Изобретение относится к транспорту, а именно антиблокировочной и противобуксовочной системе транспортных средств.
Известен способ управления АБС/ПБС транспортного средства, при котором по сигналам датчика скорости вращения колеса вычисляется скорость, ускорение колес, скорость транспортного средства и величины проскальзывания, буксования колес. Полученные величины проскальзывания, буксования и ускорения колес сравнивают с заданными пороговыми величинами - «уставками». При достижении их равенства подаются управляющие команды на изменение тормозного или крутящего момента колес (Фрумкин А.К. и др. Современные антиблокировочные и противобуксовочные системы грузовых автомобилей, автобусов и прицепов, М., 1990; патент США 4855416, кл. В60Т 8/32, 1989; патент США 5224043, кл. В60Т 8/32, 1993; патент США 5012417, кл. В60Т 8/32, 1991; патент США 4831532, кл. В60Т 8/32,1989).
Близким по цели решаемой изобретением задачи является способ реализованный в системе контроля сцепления колес с опорной поверхностью (патент США 4969100, кл. G01Р 3/4, 1990). Этот способ управления аналогичен рассмотренному выше.
Однако такой способ управления имеет ряд существенных недостатков. Способ основан на использовании зависимости коэффициента сцепления колеса Y с опорной поверхностью от степени проскальзывания или буксования колеса S. Задачей управления АБС/ПБС по известному способу является поддержание величины проскальзывания или буксования колеса в узком интервале значений вблизи Sкр, соответствующему максимальному значению Y. Задача нахождения текущего значения Sкр, соответствующего максимальному значению Y, по кинематическим параметрам колеса не может быть решена, так как ни одна из текущих координат максимального значения Y диаграммы Y-S не может быть измерена. Поэтому заранее задается ожидаемая вероятная величина Sкр - «уставка». Действительная величина Sкр может изменяться в широких пределах, на грязных и мокрых дорогах - от 0,1 до 0,5. Поэтому подводимый к колесу тормозной или крутящий момент может не соответствовать максимальному значению Y.
Практическое использование параметра проскальзывания, буксования вызывает ряд затруднений не только тем, что косвенное определение линейной скорости автомобиля вносит погрешности в процесс регулирования, но и потому, что этот способ регулирования не обеспечивает адаптивности АБС/ПБС. «Уставка» по заданной величине проскальзывания, буксования не может обеспечить и оптимальный тормозной или тяговый режим в различных дорожных условиях, когда величина максимального Y может соответствовать Sкр, значительно отличающейся от заданной «уставки» [1].
Использование параметра ускорения колеса не устраняет полностью основного недостатка - отсутствия адаптации к дорожным условиям. Это связано с тем, что ускорение колеса, соответствующее началу блокирования или буксования колеса, зависит от множества факторов [2].
В способе управления не использована информация о действительном значении радиальной нагрузки на колесо, необходимой для обеспечения оптимального управления АБС/ПБС [2, 3, 4]. Это приводит к тому, что при движении транспортного средства на крутых поворотах, дорогах с уклонами АБС/ПБС могут снижать тормозную и тяговую эффективность, из-за перераспределения нагрузок на колеса.
Кроме того, применение известных АБС/ПБС с таким способом управления для полноприводных транспортных средств связано с необходимостью решения ряда технически сложных задач.
Предложенные меры по улучшению функционирования АБС/ПБС при движении транспортного средства на поворотах (патент США 5504680, кл. В60К 28/16, 1996; патент США 4902076, кл. В60Т 8/58, 1990), на дорогах с уклонами (патент США 4964047, кл. В60Т 8/32, 1990; патент США 5458212, кл. В60К 28/16, 1995) и при использовании АБС/ПБС для полноприводных транспортных средств (патент США 5009279, кл. В60К 28/16, 1991) приводят к значительному усложнению АБС/ПБС и увеличивают их стоимость, что не всегда приемлемо.
