Изобретение относится к звуколокационным системам с отражением ультразвуковых волн и может быть использовано при ориентации человека в условиях плохой видимости или для слепых.
Известен способ ультразвуковой локации для слепых, при котором периодически излучают ультразвуковой сигнал, принимают эхосигнал, отраженный от объекта, и определяют временной интервал между зондирующим и отраженным ультразвуковыми сигналами, в зависимости от которого изменяют частоту следования зондирующих ультразвуковых сигналов. Кроме того, пространство локации разделено на две зоны (ближнюю и дальнюю), в соответствии с которыми используют две тональности излучаемых звуковых импульсов. Недостаток способа - низкая точность определения дальности объекта из-за низкой различимости изменений параметров звукового сигнала с уменьшением расстояния до объекта, а также невозможность различения видов объектов.
Наиболее близким к предлагаемому по технической сущности является способ ультразвуковой локации для слепых, при котором в направлении обзора периодически излучают ультразвуковой сигнал, принимают отраженный от объекта сигнал, определяют интервал времени между зондирующим и отраженным ультразвуковыми сигналами, пропорциональный расстоянию до объекта, и формируют звуковой сигнал, тональность (частота формируемых звуковых колебаний) которого зависит от указанного временного интервала. По тональности определяют расстояние до объекта.
Недостаток известного способа - низкая разрешающая способность локации, обусловленная невозможностью различения типов объектов.
Целью изобретения является повышение разрешающей способности локации за счет различения типов объектов по их отражательной способности.
Цель достигается тем, что в способе ультразвуковой локации в условиях плохой видимости периодически излучают ультразвуковой сигнал в направлении обзора, принимают отраженный от объекта сигнал, определяют интервал времени между зондирующим и отраженным ультразвуковыми сигналами, пропорциональный расстоянию до объекта, и формируют звуковой сигнал с тональностью, зависящей от указанного временного интервала, по которой определяют расстояние до объекта, амплитуду отраженного ультразвукового сигнала сравнивают с пороговым уровнем, задаваемым в зависимости от коэффициента отражения поверхности лоцируемых объектов, звуковой сигнал начинают излучать с момента равенства амплитуды отраженного ультразвукового сигнала пороговому уровню и по начальному тону звукового сигнала определяют тип объекта.
Цель достигается также тем, что пороговый уровень выбирают равным амплитуде ультразвукового сигнала, отраженного от объекта с максимальным коэффициентом отражения, расположенного на максимальном лоцируемом расстоянии.
Сравнение амплитуды отраженного ультразвукового сигнала с пороговым уровнем, задаваемым при настройке аппаратуры в зависимости от коэффициента отражения поверхности объектов (в частности, равным амплитуде эхосигнала, отраженного от объекта с максимальным коэффициентом отражения, расположенного на максимальном лоцируемом расстоянии), позволяет различать тип объекта при локации за счет того, что объекты с различной отражательной способностью будут фиксироваться на различных расстояниях, что скажется на начальном тоне звукового сигнала (объекты с малым поглощением ультразвуковых колебаний вызовут начало звуковых колебаний на большем расстоянии от него, чем объекты с большим поглощением ультразвуковых колебаний), по которому и судят о типе объекта.
