Изобретение относится к звуколокационным системам с отражением ультразвуковых волн и может быть использовано при ориентации человека в условиях плохой видимости или для слепых.
Известен способ ультразвуковой (УЗ) локации для слепых, при котором периодически излучают УЗ сигнал, принимают эхосигнал, отраженный от объекта, и определяют временной интервал между зондирующим и отраженным УЗ сигналами, в зависимости от которого изменяют частоту следования зондирующих УЗ сигналов. Кроме того, пространство локации разделено на две зоны (ближнюю и дальнюю), в соответствии с которыми используют две тональности формируемых звуковых импульсов. Недостаток способа - низкая точность определения дальности объекта из-за низкой различимости изменения параметров звукового сигнала с уменьшением расстояния до объекта.
Наиболее близким к предлагаемому по технической сущности является способ УЗ локации для слепых, при котором в направлении обзора периодически излучают УЗ сигнал, принимают отраженный от объекта сигнал, определяют интервал времени между зондирующим и отраженным УЗ сигналами, пропорциональный расстоянию до объекта, и формируют звуковой сигнал, тональность (частота звуковых колебаний) которого зависит от указанного временного интервала. По тональности определяют расстояние до объекта.
Недостаток известного способа - низкая точность определения дальности объекта, обусловленная тем, что для информации о расстоянии до объекта используется только один параметр звукового сигнала - тональность, причем в условиях случайно меняющейся (с изменением частоты) громкости звука, что дополнительно снижает разрешающую способность локации до дальности.
Целью изобретения является повышение точности определения расстояния до объекта.
Указанная цель достигается тем, что в способе ультразвуковой локации в условиях плохой видимости, преимущественно для слепых, заключающемся в том, что периодически излучают ультразвуковой сигнал в направлении обзора, принимают отраженный от объекта сигнал, определяют интервал времени между зондирующим и отраженным УЗ сигналами, пропорциональный расстоянию до объекта, и формируют звуковой сигнал с тональностью, зависящей от указанного временного интервала, по которой определяют расстояние до объекта, частоту звуковых колебаний выбирают обратно пропорциональной интервалу времени между зондирующим и отраженным УЗ сигналами, а частоту звуковых колебаний, соответствующую минимальному лоцируемому расстоянию, выбирают из интервала частот, соответствующего низкочастотному минимуму интенсивности звука при заданном уровне громкости.
Цель достигается также тем, что частоту звуковых колебаний, соответствующую минимальному лоцируемому расстоянию, выбирают из интервала частот 500-800 Гц при уровне громкости 42-52 фона.
Кроме того, длительность звукового сигнала выбирают не менее 80 мс, причем преимущественно звуковой сигнал формируют в течение промежутка времени между отраженным УЗ сигналом и следующим за ним зондирующим сигналом.
Повышение точности определения расстояния до объекта в предлагаемом способе локации достигается за счет того, что выбором необходимого диапазона изменения частоты звуковых колебаний автоматически обеспечивается монотонное увеличение громкости звука наряду с изменением его тональности. При этом рост частоты звука и увеличение его громкости по мере приближения объекта обеспечивает оптимальное (с точки зрения объективной оценки по звуку расстояния до препятствия) воздействие на слух человека, особенно в ближней зоне. Кроме того, выбор интервала звуковых колебаний от низких (десятки Гц) частот до 500-800 Гц обеспечивает однозначное и достаточно различимое изменение как уровня интенсивности, так и тональности звука при оптимальном уровне громкости, лежащем в интервале 42-52 фона.
