Изобретение относится к комплексам навигации, управления и наведения летательных аппаратов (ЛА).
В наиболее близком аналоге, приведенном в книге [1] на стр.262-288, представлена комплексная информационная система (КИС) ЛА, включающая в себя датчик воздушной скорости (ДВС), датчик углов атаки и скольжения (ДУАС), датчик угловой ориентации (курсовертикаль), а также вычислительное устройство, обеспечивающее информационный обмен между датчиками и расчет необходимых параметров. Вычислительное устройство содержит вычислительно-логические блоки, выполняющие следующие операции: компенсацию погрешностей датчиков, расчет вектора воздушной скорости в связанной системе координат, пересчет вектора воздушной скорости в горизонтальную систему координат, компенсацию ветра, расчет координат ЛА. Работа наиболее близкого аналога состоит в следующем. Измеренная величина воздушной скорости пересчитывается с помощью измеренных аэродинамических углов атаки и скольжения в связанную с ЛА систему координат, после чего, используя информацию об угловой ориентации ЛА относительно горизонта и меридиана, поступающую от курсовертикали, вектор воздушной скорости перепроецируется из связанной системы координат в горизонтальную. Составляющие этого вектора скорости корректируются на величины соответствующих составляющих скорости ветра, которые определяются априорными метеорологическими методами с помощью карт барической топографии, а также в виде средних значений за время полета (см. [1], стр.276-278). Скорректированный на величину ветра вектор воздушной скорости ЛА используется для счисления координат ЛА.
Недостатками наиболее близкого аналога являются, во-первых, неточный учет скорости ветра, основанный на априорной или осредненной информации о его параметрах; во-вторых, наличие погрешностей датчиков (ДВС, ДУАС, курсовертикали); в-третьих, фактическая неработоспособность (недостоверность выдаваемой информации) аэрометрических датчиков в некоторых режимах полета ЛА, например в режиме сверхманевренности, когда угол атаки α достигает значений 60...90° и далее 90...180°.
Задачей изобретения является повышение точности КИС и расширение ее функциональных возможностей при работе в особых режимах, как, например, режим сверхманевренности.
Достигается указанный результат тем, что комплексная информационная система, содержащая взаимосоединенные входами/выходами по магистрали информационного обмена датчик воздушной скорости, датчик углов атаки и скольжения, датчик углов ориентации, вычислительную систему, включающую взаимосоединенные по магистрали вычислительного информационного обмена блок расчета вектора скорости, блок перепроецирования вектора скорости, блок компенсации скорости ветра, блок расчета координат, блок ввода-вывода и управления информационным обменом, другой вход/выход которого является входом-выходом вычислительной системы, дополнительно снабжена датчиком параметров движения, вход/выход которого подключен к магистрали информационного обмена, а также введенными в состав вычислительной системы блоком формирования невязок, блоком оценивания скорости ветра, блоком прогноза скорости ветра, блоком обратного расчета вектора скорости, блоком обратного перепроецирования вектора скорости, блоком расчета углов атаки и скольжения.
На чертеже представлена блок-схема комплексной информационной системы, в состав которой входят:
1 - датчик воздушной скорости ДВС;
2 - датчик углов атаки и скольжения ДУАС;
3 - датчик углов ориентации ДУО;
4 - датчик параметров движения ДПД;
5 - вычислительная система ВС;
6 - магистраль информационного обмена МИО;
7 - магистраль вычислительного информационного обмена МВИО.
При этом в состав блока ВС 5 входят вычислительно-логические блоки:
8 - блок ввода-вывода информации и управления информационным обменом ВВУИО;
9 - блок расчета вектора скорости РВС;
10 - блок перепроецирования вектора скорости ПВС;
11 - блок компенсации скорости ветра КСВ;
12 - блок расчета координат РК;
13 - блок формирования невязок ФН;
14 - блок оценивания скорости ветра ОСВ;
15 - блок прогноза скорости ветра ПСВ;
16 - блок обратного расчета вектора скорости ОРВС;
17 - блок обратного перепроецирования вектора скорости ОПВС;
18 - блок расчета углов атаки и скольжения РУАС.
