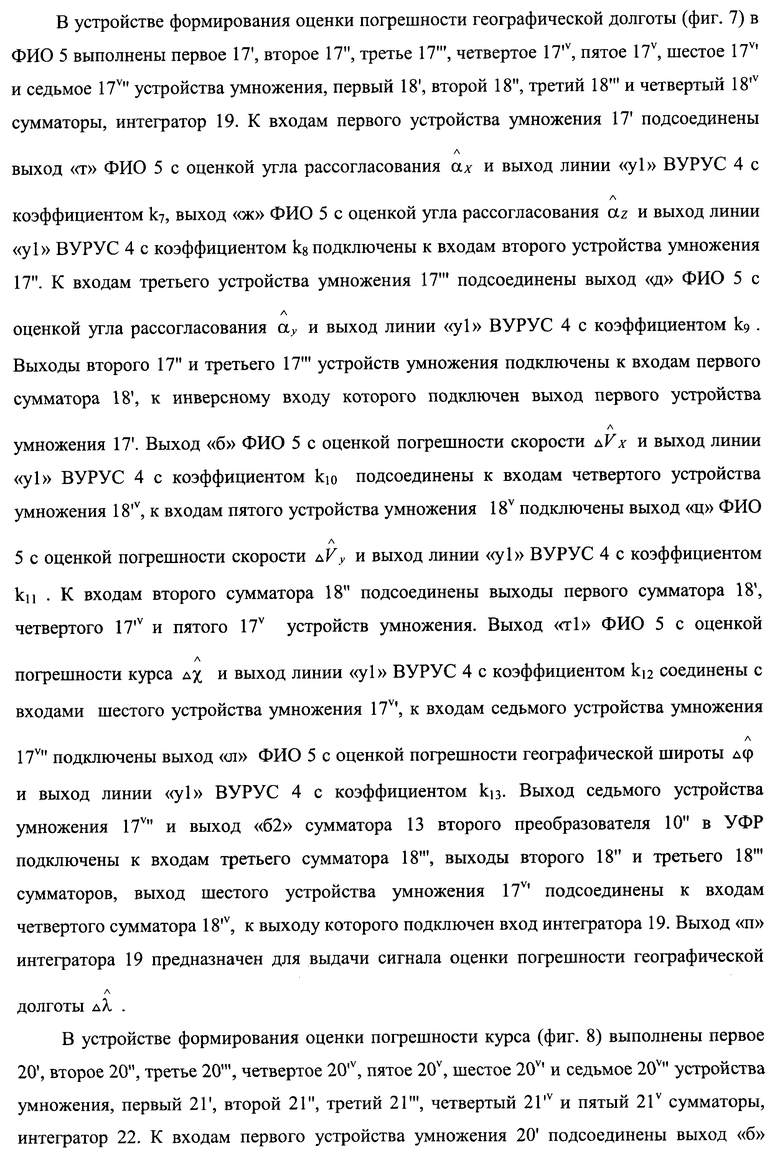
и выход линии ВУРУС с коэффициентом k7, выход ФИО с оценкой угла рассогласования и выход линии ВУРУС с коэффициентом k8 подключены к входам второго устройства умножения, к входам третьего устройства умножения подсоединены выход ФИО с оценкой угла рассогласования  и выход линии ВУРУС с коэффициентом k9, выходы второго и третьего устройств умножения подключены к входам первого сумматора, к инверсному входу которого подключен выход первого устройства умножения, выход ФИО с оценкой погрешности скорости и выход линии ВУРУС с коэффициентом k10 подсоединены к входам четвертого устройства умножения, к входам пятого устройства умножения подключены выход ФИО с оценкой погрешности скорости и выход линии ВУРУС с коэффициентом k11, к входам второго сумматора подсоединены выходы первого сумматора, четвертого и пятого устройств умножения, выход ФИО с оценкой погрешности курса и выход линии ВУРУС с коэффициентом k12 соединены с входами шестого устройства умножения, к входам седьмого устройства умножения подключены выход ФИО с оценкой погрешности географической широты
и выход линии ВУРУС с коэффициентом k9, выходы второго и третьего устройств умножения подключены к входам первого сумматора, к инверсному входу которого подключен выход первого устройства умножения, выход ФИО с оценкой погрешности скорости и выход линии ВУРУС с коэффициентом k10 подсоединены к входам четвертого устройства умножения, к входам пятого устройства умножения подключены выход ФИО с оценкой погрешности скорости и выход линии ВУРУС с коэффициентом k11, к входам второго сумматора подсоединены выходы первого сумматора, четвертого и пятого устройств умножения, выход ФИО с оценкой погрешности курса и выход линии ВУРУС с коэффициентом k12 соединены с входами шестого устройства умножения, к входам седьмого устройства умножения подключены выход ФИО с оценкой погрешности географической широты  и выход линии ВУРУС с коэффициентом k13, выход седьмого устройства умножения и выход сумматора второго преобразователя входных воздействий ФИО в УФР подключены к входам третьего сумматора, выходы второго и третьего сумматоров, выход шестого устройства умножения подсоединены к входам четвертого сумматора, к выходу которого подключен вход интегратора, выход интегратора предназначен для выдачи сигнала оценки погрешности географической долготы
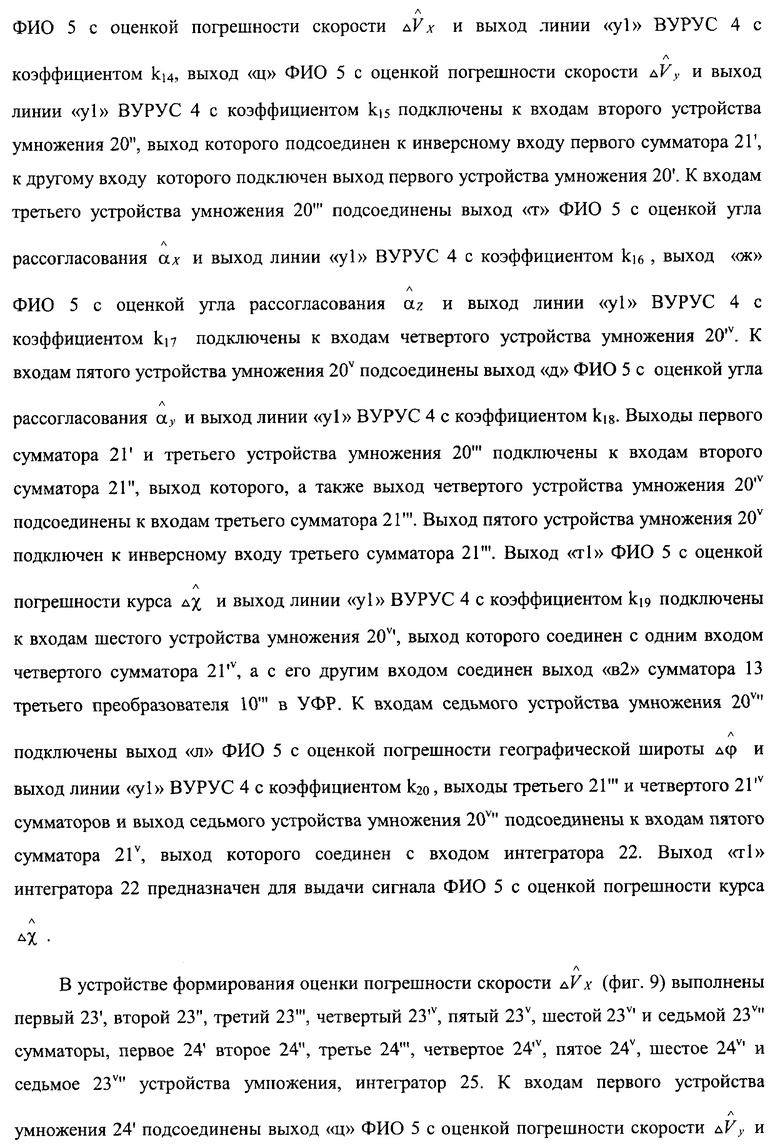
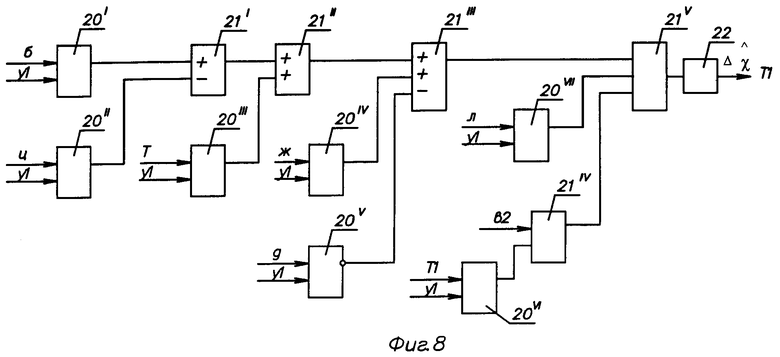
и выход линии ВУРУС с коэффициентом k13, выход седьмого устройства умножения и выход сумматора второго преобразователя входных воздействий ФИО в УФР подключены к входам третьего сумматора, выходы второго и третьего сумматоров, выход шестого устройства умножения подсоединены к входам четвертого сумматора, к выходу которого подключен вход интегратора, выход интегратора предназначен для выдачи сигнала оценки погрешности географической долготы  ; в устройстве формирования оценки погрешности курса выполнены первое, второе, третье, четвертое, пятое, шестое и седьмое устройства умножения, первый, второй, третий, четвертый и пятый