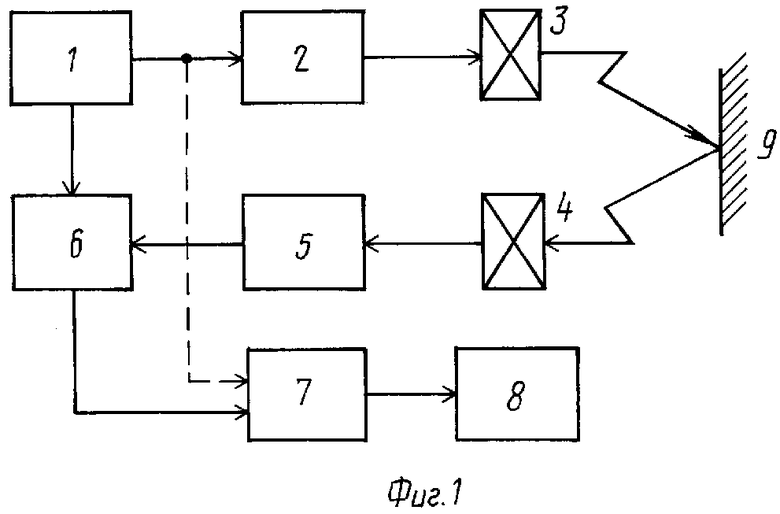
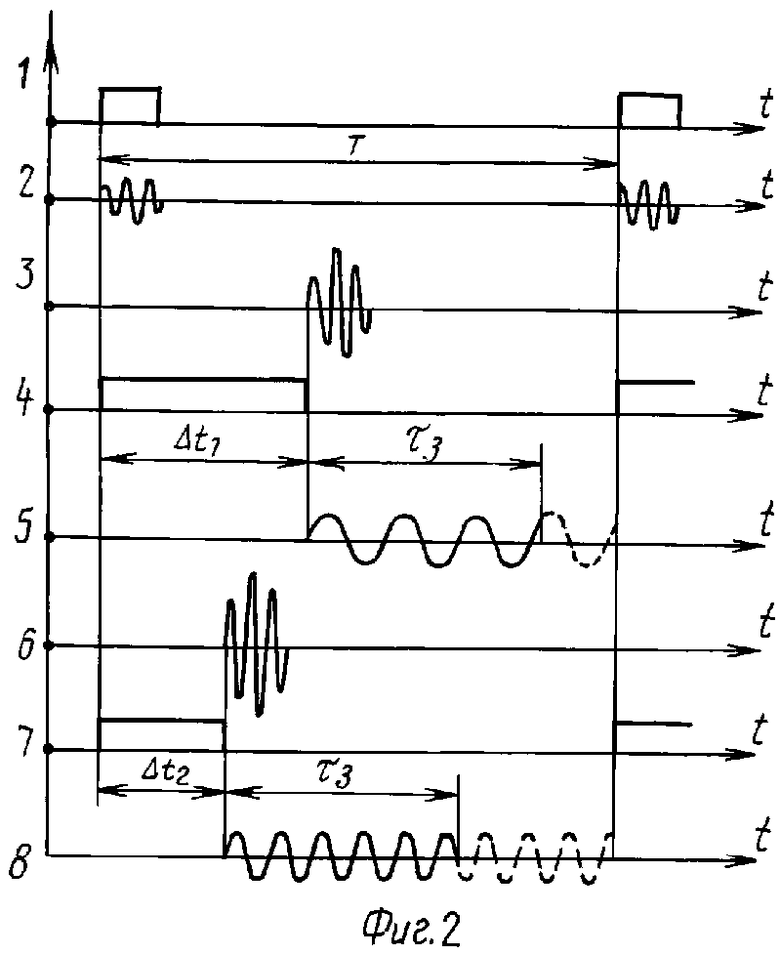
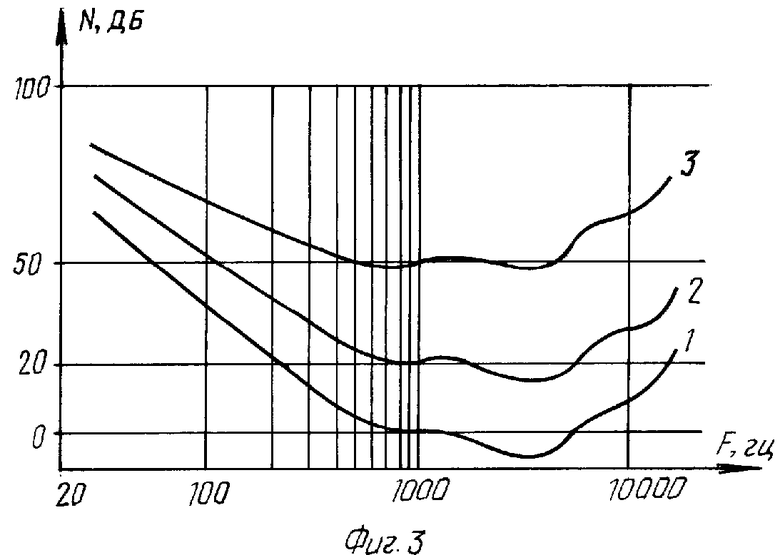
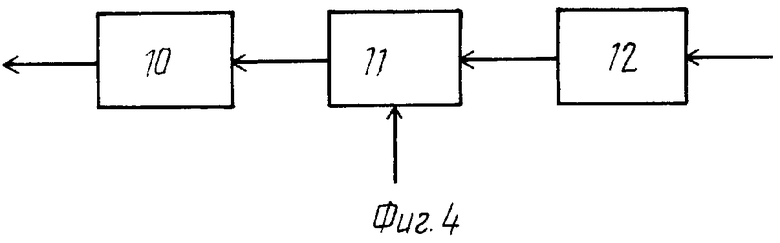
На фиг. 1 показана структурная схема устройства УЗ локации; на фиг. 2 - временная диаграмма работы устройства; на фиг. 3 - зависимость уровня интенсивности звука N от частоты F звуковых колебаний при различных уровнях громкости Н; на фиг. 4 - структурная схема преобразователя временных интервалов в напряжение.
Устройство УЗ локации (фиг. 1) содержит генератор 1 тактовых импульсов, генератор 2 зондирующих импульсов, передающий 3 и принимающий 4 акустические преобразователи, усилитель 5, преобразователь 6 временных интервалов в напряжение, генератор 7 звуковой частоты, звуковой индикатор 8 и источник питания (на фиг. 1 не показан). Один из выходов (первый) генератора 1 тактовых импульсов соединен со входом генератора 2 зондирующих импульсов, а второй выход - с первым входом преобразователя 6 временных интервалов в напряжение. Выход генератора 2 соединен с передающим акустическим преобразователем 3. Выход принимающего акустического преобразователя 4 соединен с усилителем 5, а выход последнего - со вторым входом преобразователя 6. Выход последнего соединен со