Изобретение относится к области комплексных навигационных систем управления и наведения летательных аппаратов (ЛА).
Известен способ оптимального оценивания и коррекции инерциальной информации по измерениям горизонтальных составляющих абсолютной линейной скорости в проекциях на оси опорного трехгранника гироплатформы (ГП) инерциальной навигационной системы (ИНС).
Его описание приведено в разделе «Дополнение к задаче выставки на подвижном основании», написанном Л.Г. Клибановым и В.Л. Леонидовым, известной монографии А. Липтона «Выставка инерциальных систем на подвижном основании», «Наука», М., 1971 г. [1].
В нем рассматривается редуцированная процедура оптимального оценивания в задаче согласования ГП двух ИНС - выставляемой и базовой. Рассмотрение ведется применительно к решению задачи начальной выставки ИНС ракеты по скоростной информации, измеряемой ИНС носителя.
Однотипность измеряемых сигналов, полная адекватность математического описания модели ошибок ИНС и необходимость использования одних и тех же методических приемов повышения наблюдаемости делают рассматриваемый способ по своей технической сущности достаточно близким к предлагаемому способу коррекции по измерениям доплеровского измерителя составляющих скорости (ДИСС), что позволяет принять его в качестве наиболее близкого аналога.
Формализуя приведенное в [1] его описание, приведем его в следующем виде:
Способ оценивания ошибок инерциальной информации и ее коррекции по измерениям ДИСС основанный на процедуре оптимальной фильтрации и идентификации скоростных сигналов измерения, которые формируют путем сравнения горизонтальных составляющих абсолютной линейной скорости, измеренных ИНС, и аналогичных составляющих, сформированных по измерениям ДИСС, при этом само оценивание параметров состояния ИНС осуществляют посредством идентификации сигналов измерения, которую реализуют в соответствии с математическим описанием исходной системы, при этом полет организуют таким образом, что после 270 секунд горизонтального прямолинейного полета, осуществляют маневр, типа «змейки», координированного или боевого разворотов, после чего активную фазу процедуры оптимальной фильтрации и идентификации дискретной последовательности сигналов измерения приостанавливают и фильтр-идентификатор переводят в режим долгосрочного - до следующего сеанса коррекции, прогноза с начальными условиями, определяемыми значениями оценок на момент завершения активной фазы оценивания, и текущими значениями параметров модели сообщения, при этом коррекцию выходных параметров ИНС - составляющих абсолютной линейной скорости, вследствие закрытости и недоступности ключевых управленческих входов каналов коррекции ИНС, осуществляют в разомкнутой схеме с использованием текущих прогнозируемых значений оценок.
Основными недостатками наиболее близкого аналога являются:
- отсутствие в математической модели ошибок ИНС дифференциальных уравнений, описывающих геометрию относительного размещения комплексируемых систем;
- при формировании матрицы наблюдения системы не учитываются погрешности Δϕ, Δλ, Δχ счисления основной тройки навигационных параметров в функции малых углов αх, αy, αz ухода реальной ГП ИНС;
- при выполнении традиционных для рассматриваемого режима коррекции маневров, типа «змейки», координированного или боевого разворотов, вместо ожидаемого, эффективного оценивания всех параметров состояния и, в первую очередь, слабонаблюдаемых, таких, как угол αz азимутального ухода ГП и дрейф εy гироскопа продольного канала, с целью чего и осуществляется маневр, имеет место абсолютно обратная картина расходимости последних и на рушение сходимости остальных;
- не характерные для процедуры оптимального оценивания точность и быстродействие, что является показателем неэффективности оптимальной обработки и коррекции в целом.
Технический результат предлагаемого изобретения - повышение точности и быстродействия оптимального оценивания и коррекции всех измеряемых инерциальной системой параметров в обеспечение эффективного решения навигационных, боевых и специальных задач.
Указанный технический результат достигается за счет того, что в способе оценивания ошибок инерциальной информации и ее коррекции по измерениям доплеровского измерителя скорости, включающем использование классической дискретной процедуры оптимальной фильтрации и идентификации Калмана, для чего входные сигналы оптимального фильтра-идентификатора формируют путем сравнения одноименных горизонтальных составляющих абсолютной линейной скорости, измеренных ИНС и сформированных по измерениям ДИСС, а его структуру синтезируют в соответствии с традиционной для ИНС моделью ошибок, при этом характер полета методически организуют таким образом, что после 270-ти секунд горизонтального прямолинейного полета, на котором реализуют точное «горизонтирование» и оценивают хорошо наблюдаемые параметры горизонтальных каналов ИНС, осуществляют маневр, типа «змейки», координированного или боевого разворотов, после чего активную фазу процедуры оптимальной фильтрации и идентификации приостанавливают и фильтр-идентификатор переводят в режим долгосрочного, до следующего сеанса коррекции, прогноза, для реализации которого сигналы измерения и оптимальные коэффициенты усиления фильтра-идентификатора обнуляют, а значения оценок на момент завершения активной фазы процедуры оценивания используют в качестве начальных условий в процедуре прогноза, при этом сам прогноз осуществляют в соответствии с дискретными уравнениями для расчета априорных оценок ошибок ИНС, а коррекцию выходных параметров ИНС реализуют в разомкнутом контуре, для чего используют текущие прогнозируемые значения оценок, дополнительно, разработанную для рассматриваемого режима коррекции модель ошибок ИНС расширяют за счет включения в нее математического описания координат ее местоположения (размещения) относительно ДИСС, и представляют его в виде системы из трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси опорного трехгранника ГП ИНС, которые одновременно описывают и аддитивно входящие в сигналы измерения составляющие кинематической скорости ИНС относительно ДИСС, и дополнительно, при формировании матрицы наблюдения используют кинематические соотношения, связывающие ошибки Δϕ, Δλ, Δχ счисления географических координат местоположения и угла азимутальной ориентации опорного трехгранника ГП ИНС, с погрешностями выдерживания вертикали αх, αy и углом αz азимутального ухода ГП, которые, с точностью до величин второго порядка малости относительно малых величин αх, αy, αz, Δλ определяют все элементы матрицы наблюдения, чем обеспечивают точное и эффективное оценивание и прогноз таких ошибок автономного инерциального счисления, как ΔVx, ΔVy, αх, αу, αz, Δξ, Δη, Δζ, при этом коррекцию счисленных инерциальной системой географических координат местоположения и угла азимутальной ориентации опорного трехгранника ее ГП реализуют, используя текущие спрогнозированные значения оценок малых углов  ,
,  ,
,  рассогласования реального и опорного трехгранников ГП ИНС и счисленные/откорректированные значения географической широты
рассогласования реального и опорного трехгранников ГП ИНС и счисленные/откорректированные значения географической широты  и угла
и угла  азимутальной ориентации опорного трехгранника ГП ИНС и, в соответствии с кинематическими соотношениями связи Δϕ, Δλ, Δχ с малыми углами αх, αу, αz текущего ухода реальной ГП ИНС, последовательно формируют оценки ошибок
азимутальной ориентации опорного трехгранника ГП ИНС и, в соответствии с кинематическими соотношениями связи Δϕ, Δλ, Δχ с малыми углами αх, αу, αz текущего ухода реальной ГП ИНС, последовательно формируют оценки ошибок  ,
,  ,
,  счисления основных навигационных параметров и последовательно корректируют счисленные значения географических координат
счисления основных навигационных параметров и последовательно корректируют счисленные значения географических координат  ,
,  местоположения и истинного курса ориентации опорного трехгранника
местоположения и истинного курса ориентации опорного трехгранника  ГП ИНС, а для выявления из двух потенциально равноточных ИНС той, угловая информация которой наиболее приемлема для пилотирования и решения боевых и специальных задач, а также для коррекции текущих значений углов тангажа
ГП ИНС, а для выявления из двух потенциально равноточных ИНС той, угловая информация которой наиболее приемлема для пилотирования и решения боевых и специальных задач, а также для коррекции текущих значений углов тангажа  , крена
, крена  , и гироскопического курса
, и гироскопического курса  используют текущие спрогнозированные значения оценок малых углов , , рассогласования реального и опорного трехгранников ГП ИНС и измеренные/откорректированные значения углов тангажа
используют текущие спрогнозированные значения оценок малых углов , , рассогласования реального и опорного трехгранников ГП ИНС и измеренные/откорректированные значения углов тангажа  и гироскопического курса
и гироскопического курса  и, в соответствии с кинематическими соотношениями связи ошибок