Способ управления недостаточно помехоустойчив из-за использования в управлении АБС/ПБС кинематических параметров колеса, степени проскальзывания, буксования и ускорения колеса в условиях помех, вызванных неровностями дороги, колебаниями масс автомобиля, которые могут приводить к появлению ложных или несвоевременных команд. Работа АБС/ПБС становится не эффективной, сопровождается сбоями [5].
Рассмотренный способ управления АБС/ПБС по своему принципу действия не обеспечивает поддержания тормозного или тягового режима в области максимального значения коэффициента сцепления колеса с дорогой. Найти предельную величину подводимого тормозного или крутящего момента к колесу без блокирования или буксования практически невозможно. Таким АБС/ПБС в юзовом режиме свойственны колебания тормозного или крутящего момента. При больших амплитудах циклических колебаний нарушается комфортабельность (дергание), а элементы конструкции автомобиля испытывают дополнительные динамические нагрузки [4].
Известный способ управления АБС/ПБС требует производить сложные и громоздкие вычисления с наличием сложных вычислительных средств - микропроцессоров, имеет сложный алгоритм функционирования, что снижает надежность, увеличивает стоимость АПБ/ПБС и их эксплуатации.
Задачей, решаемой изобретением, является обеспечение регулирования подводимого к колесу тормозного или крутящего момента, соответствующего максимальной силе сцепления колеса с опорной поверхностью и адаптации процесса регулирования к переменным характеристикам системы "тормоз, двигатель-колесо-опорная поверхность" по критерию максимальной силы сцепления колеса с опорной поверхностью.
Поставленная задача решается тем, что в предлагаемом способе управления АБС/ПБС транспортного средства в процессе торможения или тягового режима вычисляют производную по времени функции квадрата сигнала датчика скорости вращения колеса, затем электрический сигнал, пропорциональный производной, подают в экстремальный регулятор, находят экстремум сигнала, соответствующего экстремуму тормозной или тяговой мощности на колесе и максимальному сцеплению колеса с опорной поверхностью, поддерживают текущее значение сигнала вблизи экстремума, при отклонении сигнала от экстремума больше установленной величины по сигналам экстремального регулятора формируют и подают управляющие сигналы на модулятор давления тормозного привода или на устройства регулирования крутящего момента и проводят операцию уменьшения/увеличения давления в тормозном приводе или крутящего момента колеса.
Экстремум сигнала находят по методу запоминания экстремума или по приращению сигнала.
Управление торможением или тяговым режимом осуществляют раздельно для каждого колеса или для группы колес блоком управления АБС/ПБС, объединенным с модулятором давления в один узел и подключенным к датчику скорости вращения колеса.
Поставленная задача решается также и тем, что сигнал датчика скорости вращения колеса подают на вход формирующего устройства блока управления, в котором частоту сигнала возводят в квадрат и преобразуют сигнал в прямоугольные импульсы, которые подают в течение установленного промежутка времени, определяемого генератором временных импульсов, на один из входов реверсивного счетчика, а затем в течение такого же промежутка времени - на другой вход счетчика, разность импульсов с выхода счетчика, пропорциональную производной электрического сигнала, преобразуют в пропорциональный электрический сигнал и подают его в экстремальный регулятор, в котором по методу запоминания экстремума находят разность между текущим и экстремальным значением электрического сигнала, сравнивают ее значение с установленной величиной и при обнаружении их равенства формируют и подают управляющие сигналы на модулятор давления тормозного привода или на устройства регулирования крутящего момента колеса.
Управление торможением или тяговым режимом осуществляют раздельно для каждого колеса или для группы колес блоком управления АБС/ПБС, объединенным с модулятором давления в один узел и подключенным к датчику скорости вращения колеса.
Обеспечить оптимальный процесс торможения или тягового режима транспортного средства и его адаптацию к переменным характеристикам опорной поверхности возможно только в том случае, если закон изменения тормозного, крутящего момента, подводимого к колесу, будет следовать закону изменения максимальной силы сцепления колеса с опорной поверхностью
Мт≤YRZ, Рт≤YZ=Рсц,
где Мт=РтR - максимальный тормозной или крутящийся момент колеса;
Рт - максимальная тормозная или сила тяги колеса - касательная реакция опорной поверхности;
R - радиус качения колеса, величина переменная;
Z - радиальная нагрузка на колесо;
Y - максимальный коэффициент сцепления колеса с опорной поверхностью;
Рсц - максимальная сила сцепления колеса с опорной поверхностью.