входом генератора 7 звуковой частоты, выход которого соединен со звуковым индикатором 8, сигнализирующим о расстоянии до объекта 9. Первый выход генератора 1 тактовых импульсов может быть соединен с дополнительным входом генератора 7 звуковой частоты, как показано пунктиром на фиг. 1.
Преобразователь 6 временных интервалов в напряжение (фиг. 4) состоит из генератора 10 счетных импульсов, счетчика 11 и цифроаналогового преобразователя (ЦАП) 12. Вход генератора 10 счетных импульсов соединен с выходом генератора 1 тактовых импульсов, а выход - со входом счетчика 11. Управляющий вход счетчика соединен с усилителем 5, а выход счетчика - со входом ЦАП 12. Выход ЦАП соединен с управляющим входом звукового генератора 7.
Способ УЗ локации заключается в следующем.
С помощью генератора 1 тактовых импульсов и генератора 2 зондирующих УЗ импульсов создают короткие УЗ сигналы с периодом повторения Т (эпюры 1 и 2 на фиг. 2), которые с помощью передающего акустического преобразователя 3 излучаются в направлении обзора. Период Т выбирают не менее времени прохождения УЗ сигналом двойного максимального лоцируемого расстояния. Одновременно с генератора 1 подается сигнал на первый вход преобразователя 6 временных интервалов в напряжение.