и, в соответствии с кинематическими соотношениями связи ошибок  , Δγ, Δψг измерения углов ориентации объекта с малыми углами αх, αу, αz текущего ухода реальной ГП ИНС, последовательно для каждой ИНС формируют текущие значения оценок ошибок измерения углов ориентации объекта
, Δγ, Δψг измерения углов ориентации объекта с малыми углами αх, αу, αz текущего ухода реальной ГП ИНС, последовательно для каждой ИНС формируют текущие значения оценок ошибок измерения углов ориентации объекта  ,
,  ,
,  и рассчитывают текущие значения сумм их квадратов
и рассчитывают текущие значения сумм их квадратов  , посредством сравнения которых выявляют минимальную из них и, тем самым определяют наиболее приемлемую для решения обозначенных задач ИНС, а, при необходимости, последовательно корректируют измеренные значения углов тангажа , крена , и гироскопического курса в соответствии с последовательно рассчитанными значениями оценок , , и коррекцией измеренных углов эволюции объекта по принципу «рассчитал-откорректировал», при этом откорректированное значение истинного курса объекта
, посредством сравнения которых выявляют минимальную из них и, тем самым определяют наиболее приемлемую для решения обозначенных задач ИНС, а, при необходимости, последовательно корректируют измеренные значения углов тангажа , крена , и гироскопического курса в соответствии с последовательно рассчитанными значениями оценок , , и коррекцией измеренных углов эволюции объекта по принципу «рассчитал-откорректировал», при этом откорректированное значение истинного курса объекта  определяют, как сумму оценок и
определяют, как сумму оценок и  .
.
Приведем перечень и описание фигур, которые потребуются при осуществлении изобретения.
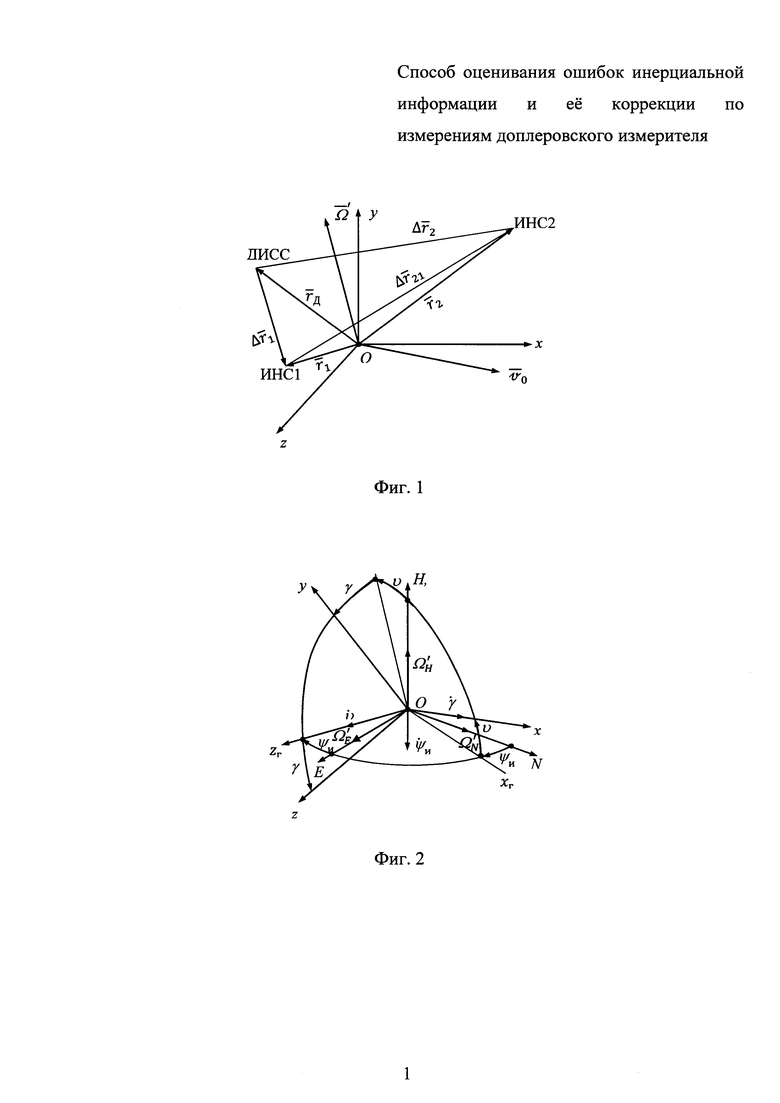
На фиг. 1 представлена схема относительного размещения на объекте ИНС1, ИНС2 и ДИСС.
В качестве параметров, определяющих размещение указанных систем на объекте приняты векторы  ,
,  и
и  , определяющие местоположение соответственно ИНС1, ИНС2 и ДИСС относительно начала (точка О) связанной с объектом системы координат (ССК) Oxyz.
, определяющие местоположение соответственно ИНС1, ИНС2 и ДИСС относительно начала (точка О) связанной с объектом системы координат (ССК) Oxyz.
На схеме также представлены векторы  и
и  , определяющие местоположение ИНС1 и ИНС2 соответственно относительно ДИСС, а также вектор
, определяющие местоположение ИНС1 и ИНС2 соответственно относительно ДИСС, а также вектор  положения ИНС2 относительно ИНС1.
положения ИНС2 относительно ИНС1.
Под ИНС2 следует понимать резервную ИНС, которая введена для общности рассмотрения.
 - вектор путевой скорости объекта.
- вектор путевой скорости объекта.
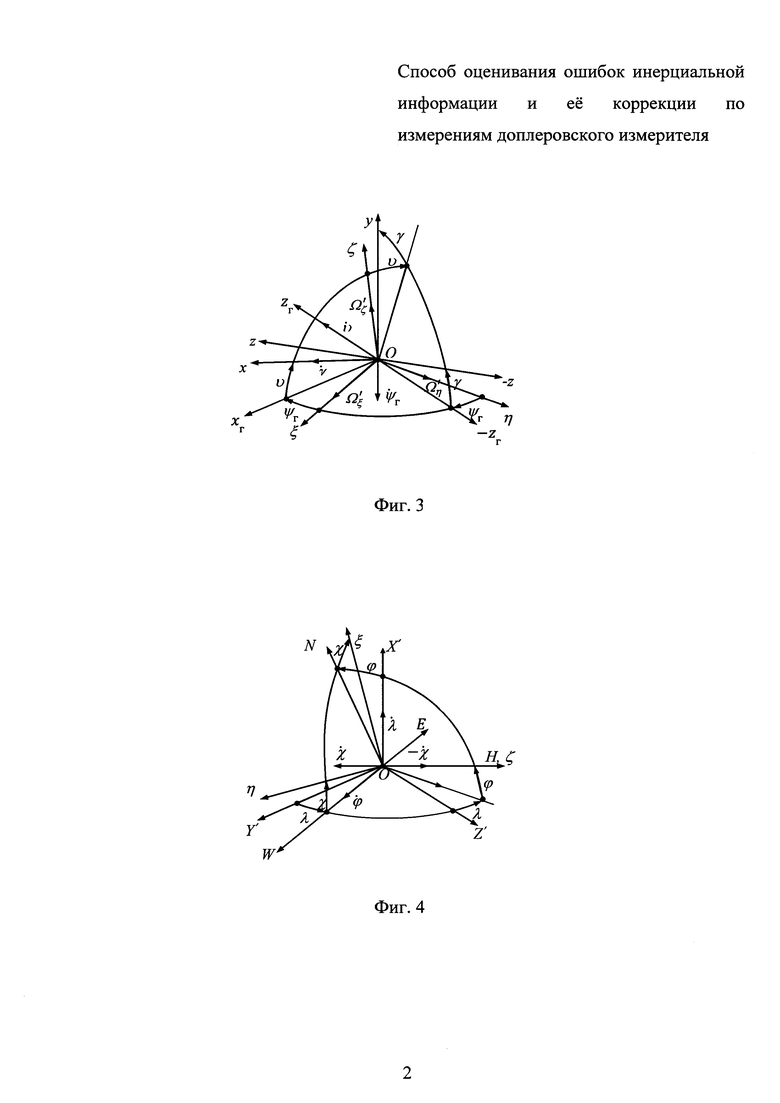
На фиг. 2 приведена взаимная ориентация географического сопровождающего трехгранника (ГСТ) ONHE и ССК Oxyz.
Их рассогласование определяется углами истинного курса , тангажа υ и крена γ объекта.
Переход от осей ГСТ ONHE к осям ССК Oxyz осуществляется посредством трех последовательных поворотов на углы , υ и γ с угловыми скоростями  ,
,  и
и  .
.
Приведенное на фиг. 2 направление отсчета углов , υ, γ и угловых скоростей , , является положительным.
На фиг. 3 приведена взаимная ориентация опорного трехгранника гироплатформы (ОТГП) ОξηζИНС и ССК Oxyz.
Их рассогласование определяется углами гироскопического курса , тангажа υ и крена γ объекта.
Переход от осей ОТГП Оξηζ ИНС к осям ССК Oxyz осуществляется посредством трех последовательных поворотов на углы , υ и γ с угловыми скоростями  ,
,  и
и  .
.
Приведенное на фиг. 3 направление отсчета углов , υ и γ и угловых скоростей , и является положительным.
На фиг. 4 приведена взаимная ориентация гринвичской системы координат (ГСК) OX'Y'Z', ОТГП ОξηζИНС и ГСТ ONHE.
Их рассогласование определяется углами географической долготы λ, широты ϕ и углом χ азимутальной ориентации ОТГП ОξηζИНС.
Переход от осей ГСК OX'Y'Z' к осям ГСТ ONHE и далее к осям ОТГП Оξηζ осуществляется посредством последовательных поворотов на углы λ и ϕ и далее на угол χ (см. фиг. 4) с угловыми скоростями  ,
,  , и
, и  .
.
Приведенное на фиг. 4 направление отсчета углов λ, ϕ и χ и угловых скоростей , , и и их изменения следует считать положительным.
С целью раскрытия физической сути и математического содержания предлагаемых алгоритмических и математических решений приведем их подробное описание.
Но прежде - обоснование необходимости алгоритмического учета относительного размещения задействованных в инерциально-допплеровской коррекции информационных систем ИНС и ДИСС.
При разработке алгоритма оптимальной коррекции ИНС по измерениям ДИСС исключительно важное значение имеет вопрос методического обеспечения раздельного наблюдения и оценивания всех, без исключения, параметров состояния ИНС и, в первую очередь, слабоонаблюдаемых, таких, как угол αz азимутального рассогласования реального и опорного трехгранников в гироплатформы ГП ИНС и нескомпенсированного ухода - дрейфа εy гироскопа продольного канала. В лабораторных условиях и для случая неподвижного объекта указанные параметры ненаблюдаемы и, как следствие, раздельно не оцениваются.
В условиях же движущегося объекта для обеспечения наблюдаемости указанных параметров нет никакой необходимости в реализации каких-то дополнительных методических решений. И это связано, исключительно, с тем, что само движение объекта является достаточно эффективным инструментом, позволяющим управлять динамикой изменения ошибок выходных параметров ИНС от всех, без исключения, параметров состояния и, как следствие, их наблюдаемостью.
При этом, чтобы обеспечить максимальную эффективность связей всех параметров состояния с выходными сигналами ИНС, такими, как географическая широта ϕ и долгота λ, и горизонтальные составляющие Vx, Vy абсолютной скорости, необходимо выполнение маневров, типа «змейки», координированного или боевого разворотов.
Выполнение упомянутых маневров, сопровождающихся достаточно интенсивным изменением угловой и пространственной ориентации объекта и, как следствие, высокодинамичным изменением составляющих его угловой и путевой скорости, при различном конструктивном размещении задействованных в рассматриваемых режимах коррекции информационных систем, приводят к появлению в сигналах измерения так называемых кинематических составляющих скорости.
Указанные составляющие скорости, будучи математически не описанными, и, как следствие, алгоритмически неучтенными, а это действительно так, вместо методически обоснованного и ожидаемого оценивания слабонаблюдаемых параметров приводят к совершенно обратному результату, а именно, к расходимости процедуры их оценивания.
Игнорирование спецификой этого явления приводит к таким выводам, типа: «курсовые ошибки хорошо оцениваются при наличии двух участков коррекции по 5…10 мин каждый, разделенных маневром по скорости и/или курсу» (см. Научно-технический журнал «Инженерная физика» №12/2012, стр. 49, 16 строка сверху).
В действительности курсовая ошибка оценивается хорошо, если она оценивается за 0,5-1 мин одного из упомянутых выше маневров.
При этом «наличие двух участков коррекции по 5…10 мин. каждый» не имеет никакого физического объяснения.
Да, для качественного оценивания параметров горизонтальных каналов ИНС необходим участок коррекции длительностью, не более 4-4,5 минут, после чего осуществляется маневр, обеспечивающий оценивание азимутальной ошибки и не ухудшающий, что особенно важно, результаты проведенного «горизонтирования».
В представленном выше случае из «Инженерной физики» маневр не только не обеспечивает оценивание азимутальной ошибки, но даже ухудшает результаты «горизонтирования», проведенного на первом 5…10-ти минутном участке коррекции.
И чтобы как-то сгладить последствия проведенного маневра, очевидно, и потребовался второй 5…10-ти минутный участок коррекции.
А теперь из общих физических представлений получим математическую модель, описывающую геометрию относительного размещения основных информационных систем на объекте, типа самолета или вертолета, и покажем, что указанная модель одновременно описывает упоминавшиеся выше кинематические составляющие скорости.
Для этого приведем вывод дифференциальных уравнений, описывающих характер изменения координат местоположения ИНС относительно ДИСС в проекциях на оси ГСТ ONHE и ОТГП ИНС Оξηζ.
Для вывода указанных дифференциальных уравнений воспользуемся схемой относительного размещения на объекте таких информационных систем, как ИНС1, ИНС2 и ДИСС, приведенной на фиг. 1.
На указанной схеме начало связанной с объектом системы координат Oxyz совмещено с центром его тяжести (ЦТ), а местоположение ИНС1, ИНС2 и ДИСС определяется векторами 
 и
и  . Это означает, что при векторе угловой скорости
. Это означает, что при векторе угловой скорости  вращения объекта вокруг его ЦТ будут иметь место линейные перемещения ИНС1, ИНС2 и ДИСС со скоростями вида:
вращения объекта вокруг его ЦТ будут иметь место линейные перемещения ИНС1, ИНС2 и ДИСС со скоростями вида:

где - вектор предписанной заданием путевой скорости объекта - его ЦТ.
В соответствии с представленными на фиг. 1 векторными треугольниками О-ИНС1-ДИСС и O-ИНС2-ДИСС, запишем следующие полезные матричные равенства:

где 
 - вектора местоположения ИНС1 и ИНС2 соответственно относительно ДИСС.
- вектора местоположения ИНС1 и ИНС2 соответственно относительно ДИСС.
Очевидно, что сравнение скоростей 
 перемещения ИНС1 и ИНС2 со скоростью
перемещения ИНС1 и ИНС2 со скоростью  ДИСС приведет к выражениям вида:
ДИСС приведет к выражениям вида:


Из приведенных выражений следует, что скорости  и
и  движения ИНС1 и ИНС2 относительно ДИСС однозначно определяются угловой скоростью Ω' объекта вокруг его ЦТ и местоположением ИНС1 и ИНС2 относительно ДИСС Δr1, Δr2 (2).
движения ИНС1 и ИНС2 относительно ДИСС однозначно определяются угловой скоростью Ω' объекта вокруг его ЦТ и местоположением ИНС1 и ИНС2 относительно ДИСС Δr1, Δr2 (2).
Выше  представлена, как угловая скорость вращения объекта вокруг ЦТ. Но этого абсолютно недостаточно для полной характеристики рассматриваемой скорости, поскольку не ясно, относительно какой системы координат следует рассматривать вращение объекта, а посему непонятна процедура ее расчета.
представлена, как угловая скорость вращения объекта вокруг ЦТ. Но этого абсолютно недостаточно для полной характеристики рассматриваемой скорости, поскольку не ясно, относительно какой системы координат следует рассматривать вращение объекта, а посему непонятна процедура ее расчета.
Для ответа на эти вопросы введем в рассмотрение абсолютную угловую скорость  вращения объекта и абсолютную угловую скорость
вращения объекта и абсолютную угловую скорость  вращения географического сопровождающего трехгранника ГСТ ONHE.
вращения географического сопровождающего трехгранника ГСТ ONHE.
Понятие абсолютной угловой скорости вращения означает вращение чего-то относительно инерциальной системы координат. В рассматриваемом случае и -это угловые скорости объекта и ГСТ ONHE относительно инерциальной системы отсчета.
Очевидно, что угловая скорость вращения объекта относительно ГСТ ONHE будет равна разности угловых скоростей и :

Учитывая, что векторы , , , жестко связанные с объектом, изменяют свои проекции на оси ГСТ ONHE, исключительно только за счет вращения связанной с объектом системы координат Oxyz относительно ГСТ ONHE, угловая скорость которого определяется выражением (4), то, очевидно, справедливы следующие выражения для их производных:

Сравнивая 1-ую и 2-ую производные с 3-ей, получим выражения:

которые, с учетом (2), можно записать в следующем виде:

Сравнивая полученные векторные выражения (7) с полученными ранее (3) и объединяя их, можно записать следующие обобщенные выражения вида:

Если представить полученные выражения в скалярном виде, в проекциях на оси географического сопровождающего трехгранника ГСТ ONHE, то они приобретут вид, вполне приемлемый для их алгоритмического использования.
Приведем его:


где  ,
,  ,
,  , и
, и  ,
,  ,
,  - проекции векторов
- проекции векторов  и
и  (2) на оси ГСТ ONHE.
(2) на оси ГСТ ONHE.
Полученные выражения имеют вид дифференциальных уравнений первого порядка, представленных в нормальной форме Коши, что, кстати, и необходимо для описания исходной системы - модели сообщения в традиционной процедуре оптимального оценивания. Это, если смотреть на приведенные дифференциальные уравнения слева.
С другой стороны, если на (9) и (10) смотреть справа, то это будут выражения для расчета составляющих скорости перемещения ИНС1 (9) и ИНС2 (10) относительно ДИСС.
В некоторых случаях вместо уравнений/выражений (9), (10), представленных в проекциях на оси ГСТ ONHE, целесообразно использовать аналогичные уравнения/выражения, но в проекциях на оси опорного трехгранника гироплатформы ОТГП ИНС Оξηζ.
Очевидно, что указанные уравнения/выражения, по аналогии с (9), (10) будут иметь следующий вид:


где Δξ1, Δη1, Δζ1, и Δξ2, Δη2, Δζ2 - текущие значения координат местоположения ИНС1/БИНС1 и ИНС2/БИНС2 относительно ДИСС в проекциях на оси ОТГП ИНС Оξηζ, a ΔV1ξ, ΔVlη, ΔV1ζ и ΔV2ξ, ΔV2η, ΔV2ζ - кинематические составляющие скорости движения ИНС1 и ИНС2 в проекциях на те же оси.
В процедуре оптимальной фильтрации и идентификации ошибок ИНС по измерениям ДИСС приведенные выше дифференциальные уравнения (11), (12) должны использоваться, как составная часть традиционных моделей ошибок ИНС, разработанных на основе математического описания их функционирования и в полном соответствии с основополагающим принципом невозмущенного измерения ускорений.
Включение полученных выше дифференциальных уравнений (11), (12) в проекциях на оси ОТГП ИНС Оξηζ в состав традиционной для инерциально-допплеровского режима коррекции модели ошибок ИНС позволяет получить ее расширенную модель, которая описывает не только традиционные для ИНС параметры и их связи, но и те кинематические составляющие сигналов измерения, которые ранее не учитывались.
И это обстоятельство является причиной несостоятельности существующих алгоритмов оптимального оценивания и коррекции результатов автономного инерциального счисления.
Расширение модели ошибок ИНС позволяет устранить основную причину алгоритмической несостоятельности известных алгоритмов коррекции, заключающуюся в некорректном математическом описании исходной системы, и обеспечить тем самым гарантированную наблюдаемость и устойчивую сходимость всех и, в первую очередь, слабонаблюдаемых параметров состояния, таких, как αz, εy, Δni(Δξi), Δhi(Δζi), Δеi(Δηi).
Для алгоритмического использования полученных выше дифференциальных уравнений (11), (12) необходимо знать текущие значения входных для указанных уравнений параметров, а именно, составляющих  ,
,  ,
,  относительной угловой скорости вращения объекта.
относительной угловой скорости вращения объекта.
Приведем возможные математические процедуры расчета рассматриваемых угловых скоростей. Для этого воспользуемся приведенной на фиг. 2, 3, 4 взаимной ориентацией ГСК OX'Y'Z', ГСТ ONHE, ОТГП ИНС Оξηζ и ССК Oxyz.
Очевидно, что угловые скорости вращения ССК Oxyz относительно ГСТ ONHE определяются угловыми скоростями  ,
,  ,
,  эволюции объекта по истинному курсу, крену и тангажу. При этом угловые скорости
эволюции объекта по истинному курсу, крену и тангажу. При этом угловые скорости  ,
,  ,
,  и
и  ,
,  ,
,  угловой скорости объекта относительно ГСТ ONHE и ОТГП Оξηζ могут быть определены путем приведения компонент , , и
угловой скорости объекта относительно ГСТ ONHE и ОТГП Оξηζ могут быть определены путем приведения компонент , , и  ,
,  , к осям ГСТ и ОТГП соответственно. Очевидно, они будут равны (см. фиг. 2, 3):
, к осям ГСТ и ОТГП соответственно. Очевидно, они будут равны (см. фиг. 2, 3):