Реализовать этот идеальный закон регулирования практически невозможно, так как неизвестны текущие действительные значения Y, R, Z. Непосредственное их измерение является сложной технической задачей, которая практически не решена. Поэтому в способе управления известных АБС/ПБС используют косвенный метод оценки коэффициента сцепления, по степени проскальзывания и ускорению колеса [3, 4].
В решаемой изобретением задаче процесс торможения или тягового режима рассматривается как энергопреобразующий переходный процесс, на который действует множество неконтролируемых динамических факторов.
Этот процесс соответствует уравнению движения колеса в энергетической (интегральной) форме. Изменение кинетической энергии вращения колеса равно сумме работ всех внешних, внутренних сил и моментов, действующих на колесо. В дифференциальной форме уравнение имеет вид [6]
dT=d (JW2/2=dA=MTWdt=YRZWdt,
где Т - кинетическая энергия колеса;
J - приведенный момент инерции колеса, постоянная величина;
W=КП - скорость вращения колеса;
А - сумма работ всех действующих сил и моментов на колесо;
К - постоянный коэффициент;
П - частота импульсов датчика скорости вращения колеса;
dT>0 - тяговый режим; dT<0 - тормозной режим
dT=df(П2)=f(МтП)dt=f(YZRП)dt.
Производная по времени функции кинетической энергии является уравнением вращения колеса в переходном процессе торможения или тягового режима
d/dtf(П2)=f(МтП)=f(YZRП)=F.
Функция F пропорциональна тормозной и тяговой мощности колеса. В начале и конце переходного процесса значения функции равны нулю, а в промежутке имеют экстремум
d/dtf(П2)=0, f(МтП)=0, f(YZRП)=0,F=0.
Экстремум функций соответствует максимальной силе сцепления колеса с опорной поверхностью Рсц=YZ и соответственно максимальному значению подводимого к колесу тормозного или крутящего момента Мт=YZR. Сила сцепления имеет максимальное значение при максимальном коэффициенте сцепления Y.
В уравнении переходного процесса контролируется и измеряется только параметр П. Известно также, что функция F имеет экстремум. Остальные параметры Y, Z, R, Мт не известны. При отсутствии информации о величинах параметров Y, Z, R для нахождения подводимого к колесу Мт, соответствующего экстремуму функции F и максимальной силе сцепления колеса с опорной поверхностью, применена адаптивная автоматическая система - экстремальный регулятор [7, 8, 9, 10].
Задача адаптации АБС/ПБС к изменяющимся дорожным условиям состоит в формировании и подачи управляющих сигналов на изменение Мт для нахождения экстремума функции F и поддержании ее значения вблизи экстремума.
Основной процесс в экстремальном регуляторе - это автоматический поиск, заключающийся в изменении Мт, анализе результатов этого изменения и определения дальнейшего изменения Мт с целью достижения экстремума функции F.
Управление процессом торможения или тяговым режимом колеса предполагает постоянное измерение сигнала F, производной функции кинетической энергии колеса, сравнение его с экстремальной величиной сигнала и изменение подводимого к колесу момента в соответствии с возникающей ошибкой (т.е. разности между экстремальным и действительным значением сигнала).
Реализуется идеальный закон регулирования согласно формуле
Мт≤(РтR)max, Рт≤(YZ)max=Рсц.
Для управления АБС/ПБС не требуется проводить сложных, громоздких вычислений и сложных вычислительных средств - микропроцессоров. Соответствующий алгоритм предельно прост, что упрощает АБС/ПБС, повышает надежность работы и снижает их стоимость.
