Изобретение относится к автомобилестроению, в частности к автоматическим антиблокировочным системам торможения автомобиля.
Известны антиблокировочные системы торможения каждым колесом автомобиля, содержащие датчик скорости колеса, дифференциатор и блок управления, формирующий командные сигналы модулятору, работающему по трехфазному циклу - рост давления, отсечка давления и сброс давления.
Наиболее близким к изобретению по технической сущности является антиблокировочная система торможения автомобиля, работающая по трехфазному циклу и содержащая блок вычисления приближенной скорости автомобиля и систему торможения каждого колеса, содержащую последовательно соединенные датчик угловой скорости колеса и блок вычисления скорости колеса, последовательно соединенные первый логический блок и блок формирования сигналов на модулятор, при этом выходы блока вычисления приближенной скорости автомобиля подключены к входам первых логических блоков для каждого колеса.
В указанной системе командные сигналы на каждый модулятор формируются с помощью дифференциатора, в качестве которого используется дифференцирующее звено на выходе блока вычисления скорости колеса. При этом в условиях дорожных и собственных помех в автомобиле возможны несанкционированные отклонения сигнала скорости колеса и в условиях дифференцирования этого сигнала возможно нарушение нормального функционирования антиблокировочной системы торможения. Кроме того, в известных системах организован циклический режим торможения, требующий значительного расхода рабочего тела тормозной системы.
Цель изобретения - повышение помехоустойчивости антиблокировочной системы за счет исключения операции дифференцирования сигнала скорости колеса и снижение расхода рабочего тела тормозной системы за счет организации нециклического режима торможения.
Эта цель достигается тем, что в антиблокировочную систему управления торможением автомобиля, работающую по трехфазному циклу и состоящую из блока вычисления приближенной скорости автомобиля и систем торможения каждого колеса, каждая из которых содержит последовательно соединенные датчик угловой скорости колеса, и блок вычисления скорости колеса, последовательно соединенные первый логический блок и блок формирования сигналов на модулятор. Выходы блока вычисления приближенной скорости автомобиля подключены к входам первых логических блоков для каждого колеса, введены в каждой системе торможения каждого колеса имитатор текущего изменения тормозного момента, имитатор динамики математического колеса, блок формирования сигнала, пропорционального моменту реакции дороги, второй логический блок, фильтр высоких частот и сумматор с прямым и инверсным входами, при этом командные выходы блока формирования сигналов на модулятор подключены к входам имитатора текущего изменения тормозного момента, выход которого через имитатор динамики математического колеса соединен со вторым входом первого логического блока, непосредственно со вторым входом блока формирования сигналов на модулятор и через инверсный вход сумматора с входом блока формирования сигнала, пропорционального моменту реакции дороги, выход которого подключен ко второму входу имитатора динамики математического колеса и через высокочастотный фильтр - к первому входу второго логического блока. Выход блока вычисления скорости колеса соединен с прямым входом сумматора, выход имитатора текущего изменения тормозного момента через второй вход второго логического блока подключен к третьему входу блока формирования сигналов на модулятор. Входы и выходы блока вычисления приближенной скорости автомобиля подключены соответственно к выходам высокочастотных фильтров и к первым входам первых логических блоков сравнения каждой системы торможения каждого колеса.