Здесь (13), (14) и далее под «s» следует понимать синус угла, а под «с» - косинус.
Приведенные выражения могут быть использованы для расчета искомых составляющих угловой скорости.
При этом производные  ,
,  ,
,  ,
,  целесообразно определять методом численного дифференцирования с дискретом 0,1 сек.
целесообразно определять методом численного дифференцирования с дискретом 0,1 сек.
Выражения (14), (15) могут быть использованы по их назначению как по измерениям ИНС, так и по измерениям БИНС.
На практике может быть использован и другой подход расчета рассматриваемых составляющих угловой скорости объекта, но он может быть реализован исключительно только по измерениям БИНС. Он представляется несколько более сложным, но его достоинством является отсутствие необходимости выполнения операций численного дифференцирования, что немаловажно.
Указанный вариант расчета рассматриваемых составляющих угловой скорости объекта основан на определении относительной угловой скорости и предполагает знание, как абсолютной угловой скорости вращения объекта, так и абсолютных угловых скоростей вращения ГСТ и ОТГП. При этом искомые угловые скорости находятся, как разности абсолютной угловой скорости объекта и соответственно двух вторых. По причине того, что абсолютная угловая скорость объекта измеряется исключительно только системами, типа БИНС, указанный подход может быть использован только при их коррекции.
Учитывая, что составляющие абсолютной угловой скорости объекта, измеряемые БИНС, выдаются в проекциях на оси связанной системы координат, необходимо их предварительное преобразование по осям ГСТ ONHE и ОТГП Оξηζ.
Для этого запишем прямые и обратные матричные преобразования для систем координат, приведенных на фиг. 2 и фиг. 3:
 ,
,
 ,
,
В соответствии с фиг. 2 и фиг. 3, матрицы для реализации указанных процедур, очевидно, имеют следующий вид:


В соответствии с матрицей (16) выражения для составляющих абсолютной угловой скорости объекта в проекциях на оси ГСТ ONHE будут иметь следующий вид:

Аналогичные выражения в проекциях на оси ОТГП Оξηζ, будут равны:

Для определения составляющих абсолютной угловой скорости ГСТ ONHE и ОТГП Оξηζ, введем в рассмотрение гринвическую систему координат OX'Y'Z', ось ОХ' которой ориентирована по оси мира и совпадает с угловой скоростью суточного вращения Земли, ось OZ' совпадает с линией пересечения плоскостей экватора и гринвического меридиана, а ось OY' дополняет их до правого ортогонального трехгранника. Взаимная ориентация указанной системы координат и ГСТ ONHE, ОТГП Оξηζ приведена на фиг. 4.
Все представленные на фиг. 4 углы, а именно угол географической широты ϕ, долготы λ и угол χ азимутальной ориентации опорного трехгранника гироплатформы ИНС, также, как и угловые скорости их изменения имеют положительное направление отсчета.
Для нахождения абсолютной угловой скорости ГСТ ONHE запишем выражения для угловой скорости вращения ГСТ ONHE относительно трехгранника OX'Y'Z', связанного с Землей, в проекциях на оси ГСТ ONHE. В соответствии с фиг. 4, они, очевидно, будут равны:

где приняты следующие обозначения:

где  ,
,  - северная и восточная составляющие путевой скорости объекта, RN, RE - главные радиусы кривизны земного эллипсоида вращения
- северная и восточная составляющие путевой скорости объекта, RN, RE - главные радиусы кривизны земного эллипсоида вращения
Очевидно, что искомые абсолютные составляющие угловой скорости вращения ГСТ будут равны сумме составляющих (20) и соответствующих проекций, обусловленных суточным вращением Земли, а именно:

 ,
,
где составляющие uN и uH равны

а u - скорость суточного вращения Земли.
Следовательно, искомые составляющие угловой скорости объекта относительно ГСТ ONHE будут равны:

где ΩN, ΩH, ΩE определяются выражениями (18), a ωN, ωH, ωE выржениями (22).
Для определения составляющих относительной угловой скорости ОТГП Оξηζ, в соответствии с фиг. 3, приведем все три угловые скорости  ,
,  ,
,  к осям ОТГП Оξηζ. В результате получим:
к осям ОТГП Оξηζ. В результате получим:

Выражения для и представлены выше (21).
Очевидно, что выражения для составляющих абсолютной угловой скорости ОТГП будут равны сумме составляющих (25) и соответствующих составляющих угловой скорости суточного вращения Земли:


где uN,uH определяются выражениями (23).
Выражения для искомых составляющих угловой скорости вращения объекта относительно ОТГП Оξηζ будут равны:

где Ωξ, Ωη, Ωζ определяются выражениями (19), a ωξ, ωη, ωζ - выражениями (26).
Выше рассмотрены вопросы математически корректного описания исходной системы, которое достигается расширением традиционной для подобных систем модели ошибок путем включения в нее нетрадиционных для ИНС дифференциальных уравнений, описывающих характер изменения координат ее установки на объекте относительно той информационной системы, которая выполняет функции измерителя.
Необходимость этого расширения обусловлена тем, что только в этом случае достаточно просто и эффективно может быть обеспечен алгоритмический учет и устранение всех нежелательных последствий, к которым приводят кинематические составляющие скорости, имеющие место при маневре объекта и обусловленные геометрией относительного размещения задействованных в рассматриваемых режимах информационных систем.
При этом, предлагаемое решение следует рассматривать, как базис, на основе которого должна синтезироваться унифицированная структура оптимального фильтра-идентификатора, способного оценивать весь, расширенный перечень параметров состояния ИНС для общего случая движения объекта, включая выполнение таких маневров, как координированный и боевой развороты, «змейка», а также фигур высшего пилотажа, алгоритмических показаний к неприменению которых нет никаких.
Круг задач, при решении которых предполагается использовать предлагаемый способ, не ограничивается рассматриваемым. В частности он может быть использован и при синтезе оптимальной процедуры оценивания и коррекции полного перечня возмущенно-скоростных параметров.
Далее рассмотрим важнейшие для разрабатываемого алгоритма операции, которые определяют физическую суть предлагаемого инженерного решения.
При разработке (выводе) модели ошибок ИНС важное значение имеет форма представления их выходных сигналов по скорости, которая не только определяет вид матрицы наблюдения, но от нее существенным образом зависит и сама модель ошибок ИНС.
Не приводя и не анализируя возможные формы указанного представления, следует отметить, что наиболее аналитически проработанным и приемлемым для решения рассматриваемых задач является представление вида:

где: Vξ, Vη, Vζ - составляющие абсолютной линейной скорости ГП ИНС в проекциях на оси ОТГП Оξηζ; αх, αy, αz - углы рассогласования реального и опорного трехгранников ГП; ΔVx, ΔVy - погрешности измерения/расчета горизонтальных составляющих абсолютной скорости, входящие, наряду с малыми углами αх, αy, αz рассогласования, в перечень параметров состояния ИНС.
Составляющие (27) по своей физической сути являются чисто инерциальными и в явном виде не включают в себя компоненты скорости кинематического характера.
Кинематические составляющие скорости будут представлены при сравнении составляющих скорости (27) и аналогичных составляющих, сформированных по текущим измерениям ДИСС.
Прежде, чем переходить к рассмотрению этих вопросов, целесообразно отметить, что при этом, впервые в практике разработки подобных алгоритмов, будут использованы известные кинематические соотношения, связывающие погрешности Δϕ, Δλ, Δχ автономного инерциального счисления основных навигационных параметров с ошибками αх, αу выдерживания вертикали ИНС углом αz азимутального ухода ее гироплатформы ГП.
Указанные соотношения имеют следующий вид:
Следует также отметить, что приведенные соотношения правомочны исключительно для режима автономного инерциального счисления и никаким образом они не могут быть распространены на такие автономные режимы, как курсодоплеровский КДР, или курсовоздушный КВР режимы счисления.
В соответствии с изложенным, становится понятным, что с целью математически корректного определения всех параметров модели наблюдения, необходимо, без каких либо допущений, сформировать горизонтальные составляющие абсолютной линейной скорости с использованием измерений ДИСС и отдельных параметров, счисленных ИНС. К последним относятся счисленные значения географической широты  и угла
и угла  азимутальной ориентации ГП.
азимутальной ориентации ГП.
Учитывая, что указанные составляющие должны быть сформированы в проекциях на оси ОТГП Оξηζ первой операцией, которая должна быть реализована, это приведение составляющих скорости  ,
,  ,
,  , измеренных ДИСС, к осям ОТГП.
, измеренных ДИСС, к осям ОТГП.
Указанная операция достаточно просто может быть реализована в соответствии с матричным соотношением вида (фиг. 3):

В соответствии с (29) и видом матрицы  (16), выражения для расчета составляющих
(16), выражения для расчета составляющих  ,
,  ,
,  будут иметь следующий вид:
будут иметь следующий вид:

Приведенные выражения для расчета составляющих , , путевой скорости объекта по измерениям ее компонент  ,
,  ,
,  в проекциях на оси ССК Oxyz предполагают использование точных углов ψг, υ, γ эволюции объекта.
в проекциях на оси ССК Oxyz предполагают использование точных углов ψг, υ, γ эволюции объекта.
Не располагая указанными углами, подставим в выражения (30) вместо ψг, υ, γ значения, определяемые соотношениями (см. (59)):

в которых  ,
,  ,
,  - измеренные значения углов эволюции объекта; Δγ, Δυ, Δψг - погрешности их измерения.
- измеренные значения углов эволюции объекта; Δγ, Δυ, Δψг - погрешности их измерения.
Можно показать, что подстановка (30.1) в выражения для , , (30), приведет к их следующему представлению:

где приняты следующие обозначения для ошибочно рассчитанных составляющих  ,
,  ,
,  путевой скорости и ошибок
путевой скорости и ошибок  ,
,  их расчета:
их расчета:



Подставляя в (30.4) вместо Δψг, Δυ, и Δγ их значения в функции малых углов αх, αy, αz рассогласования реального и опорного трехгранников ГП ИНС (28), (58), получим их следующее представление:

в котором приняты следующие обозначения:
В приведенных выражениях (30.4), (30.6), (30.7) под  ,
,  ,
,  ,
,  следует понимать соответствующие элементы матрицы
следует понимать соответствующие элементы матрицы  (16), но в функции измеренных углов эволюции объекта
(16), но в функции измеренных углов эволюции объекта  ,
,  ,
,  .
.
Все последующие операции будут исполнены на основе использования инерциальной информации и кинематических соотношений (28), связывающих ошибки счисления основных навигационных параметров Δϕ, Δλ, Δχ и углов αх, αy, αz рассогласования реального и опорного трехгранников ГП ИНС.
Учитывая, что эти операции приводятся впервые, представим их без сокращений.
Запишем выражение для идеальной восточной составляющей  , обусловленной суточным вращением Земли:
, обусловленной суточным вращением Земли:

где ϕ - идеальное значение географической широты.
Учитывая, что идеальная широта, в общем случае, не известна, представим ее в виде:

где:  - счисленное значение широты, а Δϕ - погрешность счисления.
- счисленное значение широты, а Δϕ - погрешность счисления.
Подставляя (32) в (31), получим следующее выражение для :

Подставим в (33) вместо Δϕ его значение в функции малых углов αх, αy и счисленного значения  (28).
(28).
В результате получим следующее искомое выражение, определяющее :

Выражения для записано с точностью до величин второго порядка малости относительно αх, αу, αz, Δλ. Очевидно, что выражения для проекций на оси опорного трехгранника ГП будут равны (фиг. 4):

С учетом того, что идеальное значение угла азимутальной ориентации ОТГП Oξηζ, по аналогии с (32) равно:

a приведено выше (34), выражения для горизонтальных составляющих  ,
,  (51) примут вид:
(51) примут вид:

Подставляя в (37) вместо Δχ его значение в функции αz, Δλ и  :
:
 ,
,
получим их следующее представление:

Учитывая, что для Δλ справедливо следующее соотношение из системы трех приведенных выше кинематических соотношений (28):
и подставляя его в полученные выше выражения (38), приведем их к следующему окончательному виду:
Если к составляющим (39) прибавить соответствующие составляющие путевой скорости (30.2), то, с упомянутой выше точностью, определяемой величинами второго порядка малости относительно αх, αу, αz, Δλ, будут получены горизонтальные составляющие абсолютной линейной скорости объекта, то есть:

Подставим (39) в (40). В результате, с точностью до величин второго порядка малости относительно αх, αу, αz, будут получены выражения для Vξ, Vη. Приведем их:

 ,
,
Запишем полученные выражения в несколько ином виде, а именно:
Сравнивая выражения (27) и (42), а конкретно, вычитая из левых частей выражений (27) левые части выражений (42), и аналогично, для правых частей указанных выражений с обязательным учетом кинематических составляющих скорости, имеющих место при маневренном полете объекта и обусловленных координатами Δξ, Δη, Δζ относительно размещения рассматриваемых систем (ИНС, ДИСС), получим следующие уравнения связи:
где W1, W2 - нормальные некоррелированные шумы измерения с известными интенсивностями.
Обозначим левые части полученных уравнений связи через z1 и z2:

Приведенные выражения в дальнейшем будем рассматривать, как выражения для расчета сигналов измерения оптимального фильтра-идентификатора параметров комплексной системы ИНС+ДИСС.
Следует обратить внимание, что выражения (44) в качестве сигналов измерения выбраны неслучайно, поскольку все параметры в правой их части являются либо измеренными, либо рассчитанными, то есть проблем с их формированием нет никаких.
Правые части полученных уравнений связи (43) - это развернутое представление матричного выражения вида:

где х - вектор параметров состояния рассматриваемой системы, Н - матрица наблюдения.
Следовательно, по правым частям указанных уравнений (43), после их соответствующей компоновки, может быть сформирована матрица наблюдения Н.
Для этого в правых частях получаемых выше уравнений связи приведем подобные члены, группируя их по параметрам состояния системы, в число которых входят ΔVx, ΔVy, αх, αy, αz, Δξ, Δη, Δζ (перечислены только те параметры, которые есть в рассматриваемых уравнениях). Кстати для полного перечня параметров состояния рассматриваемой системы среди перечисленных не хватает трех, а именно, нескомпенсированных систематических уходов гироскопов εx, εy, εz.
После приведения подобных членов в правых частях рассматриваемых уравнений с учетом выражений (30.5) для  и
и  , они могут быть представлены в следующем, удобном для формирования матрицы наблюдения виде:
, они могут быть представлены в следующем, удобном для формирования матрицы наблюдения виде:
Для формирования матрицы наблюдения необходимо знать порядок следования параметров состояния системы ИНС+ДИСС в векторе оцениваемых параметров. Приведем его:

В соответствии с (46) и (47) матрица наблюдения будет иметь следующий вид:

Из приведенной матрицы наблюдения (48) и выражений (47) следует, что в рассматриваемом режиме инерциально-доплеровской коррекции практически все параметры состояния, кроме εx, εy, εz, имеют прямую непосредственную связь и, как следствие, влияние на выходные - измеряемые сигналы ИНС, что свидетельствует о потенциальной наблюдаемости указанных сигналов.
Способность параметров состояния рассматриваемой системы напрямую влиять на характер изменения выходных-измеряемых сигналов ИНС следует рассматривать, как необходимое условие их наблюдаемости. И главное при этом -это заставить эти потенциально существующие связи между конкретными параметрами и измеряемыми сигналами - «дышать». И основным инструментом управления этими связями является движение объекта, а конкретно, различные виды выполняемых им маневров. И это важно, прежде всего, при управлении процедурой оценивания слабонаблюдаемых параметров.
Отличительной особенностью предлагаемого способа коррекции ИНС по измерениям ДИСС, выделяющей его из всего многообразия существующих алгоритмов, является то, что, для точного оценивания всего перечня параметров состояния ИНС и, как следствие, реализации эффективной процедуры коррекции в целом, включая и коррекцию автономно счисленных координат местоположения, впервые в практике разработки алгоритмов подобного типа, помимо алгоритмического учета геометрии относительного пространственного размещения задействованных в коррекции систем ИНС+ДИСС, при формировании сигналов измерения используются кинематические выражения погрешностей счисления основной тройки навигационных параметров Δϕ, Δλ, Δχ в функции углов рассогласования αх, αу, αz реального и опорного трехгранников ГП и угла χ ее текущей азимутальной ориентации. При этом преследуется цель обеспечения максимально корректного и математически строгого описания исходной системы, которая работает, исключительно, на достижение заявленной выше основной цели предлагаемого способа коррекции, а именно, на повышение его точности и быстродействия. Именно указанный подход, при отсутствии точных навигационных параметров, таких, как ϕ, λ, χ, позволяет, с точностью до величин второго порядка малости, относительно таких параметров, как малые углы αх, αу, αz рассогласования реального и опорного трехгранников ГП, получить искомые математически строгие и информационно обеспеченные выражения для определения сигналов измерения оптимального идентификатора ошибок ИНС и элементов его матрицы наблюдения.
Наличие точных оценок  ,
,  погрешностей выдерживания вертикали и оценки
погрешностей выдерживания вертикали и оценки  угла азимутального ухода ГП позволяет не только откорректировать составляющие (27) абсолютной скорости, но и последовательно, в соответствии с (28) сформировать оценки ошибок
угла азимутального ухода ГП позволяет не только откорректировать составляющие (27) абсолютной скорости, но и последовательно, в соответствии с (28) сформировать оценки ошибок  ,
,  ,
,  и откорректировать счисленные инерциальной системой географические координаты местоположения
и откорректировать счисленные инерциальной системой географические координаты местоположения  ,
,  и угол
и угол  азимутальной ориентации ГП.
азимутальной ориентации ГП.
Учитывая, что процедура оптимальной коррекции всех параметров состояния ИНС в классическом варианте ее исполнения с оцениванием и управлением в соответствии с известной теоремой разделения, для современных ИНС является невозможной, вследствие их закрытости, по причине отсутствия доступа к основным управленческим точкам измерительных каналов рассматриваемых систем, поэтому не остается ничего более приемлемого, как ее программная реализация по разомкнутой схеме, или иначе, в БЦВМ комплекса.
Для оценивания всех ошибок ИНС, математическое описание которых представлено в виде расширенной системы взаимосвязанных дифференциальных уравнений первого порядка, необходимо предусмотреть два участка полета.
На первом горизонтальном участке прямолинейного полета без ускорений осуществляется так называемое «горизонтирование» гироплатформы с оцениванием хорошо наблюдаемых параметров горизонтальных каналов ИНС, таких как ΔVx, ΔVy, αx, αy, εx и согласованное (не раздельное) оценивание слабонаблюдаемых паараметров, типа αz, εy. Длительность этого участка коррекции составляет не более 4,5-5-ти минут, по окончании которого, с целью точного оценивания слабонаблюдаемых параметров, выполняется маневр, типа «змейки», координированного или боевого разворотов.
Длительность маневра, как правило, не превышает 30-40 сек.
В результате его выполнения осуществляется точное оценивание таких параметров состояния, как αz, εy, Δξ, Δη, Δζ, а также доуточнение оценки дрейфа εz азимутального гироскопа. Точное оценивание координат Δξ, Δη, Δζ, местоположения ИНС относительно ДИСС является показателем качества оценивания и алгоритмического учета кинематических составляющих скорости.
По окончании маневра завершается активная фаза оптимального оценивания ошибок автономного инерциального счисления, основанная на рекуррентной процедуре обработки, фильтрации и идентификации постоянно обновляющейся входной последовательности сигналов, формируемых по измерениям ИНС и ДИСС.
После чего фильтр-идентификатор переводят в режим долгосрочного - до следующего сеанса коррекции, прогноза полученных оценок.
Особенностью его работы в режиме прогноза является обнуление входных сигналов фильтра и приостановка математической процедуры расчета оптимальных коэффициентов усиления, которые на все время прогноза принимаются равными нулю.
При этом в качестве начальных значений оценок в процедуре прогноза используют их значения, полученные по завершении маневра, а все значения коэффициентов, взвешивающих рассматриваемые оценки, рассчитываются в соответствии с их аналитическим представлением в расширенной модели ошибок ИНС. При этом для их расчета используются текущие значения автономно счисленных/откорректированных параметров.
Далее, полученные в результате прогноза значения оценок будем обозначать так же, как и оптимальные оценки, а именно,  ,
,  ,
,  ,
,  ,
,  …, а счисленные значения инерциальных параметров, как
…, а счисленные значения инерциальных параметров, как  ,
,  ,
,  , Vx, Vy ….
, Vx, Vy ….
Приведем процедуру коррекции составляющих абсолютной скорости.
В соответствии с выражениями (27) текущие значения составляющих скорости, формируемые ИНС, имеют вид:

Очевидно, что зная текущие - спрогнозированные значения оценок  ,
,  ,
,  ,
,  ,
,  , в соответствии с представленными выше выражениями, достаточно просто могут быть рассчитаны текущие, откорректированные составляющие
, в соответствии с представленными выше выражениями, достаточно просто могут быть рассчитаны текущие, откорректированные составляющие  ,
,  абсолютной линейной скорости. Выражения для их расчета имеют вид:
абсолютной линейной скорости. Выражения для их расчета имеют вид:

Откорректированные значения горизонтальных составляющих , абсолютной линейной скорости могут быть использованы в качестве входных параметров при реализации алгоритма автономного инерциального счисления географических координат местоположения ϕ, λ и угла χ азимутальной ориентации ГП.
Процедура коррекции счисленных значений географических координат  ,
,  и угла
и угла  является одним из частных способов общей процедуры коррекции ИНС по измерениям ДИСС.
является одним из частных способов общей процедуры коррекции ИНС по измерениям ДИСС.
Приведем его математическую суть.
Следует отметить, что методологической основой предлагаемого способа коррекции координат является кинематическая взаимосвязь текущих значений ошибок автономно счисляемых координат Δϕ, Δλ, Δχ с текущими погрешностями αх, αy выдерживания вертикали и углом αz азимутального ухода гироплатформы ИНС. Выражения, отражающие эту связь имеют вид (28).
Положим, что счисленные значения координат  ,
,  ,
,  определяются выражениями вида:
определяются выражениями вида:

где ϕ, λ, χ - идеальные значения рассматриваемых координат, а Δϕ, Δλ, Δχ - ошибки автономного счисления.
Очевидно, что располагая текущими значениями оценок , , углов рассогласования реального и опорного трехгранников ГП в соответствии с 1-ым выражением системы (28) может быть сформирована оценка  ошибки счисления географической широты
ошибки счисления географической широты  :
:

зная которую на рассматриваемом такте вычисления может быть вычислено откорректированное значение широты  :
:

На этом же такте, располагая уже откорректированной широтой , в соответствии со 2-ым выражением системы (28) вычисляют оценку  ошибки счисления географической долготы :
ошибки счисления географической долготы :

и на этом же такте рассчитывают откорректированное значение долготы  :
:

И наконец, зная текущую оценку  малого угла αz и рассчитанное выше значение оценки , в соответствии с 3-им выражением системы (29) вычисляют текущее значение оценки
малого угла αz и рассчитанное выше значение оценки , в соответствии с 3-им выражением системы (29) вычисляют текущее значение оценки  .
.

и на этом же такте рассчитывают откорректированное значение угла 

На втором и последующем такте вычислений приведенная выше процедура повторяется, но при этом используется уже откорректированная на первом/ предыдущем такте вычисления значение и новые - спрогнозированные значения оценок малых углов , , .
Представленная выше процедура расчета реализуется на протяжении всего интервала долгосрочного прогноза, при котором на каждом такте прогноза вычисляются текущие - спрогнозированные значения оценок , , и рассчитываются текущие значения откорректированных координат местоположения ,  и угла
и угла  азимутальной ориентации ГП.
азимутальной ориентации ГП.
Для выполнения одного из требований ИКАО, заключающегося в необходимости выдачи на индикацию пилоту и для управления в САУ абсолютно достоверной информации об углах эволюции объекта и, в первую очередь, такой, как углы крена γ, тангажа  и гироскопического курса ψг, ставит разработчиков НК и ОЭПрНК перед необходимостью реализации высоконадежного и эффективного метода комплексной обработки информации (КОИ) с установленных на борту зарезервированных инерциальных датчиков, типа ИНС по измерениям таких систем, как ДИСС или СНС, который бы обеспечивал решение указанной задачи. Суть этого метода заключается в том, что полученные в процессе КОИ оценки углов , , , определяющие ориентацию реальной/виртуальной ГП ИНС относительно ее опорного трехгранника, позволяют достаточно просто и с высокой точностью определить оценки текущих погрешностей
и гироскопического курса ψг, ставит разработчиков НК и ОЭПрНК перед необходимостью реализации высоконадежного и эффективного метода комплексной обработки информации (КОИ) с установленных на борту зарезервированных инерциальных датчиков, типа ИНС по измерениям таких систем, как ДИСС или СНС, который бы обеспечивал решение указанной задачи. Суть этого метода заключается в том, что полученные в процессе КОИ оценки углов , , , определяющие ориентацию реальной/виртуальной ГП ИНС относительно ее опорного трехгранника, позволяют достаточно просто и с высокой точностью определить оценки текущих погрешностей  ,
,  ,
,  измерения углов ориентации объекта
измерения углов ориентации объекта  ,
,  ,
,  .
.
Указанная процедура легко реализуется на основе известных кинематических соотношений, связывающих упомянутые выше погрешности  ,
,  ,
,  с малыми углами рассогласования реального и опорного трехгранников ИНС αх, αу, αz.
с малыми углами рассогласования реального и опорного трехгранников ИНС αх, αу, αz.
Эти соотношения больше известны, как выражения для расчета карданных ошибок и имеют вид:

Положим, что измеренные значения углов эволюции объекта, , , равны:

где , , - идеальные значения рассматриваемых углов, а , , - ошибки их измерения.
Очевидно, что зная текущие значения оценок  ,
,  погрешностей выдерживания вертикали и угла
погрешностей выдерживания вертикали и угла  азимутального ухода ГП для основной и резервной ИНС, а также измеренные/откорректированные значения углов тангажа
азимутального ухода ГП для основной и резервной ИНС, а также измеренные/откорректированные значения углов тангажа  и гироскопического курса
и гироскопического курса  , в соответствии с (58), достаточно просто могут быть рассчитаны оценки , , ошибок измерения текущих углов эволюции объекта для основной и резервной ИНС.
, в соответствии с (58), достаточно просто могут быть рассчитаны оценки , , ошибок измерения текущих углов эволюции объекта для основной и резервной ИНС.
Находя для каждой из них сумму среднеквадратических значений рассматриваемых оценок  ,
,  ,
,  :
:

и определяя меньшую из них, выявляют таким образом наиболее точную ИНС, угловая информация с которой используется для пилотирования и управления.
Более того, измеренные текущие значения углов  ,
,  ,
,  эволюции объекта могут быть достаточно просто откорректированы по результатам проведенной комплексной обработки информации ИНС по измерениям ДИСС и последующего
эволюции объекта могут быть достаточно просто откорректированы по результатам проведенной комплексной обработки информации ИНС по измерениям ДИСС и последующего
долгосрочного прогноза полученных оценок. И в этом случае, очевидно, вопрос выявления наиболее точного инерциального датчика может быть снят.
Приведем подробное математическое содержание упомянутой процедуры коррекции. Качественно, она ничем не отличается от приведенной выше процедуры коррекции основных навигационных параметров , , .
Действительно, как уже отмечено выше, зная текущие значения спрогнозированных оценок малых углов , , , в соответствии с первым выражением (49), определяют оценку  ошибки измерения угла тангажа:
ошибки измерения угла тангажа:

зная которую на рассматриваемом такте вычисления может быть рассчитано откорректированное значение угла тангажа  :
:

На этом же такте, зная уже откорректированное значение тангажа , в соответствии со 2-ым соотношением системы (58), определяют оценку  ошибки измерения угла крена
ошибки измерения угла крена  :
:

и сразу же, на этом такте вычисляют откорректированное значение крена :

И последние операции рассматриваемого такта связаны с коррекцией гироскопического курса  .
.
В соответствии с 3-им соотношением системы (58), определяют оценку  , ошибки измерения :
, ошибки измерения :

после чего рассчитывают откорректированное значение угла  :
:

Используя откорректированные значения  (57) и
(57) и  (66) формируют откорректированный истинный курс
(66) формируют откорректированный истинный курс  :
:

На втором и последующем такте прогноза оценок , , и коррекции рассматриваемых углов приведенная выше процедура повторяется, но при этом используется новые - спрогнозированные значения оценок , , малых углов αх, αу, αz рассогласования реального и опорного трехгранников ГП.
Приведенная выше математическая процедура коррекции измеренных углов эволюции объекта особенно важна в случае высокоманевренного полета при большом диапазоне изменения рассматриваемых углов.
Заявляемый способ реализуется следующим образом:
1. Оптимальное оценивание ошибок инерциальной информации осуществляют на основе использования классической дискретной процедуры оптимальной фильтрации и идентификации Калмана и в соответствии с традиционной для рассматриваемых режимов оценивания математической моделью ошибок ИНС.
2. Входные сигналы оптимального фильтра-идентификатора формируют путем сравнения одноименных горизонтальных составляющих абсолютной линейной скорости, измеренных ИНС и сформированных по измерениям ДИСС.
3. Оценивание ошибок инерциальной информации методически организуют таким образом, что после 270-ти секунд прямолинейного горизонтального полета, на котором реализуют точное «горизонтирование» с оцениванием хорошо наблюдаемых параметров горизонтальных каналов, осуществляют высокодинамичный маневр, типа «змейки», координированного или боевого разворотов, на котором оценивают слабонаблюдаемые параметры ИНС, типа азимутального ухода αz ее ГП и нескомпенсированного дрейфа εу гироскопа продольного канала.
4. По окончании маневра активную фазу оптимальной фильтрации и идентификации приостанавливают и фильтр-идентификатор переводят в режим долгосрочного - до следующего сеанса оптимального оценивания, прогноза полученных оценок.
5. Для его реализации сигналы измерения и оптимальные коэффициенты усиления фильтра-идентификатора обнуляют, а значения оценок на момент завершения активной фазы оптимального оценивания используют в качестве начальных условий в процедуре прогноза.
6. При этом прогноз осуществляют в соответствии с дискретными уравнениями, используемыми в процедуре оптимального оценивания для расчета априорных оценок.
7. Коррекцию выходных параметров ИНС - горизонтальных составляющих абсолютной линейной скорости реализуют в разомкнутом контуре, для чего используют текущие спрогнозированные значения оценок ошибок  ,
,  по скорости, оценки , , углов рассогласования реального и опорного трехгранников ГП ИНС и измеренные/рассчитанные составляющие
по скорости, оценки , , углов рассогласования реального и опорного трехгранников ГП ИНС и измеренные/рассчитанные составляющие  ,
,  абсолютной линейной скорости.
абсолютной линейной скорости.
Для достижения заявленного технического результата дополнительно осуществляют:
8. Традиционную, разработанную для рассматриваемого режима коррекции модель ошибок ИНС, расширяют за счет включения в нее математического описания координат ее местоположения относительно ДИСС и представляют ее в виде системы трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси опорного трехгранника ГП ИНС, которые одновременно описывают аддитивно входящие в сигналы измерения составляющие кинематической скорости ИНС. Обоснование необходимости расширения модели ошибок ИНС и вывод дифференциальных уравнений ее относительного движения приведен в разделе осуществления изобретения и представлен выражениями (1)÷(10), а сами уравнения - выражениями (11)÷(12).
При этом вывод выражения для расчета составляющих  ,
,  ,
,  относительной угловой скорости объекта, которые являются входными параметрами дифференциальных уравнений (11), (12), представлен выражениями (13)÷(26), а конечные выражения для их расчета - выражениями (13), (14), (26).
относительной угловой скорости объекта, которые являются входными параметрами дифференциальных уравнений (11), (12), представлен выражениями (13)÷(26), а конечные выражения для их расчета - выражениями (13), (14), (26).
9. При формировании входных сигналов оптимального фильтра-идентификатора и матрицы наблюдения используют кинематические соотношения (28), связывающие ошибки  ,
,  ,
,  измерения углов эволюции объекта и ошибки Δϕ, Δλ, Δχ счисления географических координат местоположения и угла азимутальной ориентации опорного трехгранника ГП ИНС с погрешностями выдерживания вертикали αх, αу и углом αz азимутального ухода ее ГП, чем, с точностью до величин второго порядка малости относительно αх, αу, αz, Δλ, обеспечивают определение всех элементов матрицы наблюдения и эффективное по точности и быстродействию оценивание и последующий долгосрочный прогноз таких параметров состояния ИНС, как
измерения углов эволюции объекта и ошибки Δϕ, Δλ, Δχ счисления географических координат местоположения и угла азимутальной ориентации опорного трехгранника ГП ИНС с погрешностями выдерживания вертикали αх, αу и углом αz азимутального ухода ее ГП, чем, с точностью до величин второго порядка малости относительно αх, αу, αz, Δλ, обеспечивают определение всех элементов матрицы наблюдения и эффективное по точности и быстродействию оценивание и последующий долгосрочный прогноз таких параметров состояния ИНС, как  ,
,  , αх, αу, αz, εх, εy, εz, Δξ, Δη, Δζ. Подробное описание процедуры формирования скоростных уравнений связи (43) и получения на их основе выражений для расчета входных сигналов оптимального фильтра-идентификатора (44) и матрицы наблюдения (48), представлено в соответствующем подразделе осуществления изобретения, включающем их обоснование и подробный вывод.
, αх, αу, αz, εх, εy, εz, Δξ, Δη, Δζ. Подробное описание процедуры формирования скоростных уравнений связи (43) и получения на их основе выражений для расчета входных сигналов оптимального фильтра-идентификатора (44) и матрицы наблюдения (48), представлено в соответствующем подразделе осуществления изобретения, включающем их обоснование и подробный вывод.
10. Коррекцию счисленных инерциальной системой географических координат местоположения  ,
,  и угла
и угла  азимутальной ориентации опорного трехгранника ГП ИНС реализуют, используя текущие спрогнозированные значения оценок малых углов , , рассогласования реального и опорного трехгранников ГП ИНС и счисленные/откорректированные значения географической широты
азимутальной ориентации опорного трехгранника ГП ИНС реализуют, используя текущие спрогнозированные значения оценок малых углов , , рассогласования реального и опорного трехгранников ГП ИНС и счисленные/откорректированные значения географической широты  и угла
и угла  азимутальной ориентации опорного трехгранника ГП ИНС, а саму коррекцию осуществляют в соответствии с кинематическими соотношениями связи ошибок счисления основной тройки навигационных параметров Δϕ, Δλ, Δχ с малыми углами αх, αу, αz текущего ухода реальной ГП ИНС (28).
азимутальной ориентации опорного трехгранника ГП ИНС, а саму коррекцию осуществляют в соответствии с кинематическими соотношениями связи ошибок счисления основной тройки навигационных параметров Δϕ, Δλ, Δχ с малыми углами αх, αу, αz текущего ухода реальной ГП ИНС (28).
11. Для чего, в соответствии с (28), последовательно формируют оценки ошибок  ,
,  ,
,  счисления основных навигационных параметров и последовательно корректируют счисленные значения географических координат , местоположения объекта и истинного курса
счисления основных навигационных параметров и последовательно корректируют счисленные значения географических координат , местоположения объекта и истинного курса  ориентации опорного трехгранника ГП ИНС. Рекомендуемая последовательность вычислений представлена выражениями (50)÷(56)и подкреплена их соответствующим описанием. Приведенную процедуру реализуют на всем интервале долгосрочного прогноза и коррекции. Ожидаемая длительность режима долгосрочного прогноза составляет не менее 40-ка минут.
ориентации опорного трехгранника ГП ИНС. Рекомендуемая последовательность вычислений представлена выражениями (50)÷(56)и подкреплена их соответствующим описанием. Приведенную процедуру реализуют на всем интервале долгосрочного прогноза и коррекции. Ожидаемая длительность режима долгосрочного прогноза составляет не менее 40-ка минут.
12. Для определения из двух потенциально равноточных ИНС той, угловая информация которой наиболее приемлема для пилотирования и режима боевых и специальных задач, а также для коррекции текущих значений углов тангажа  , крена
, крена  и гироскопического курса
и гироскопического курса  , используют текущие спрогнозированные значения оценок малых углов , , , рассогласования реального и опорного трехгранников ГП ИНС и измеренные/откорректированные значения углов тангажа
, используют текущие спрогнозированные значения оценок малых углов , , , рассогласования реального и опорного трехгранников ГП ИНС и измеренные/откорректированные значения углов тангажа  и гироскопического курса
и гироскопического курса  соответствии с кинематическими соотношениями связи ошибок
соответствии с кинематическими соотношениями связи ошибок  ,
,  ,
,  измерения углов ориентации объекта с малыми углами αх, αу, αz текущего ухода реальной ГП ИНС (56)последовательно для каждой ИНС формируют текущие значения оценок ошибок
измерения углов ориентации объекта с малыми углами αх, αу, αz текущего ухода реальной ГП ИНС (56)последовательно для каждой ИНС формируют текущие значения оценок ошибок  ,
,  ,
,  углов ориентации объекта, после чего рассчитывают текущие значения сумм их квадратов
углов ориентации объекта, после чего рассчитывают текущие значения сумм их квадратов  и посредством сравнения выявляют минимальную из них, и тем самым определяют наиболее приемлемую из них для решения упомянутых задач.
и посредством сравнения выявляют минимальную из них, и тем самым определяют наиболее приемлемую из них для решения упомянутых задач.
13. Коррекцию измеренных углов  ,
,  ,
,  эволюции объекта реализуют в соответствии с последовательно рассчитанными значениями оценок , , ошибок измерения соответствующих углов , , и их коррекции по принципу «рассчитал-откорректировал».
эволюции объекта реализуют в соответствии с последовательно рассчитанными значениями оценок , , ошибок измерения соответствующих углов , , и их коррекции по принципу «рассчитал-откорректировал».
Приведенная процедура коррекции углов эволюции объекта приведена в заключительной части раздела осуществления изобретения и представлена выражениями (61)÷(66).
14. Коррекцию истинного курса объекта осуществляют в соответствии с определением угла χ азимутальной ориентации опорного трехгранника ГП ИНС, и измеряемого ею гироскопического курса ψг. Для расчета откорректированного значения истинного курса используют откорректированные значения  (56)и