Предложенный способ управления АБС/ПБС обеспечивает изменение тормозного или крутящего моментов подводимого к колесу в соответствии с изменением максимальной силы сцепления колеса с опорной поверхностью. Таким образом, способ управления АБС/ПБС обеспечивает адаптацию транспортного средства к дорожным условиям при движении в тормозном или тяговом режиме, в том числе на крутых поворотах и на дорогах с уклонами.
Способ может быть использован для управления АБС/ПБС полноприводного транспортного средства, так как обеспечивается контроль текущего значения максимальной силы сцепления колеса, соответствующей изменению радиальной нагрузке на колесо и не требуется свободное колесо для нахождения опорной скорости транспортного средства.
Способ управления имеет более высокую полимехозащищеность, так как для управления используется интегральный энергетический параметр F.
Способ управления позволяет создать малогабаритный блок управления АБС/ПБС с минимальным количеством комплектующих элементов и с относительно низкой стоимостью. Небольшие габариты блока дают возможность объединить его в один узел с модулятором давления и подключить его к датчику скорости вращения колеса коротким проводом, около одного метра (в известных АБС/ПБС - 7...10 м). С применением короткого провода уменьшается влияние электромагнитных помех и обеспечивается более мощный выходной сигнал. АБС/ПБС такой конструкции будет иметь более высокое качество работы при меньшей стоимости изготовления и эксплуатации.
На основе предложенного способа управления может быть создана простая с низкой стоимостью АБС/ПБС для транспортного средства с управлением тормозным и тяговым режимом ведущих колес оси водителем по световым сигнальным индикаторам, включаемым управляющими командами от блока управления. К блоку управления подключается датчик скорости вращения, который устанавливается на корпусе дифференциала против зубьев шестерни или около колеса.
На фиг.1 показан график зависимости функции F и Рсц от тормозного или крутящего от двигателя момента Мт, подводимого к колесу. Для обеспечения максимальной эффективности тормозного и тягового режима необходимо, чтобы выполнялись условия
F=Fmax, Мт=Мопт и Рсц=ZYmax,
где Мтопт - предельный момент по условиям сцепления колеса с опорной поверхностью при максимальной силе сцепления Рсц.
На графике точка О - начало торможения или тягового режима; точка А - блокирование или буксование колеса.
При этом как сама величина экстремума функции F, так и соответствующее ему значение Мтопт. изменяются неконтролируемым образом в зависимости от сил и моментов, действующих на колесо. Для поиска экстремума в таких условиях применена адаптивная автоматическая система - экстремальный регулятор [10, 11, 12].
На фиг.2 приведена структурная схема способа управления АБС/ПБС транспортного средства.
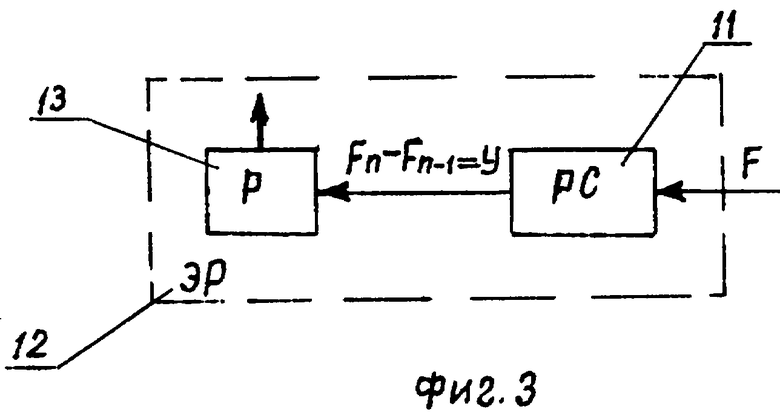
На фиг.3 показана структурная схема экстремального регулятора для поиска экстремума по приращению функции F.