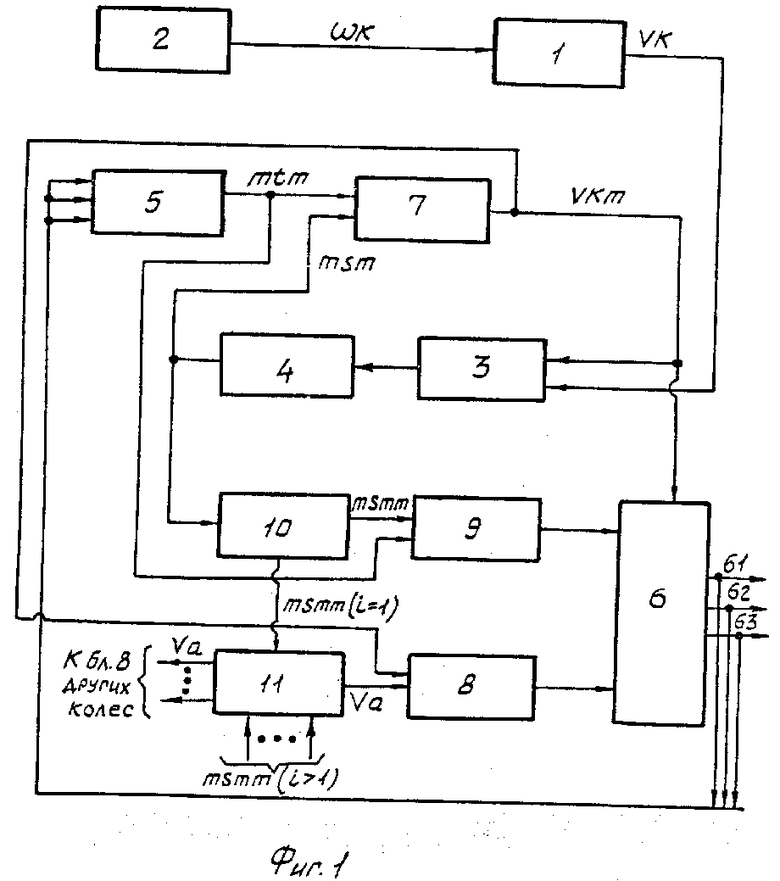
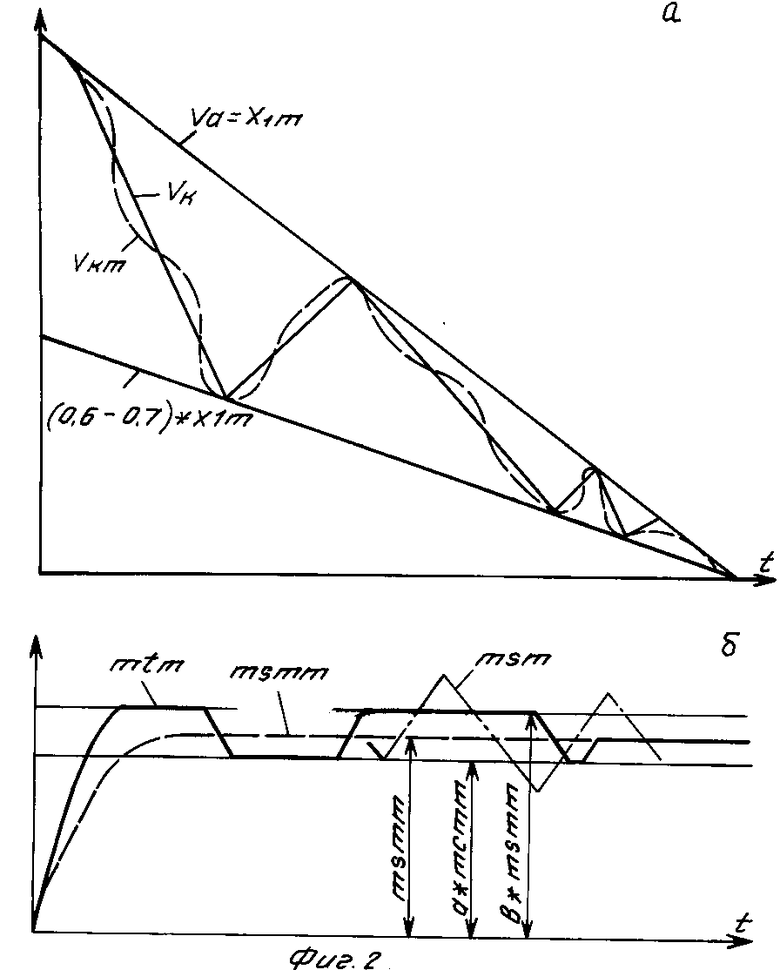
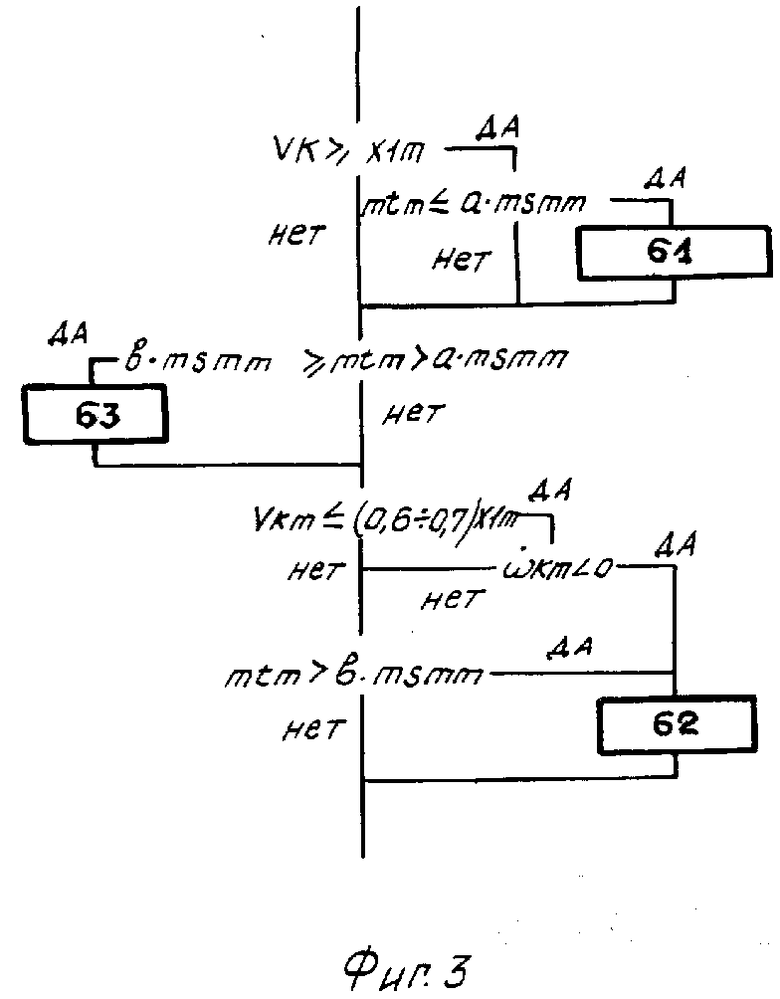
На фиг. 1 показана блок-схема антиблокировочной системы торможения для одного колеса; на фиг. 2 (а и б) - графики, поясняющие работу системы; на фиг. 3 - блок-схема алгоритма формирования команд на модулятор.
На графиках и в описании использованы следующие обозначения: va - скорость автомобиля; vk= ω k˙rk, v1k= ω 1k˙rk - скорость и ускорение колеса автомобиля; rk - истинный радиус колеса; vkm = ω km˙ rkp, v1km = ω 1km˙ rkp - скорость и ускорение математического колеса; rko, jko - расчетные радиус и момент инерции колеса; σ1, σ2, σ3, - команды (рост давления, его сброс и выдержка) на модулятор; mt, ms - текущие значения истинных тормозного момента и момента реакции дороги; mtm, msm - текущие значения имитированных тормозного момента и момента реакции дороги; msmm - отфильтрованный сигнал имитированного момента реакции дороги.
Система торможения каждого колеса содержит блок 1 вычисления скорости колеса, который своим входом соединен с датчиком 2 угловой скорости колеса, а выходом подключен к прямому входу сумматора 3, выход которого соединен с входом блока 4 вычисления сигнала, пропорционального моменту реакции дороги, имитатор 5 текущего изменения тормозного момента, к входам которого подключены выходы блока 6 формирования сигналов на модулятор, а выход которого через имитатор 7 динамики математического колеса соединен с инверсным входом сумматора 3 и через первый логический блок сравнения 8 - с первым входом блока управления 6. Выход имитатора 5 подключен также через второй вход