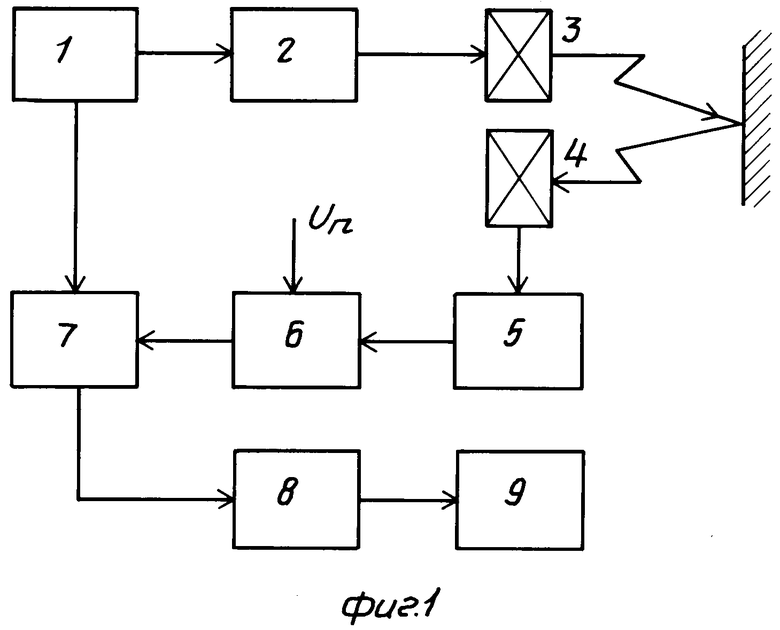
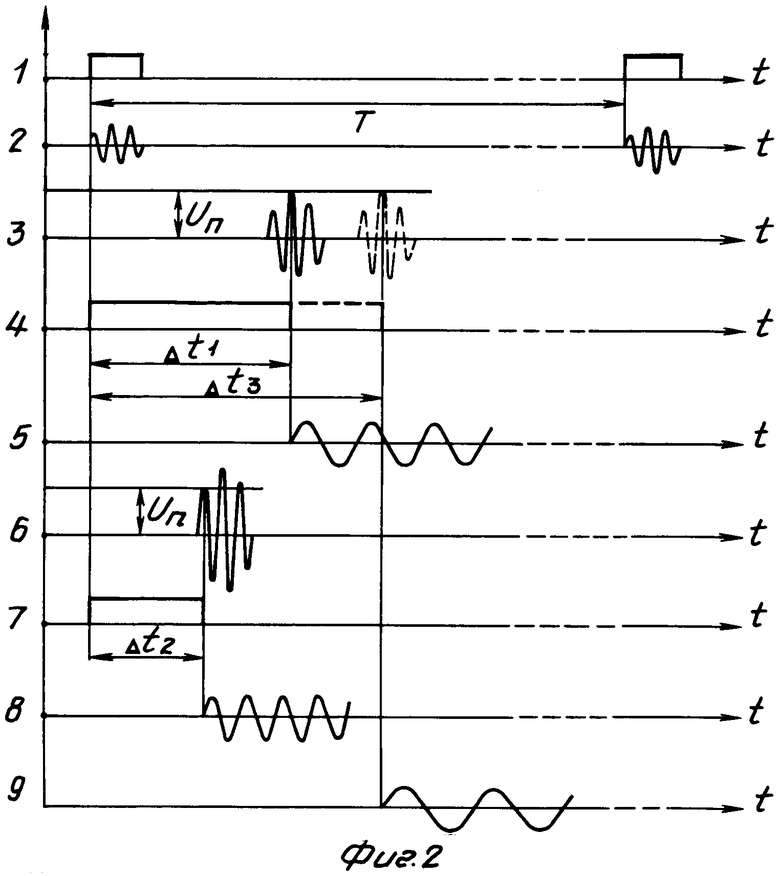
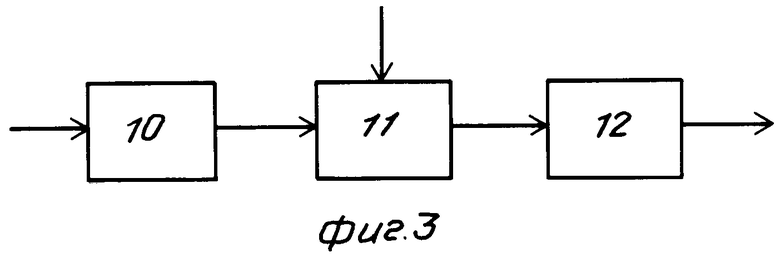
На фиг. 1 показана структурная схема устройства для ультразвуковой локации; на фиг. 2 - временная диаграмма работы устройства; на фиг. 3 - структурная схема преобразователя временных интервалов в напряжение.