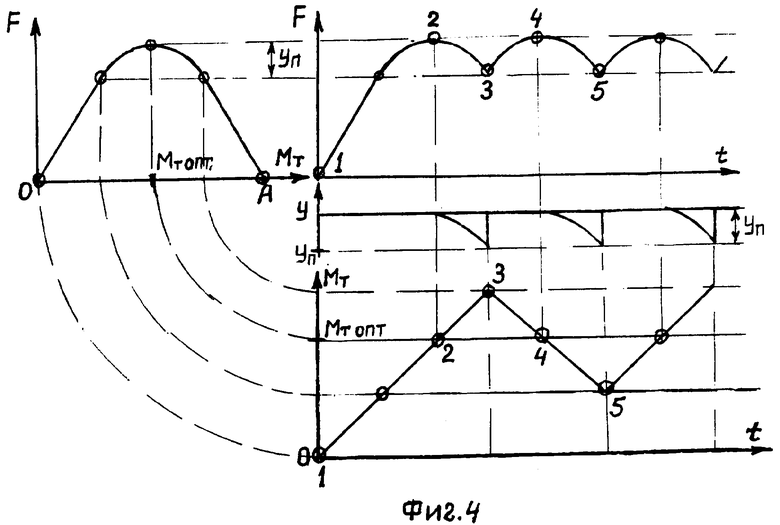
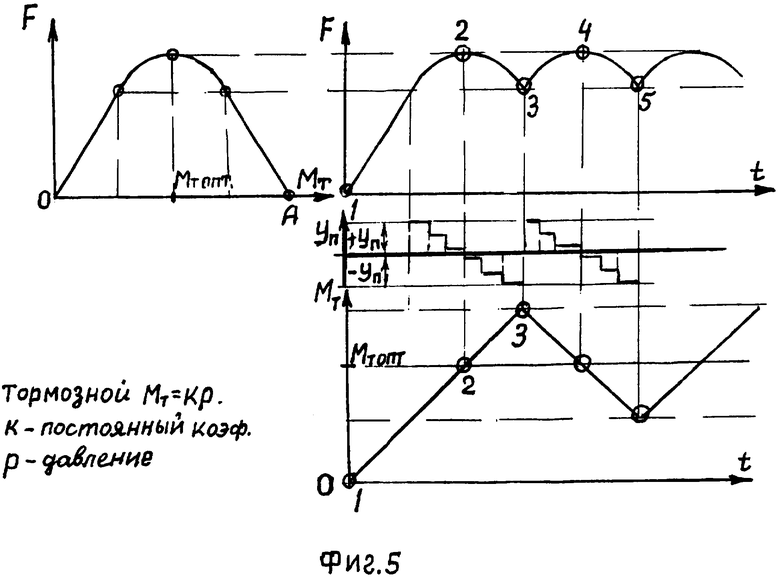
На фиг.4, 5 показаны диаграммы работы регулятора с запоминанием экстремума и по приращению функции F соответственно. Графики изменения F в зависимости от Мт и времени t. Тормозной момент Мт пропорционален давлению в тормозном приводе колеса р.
Способ управления АБС/ПБС транспортного средства реализуется посредством структурной схемы (фиг.2).
При торможении АБС/ПБС работает в режиме АБС. При нажатии на тормоз в тормозном приводе 1 колеса увеличивается давление и возрастает Мт на участке 1-2 (фиг.4, 5). Сигнал с датчика скорости вращения колеса 2 поступает на вход формирующего устройства 3. В формирующем устройстве частота сигнала возводится в квадрат, сигнал преобразуется в прямоугольные импульсы и поступает на вычислитель производной функции по времени сигнала - на вход реверсивного счетчика 4. С выхода вычислителя электрический сигнал пропорциональный разности импульсов выхода счетчика и производной d/dtf(n2)=F подается на запоминающее устройство 5 экстремального регулятора 6.
Характеристика функции F показана на фиг.1. Сигнал с запоминающего устройства непрерывно подается на элемент сравнения 7, где сравнивается с текущим значением сигнала F. Сигнал разности F-Fmax с элемента сравнения поступает на реле 8. Когда разность F-Fmax достигнет пороговой установленной величины Yп, срабатывает реле и подается управляющая команда на модулятор давления 9 и на включение сигнальной лампы 10. Модулятор уменьшает давление в тормозном приводе и уменьшается Мт. После срабатывания реле запомненное запоминающим устройством значение Fмакс сбрасывается и запоминание сигнала F начинается снова.