сумматоры, интегратор, к входам первого устройства умножения подсоединены выход ФИО с оценкой погрешности скорости и выход линии ВУРУС с коэффициентом k14, выход ФИО с оценкой погрешности скорости и выход линии ВУРУС с коэффициентом k15 подключены к входам второго устройства умножения, выход которого подсоединен к инверсному входу первого сумматора, к другому входу которого подключен выход первого устройства умножения, к входам третьего устройства умножения подсоединены выход ФИО с оценкой угла рассогласования и выход линии ВУРУС с коэффициентом k16, выход ФИО с оценкой угла рассогласования и выход линии ВУРУС с коэффициентом k17 подключены к входам четвертого устройства умножения, к входам пятого устройства умножения подсоединены выход ФИО с оценкой угла рассогласования
; в устройстве формирования оценки погрешности курса выполнены первое, второе, третье, четвертое, пятое, шестое и седьмое устройства умножения, первый, второй, третий, четвертый и пятый сумматоры, интегратор, к входам первого устройства умножения подсоединены выход ФИО с оценкой погрешности скорости и выход линии ВУРУС с коэффициентом k14, выход ФИО с оценкой погрешности скорости и выход линии ВУРУС с коэффициентом k15 подключены к входам второго устройства умножения, выход которого подсоединен к инверсному входу первого сумматора, к другому входу которого подключен выход первого устройства умножения, к входам третьего устройства умножения подсоединены выход ФИО с оценкой угла рассогласования и выход линии ВУРУС с коэффициентом k16, выход ФИО с оценкой угла рассогласования и выход линии ВУРУС с коэффициентом k17 подключены к входам четвертого устройства умножения, к входам пятого устройства умножения подсоединены выход ФИО с оценкой угла рассогласования  и выход линии ВУРУС с коэффициентом k18, выходы первого сумматора и третьего устройства умножения подключены к входам второго сумматора, выход которого, а также выход четвертого устройства умножения подсоединены к входам третьего сумматора, выход пятого устройства умножения подключен к инверсному входу третьего сумматора, выход ФИО с оценкой погрешности курса и выход линии ВУРУС с коэффициентом k19 подключены к входам шестого устройства умножения, выход которого соединен с одним входом четвертого сумматора, а с его другим входом соединен выход сумматора третьего преобразователя входных воздействий ФИО в УФР, к входам седьмого устройства умножения подключены выход ФИО с оценкой погрешности географической широты и выход линии ВУРУС с коэффициентом k20, выходы третьего и четвертого сумматора и выход седьмого устройства умножения подсоединены к входам пятого сумматора, выход которого соединен с входом интегратора, выход интегратора предназначен для выдачи сигнала ФИО с оценкой погрешности курса ; в устройстве формирования оценки погрешности скорости выполнены первый, второй, третий, четвертый, пятый, шестой и седьмой сумматоры, первое, второе, третье, четвертое, пятое, шестое и седьмое устройства умножения, интегратор, к входам первого устройства умножения подсоединены выход ФИО с оценкой погрешности скорости и выход линии ВУРУС с коэффициентом k21, выход ФИО с оценкой дрейфа
