Изобретение относится к автомобилестроению, в частности к автоматическим антиблокировочным системам торможения автомобиля.
Известен способ формирования сигнала для управления торможением автомобиля, включающий измерение действительной угловой скорости колеса, ее преобразование в сигнал действительной скорости колеса, имитацию динамики тормозного момента колеса, имитацию динамики колеса и формование сигнала скорости имитированного колеса.
В качестве сигнала для управления торможением автомобиля в известном способе используют сигнал оптимального скольжения, отвечающего максимальному сцеплению колеса с дорогой, который формируют путем аппроксимации зависимости сцепления от скольжения в функции скоростей колеса и автомобиля с применением математических методов линейной и нелинейной идентификации.
Известное решение связано с организацией сложного вычислительного процесса на борту автомобиля, кроме того, зависимость сцепления колеса с дорогой от скольжения для дорожного покрытия с малым коэффициентом сцепления (менее 0,3 - 0,4, например, для льда, снега и т. п. ) имеет слабо выраженный максимум, поэтому его идентификация и использование для организации процесса торможения на дорожном покрытии с малыми коэффициентами сцепления может иметь малую эффективность.
Цель изобретения - простое деформирование сигнала для управления торможением колеса автомобиля, которое может обеспечить идентификацию дорожного покрытия под колесом автомобиля и может быть использовано в алгоритме антиблокировочной системы для обнаружения перехода колеса, автомобиля с одного вида покрытия на другой, что в конечном итоге приведет к повышению качества регулирования процесса торможения.
Цель изобретения достигается за счет измерения действительной угловой скорости колеса автомобиля, ее преобразования в сигнал действительной скорости колеса, имитации динамики тормозного момента колеса и имитации динамики колеса, формирования сигнала скорости имитированного колеса и формирования разностного сигнала, пропорционального разности сигналов действительной и имитированной скоростей колеса, осуществления имитации динамики колеса в соответствии с выражением
ωkm=  dt где ω km - сигнал имитированной скорости колеса;
dt где ω km - сигнал имитированной скорости колеса;
mtm, msm - соответственно сигналы имитированного тормозного момента и момента реакции дороги;
jkp - расчетный момент инерции колеса.
Путем минимизации разностного сигнала получают сигнал момента реакции дороги, фильтруют его высокочастотным фильтром и подают на управление торможением колеса автомобиля.
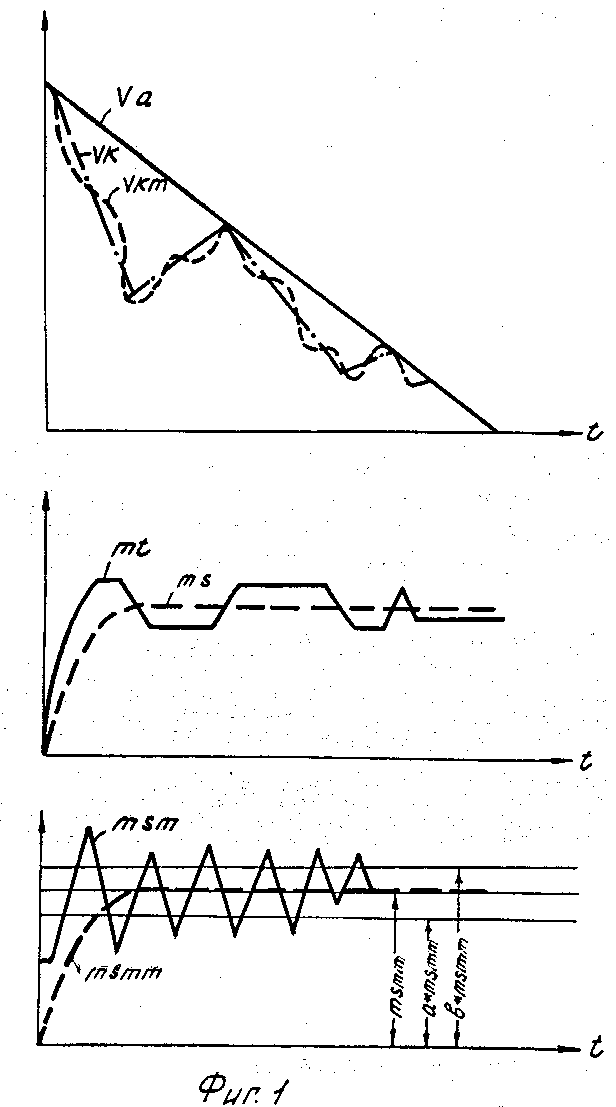
На фиг. 1 показаны динамические процессы торможения колеса; на фиг. 2 - блок-схема устройства, выполняющего последовательность операций; на фиг. 3 - блок-схема алгоритма минимизации разностного сигнала. На графиках и в описании использованы следующие обозначения: va - скорость автомобиля; vk= ω k˙rk, v1k= ω 1k ˙rk - скорость и ускорение колеса автомобиля; rk - истинный радиус колеса; vkm= ω km ˙ rkp, v1km = ω 1km˙ rkp - скорость и ускорение математического колеса; Δω - разностный сигнал; rkp, jkp - расчетные радиус и момент инерции колеса; mt, ms - текущие значения истинных тормозного момента и момента реакции дороги; mtm, msm - текущие значения имитированных тормозного момента и момента реакции дороги; σ - градиент нарастания (снижения) сигнала момента реакции дороги в процессе минимизации разностного сигнала; msmm - отфильтрованный сигнал имитированного момента реакции дороги.