Устройство для ультразвуковой локации (фиг. 1) содержит генератор 1 тактовых импульсов, генератор 2 зондирующих импульсов, передающий 3 и принимающий 4 акустические преобразователи, усилитель 5, компаратор 6, преобразователь 7 временных интервалов в напряжение, генератор 8 звуковой частоты и звуковой индикатор 9. Один из выходов генератора 1 тактовых импульсов соединен с входом генератора 2 зондирующих импульсов, а второй выход - с первым входом преобразователя 7 временных интервалов в напряжение. Выход генератора 2 соединен с передающим акустическим преобразователем 3. Выход приемного акустического преобразователя 4 соединен с усилителем 5, а выход последнего - с одним из входов компаратора 6. На другой вход компаратора подано пороговое напряжение Uп, а выход компаратора соединен с вторым входом преобразователя 7 временных интервалов. Выход последнего соединен с входом генератора 8 звуковой частоты, выход которого соединен со звуковым индикатором 9. Пороговое напряжение Uп выбрано при настройке в зависимости от отражательной способности объектов.
Преобразователь временных интервалов в напряжение (фиг. 3) состоит из генератора 10 счетных импульсов, счетчика 11 и цифро-аналогового преобразователя (ЦАП) 12. Вход генератора 10 счетных импульсов соединен с выходом генератора 1 тактовых импульсов, а выход - с входом счетчика 11. Управляющий вход счетчика соединен с выходом компаратора 6, а выход счетчика - с входом ЦАП 12. Выход последнего соединен с входом генератора 8 звуковых колебаний.
С помощью генератора 1 тактовых импульсов и генератора 2 зондирующих ультразвуковых импульсов создают короткие ультразвуковые сигналы с периодом повторения Т (эпюры 1 и 2 на фиг. 2), которые с помощью передающего акустического преобразователя 3 излучаются в направлении обзора. Период Т выбирают не менее времени прохождения ультразвуковым сигналом двойного максимального лоцируемого расстояния.
Отраженный от объекта (препятствия) ультразвуковой сигнал поступает на приемный акустический преобразователь 4 и через усилитель 5 - на компараторе 6. В компараторе амплитуду усиленного эхосигнала сравнивают с пороговым уровнем (напряжением) Uп (эпюра 3) и при превышении эхосигналом порогового уровня фиксируют величину временного интервала между зондирующим и отраженным ультразвуковыми сигналами. Далее преобразуют временной интервал, пропорциональный расстоянию до объекта, в напряжение с помощью преобразователя 7 и с помощью генератора 8 звуковых колебаний, частота которых изменяется в зависимости от величины временного интервала между зондирующим и отраженным ультразвуковыми сигналами. Звуковой сигнал от звукового индикатора 9 воспринимается человеком, как информация о дальности объекта. На фиг. 2 временному интервалу Δ t1 (эпюра 4) соответствует звуковой сигнал на эпюре 5, а более близкому расстоянию того же объекта соответствуют эпюры: 6 (эхоимпульс), 7 (временной интервал Δ t2) и 8 (частота звука возрастает по мере уменьшения временного интервала, т.е. расстояния до объекта).
Пороговый уровень Uп на компараторе выбирают таким, чтобы амплитуда эхоимпульса от объекта с максимальным коэффициентом отражения ультразвукового сигнала от его поверхности была равна пороговому уровню при дальности этого объекта, равной максимальному лоцируемому расстоянию. Тогда все объекты с меньшей отражательной способностью будут фиксироваться на меньших расстояниях, при этом формирование звуковых колебаний будет начинаться, соответственно, с других тональностей звука (в данном случае - с более высоких частот). Таким образом, по тональности (частоте), с которой начинаются звуковые колебания (по начальному тону звуковых колебаний), можно определить тип объекта по отражательной способности. На фиг. 2 объекту с большей отражательной способностью соответствует эхоимпульс, изображенный пунктиром на эпюре 3, а также временной интервал Δt3 (эпюра 4) и, соответственно, более низкая частота звуковых колебаний (эпюра 9).