Отраженный от объекта (препятствия) 9 УЗ сигнал (эпюра 3 на фиг. 2) поступает на приемный акустический преобразователь 4 и через усилитель 5 - на второй вход преобразователя 6 временных интервалов. Напряжение с выхода преобразователя 6 поступает на вход генератора 7 звуковых колебаний, частота F на выходе которого обратно пропорциональна интервалу времени между зондирующим и отраженным УЗ сигналами, т. е. расстоянию до объекта. Звуковой сигнал, формируемый генератором 7, подается на звуковой индикатор 8. На фиг. 2 временному интервалу Δ t1 (эпюра 4) соответствует звуковой сигнал (длительность τ3) на эпюре 5, а более близкому расстоянию того же объекта соответствуют эпюры 6 (эхоимпульс), 7 (временной интервал Δ t2) и 8 (звуковой сигнал).
Зависимость частоты звуковых колебаний от интервала времени между зондирующим и отраженным УЗ сигналами и частота, соответствующая минимальному лоцируемому расстоянию, выбирается из следующих соображений. Как видно из фиг. 3, кривая I порога слышимости (уровень громкости Н= 0) свидетельствует о резком изменении уровня интенсивности звука в интервале частот от 20 до 1000 Гц, при этом минимум N наблюдается в интервале 3-3,5 кГц. Однако, при повышении уровня громкости (кривая равной громкости 2 соответствует Н = 20 фон, кривая 3 - Н = 50 фон) на характеристиках N(F) появляется второй минимум в области более низких частот. В частности, при уровнях громкости 43-52 фона (экспериментально определенный оптимальный диапазон Н с точки зрения комфортности, с одной стороны, и четкой различимости тональностей звука, с другой) второй минимум N лежит в интервале частот от 500 до 800 Гц. Если частоту, соответствующую минимальному лоцируемому расстоянию, выбрать из указанного интервала и считать ее максимальной (Fmax), а частоту звука при уменьшении расстояния до объекта изменять с низких значений (десятки Гц) до частоты Fmax, то при неизменной амплитуде сигнала на выходе звукового генератора будет автоматически происходить однозначное увеличение громкости звука, воспринимаемого человеком. Наряду с достаточно глубоким изменением тональности звучания это позволяет существенно повысить точность определения дальности объекта. Кроме того, звук в указанном диапазоне изменения частоты наиболее благоприятен с точки зрения комфортности восприятия.
Повышению разрешающей способности по дальности способствует также выбор оптимальной длительности τ3 , звукового сигнала. Экспериментальные исследования показали, что эта длительность должна быть не мене 80 мс. При меньшей длительности звуковые сигналы в области нижних частот (десятки Гц) становятся трудно различимыми по тональности и точность определения расстояния до объекта в дальней зоне понижается. Оптимальным по длительности звукового сигнала является время между отраженным УЗ сигналом и следующим за ним зондирующим УЗ сигналом (при минимальной длительности, не меньшей 80 мс). В этом случае наряду с четкой различимостью тональностей звука на любых расстояниях до объекта (в пределах между максимальным и минимальным лоцируемыми расстояниями) происходит также изменение скважности звуковых импульсов (интервал между импульсами с приближением объекта уменьшается), что является дополнительным информационным параметром звукового сигнала, позволяющим увеличить точность определения дальности объекта. Формирование звукового импульса генератором 7 (фиг. 1) в этом случае может производиться за счет начала генерации звуковых колебаний по сигналу от преобразователя 6, а выключение колебаний - по очередному тактовому импульсу с генератора 1 на дополнительный управляющий вход генератора 7 (пунктир на фиг. 1).
Преобразование интервала времени между зондирующим и отраженным УЗ сигналами в напряжение может быть осуществлено, например, с помощью устройства, изображенного на фиг. 4, которое работает следующим образом.