второго логического блока сравнения 9 ко второму входу блока 6 формирования сигналов на модулятор, выход блока 4 - ко второму входу блока 7 и входу высокочастотного фильтра 10, выход которого подключен к первому входу второго логического блока сравнения. Выходы высокочастотных фильтров 10 каждой системы торможения каждого колеса подключены к соответствующим входам блока 11 вычисления приближенной скорости автомобиля, соответствующие выходы которого соединены с первыми входами первых логических блоков сравнения 8 других систем торможения каждого колеса.
Система работает следующим образом. В процессе торможения автомобиля в блоке 1 формируется сигнал текущей скорости колеса vk, в блоке 5 - сигнал текущего имитированного тормозного момента mtm, а в блоке 7 по соотношению
v1km=  , vkm= ∫v1km·dt сигнал текущей скорости математического колеса. За счет минимизации разности
, vkm= ∫v1km·dt сигнал текущей скорости математического колеса. За счет минимизации разности
Δ v = vk - vkm на выходе блока 4 формируется сигнал, пропорциональный моменту реакции дороги. Процесс минимизации разности Δ v в блоке 4 определяется соотношениями
msm(t) = msmo + dmsm(t);
dmsm(t)=  где msmo - начальное значение момента реакции дороги, задаваемое в момент начала торможения и восстанавливаемое после его окончания;
где msmo - начальное значение момента реакции дороги, задаваемое в момент начала торможения и восстанавливаемое после его окончания;
ks - параметр определяемый экспериментально из условия формирования пилообразного сигнала msm на частотах, на порядок превышающих частоты изменения сигнала скорости колеса в режиме торможения.