и выход линии ВУРУС с коэффициентом k18, выходы первого сумматора и третьего устройства умножения подключены к входам второго сумматора, выход которого, а также выход четвертого устройства умножения подсоединены к входам третьего сумматора, выход пятого устройства умножения подключен к инверсному входу третьего сумматора, выход ФИО с оценкой погрешности курса и выход линии ВУРУС с коэффициентом k19 подключены к входам шестого устройства умножения, выход которого соединен с одним входом четвертого сумматора, а с его другим входом соединен выход сумматора третьего преобразователя входных воздействий ФИО в УФР, к входам седьмого устройства умножения подключены выход ФИО с оценкой погрешности географической широты и выход линии ВУРУС с коэффициентом k20, выходы третьего и четвертого сумматора и выход седьмого устройства умножения подсоединены к входам пятого сумматора, выход которого соединен с входом интегратора, выход интегратора предназначен для выдачи сигнала ФИО с оценкой погрешности курса ; в устройстве формирования оценки погрешности скорости выполнены первый, второй, третий, четвертый, пятый, шестой и седьмой сумматоры, первое, второе, третье, четвертое, пятое, шестое и седьмое устройства умножения, интегратор, к входам первого устройства умножения подсоединены выход ФИО с оценкой погрешности скорости и выход линии ВУРУС с коэффициентом k21, выход ФИО с оценкой дрейфа  по оси Z ГП, выход линии ВУРУС с коэффициентом k22 подключены к входам второго устройства умножения, выход которого подключен к инверсному входу первого сумматора, а к его другому входу подсоединен выход первого устройства умножения, выход ФИО с оценкой угла рассогласования и выход линии ВУРУС с коэффициентом k23 подсоединены к входам третьего устройства умножения, выход которого подключен к инверсному входу второго сумматора, а к его второму входу подсоединен выход первого сумматора, выход ФИО с оценкой дрейфа
по оси Z ГП, выход линии ВУРУС с коэффициентом k22 подключены к входам второго устройства умножения, выход которого подключен к инверсному входу первого сумматора, а к его другому входу подсоединен выход первого устройства умножения, выход ФИО с оценкой угла рассогласования и выход линии ВУРУС с коэффициентом k23 подсоединены к входам третьего устройства умножения, выход которого подключен к инверсному входу второго сумматора, а к его второму входу подсоединен выход первого сумматора, выход ФИО с оценкой дрейфа  по оси У ГП и выход линии ВУРУС с коэффициентом k24 соединены с входами четвертого устройства умножения, выход которого подключен к одному входу третьего сумматора, а к его другому входу подсоединен выход второго сумматора, к входам четвертого сумматора подключены выход ФИО с оценкой погрешности курса и выход ФИО с оценкой угла рассогласования , выход четвертого сумматора и выход линии ВУРУС с коэффициентом k25 подсоединены к входам пятого устройства умножения, выход которого и выход третьего сумматора подключены к входам пятого сумматора, выход ФИО с оценкой погрешности географической широты и выход линии ВУРУС с коэффициентом k26 подсоединены к входам шестого устройства умножения, выход которого и выход сумматора четвертого преобразователя входных воздействий ФИО в УФР подключены к входам шестого сумматора, к входам седьмого устройства умножения подключены выход ФИО с оценкой угла рассогласования