На чертеже показана также
19 - внешняя информационная система ВУС, которая не входит в состав КИС.
Информационная взаимосвязь блоков КИС осуществляется по МИО 6 (на чертеже обозначена тонкой сплошной линией).
Информационный обмен между входами/выходами вычислительно-логических модулей ВС 5 осуществляется по МВИО 7 (на чертеже обозначена тонкой сплошной линией).
Блоки 1-4 подключены своими входами/выходами к магистрали информационного обмена МИО 6, к которой подключен также вход/выход ВС 5, при этом входом/выходом ВС 5 является вход/выход блока ВВУИО 8, а другой вход/выход блока ВВУИО 8 подключен к внутренней магистрали вычислительного информационного обмена МВИО 7, к которой подключены также входы/выходы блоков 9÷18.
Блоки 1÷3 представляют собой известные датчики и бортового оборудования, описанные, например, в книге [1] на стр.274, 266-270, 107-245.
В состав блока ДУАС 2 входят, например, две свободно ориентирующиеся в потоке парные плоские пластинки, оси вращения которых закреплены на наружной поверхности ЛА. Угол поворота одной пары пластин соответствует углу скольжения β, а другой пары - углу атаки α ЛА. Эти углы воспринимаются датчиками углов и передаются потребителям.
В состав блока ДВС 1 входят приемники статического pн и полного pn давлений потока воздуха, набегающего на ЛА, и температуры Т заторможенного потока, а также соответствующие устройства преобразования и обработки информации. Измерение величин давлений и температуры позволяет вычислять на основе известных аэродинамических закономерностей и физики атмосферы величину VB воздушной скорости ЛА (см. [1], стр.268):

где: ϕ(М) - известная функция числа Маха М;
М - число Маха, зависящее известным образом от статического и полного давлений потока.
В состав блока ДУО 3 входят, например, гироскопические датчики угловой ориентации, использующие свойство гироскопов сохранять заданное направление в пространстве, или астрономические датчики, использующие принцип пеленгации небесных тел и последующий расчет ориентации ЛА, или датчики угловой ориентации, основанные на использовании свободных тел (см., например, [1], стр.110-135), а также соответствующие устройства преобразования и обработки информации. В общем случае на выходе ДУО 3 имеются значения углов курса ψ, тангажа ϑ, крена γ ЛА.
Дополнительно введенный блок ДПД 4 представляет собой известное устройство измерения путевой скорости и координат ЛА, описанное в литературе, например [2], стр.8-16, 171-243, 316-317, 325-327, 374-385; [1], стр.366-372, 311-323, 516-540. Блок ДПД 4 выполнен, например, в виде инерциальной системы навигации, решающей задачу автономного счисления скорости и координат ЛА на основе измеряемых с помощью акселерометров и гироскопов, входящих в нее, ускорений и угловых скоростей (или углов ориентации) ЛА; радиотехнической системы ближней навигации, измеряющей азимут радиомаяка и дальность до него, с помощью которых при известных координатах радиомаяка решается задача определения координат ЛА; доплеровского измерителя скорости и сноса, измеряющего доплеровские сдвиги частот излучаемых радиосигналов, с помощью которых решается задача определения вектора скорости ЛА; спутниковой навигационной системы, измеряющей временную задержку, фазовый сдвиг и доплеровский сдвиг частоты радиосигналов от космических спутников, с помощью которых при известных параметрах движения спутников решается задача определения времени, координат и скорости ЛА; различных средств визирования ориентиров (целей), измеряющих дальности до ориентиров и/или углы их визирования, с помощью которых при известных координатах ориентиров решается задача определения координат ЛА; измерителей параметров геофизических поверхностных и пространственных полей: поля рельефа, магнитного поля, гравитационного поля, поля радиолокационного контраста и др., с помощью которых при известных закономерностях распределений этих полей в околоземном пространстве решается задача определения координат ЛА. На выходе блока ДПД 4 - составляющие путевой скорости ЛА и его координаты.