(56)и  (66), а само значение истинного курса
(66), а само значение истинного курса  рассчитывают как сумму
рассчитывают как сумму  (67).
(67).
Из представленного описания заявляемого способа оценивания ошибок инерциальной информации ИНС и ее коррекции по измерениям доплеровского измерителя скорости следует, что технический результат изобретения достигнут.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2617565C1 |
| ЗАЩИЩЕННЫЙ СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ | 2019 |
|
RU2713584C1 |
| СПОСОБ ФОРМИРОВАНИЯ ВОЗДУШНО-СКОРОСТНЫХ ПАРАМЕТРОВ МАНЕВРЕННОГО ОБЪЕКТА | 2019 |
|
RU2713585C1 |
| СПОСОБ ФОРМИРОВАНИЯ БАРОИНЕРЦИАЛЬНОЙ ВЫСОТЫ И ВЕРТИКАЛЬНОЙ СКОРОСТИ | 2019 |
|
RU2713583C1 |
| СПОСОБ ОПТИМАЛЬНОГО ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ И ЕЁ КОРРЕКЦИИ ПО НЕПОДВИЖНОМУ НАЗЕМНОМУ ОРИЕНТИРУ С ИЗВЕСТНЫМИ ГЕОГРАФИЧЕСКИМИ КООРДИНАТАМИ | 2019 |
|
RU2713582C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ И ПРОГНОЗА ЕЁ ПАРАМЕТРОВ НА ОСНОВЕ МОДИФИЦИРОВАННОЙ, ИНВАРИАНТНОЙ К РЕЛЬЕФУ ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ УГЛОМЕСТНОЙ ПРОЦЕДУРЫ РАСЧЁТА ДАЛЬНОСТИ | 2016 |
|
RU2617373C1 |
| СПОСОБ ОПТИМАЛЬНОЙ ПРИВЯЗКИ К ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ И ПРОГНОЗА ЕЁ ПАРАМЕТРОВ НА ОСНОВЕ СУБОПТИМАЛЬНОЙ ПРОЦЕДУРЫ УГЛОВОГО СОПРОВОЖДЕНИЯ | 2016 |
|
RU2621374C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО ПРИЦЕЛИВАНИЯ ПО ПОДВИЖНОЙ НАЗЕМНОЙ ЦЕЛИ | 2016 |
|
RU2629130C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2011 |
|
RU2463560C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОШИБОК БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ПО ВНЕШНЕЙ ПОЗИЦИОННОЙ И СКОРОСТНОЙ ИНФОРМАЦИИ | 2017 |
|
RU2668658C1 |
Изобретение относится к области комплексных навигационных систем, систем управления и наведения летательных аппаратов (ЛА). Технический результат – расширение функциональных возможностей. Указанный результат достигается за счет: - расширения традиционной модели ошибок инерциальной навигационной системы (ИНС) и включения в нее системы из трех взаимосвязанных дифференциальных уравнений 1-го порядка, описывающих изменение координат местоположения ИНС относительно доплеровского измерителя скорости (ДИСС) в проекциях на оси опорного трехгранника гироплатформы (ГП); - корректного формирования сигналов измерения, матрицы наблюдения и модели сообщения с использованием соотношений, связывающих ошибки счисления основной тройки навигационных параметров с малыми углами рассогласования реального и опорного трехгранников ГП ИНС. Высокая точность оценивания скоростных ошибок и углов ухода реальной ГП ИНС позволяет реализовать эффективную коррекцию навигационной и пилотажной информации и из двух потенциально равноточных ИНС определить ту, угловая информация которой наиболее приемлема для пилотирования и решения боевых и специальных задач. 4 ил.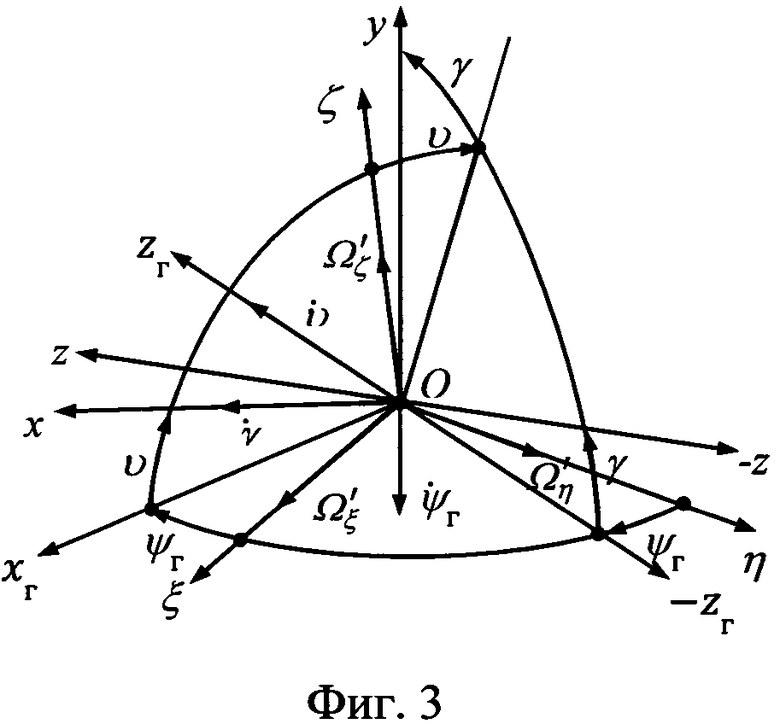
Способ оценивания ошибок инерциальной информации и ее коррекции по измерениям доплеровского измерителя скорости (ДИСС), включающий использование классической дискретной процедуры оптимальной фильтрации и идентификации Калмана, для чего входные сигналы оптимального фильтра-идентификатора формируют путем сравнения одноименных горизонтальных составляющих абсолютной линейной скорости, измеренных инерциальной навигационной системой (ИНС) и сформированных по измерениям ДИСС, а его структуру синтезируют в соответствии с традиционной для ИНС моделью ошибок, при этом характер полета методически организуют таким образом, что после 270-ти секунд горизонтального прямолинейного полета, на котором реализуют точное «горизонтирование» и оценивают хорошо наблюдаемые параметры горизонтальных каналов ИНС, осуществляют маневр типа «змейки», координированного или боевого разворотов, после чего активную фазу процедуры оптимальной фильтрации и идентификации приостанавливают и фильтр-идентификатор переводят в режим долгосрочного, до следующего сеанса коррекции, прогноза, для реализации которого сигналы измерения и оптимальные коэффициенты усиления фильтра-идентификатора обнуляют, а значения оценок на момент завершения активной фазы процедуры оценивания используют в качестве начальных условий в процедуре прогноза, при этом прогноз осуществляют в соответствии с дискретными уравнениями для расчета априорных оценок ошибок ИНС, а коррекцию выходных параметров ИНС реализуют в разомкнутом контуре, для чего используют текущие прогнозируемые значения оценок, отличающийся тем, что разработанную для рассматриваемого режима коррекции модель ошибок ИНС расширяют за счет включения в нее математического описания координат ее местоположения (размещения) относительно ДИСС и представляют его в виде системы из трех взаимосвязанных дифференциальных уравнений первого порядка в проекциях на оси опорного трехгранника гироплатформы (ГП) ИНС, которые одновременно описывают аддитивно входящие в сигналы измерения составляющие кинематической скорости ИНС относительно ДИСС, и дополнительно при формировании сигналов измерения и матрицы наблюдения используют кинематические соотношения, связывающие ошибки Δϕ, Δλ, Δχ счисления географических координат местоположения и угла азимутальной ориентации опорного трехгранника ГП ИНС, а также ошибки Δϑ, Δγ, Δψг измерения углов эволюции объекта с погрешностями выдерживания вертикали αх, αу и углом αz азимутального ухода ГП, которые с точностью до величин второго порядка малости относительно малых величин αх, αу, αz, Δλ определяют все элементы матрицы наблюдения, чем обеспечивают точное и эффективное оценивание и прогноз таких ошибок автономного инерциального счисления, как ΔVx, ΔVy αх, αy, αz, Δξ, Δη, Δζ, при этом коррекцию счисленных инерциальной системой географических координат местоположения и угла азимутальной ориентации опорного трехгранника ее ГП реализуют, используя текущие спрогнозированные значения оценок малых углов  ,
,  ,
,  рассогласования реального и опорного трехгранников ГП ИНС и счисленные/откорректированные значения географической широты
рассогласования реального и опорного трехгранников ГП ИНС и счисленные/откорректированные значения географической широты  и угла
и угла  азимутальной ориентации опорного трехгранника ГП ИНС и в соответствии с кинематическими соотношениями связи Δϕ, Δλ, Δχ с малыми углами αх, αy, αz текущего ухода реальной ГП ИНС последовательно формируют оценки ошибок
азимутальной ориентации опорного трехгранника ГП ИНС и в соответствии с кинематическими соотношениями связи Δϕ, Δλ, Δχ с малыми углами αх, αy, αz текущего ухода реальной ГП ИНС последовательно формируют оценки ошибок  ,
,  ,
,  счисления основных навигационных параметров и последовательно корректируют счисленные значения географических координат
счисления основных навигационных параметров и последовательно корректируют счисленные значения географических координат  ,
,  местоположения и истинного курса ориентации опорного трехгранника
местоположения и истинного курса ориентации опорного трехгранника  ГП ИНС, а для выявления из двух потенциально равноточных ИНС той, угловая информация которой наиболее приемлема для пилотирования и решения боевых и специальных задач, а также для коррекции текущих значений углов тангажа
ГП ИНС, а для выявления из двух потенциально равноточных ИНС той, угловая информация которой наиболее приемлема для пилотирования и решения боевых и специальных задач, а также для коррекции текущих значений углов тангажа  , крена
, крена  и гироскопического курса
и гироскопического курса  используют текущие спрогнозированные значения оценок малых углов
используют текущие спрогнозированные значения оценок малых углов  ,
,  ,
,  рассогласования реального и опорного трехгранников ГП ИНС и измеренные/откорректированные значения углов тангажа
рассогласования реального и опорного трехгранников ГП ИНС и измеренные/откорректированные значения углов тангажа  и гироскопического курса
и гироскопического курса  и в соответствии с кинематическими соотношениями связи ошибок Δϑ, Δγ, Δψг
и в соответствии с кинематическими соотношениями связи ошибок Δϑ, Δγ, Δψг
измерения углов ориентации объекта с малыми углами αх, αy, αz текущего ухода реальной ГП ИНС последовательно для каждой ИНС формируют текущие значения оценок ошибок измерения углов ориентации объекта  ,
,  ,
,  и рассчитывают текущие значения сумм их квадратов
и рассчитывают текущие значения сумм их квадратов 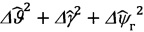 , посредством сравнения которых выявляют минимальную из них и тем самым определяют наиболее приемлемую для решения обозначенных задач ИНС, а при необходимости последовательно корректируют измеренные значения углов тангажа
, посредством сравнения которых выявляют минимальную из них и тем самым определяют наиболее приемлемую для решения обозначенных задач ИНС, а при необходимости последовательно корректируют измеренные значения углов тангажа  , крена
, крена  и гироскопического курса
и гироскопического курса  в соответствии с последовательно рассчитанными значениями оценок
в соответствии с последовательно рассчитанными значениями оценок  ,
,  ,
,  и коррекцией измеренных углов эволюции объекта по принципу «рассчитал-откорректировал», при этом откорректированное значение истинного курса объекта
и коррекцией измеренных углов эволюции объекта по принципу «рассчитал-откорректировал», при этом откорректированное значение истинного курса объекта  определяют, как сумму оценок
определяют, как сумму оценок  и
и  .
.
| ЛИПТОН А | |||
| Выставка инерциальных систем на подвижном основании | |||
| Дополнение к задаче выставки на подвижном основании/ Л.Г | |||
| КЛИБАНОВ, В.Л | |||
| ЛЕОНИДОВ | |||
| - М.: Наука, 1971 | |||
| Устройство для устранения мешающего действия зажигательной электрической системы двигателей внутреннего сгорания на радиоприем | 1922 |
|
SU52A1 |
| ОЦЕНКА ДОПЛЕРОВСКОГО РАЗБРОСА/СКОРОСТИ В МОБИЛЬНЫХ УСТРОЙСТВАХ БЕСПРОВОДНОЙ СВЯЗИ И СПОСОБЫ ЭТОЙ ОЦЕНКИ | 2002 |
|
RU2269206C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ МНОГОСЕКТОРНОЙ ОЦЕНКИ СКОРОСТИ И ДОПЛЕРОВСКОГО СДВИГА ПОДВИЖНОЙ СТАНЦИИ СИСТЕМ СИНХРОННОЙ СВЯЗИ | 2009 |
|
RU2451949C1 |
| СПОСОБ ПОВЕРКИ ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ ТЕЧЕНИЙ | 2014 |
|
RU2562001C1 |
| БОТУЗ С.П | |||
| Автоматизация исследования, разработки и патентования позиционных систем программного управления | |||
| - М.: Наука | |||
| Физматлит, 1999 | |||
| Переносная мусоросжигательная печь-снеготаялка | 1920 |
|
SU183A1 |