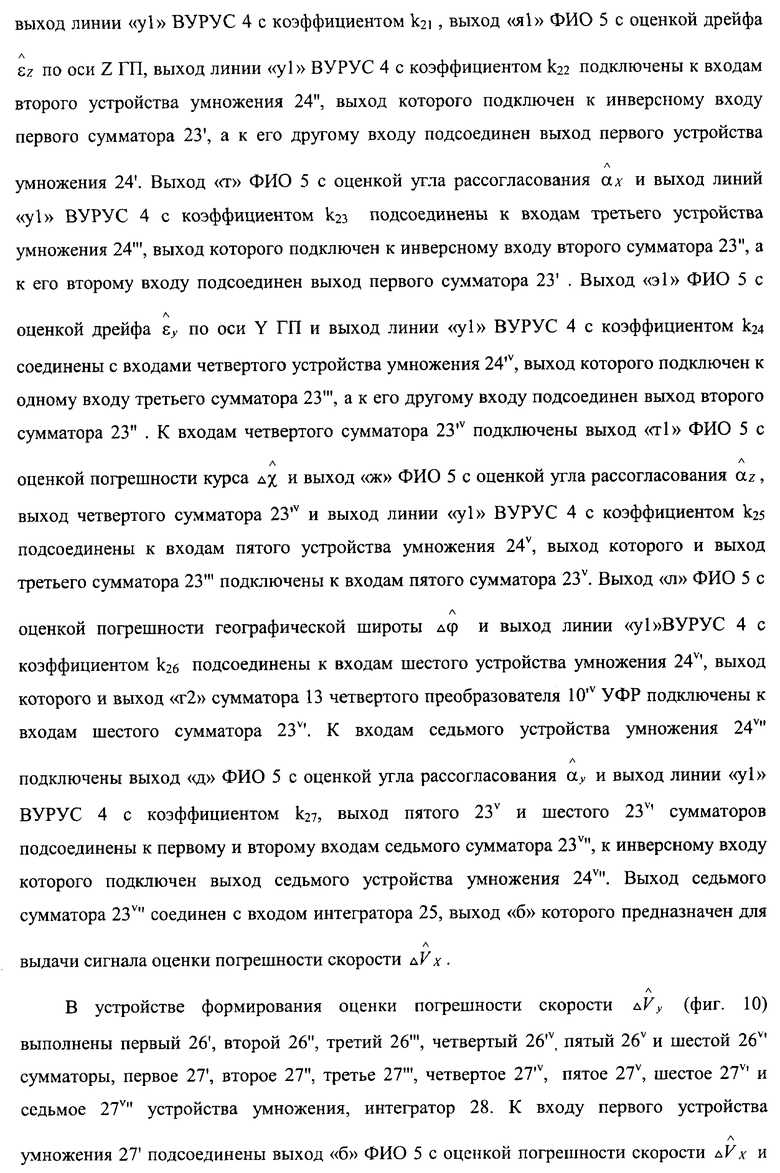
по оси У ГП и выход линии ВУРУС с коэффициентом k24 соединены с входами четвертого устройства умножения, выход которого подключен к одному входу третьего сумматора, а к его другому входу подсоединен выход второго сумматора, к входам четвертого сумматора подключены выход ФИО с оценкой погрешности курса и выход ФИО с оценкой угла рассогласования , выход четвертого сумматора и выход линии ВУРУС с коэффициентом k25 подсоединены к входам пятого устройства умножения, выход которого и выход третьего сумматора подключены к входам пятого сумматора, выход ФИО с оценкой погрешности географической широты и выход линии ВУРУС с коэффициентом k26 подсоединены к входам шестого устройства умножения, выход которого и выход сумматора четвертого преобразователя входных воздействий ФИО в УФР подключены к входам шестого сумматора, к входам седьмого устройства умножения подключены выход ФИО с оценкой угла рассогласования  и выход линии ВУРУС с коэффициентом k27, выходы пятого и шестого сумматоров подсоединены к первому и второму входам седьмого сумматора, к инверсному входу которого подключен выход седьмого устройства умножения, выход седьмого сумматора соединен с входом интегратора, выход которого предназначен для выдачи сигнала оценки погрешности скорости ; в устройстве формирования оценки ФИО погрешности скорости
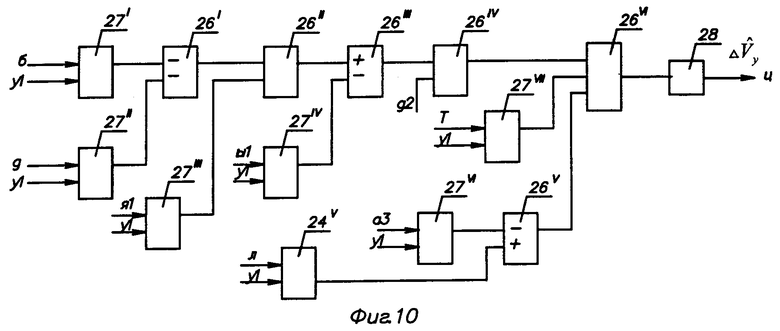
и выход линии ВУРУС с коэффициентом k27, выходы пятого и шестого сумматоров подсоединены к первому и второму входам седьмого сумматора, к инверсному входу которого подключен выход седьмого устройства умножения, выход седьмого сумматора соединен с входом интегратора, выход которого предназначен для выдачи сигнала оценки погрешности скорости ; в устройстве формирования оценки ФИО погрешности скорости  выполнены первый, второй, третий, четвертый, пятый и шестой сумматоры, первое, второе, третье, четвертое, пятое, шестое и седьмое устройства умножения, интегратор, к входам первого устройства умножения подсоединены выход ФИО с оценкой погрешности скорости
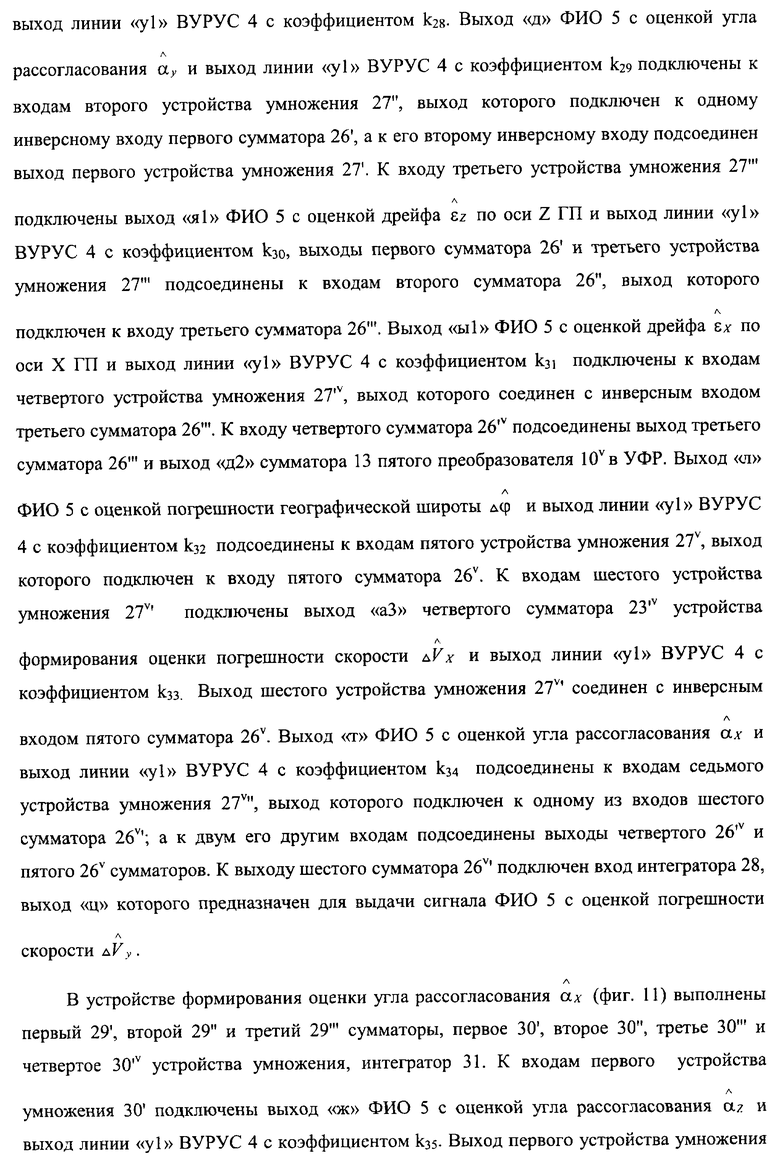
выполнены первый, второй, третий, четвертый, пятый и шестой сумматоры, первое, второе, третье, четвертое, пятое, шестое и седьмое устройства умножения, интегратор, к входам первого устройства умножения подсоединены выход ФИО с оценкой погрешности скорости  и выход линии ВУРУС с коэффициентом k28, выход ФИО с оценкой угла рассогласования и выход линии ВУРУС с коэффициентом k29 подключены к входам второго устройства умножения, выход которого подключен к одному инверсному входу первого сумматора, а к его второму инверсному входу подсоединен выход первого устройства умножения, к входу третьего устройства умножения подключены выход ФИО с оценкой дрейфа по оси Z ГП и выход линии ВУРУС с коэффициентом k30, выходы первого сумматора и третьего устройства умножения подсоединены к входам второго сумматора, выход которого подключен к входу третьего сумматора, выход ФИО с оценкой дрейфа