Магистрали МИО 6 и МВИО 7 представляют собой известные (описанные, например, в [3], стр.21-24, 394-406) линии связи и информационного обмена, например, по последовательному коду, по параллельному коду, мультиплексные и др.
Блок ВВУИО 8 представляет собой известное устройство (описанное, например, в [3], стр.16-24, 386-406, 436-440) сопряжения вычислителя с линиями связи, осуществляющее прием, контроль и выдачу информации.
Блоки РВС 9, ПВС 10, КСВ 11, РК 12, ФН 13, ОСВ 14, ПСВ 15, ОРВС 16, ОПВС 17, РУАС 18 выполнены, например, в виде однопроцессорных вычислителей ([3], стр.31).
Блок РВС 9 осуществляет расчет составляющих VB x, VB y, VB z вектора скорости ЛА в связанных с ним осях Ох (продольной), Oy (нормальной), Oz (боковой) с помощью формул вида ([1], стр.263):
где: α, β - измеренные с помощью ДУАС 2 углы атаки и скольжения ЛА;
VB - измеренная с помощью ДВС 1 величина воздушной скорости ЛА.
Блок ПВС 10 осуществляет перепроецирование составляющих VB x, VB y, VB z вектора скорости ЛА из связанных осей на оси горизонтальной системы координат Oξηξ с помощью формул вида ([1], стр.264):



где: Vξ, Vη, Vζ - проекции вектора скорости ЛА на оси горизонтальной системы координат;
ψ, ϑ, γ - углы курса, тангажа, крена ЛА, измеренные с помощью ДУО 3;
ось Оη направлена по вертикали вверх, ось Oξ, образует угол χ с направлением на север.
Блок КСВ 11 осуществляет добавление к составляющим Vξ, Vη, Vζ вектора скорости ЛА составляющих скорости ветра uξ, uη, uζ на эти же оси и формирование расчетных значений Wξ, Wη, Wζ путевой скорости ЛА:
Блок РК 12 осуществляет интегрирование расчетных значений Wξ, Wη, Wζ путевой скорости ЛА и определение координат Sξ, Sη, Sζ ЛА (см. [1], стр.280).
Дополнительно введенный блок ФН 13 обеспечивает формирование невязок между расчетными значениями скорости и координат, полученными в блоках ПВС 10 и РК 12, с одной стороны, и измеренными с помощью блока ДПД 4, с другой стороны.
Дополнительно введенный блок ОСВ 14 путем соответствующей обработки невязок обеспечивает оценивание скорости ветра и инструментальных погрешностей датчиков КИС.
Дополнительно введенный блок ПСВ 15 обеспечивает прогноз скорости ветра в режимах, когда работа блоков ДВС 1, ДУАС 2 и ОСВ 14 затруднена.
Дополнительно введенный блок ОРВС 16 обеспечивает обратный расчет вектора скорости ЛА относительно атмосферы путем соответствующего решения «треугольника скоростей» ([1], стр.266).
Дополнительно введенный блок ОПВС 17 обеспечивает обратное перепроецирование полученного в блоке ОРВС 16 вектора скорости ЛА из горизонтальной в связанную систему координат.
Дополнительно введенный блок РУАС 18 обеспечивает формирование расчетных значений углов атаки и скольжения в режимах, когда работа блоков ДВС 1, ДУАС 2 затруднена.
КИС работает следующим образом.