Пилообразный сигнал msm фильтруется фильтром высоких частот 9. Необходимый для функционирования сигнал приближенной скорости автомобиля x1m формируется в блоке 11 согласно соотношению
xim= -  , x1m= ∫xim·dt, i= 1÷n - номер колеса.
, x1m= ∫xim·dt, i= 1÷n - номер колеса.
На фиг. 2 отображены графики изменения в процессе торможения скорости автомобиля va, скорости колеса vk, скорости математического колеса vkm, имитированного тормозного момента mtm и сформированного сигнала msm, пропорционального моменту реакции дороги. Если в блоке 5 осуществляется точная имитация тормозного момента, т. е. mtm = mt, то в блоке 4 формируется сигнал, определяющий истинное значение момента реакции дороги. Если в блоке 5 имитация тормозного момента происходит с погрешностью относительно истинного значения mt, то такой же уровень погрешности вносится в сигнал, пропорциональный моменту реакции дороги. В обоих случаях регулирование изменения давления в модуляторе осуществляется по четырем логическим условиям, формируемым во втором логическом блоке 9 и двум условиям, формируемым в первом логическом блоке 8.
Основной режим работы системы - режим отсечки (выдержки) давления - устанавливается командой 63 при (фиг. 3)
mtm > a. msmm и mtm < b. msmm;
a < 1,0; b > 1,0; рост давления устанавливается командой σ1 при
ω km ˙rkо ≥ x1m и mtm ≅ a. msmm; сброс давления устанавливается командой σ 2 при
ω km ˙ rko≅ (0, 6 - 0,7). ˙x1m или mtm > b˙msmm
Из изложенного видно, что динамика торможения колеса в пределах (0,6 - 0,7) ˙ x1m > vk ≥ x1m определяется разностями mtm - a˙msmm, mtm - b˙msmm, которые равны уставкам ускорения v1km математического колеса; так как в процессе формирования сигнала, пропорционального моменту реакции дороги, осуществляется минимизация Δ v = vk - vkm, то можно утверждать, что регулирование торможения происходит по заданным уставкам замедления или разгона или замедления математического колеса. Таким образом, процесс торможения в предлагаемой системе формируется без информации о ускорении каждого колеса и основан на вычислении скорости математического колеса и косвенном измерении действительного ускорения колеса. Указанные параметры вычисляются с высокой точностью, в результате чего повышается помехозащищенность системы.
Кроме того, путем соответствующего выбора параметров а и l можно добиться, чтобы процесс регулирования протекал в малой окрестности истинного текущего значения момента реакции дороги в рамках нециклического режима с малым расходом рабочего тела в модуляторах.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА ДЛЯ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ КОЛЕСА АВТОМОБИЛЯ | 1992 |
|
RU2011579C1 |
| Способ экспресс-проверки работоспособности антиблокировочных тормозных систем транспортных средств в лабораторных условиях | 1985 |
|
SU1355524A1 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| Способ управления торможением транспортного средства и устройство для его осуществления | 2022 |
|
RU2819157C1 |
| Стенд для испытаний системы управления торможением колес транспортного средства | 1978 |
|
SU776945A2 |
| Стенд для испытаний систем управления торможением колес транспортных средств | 1980 |
|
SU935353A1 |
| АНТИБЛОКИРОВОЧНАЯ СИСТЕМА УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ АВТОМОБИЛЯ | 2004 |
|
RU2276023C1 |
| СПОСОБ УПРАВЛЕНИЯ АНТИБЛОКИРОВОЧНОЙ И ПРОТИВОБУКСОВОЧНОЙ СИСТЕМОЙ (АБС/ПБС) ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2324611C2 |
| ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2266828C2 |
| АНТИБЛОКИРОВОЧНОЕ УСТРОЙСТВО "РОДИНА" ДЛЯ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2254247C1 |
Использование: в системах управления торможением двухосного автомобиля. Сущность изобретения: система содержит для каждого колеса автомобиля датчик угловой скорости колеса, блок имитации тормозного момента и блок имитации динамики математического колеса. В блоке имитации динамики математического колеса осуществляется минимизация разностного сигнала, в результате чего формируется пилообразный сигнал момента реакции дороги, который путем фильтрации преобразуется и подается на вход блока формирования сигналов управления модулятора. В этом блоке формируется сигналы, пропорциональные уставкам углового ускорения математического колеса. Блок формирования сигналов на модулятор может быть выполнен в виде двух одинаковых блоков, каждый из которых управляет торможением диагонально расположенных колес. 1 з. п. ф-лы, 3 ил.