Пояснение работы регулятора с запоминанием экстремума дается фиг.4. При увеличении тормозного момента Мт сигнал F возрастает от точки 1 до точки 2. Поскольку F все время увеличивается, выход ЗY непрерывно следит за изменением F, следовательно F-Fmax=0. В точке 2 система достигает экстремума, но Мт возрастает. После точки 2 значение F уже уменьшается и ЗУ запоминает Fmax. На входе реле появляется сигнал разности F-F max. В точке 3, когда F3-Fmax=Yп, реле срабатывает, происходит сброс запомненного значения Fmax, подается команда на модулятор для уменьшения Мт. Величина F увеличивается от точки 3 до точки 4, затем уменьшается до значения в точке 5. В точке 5, F-Fmax=Yп - установленной величине, срабатывает реле и подается команда на модулятор для увеличения давления и Мт, процесс повторяется. Устанавливаются колебания F вокруг экстремума, Мт относительно оптимального значения Мтопт.
Нахождение экстремума по приращению функции F реализуется посредством структурной схемы фиг.3 и поясняется фиг.5. С вычислителя 4 сигнал в виде последовательности импульсов через определенные промежутки времени подаются на вход реверсивного счетчика 11 экстремального регулятора 12. Разность импульсов на выходе счетчика пропорциональна приращению Y функции F. На реле 13 появляется сигнал пропорциональный приращению Y, с знаком Y<0 или Y>0.
При торможении (фиг.5) с увеличением Мт увеличивается и F от точки 1 до точки 2. Приращение F уменьшается и в точке экстремума 2 Y=0. При дальнейшем увеличении Мт значение Y в точке 3 сравнивается с установленной пороговой величиной Yп. Срабатывает реле и подается команда на модулятор для уменьшения Мт. Точка 3 по траектории кривой переходит в точки 4, 5. Процесс повторяется.
Тяговый режим. При работе АБС/ПБС в тяговом режиме управления ПБС реализуется также структурной схемой фиг.2, фиг.3 и диаграммами фиг.4, фиг.5 аналогичных АБС.
В этом случае канал управления модулятором давления АБС 14 устройством 15 переключается на канал управления ПБС, устройствами регулирования крутящего момента колеса путем подтормаживания колеса или изменением мощности двигателя.
Предусматривается несколько вариантов работы ПБС и соответствующая им комплектация:
АБС/ПБС и сигнальная лампа 10, загорание которой информирует водителя о появлении пробуксовки ведущего колеса;
АБС/ПБС и электроклапан ПБС 16. По управляющим командам от экстремального регулятора на электроклапан и модулятор давление поступает в тормозной привод и происходит подтормаживание колеса;
АБС/ПБС осуществляет подтормаживание ведущих колес и регулирование мощности двигателя. До определенной скорости колеса происходит подтормаживание колеса. При большой скорости электроклапан 16 и модулятор 9 отключаются. Управляющие команды переключаются на регулятор подачи топлива 17 двигателя 18 для уменьшения/увеличения его мощности, а следовательно, и крутящего момента Мт, подводимого к колесу.
Литература
1. А.К. Фрумкин. Регуляторы тормозных сил и антиблокировочных систем. М., 1981.
2. Петров В.А. Теоретические основы разработки антиблокировочных систем. - "Автомобильная промышленность", 1984, №2.
3. Юдаков Б.Ф. Противоблокировочные устройства. М. 1979.
4. Ломака С.И., Алекса Н.Н., Гецович Е.М. Автоматизация процесса торможения автомобиля. Киев, 1988.
5. Карузин С.И., Малюгин П.Н., Федотов А.И. Особенности работы антиблокировочной системы в условиях помех.- "Надежность и активная безопасность автомобиля", М., МАДИ, 1985.
6. Закабунин В.И. и др. Динамический анализ и синтез машинного агрегата. Барнаул, 1999.