В нормальных режимах полета, когда блоки ДВС 1, ДУАС 2, ДПД 4 функционируют правильно, работа КИС происходит так. ДВС 1 измеряет величину VB воздушной скорости ЛА, ДУАС 2 измеряет углы атаки α и скольжения β. Эти величины через МИО 6, блок ВВУИО 8 поступают в МВИО 7. Из МВИО 7 они поступают в блок РВС 9, в котором с помощью формул (2) осуществляется расчет составляющих вектора скорости в связанной системе координат. Эти составляющие через МВИО 7 поступают в блок ПВС 10. ДУО 3 измеряет углы ψ, ϑ, γ ориентации ЛА, которые через МИО 6, блок ВВУИО 8 поступают в МВИО 7. Из МВИО 7 значения углов ориентации ЛА поступают в блок ПВС 10, в котором с помощью формул (3) осуществляется перепроецирование вектора скорости ЛА из связанной системы координат в горизонтальную. Полученные величины проекций скорости ЛА через МВИО 7 поступают в блок КСВ 11, в который из МВИО 7 поступают также величины составляющих скорости ветра uξ, uη, uζ и с помощью формул (4) осуществляется формирование расчетных значений Wξ, Wη, Wζ путевой скорости ЛА, которые затем через МВИО 7 поступают в блок РК 12, в котором производится их интегрирование и определение координат Sξ, Sη, Sζ ЛА.
ДПД 4 осуществляет определение составляющих WДПД ξ, WДПД η, WДПД ζ путевой скорости ЛА и координат SДПД ξ, SДПД η, SДПД ζ ЛА, которые через МИО 6, блок ВВУИО 8 поступают в МВИО 7. Из МВИО 7 они поступают в блок ФН 13, в который также поступают значения скоростей ЛА из блока ПВС 10, а также значения координат ЛА из блока РК 12. Вычитанием из расчетных значений координат и скоростей Sξ, Sη, Sζ и Vξ, Vη, Vζ измеренных значений: SДПД ξ, SДПД η, SДПД ζ и VДПД ξ, VДПД η, VДПД ζ - строится вектор Z невязок, который поступает в МВИО 7. Из МВИО 7 вектор Z невязок поступает в блок ОСВ 14, в котором осуществляется оценивание составляющих скорости ветра и погрешностей (ошибок) датчиков КИС, например, по алгоритму нестационарной вычислительно-устойчивой фильтрации (см. [2], стр.40-45) вида:
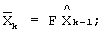
Здесь E - единичная матрица;
 - прогнозируемое значение оцениваемого вектора состояния в k-й момент времени;
- прогнозируемое значение оцениваемого вектора состояния в k-й момент времени;
 - оценка значения вектора состояния в k-й момент времени;
- оценка значения вектора состояния в k-й момент времени;
 - прогнозируемое значение ковариационной матрицы вектора состояния в k-й момент времени;
- прогнозируемое значение ковариационной матрицы вектора состояния в k-й момент времени;
Рk - оценка ковариационной матрицы вектора состояния в k-й момент времени;
Q, R - ковариационные матрицы входных и измерительных шумов соответственно;
F, Г, Н - матрицы моделей системы.
В состав оцениваемого вектора состояния входят, например, погрешности (ошибки) датчиков КИС, составляющие uξ, uη, uζ скорости ветра, составляющие Nξ, Nη, Nζ негравитационных ускорений воздушных масс, вызванных турбулентностью атмосферы. Полученные значения оценок поступают в МВИО 7, а оттуда - в другие блоки ВС 5 для соответствующей обработки, а также для соответствующего учета ошибок блоков ДВС 1, ДУАС 2, ДУО 3.
Введение в состав КИС блоков ДПД 4, ФН 13, ОСВ 14 позволяет с высокой точностью определять параметры скорости ветра и ошибок датчиков КИС, что существенно повышает точность определения координат и скорости ЛА.