и выход линии ВУРУС с коэффициентом k28, выход ФИО с оценкой угла рассогласования и выход линии ВУРУС с коэффициентом k29 подключены к входам второго устройства умножения, выход которого подключен к одному инверсному входу первого сумматора, а к его второму инверсному входу подсоединен выход первого устройства умножения, к входу третьего устройства умножения подключены выход ФИО с оценкой дрейфа по оси Z ГП и выход линии ВУРУС с коэффициентом k30, выходы первого сумматора и третьего устройства умножения подсоединены к входам второго сумматора, выход которого подключен к входу третьего сумматора, выход ФИО с оценкой дрейфа  по оси Х ГП и выход линии ВУРУС с коэффициентом k31 подключены к входам четвертого устройства умножения, выход которого соединен с инверсным входом третьего сумматора, к входу четвертого сумматора подсоединены выход третьего сумматора и выход сумматора пятого преобразователя входных воздействий ФИО в УФР, выход ФИО с оценкой погрешности географической широты
по оси Х ГП и выход линии ВУРУС с коэффициентом k31 подключены к входам четвертого устройства умножения, выход которого соединен с инверсным входом третьего сумматора, к входу четвертого сумматора подсоединены выход третьего сумматора и выход сумматора пятого преобразователя входных воздействий ФИО в УФР, выход ФИО с оценкой погрешности географической широты  и выход линии ВУРУС с коэффициентом k32 подсоединены к входам пятого устройства умножения, выход которого подключен к входу пятого сумматора, к входам шестого устройства умножения подключены выход четвертого сумматора устройства формирования оценки погрешности скорости и выход линии ВУРУС с коэффициентом k33, выход шестого устройства умножения соединен с инверсным входом пятого сумматора, выход ФИО с оценкой угла рассогласования
и выход линии ВУРУС с коэффициентом k32 подсоединены к входам пятого устройства умножения, выход которого подключен к входу пятого сумматора, к входам шестого устройства умножения подключены выход четвертого сумматора устройства формирования оценки погрешности скорости и выход линии ВУРУС с коэффициентом k33, выход шестого устройства умножения соединен с инверсным входом пятого сумматора, выход ФИО с оценкой угла рассогласования  , выход линии ВУРУС с коэффициентом k34 подсоединены к входам седьмого устройства умножения, выход которого подключен к одному из входов шестого сумматора, а к двум его другим входам подсоединены выходы четвертого и пятого сумматоров, к выходу шестого сумматора подключен вход интегратора, выход которого предназначен для выдачи сигнала ФИО с оценкой погрешности скорости
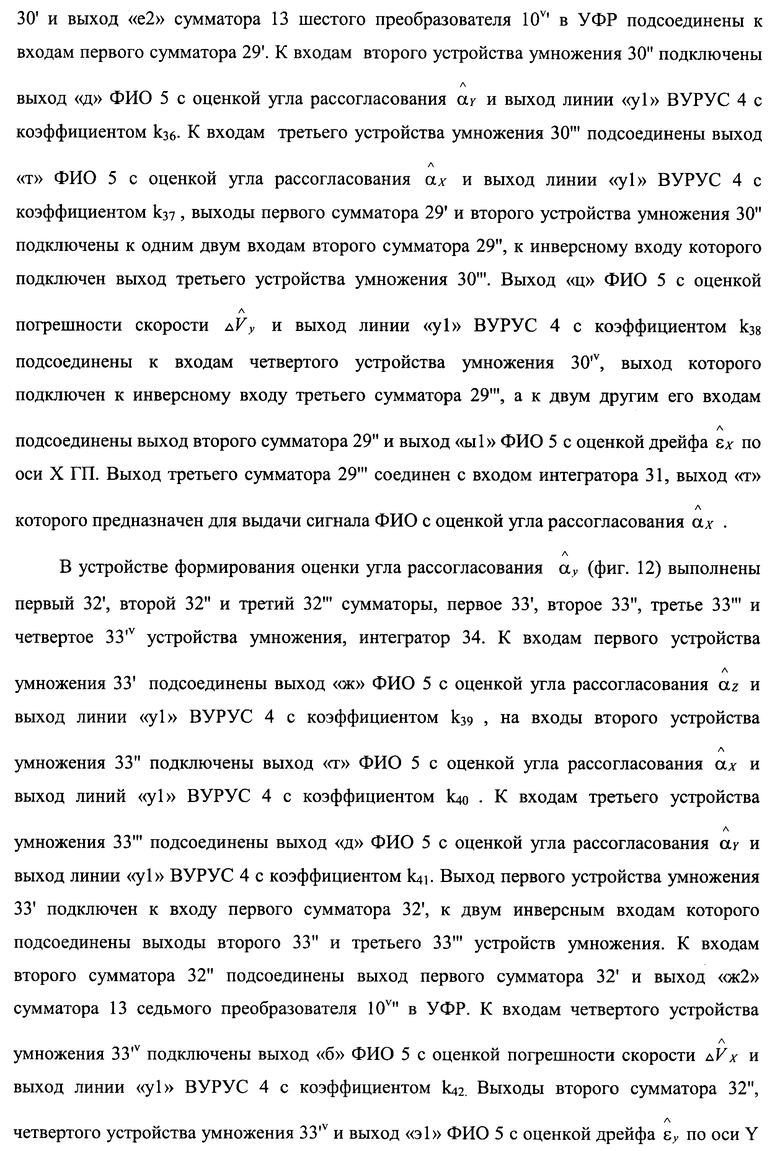
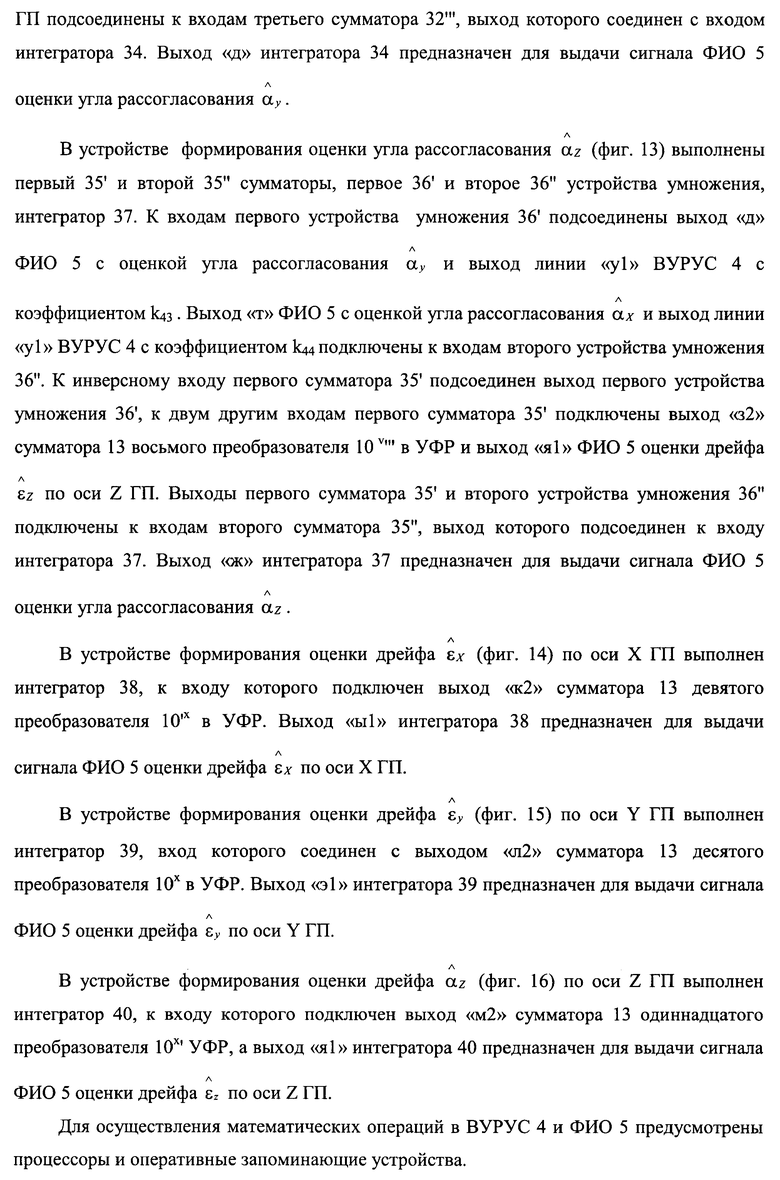