7. Казакевич В.В., Родов А.Б. Система автоматической оптимизации. М., 1977.
8. Чинаев П.И. Самонастраивающиеся системы. Киев, 1969.
9. Олейников В.А. и др. Основы оптимального и экстремального управления. М.: 1969.
10. Автоматическая оптимизация управляемых систем. Под ред. Б.Н.Петрова. М., 1960.
11. Попов Е.П. Автоматическое регулирование и управление. М., 1966.
12. Основы автоматического регулирования и управления. Под ред. В.М. Пономарева, М., 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ МОБИЛЬНЫХ МАШИН | 1997 |
|
RU2125517C1 |
| Устройство распределения мощности в трансмиссии | 2022 |
|
RU2785241C1 |
| Способ управления торможением транспортного средства и устройство для его осуществления | 2022 |
|
RU2819157C1 |
| ТОРМОЗНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2003 |
|
RU2266828C2 |
| СПОСОБ УПРАВЛЕНИЯ АНТИБЛОКИРОВОЧНОЙ СИСТЕМОЙ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2103191C1 |
| Способ управления индивидуальным тяговым электроприводом ведущих колес многоколесного транспортного средства | 2023 |
|
RU2797069C1 |
| РЕГУЛЯТОР СКОРОСТИ КОЛЕСА ТРАНСПОРТНОЙ МАШИНЫ | 1992 |
|
RU2065367C1 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТОРМОЗОВ АВТОМОБИЛЯ, ОБОРУДОВАННОГО АНТИБЛОКИРОВОЧНОЙ СИСТЕМОЙ | 2009 |
|
RU2464187C2 |
| СПОСОБ ДИАГНОСТИРОВАНИЯ ТОРМОЗОВ АВТОМОБИЛЯ, ОБОРУДОВАННОГО АНТИБЛОКИРОВОЧНОЙ СИСТЕМОЙ | 2009 |
|
RU2408482C1 |

Изобретение относится к антиблокировочной и противобуксовочной системе транспортных средств. Вычисляют производную по времени функции квадрата сигнала датчика скорости вращения колеса. Электрический сигнал, пропорциональный производной, подают в экстремальный регулятор. Находят экстремум сигнала, соответствующего экстремуму тормозной или тяговой мощности на колесе и максимальному сцеплению колеса с опорной поверхностью. Поддерживают текущее значение сигнала вблизи экстремума. При отклонении сигнала от экстремума больше установленной величины по сигналам экстремального регулятора формируют и подают управляющие сигналы на модулятор давления тормозного привода или на устройства регулирования крутящего момента и проводят операцию уменьшения/увеличения давления в тормозном приводе или крутящего момента колеса. По второму варианту способа сигнал датчика скорости вращения колеса подают на вход формирующего устройства блока управления, в котором частоту сигнала возводят в квадрат и преобразуют сигнал в прямоугольные импульсы, которые подают в течение установленного промежутка времени на один из входов реверсивного счетчика, а затем в течение такого же промежутка времени - на другой вход счетчика. Разность импульсов с выхода счетчика преобразуют в пропорциональный электрический сигнал и подают его в экстремальный регулятор, в котором находят разность между текущим и экстремальным значением электрического сигнала. Сравнивают ее значение с установленной величиной. При обнаружении их равенства формируют и подают управляющие сигналы на модулятор давления тормозного привода или на устройства регулирования крутящего момента колеса. Технический результат заключается в повышении надежности антиблокировочной и противобуксовочной системы. 2 н. и 3 з.п. ф-лы, 5 ил.
| Противоблокировочное устройство тормозной системы транспортного средства | 1979 |
|
SU1662884A1 |
| Способ регулирования тормозного момента на колесе транспортного средства | 1980 |
|
SU933507A1 |
| СПОСОБ УПРАВЛЕНИЯ АНТИБЛОКИРОВОЧНОЙ СИСТЕМОЙ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА | 1996 |
|
RU2103191C1 |
| US 3734572 А, 22.05.1973. | |||