В режимах полета, когда блоки ДВС 1 и ДУАС 2 функционируют правильно, а блок ДПД 4 - неправильно (или вообще не функционирует), например, если блок ДПД 4 выполнен в виде приемника спутниковой навигационной системы, то неправильная работа блока может быть обусловлена наличием помех, - система КИС работает следующим образом. ДВС 1 измеряет величину VB воздушной скорости ЛА, ДУАС 2 измеряет углы атаки α и скольжения β. Эти величины через МИО 6, блок ВВУИО 8 поступают в МВИО 7. Из МВИО 7 они поступают в блок РВС 9, в котором с помощью формул (2) осуществляется расчет составляющих вектора скорости в связанной системе координат. Эти составляющие через МВИО 7 поступают в блок ПВС 10. ДУО 3 измеряет углы ψ, ϑ, γ ориентации ЛА, которые через МИО 6, блок ВВУИО 8 поступают в МВИО 7. Из МВИО 7 значения углов ориентации ЛА поступают в блок ПВС 10, в котором с помощью формул (3) осуществляется перепроецирование вектора скорости ЛА из связанной системы координат в горизонтальную. Полученные величины проекций скорости ЛА через МВИО 7 поступают в блок КСВ 11, в который из МВИО 7 поступают также величины составляющих скорости ветра uξ, uη, uζ и с помощью формул (4) осуществляется формирование расчетных значений Wξ, Wη, Wζ путевой скорости ЛА, которые затем через МВИО 7 поступают в блок РК 12, в котором производится их интегрирование и определение координат Sξ, Sη, Sζ ЛА. Определение составляющих скорости ветра uξ, uη, uζ производится в блоке ПСВ 15 с помощью формул вида:

где: Ω - угловая скорость Земли;
g - ускорение силы тяжести;
ω - абсолютная угловая скорость горизонтального трехгранника;
 - негравитационное ускорение воздушных масс, в котором N - член, обусловленный турбулентностью;
- негравитационное ускорение воздушных масс, в котором N - член, обусловленный турбулентностью;
ρ - плотность атмосферы;
pH - статическое давление атмосферы.
Давление pH определяется, например, с помощью блока ДВС 1, а если блок ДВС 1 становится неработоспособен, то используется запомненное значение давления. Величина N формируется в блоке ОСВ 14 и на время, в течение которого нет информации от ДПД 4, запоминается в блоке ПСВ 15. Величины Ω, g и ω определяются с помощью известных формул (см., например,[4], стр.20-22, 44-46, 56) как функции координат ЛА, например, в принятой в книге [1] системе ориентации осей Oξηζ, эти формулы имеют вид:


Здесь Ω - величина угловой скорости Земли;
Rξ, Rζ, RC - радиусы кривизны поверхности высоты Н;
А - величина большой полуоси земного эллипсоида;
ϕ, Н - широта и высота места;
go - величина ускорения силы тяжести на экваторе;
δ - безразмерный коэффициент (δ=0.005317 - см., [4], стр.21).
Введение в состав КИС блока ПСВ 15 позволяет с высокой точностью определять параметры скорости ветра в условиях, когда нет корректирующей информации по скорости и координатам, что существенно повышает точность автономного определения координат и скорости ЛА.
В тех режимах полета, когда блоки ДВС 1 и ДУАС 2 функционируют неправильно (блоки находятся в состоянии отказа или их информация недостоверна), например, в режиме сверхманевренности ЛА, а блоки ДУО 3 и ДПД 4 действуют исправно, работа КИС происходит так. Измерение величин VB, α, β с помощью блоков ДВС 1 и ДУАС 2 невозможно. В блоке ПСВ 15 осуществляется определение составляющих скорости ветра uξ, uη, uζ с помощью формул вида (6). Эта информация поступает в МВИО 7. ДПД 4 осуществляет определение составляющих WДПД ξ, WДПД η, WДПД ζ путевой скорости ЛА, которые через МИО 6, блок ВВУИО 8 поступают в МВИО 7. Из МВИО 7 они поступают в блок ОРВС 16, в который также поступают значения составляющих скорости ветра uξ, uη, uζ. В блоке ОРВС 16 осуществляется обратный расчет составляющих Vξ, Vη, Vζ вектора скорости ЛА с помощью формул вида:
Полученные составляющие скорости через МВИО 7 поступают в блок ОПВС 17, в который из МВИО 7 поступают также определенные блоком ДУО 3 углы ψ, ϑ, γ ориентации ЛА. В блоке ОПВС 17 осуществляется обратное перепроецирование составляющих Vξ, Vη, Vζ вектора скорости ЛА из горизонтальной системы координат Oξηζ в связанную систему координат с помощью формул, обратных формулам (3):



Рассчитанные составляющие VB x, VB y, VB z через МВИО 7 поступают в блок РУАС 18, в котором осуществляется расчет углов атаки и скольжения с помощью формул, обратных формулам (2):

Также в блоке РУАС 18 осуществляется расчет величины воздушной скорости ЛА с помощью формулы вида:

Рассчитанные значения α, β, VB через МВИО 7, ВВУИО 8, МИО 6 поступают на входы потребителей этой информации.