, выход линии ВУРУС с коэффициентом k34 подсоединены к входам седьмого устройства умножения, выход которого подключен к одному из входов шестого сумматора, а к двум его другим входам подсоединены выходы четвертого и пятого сумматоров, к выходу шестого сумматора подключен вход интегратора, выход которого предназначен для выдачи сигнала ФИО с оценкой погрешности скорости  ; в устройстве формирования оценки угла рассогласования
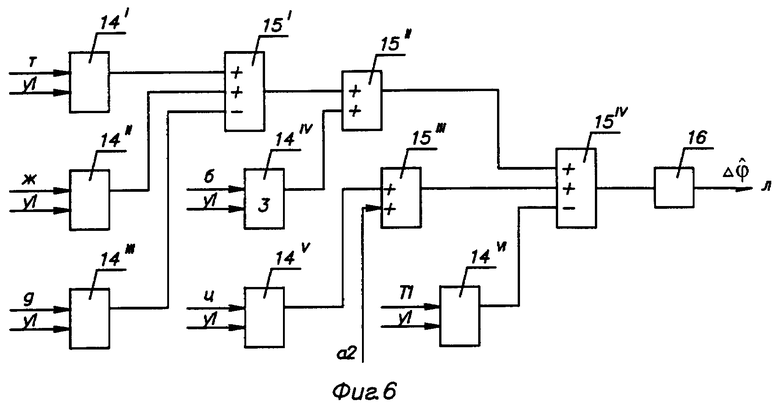
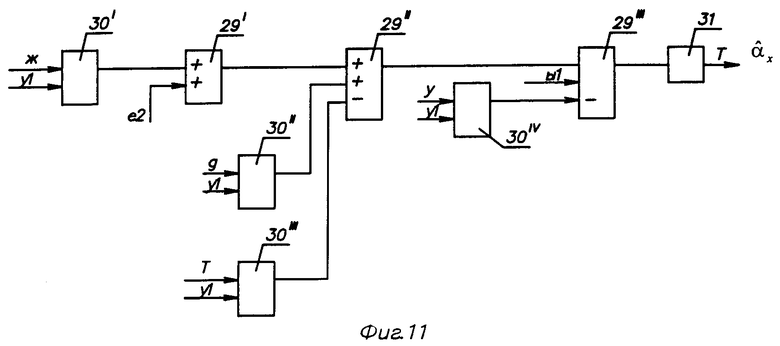
; в устройстве формирования оценки угла рассогласования  выполнены первый, второй и третий сумматоры, первое, второе, третье и четвертое устройства умножения, интегратор, к входам первого устройства умножения подключены выход ФИО с оценкой угла рассогласования
выполнены первый, второй и третий сумматоры, первое, второе, третье и четвертое устройства умножения, интегратор, к входам первого устройства умножения подключены выход ФИО с оценкой угла рассогласования  и выход линии ВУРУС с коэффициентом k35, выход первого устройства умножения и выход сумматора шестого преобразователя входных воздействий ФИО в УФР подсоединены к входам первого сумматора, к входам второго устройства умножения подключены выход ФИО с оценкой угла рассогласования
и выход линии ВУРУС с коэффициентом k35, выход первого устройства умножения и выход сумматора шестого преобразователя входных воздействий ФИО в УФР подсоединены к входам первого сумматора, к входам второго устройства умножения подключены выход ФИО с оценкой угла рассогласования  и выход линии ВУРУС с коэффициентом k36, к входам третьего устройства умножения подсоединены выход ФИО с оценкой угла рассогласования , и выход линии ВУРУС с коэффициентом k37, выходы первого сумматора и второго устройства умножения подключены к одним двум входам второго сумматора, к инверсному входу которого подключен выход третьего устройства умножения, выход ФИО с оценкой погрешности скорости и выход линии ВУРУС с коэффициентом k38 подсоединены к входам четвертого устройства умножения, выход которого подключен к инверсному входу третьего сумматора, а к двум другим его входам подсоединены выход второго сумматора и выход ФИО с оценкой дрейфа
и выход линии ВУРУС с коэффициентом k36, к входам третьего устройства умножения подсоединены выход ФИО с оценкой угла рассогласования , и выход линии ВУРУС с коэффициентом k37, выходы первого сумматора и второго устройства умножения подключены к одним двум входам второго сумматора, к инверсному входу которого подключен выход третьего устройства умножения, выход ФИО с оценкой погрешности скорости и выход линии ВУРУС с коэффициентом k38 подсоединены к входам четвертого устройства умножения, выход которого подключен к инверсному входу третьего сумматора, а к двум другим его входам подсоединены выход второго сумматора и выход ФИО с оценкой дрейфа  по оси Х ГП, выход третьего сумматора соединен с входом интегратора, выход которого предназначен для выдачи сигнала ФИО с оценкой угла рассогласования ; в устройстве формирования оценки угла рассогласования
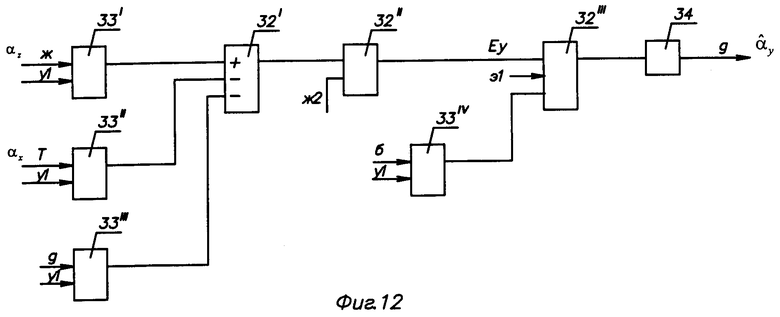