При срабатывании генератора тактовых импульсов (фиг. 1) запускается генератор 10 счетных импульсов и на счетный вход счетчика 11 начинают поступать счетные импульсы. С приходом эхосигнала, усиленного усилителем 5, на управляющий вход счетчика 11 счет импульсов прекращается и на его выходе устанавливается двоичный код, соответствующий числу счетных импульсов, т. е. вре менному интервалу между зондирующим и отраженным УЗ сигналами, пропорциональному расстоянию до объекта. С помощью ЦАП 12 двоичный код преобразуется в напряжение, управляющее частотой звукового генератора 7. При этом с ростом напряжения на входе генератора частота звуковых колебаний его увеличивается.
Предлагаемый способ УЗ локации может быть применен для ориентации людей и обнаружения препятствий в условиях плохой видимости (темное время суток, дым, туман и т. п. ), а также для слепых. Способ позволяет упростить аппаратуру для локации, поскольку изменение громкости звуковых колебаний с изменением расстояния до объекта происходит автоматически, без применения специальных электронных средств. (56) Авторское свидетельство СССР N 1043829, кл. А 61 F 9/08, 1983.
Авторское свидетельство СССР N 1313440, кл. А 61 F 9/18, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УЛЬТРАЗВУКОВОЙ ЛОКАЦИИ | 1991 |
|
RU2020519C1 |
| СПОСОБ АКУСТИЧЕСКОГО ПРЕДСТАВЛЕНИЯ ПРОСТРАНСТВЕННОЙ ИНФОРМАЦИИ ДЛЯ ИНВАЛИДОВ ПО ЗРЕНИЮ | 1993 |
|
RU2085162C1 |
| Ультразвуковой локатор для слепых | 1982 |
|
SU1053829A1 |
| Способ профилирования структуры донных осадков | 2023 |
|
RU2835813C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПЛОДА ПУТЕМ ПРОСЛУШИВАНИЯ ЕГО СЕРДЦЕБИЕНИЯ | 1995 |
|
RU2083159C1 |
| Устройство для ультразвукового измерения характеристик внутричерепной гемоликвородинамики | 1987 |
|
SU1507334A1 |
| УЛЬТРАЗВУКОВОЙ МИКРОСКОП | 2005 |
|
RU2270997C1 |
| Устройство для подземного акустического исследования | 1975 |
|
SU584269A1 |
| СПОСОБ УЛЬТРАЗВУКОВОГО ИЗМЕРЕНИЯ ПАРАМЕТРОВ ЖИДКОСТНОГО ПОТОКА | 2023 |
|
RU2830296C2 |
| СПОСОБ АКУСТИЧЕСКОГО ПРЕДСТАВЛЕНИЯ ПРОСТРАНСТВЕННОЙ ИНФОРМАЦИИ ДЛЯ ПОЛЬЗОВАТЕЛЕЙ | 2012 |
|
RU2523340C2 |
Изобретение относится к звуколокационным системам с отражением ультразвуковых волн и может быть использовано при ориентации человека в условиях плохой видимости или для слепых. Цель изобретения - повышение точности определения расстояния до объекта. Цель изобретения достигается тем, что периодически измеряют ультразвуковой сигнал в направлении обзора, принимают отраженный от объекта сигнал. Определяют интервал времени между зондирующим и отраженным сигналами, пропорциональный расстоянию до объекта, и формируют звуковой сигнал с частотой колебаний, обратно пропорциональный расстоянию до объекта. По этому сигналу судят о расстоянии до объекта. Частоту колебаний, соответствующую минимальному лоцируемому расстоянию, выбирают из интервала частот, соответствующего низкочастотному минимуму интенсивности звука при заданном уровне громкости, преимущественно из интервала частот 500 - 800 Гц при уровне громкости от 42 до 52 фон. Длительность звукового сигнала выбирают не менее 80 мс. 3 з. п ф-лы, 4 ил.