Введение в состав КИС блоков ОРВС 16, ОПВС 17, РУАС 18 обеспечивает определение аэродинамических параметров (воздушной скорости ЛА, углов атаки и скольжения) в условиях, когда аэрометрические датчики работают неправильно или находятся в состоянии отказа, например в режиме сверхманевренности ЛА. При этом существенно расширяются функциональные возможности системы, принципиально улучшается качество ее работы в таких режимах и, как следствие, повышается эффективность действия ЛА, оснащенных КИС.
На примерах технической реализации показано достижение технического результата в части повышения точности работы КИС и расширения его функциональных возможностей и, как следствие, повышение эффективности применения оснащаемых им летательных аппаратов.
ЛИТЕРАТУРА
1. Селезнев В.П. Навигационные устройства. - М.: Машиностроение, 1974 г.
2. Бабич О.А. Обработка информации в навигационных комплексах. - М.: Машиностроение, 1991 г.
3. Преснухин Л.Н., Нестеров П.В. Цифровые вычислительные машины. - М.: Высшая школа, 1981 г.
4. Бромберг П.В. Теория инерциальных систем навигации. - М.: Наука, 1979 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС МНОГОФУНКЦИОНАЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2232376C1 |
| РАСПРЕДЕЛЕННЫЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ГРУППЫ МНОГОФУНКЦИОНАЛЬНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2003 |
|
RU2232102C1 |
| СПОСОБ И УСТРОЙСТВО ВЫЧИСЛЕНИЯ ТЕКУЩЕГО ЗНАЧЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2016 |
|
RU2663315C2 |
| ПРИЦЕЛЬНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2009 |
|
RU2392198C1 |
| РАСПРЕДЕЛЕННЫЙ ИНФОРМАЦИОННО-УПРАВЛЯЮЩИЙ КОМПЛЕКС ПОДВИЖНЫХ ОБЪЕКТОВ | 2003 |
|
RU2232377C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ АТАКИ И СКОЛЬЖЕНИЯ ПРИ ЛЕТНЫХ ИСПЫТАНИЯХ ГИПЕРЗВУКОВОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2347193C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2461801C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СКОРОСТИ ВЕТРА НА БОРТУ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО, ЕГО РЕАЛИЗУЮЩЕЕ | 2011 |
|
RU2486527C2 |
| КОМПЛЕКСНАЯ СИСТЕМА ПОДГОТОВКИ И НАВИГАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2010 |
|
RU2434202C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВОЗДУШНО-СКОРОСТНЫХ ПАРАМЕТРОВ МАНЕВРЕННОГО ОБЪЕКТА | 2019 |
|
RU2713585C1 |