по оси Х ГП, выход третьего сумматора соединен с входом интегратора, выход которого предназначен для выдачи сигнала ФИО с оценкой угла рассогласования ; в устройстве формирования оценки угла рассогласования  выполнены первый, второй и третий сумматоры, первое, второе, третье и четвертое устройства умножения, интегратор, к входам первого устройства умножения подсоединены выход ФИО с оценкой угла рассогласования
выполнены первый, второй и третий сумматоры, первое, второе, третье и четвертое устройства умножения, интегратор, к входам первого устройства умножения подсоединены выход ФИО с оценкой угла рассогласования  и выход линии ВУРУС с коэффициентом k39, на входы второго устройства умножения подключены выход ФИО с оценкой угла рассогласования и выход линии ВУРУС с коэффициентом k40, к входам третьего устройства умножения подсоединены выход ФИО с оценкой угла рассогласования и выход линии ВУРУС с коэффициентом k41, выход первого устройства умножения подключен к входу первого сумматора, к двум инверсным входам которого подсоединены выходы второго и третьего устройств умножения, к входам второго сумматора подсоединены выход первого сумматора и выход сумматора седьмого преобразователя входных воздействий ФИО в УФР, к входам четвертого устройства умножения подключены выход ФИО с оценкой погрешности скорости
и выход линии ВУРУС с коэффициентом k39, на входы второго устройства умножения подключены выход ФИО с оценкой угла рассогласования и выход линии ВУРУС с коэффициентом k40, к входам третьего устройства умножения подсоединены выход ФИО с оценкой угла рассогласования и выход линии ВУРУС с коэффициентом k41, выход первого устройства умножения подключен к входу первого сумматора, к двум инверсным входам которого подсоединены выходы второго и третьего устройств умножения, к входам второго сумматора подсоединены выход первого сумматора и выход сумматора седьмого преобразователя входных воздействий ФИО в УФР, к входам четвертого устройства умножения подключены выход ФИО с оценкой погрешности скорости  и выход линии ВУРУС с коэффициентом k42, выходы второго сумматора, четвертого устройства умножения и ФИО с оценкой дрейфа
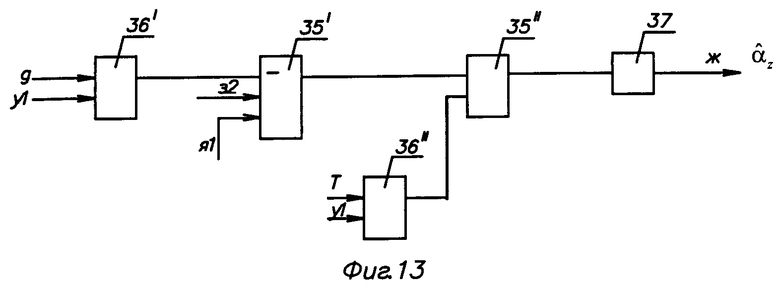
и выход линии ВУРУС с коэффициентом k42, выходы второго сумматора, четвертого устройства умножения и ФИО с оценкой дрейфа  по оси Y ГП подсоединены к входам третьего сумматора, выход которого соединен с входом интегратора, выход интегратора предназначен для выдачи сигнала ФИО оценки угла рассогласования ; в устройстве формирования оценки угла рассогласования
по оси Y ГП подсоединены к входам третьего сумматора, выход которого соединен с входом интегратора, выход интегратора предназначен для выдачи сигнала ФИО оценки угла рассогласования ; в устройстве формирования оценки угла рассогласования  выполнены первый и второй сумматоры, первое и второе устройства умножения, интегратор, к входам первого устройства умножения подсоединены выход ФИО с оценкой угла рассогласования