Работа осуществляется следующим образом. В процессе торможения колеса непрерывно измеряют скорость ω k вращения колеса, величину которой преобразуют в сигнал действительной скорости колеса vk. Кроме этого, непрерывно имитируют динамику тормозного момента mtm и формируют соответствующий сигнал. Центральной операцией предлагаемого способа является определение текущего значения момента реакции дороги msm и формирование соответствующего сигнала. Для этого в соответствии с выражением
ωkm=  dt непрерывно имитируют динамику колеса и минимизируют сигнал Δω= ωk-ωkm разности действительной и имитированной скоростей колеса. Одним из способов минимизации является организация линейно нарастающего msm при Δω > 0 и линейно уменьшающегося msm при Δω < 0. Градиент увеличения (уменьшения) msm подбирают таким образом, чтобы частота результирующего знакопеременного пилообразного сигнала msm на порядок превышала частоту колебаний угловой скорости колеса в процессе торможения, т. е. находилась в диапазоне 10 - 20 Гц. Полученный сигнал msm фильтруют с помощью фильтра высоких частот, настроенного на указанную частоту, и получают гладкий сигнал msmm момента реакции дороги.
dt непрерывно имитируют динамику колеса и минимизируют сигнал Δω= ωk-ωkm разности действительной и имитированной скоростей колеса. Одним из способов минимизации является организация линейно нарастающего msm при Δω > 0 и линейно уменьшающегося msm при Δω < 0. Градиент увеличения (уменьшения) msm подбирают таким образом, чтобы частота результирующего знакопеременного пилообразного сигнала msm на порядок превышала частоту колебаний угловой скорости колеса в процессе торможения, т. е. находилась в диапазоне 10 - 20 Гц. Полученный сигнал msm фильтруют с помощью фильтра высоких частот, настроенного на указанную частоту, и получают гладкий сигнал msmm момента реакции дороги.
Сформированный сигнал msmm определяет характер дорожного покрытия под колесом автомобиля и может быть использован в алгоритме антиблокировочной системы для обнаружения перехода колес автомобиля с одного вида покрытия на другой. Кроме этого, формируя разности mtm - a. msmm > 0, mtm - b. msmm, a<1, b<1, эквивалентные косвенно измеренным уставкам по ускорению математического колеса (а следовательно, и по действительному ускорению колеса при условии минимизации Δω ) можно задать четкий динамический коридор в переходном процессе изменения давления (фиг. 1).
Таким образом, использование сигнала момента реакции дороги является эффективным средством для повышения качества регулирования процесса торможения на дорожном покрытии независимо от уровня коэффициента сцепления.
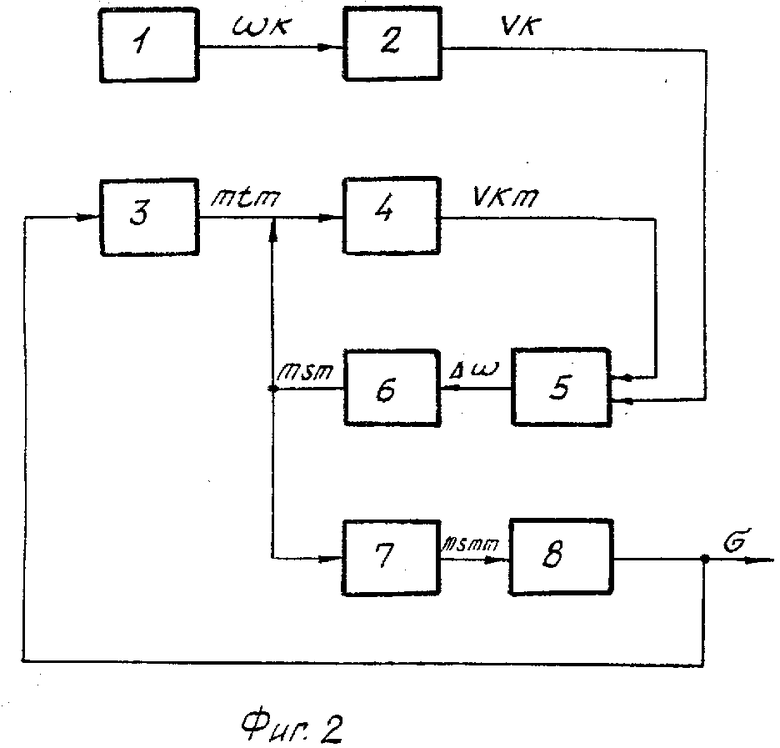
Один из возможных вариантов устройства для реализации предлагаемого способа (фиг. 2) состоит из датчика 1 угловой скорости колеса, блока 2 формирования сигнала окружной скорости vk колеса, блока 3 имитации динамики тормозного момента, блока 4 имитации динамики математического колеса, сумматора 5 с прямым и инверсным входами, блока 6 минимизации разностного сигнала Δω= ωk-ωkm , фильтра 7 и блока 8 формирования командных сигналов на модулятор.