Преобразование временных интервалов в напряжение может быть осуществлено, например, с помощью устройства (фиг. 3), которое работает следующим образом. При срабатывании генератора 1 тактовых импульсов (фиг. 1) запускается генератор 10 счетных импульсов и на вход счетчика 11 начинают поступать счетные импульсы. С приходом эхосигнала, превышающего пороговый уровень, на управляющий вход счетчика поступает сигнал с компаратора 6 и счет импульсов прекращается. При этом на выходе счетчика 11 устанавливается двоичный код, соответствующий числу зафиксированных счетных импульсов, т.е. временному интервалу, пропорциональному расстоянию до объекта. С помощью ЦАП 12 двоичный код преобразуется в напряжение, которое управляет частотой звукового генератора 8.
Предлагаемый способ ультразвуковой локации может быть применен для ориентации людей и обнаружения препятствий в условиях плохой видимости (темное время суток, дым, туман и т.п.), а также для слепых.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УЛЬТРАЗВУКОВОЙ ЛОКАЦИИ В УСЛОВИЯХ ПЛОХОЙ ВИДИМОСТИ | 1991 |
|
RU2011204C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ДИСТАНЦИЙ ДО КРОМОК СУДОХОДНОЙ ПОЛОСЫ И ОБНАРУЖЕНИЯ ПРЕПЯТСТВИЙ НА НЕЙ | 1991 |
|
RU2006874C1 |
| Способ профилирования структуры донных осадков | 2023 |
|
RU2835813C1 |
| Устройство для ультразвукового измерения характеристик внутричерепной гемоликвородинамики | 1987 |
|
SU1507334A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТОВ ЛОКАЦИИ В РАДИОЛОКАЦИОННЫХ ДАТЧИКАХ С ЧАСТОТНОЙ МАНИПУЛЯЦИЕЙ НЕПРЕРЫВНОГО ИЗЛУЧЕНИЯ РАДИОВОЛН И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2695799C1 |
| Ультразвуковой локатор для слепых | 1982 |
|
SU1053829A1 |
| ЛАЗЕРНЫЙ КОГЕРЕНТНЫЙ ЛОКАТОР | 2007 |
|
RU2352958C1 |
| Акустический измеритель расстояния | 1988 |
|
SU1532892A1 |
| СПОСОБ РАСПОЗНАВАНИЯ ЦЕЛЕЙ ОТ СЛУЧАЙНЫХ РЕВЕРБЕРАЦИОННЫХ ПОМЕХ | 2008 |
|
RU2365938C1 |
| АКУСТИЧЕСКИЙ ЭХОЛОКАТОР | 2002 |
|
RU2288484C2 |
Изобретение относится к оксецентным системам с отражением ультразвуковых волн и может быть использовано при ориентации в условиях плохой видимоти или для слепых. Цель изобретения - повышение разрешающей способности локации за счет различных типов объектов по их отражательной способности. Для этого периодически излучают ультразвуковой сигнал в направлении обзора, принимают отраженный от объекта ультразвуковой сигнал. Определяют интервал времени между зондирующим и отраженным ультразвуковыми сигналами, пропорциональный расстоянию до объекта. Формируют звуковой сигнал, зависящий от диазонного интервала времени. При этом амплитуду отраженного ультразвукового сигнала сравнивают с пороговым уровнем, задаваемым в зависимости от коэффициентов отражения ультразвуковых колебаний от поверхности объектов. Звуковой сигнал подается на звуковой индикатор с момента равенства амплитуды отраженного ультразвукового сигнала пороговому уровню и по начальному тону звукового сигнала определяют тип объекта. Пороговый уровень выбирают равным амплитуде ультразвукового сигнала, отраженного от объекта с максимальным коэффициентом отражения, расположенного на максимально лоцируемом расстоянии. 1 з.п.ф-лы, 3 ил.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Ультразвуковой локатор для слепых | 1986 |
|
SU1313440A1 |
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