выполнены первый и второй сумматоры, первое и второе устройства умножения, интегратор, к входам первого устройства умножения подсоединены выход ФИО с оценкой угла рассогласования  и выход линии ВУРУС с коэффициентом k43, выход ФИО с оценкой угла рассогласования и выход линии ВУРУС с коэффициентом k44 подключены к входам второго устройства умножения, к инверсному входу первого сумматора подсоединен выход первого устройства умножения, к двум другим входам первого сумматора подключены выход сумматора восьмого преобразователя входных воздействий ФИО в УФР и выход ФИО оценки дрейфа
и выход линии ВУРУС с коэффициентом k43, выход ФИО с оценкой угла рассогласования и выход линии ВУРУС с коэффициентом k44 подключены к входам второго устройства умножения, к инверсному входу первого сумматора подсоединен выход первого устройства умножения, к двум другим входам первого сумматора подключены выход сумматора восьмого преобразователя входных воздействий ФИО в УФР и выход ФИО оценки дрейфа  по оси Z ГП, выходы первого сумматора и второго устройства умножения подключены к входам второго сумматора, выход которого подсоединен к входу интегратора, выход интегратора предназначен для выдачи сигнала ФИО оценки угла рассогласования
по оси Z ГП, выходы первого сумматора и второго устройства умножения подключены к входам второго сумматора, выход которого подсоединен к входу интегратора, выход интегратора предназначен для выдачи сигнала ФИО оценки угла рассогласования  ; в устройстве формирования оценки дрейфа
; в устройстве формирования оценки дрейфа  по оси Х ГП выполнен интегратор, к входу которого подключен выход сумматора девятого преобразователя входных воздействий ФИО в УФР, выход интегратора предназначен для выдачи сигнала ФИО оценки дрейфа по оси Х ГП; в устройстве формирования оценки дрейфа
по оси Х ГП выполнен интегратор, к входу которого подключен выход сумматора девятого преобразователя входных воздействий ФИО в УФР, выход интегратора предназначен для выдачи сигнала ФИО оценки дрейфа по оси Х ГП; в устройстве формирования оценки дрейфа  по оси Y ГП выполнен интегратор, вход которого соединен с выходом сумматора десятого преобразователя входных воздействий ФИО в УФР, выход интегратора предназначен для выдачи сигнала ФИО оценки дрейфа по оси Y ГП; в устройстве формирования оценки дрейфа по оси Z ГП выполнен интегратор, к входу которого подключен выход сумматора одиннадцатого преобразователя входных воздействий ФИО в УФР, а выход интегратора предназначен для выдачи сигнала ФИО оценки дрейфа по оси Z ГП.
по оси Y ГП выполнен интегратор, вход которого соединен с выходом сумматора десятого преобразователя входных воздействий ФИО в УФР, выход интегратора предназначен для выдачи сигнала ФИО оценки дрейфа по оси Y ГП; в устройстве формирования оценки дрейфа по оси Z ГП выполнен интегратор, к входу которого подключен выход сумматора одиннадцатого преобразователя входных воздействий ФИО в УФР, а выход интегратора предназначен для выдачи сигнала ФИО оценки дрейфа по оси Z ГП.
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170410C1 |
| ИНЕРЦИАЛЬНО-СПУТНИКОВАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2003 |
|
RU2233431C1 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434202C1 |
| Этажная литьевая форма | 1990 |
|
SU1742084A1 |
| US 0007193559 B2, 20.03.2007. | |||