Изобретение относится к технике приборостроения, а именно к навигационным приборам для контроля и управления летательными аппаратами. Технический результат - расширение функциональных возможностей. Для достижения данного результата в систему дополнительно введен датчик параметров движения, вход/выход которого подключен к магистрали информационного обмена. В состав вычислительной системы введены блок формирования невязок, блок оценивания скорости ветра, блок прогноза скорости ветра, блок обратного расчета вектора скорости, блок перепроецирования вектора скорости и блок расчета углов атаки и скольжения. 1 ил.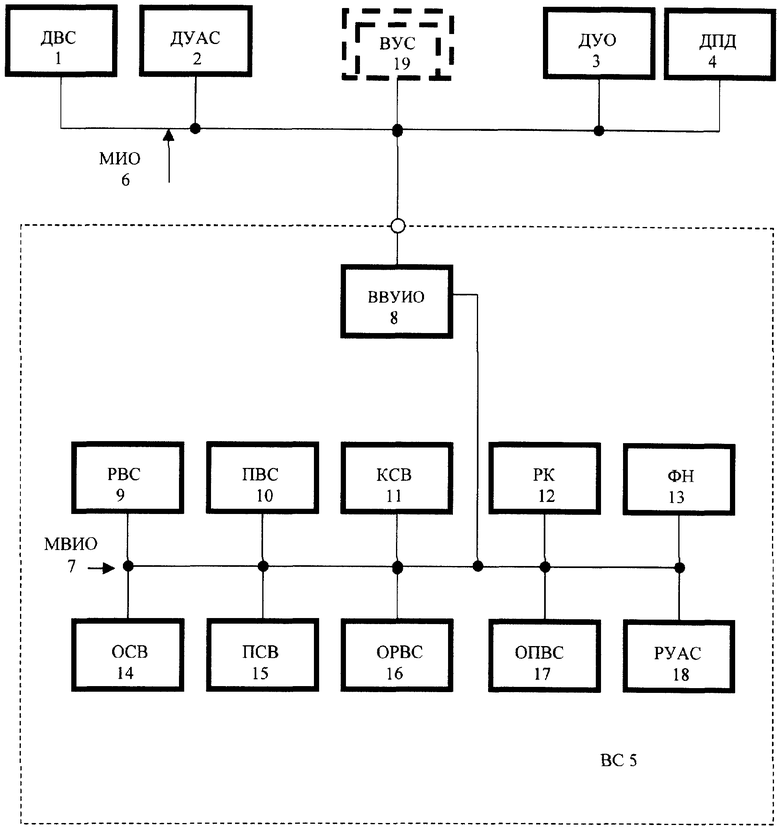
Комплексная информационная система, содержащая соединенные входами/выходами по магистрали информационного обмена датчик воздушной скорости, датчик углов атаки и скольжения, датчик углов ориентации, вычислительную систему, включающую соединенные по магистрали вычислительного информационного обмена блок расчета вектора скорости, блок перепроецирования вектора скорости, блок компенсации скорости ветра, блок расчета координат, блок ввода-вывода и управления информационным обменом, другой вход/выход которого является входом/выходом вычислительной системы, отличающаяся тем, что она дополнительно снабжена датчиком параметров движения, вход/выход которого подключен к магистрали информационного обмена, а также введенными в состав вычислительной системы и подключенными своими входами/выходами к магистрали вычислительного информационного обмена блоком формирования невязок, блоком оценивания скорости ветра, блоком прогноза скорости ветра, блоком обратного расчета вектора скорости, блоком обратного перепроецирования вектора скорости, блоком расчета углов атаки и скольжения.
| Селезнев В.П | |||
| Навигационные устройства | |||
| М | |||
| Машиностроение, 1974, с.268-288 | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
| US 4821216 А, 11.04.1997 | |||
| Задняя бабка металлорежущего станка | 1985 |
|
SU1256862A1 |
| ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
SU1797383A1 |
| US 3630079 А, 28.12.1971 | |||
| КОМПЛЕКСНАЯ КУРСОВАЯ СИСТЕМА | 1996 |
|
RU2098322C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО АДРЕСОВАНИЯ И СОРТИРОВКИ ГРУЗОВ | 0 |
|
SU324195A1 |
| СПОСОБ ПОЛУЧЕНИЯ ОГНЕТУШАЩЕГО ПОРОШКА | 2007 |
|
RU2370295C2 |
| Бабич О.А | |||
| Обработка информации в навигационных комплексах | |||
| - | |||