Устройство работает следующим образом. В процессе торможения непрерывно с помощью блоков 1 и 2 формируют сигнал текущей скорости колеса vk, а с помощью блока 3 - сигнал текущего имитированного тормозного момента mtm. В блоке 4 имитируют динамику математического колеса согласно соотношению
vkm=  rkp·dt
rkp·dt
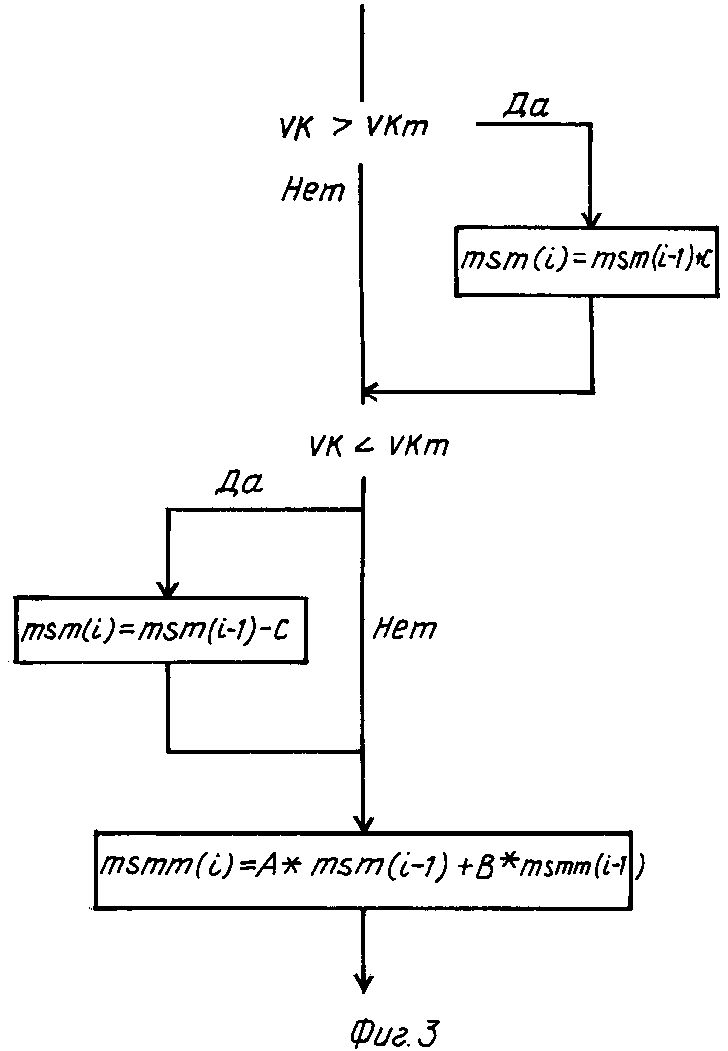
На прямой вход сумматора 5 подают сигнал действительной скорости vk колеса, а к инверсному входу - сигнал скорости vkm математического колеса. При этом в блоке 6 происходит минимизация разностного сигнала vk - vkm. Одним из возможных способов такой минимизации является увеличение по линейному закону сигнала msm при vk-vkm > 0 и его снижение по линейному закону при vk - vkm < 0 (фиг. 3). В результате этого на выходе блока 6 формируют пилообразный сигнал msm, среднее значение которого пропорционально моменту реакции дороги, а скорость математического колеса подстраивают под действительную скорость колеса. Начальное значение msm в момент начала торможения задают равным расчетному значению момента реакции дороги для низшего значения коэффициента сцепления колеса с дорогой, после окончания торможения восстанавливается указанное значение msm. Пилообразный сигнал msm пропускают через фильтр 7 высоких частот и подают на вход блока 8, который формирует командный сигнал 6, управляющий модулятором.
| название | год | авторы | номер документа |
|---|---|---|---|
| АНТИБЛОКИРОВОЧНАЯ СИСТЕМА УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ АВТОМОБИЛЯ | 1992 |
|
RU2011578C1 |
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| Способ управления торможением транспортного средства и устройство для его осуществления | 2022 |
|
RU2819157C1 |
| РОЛИКОВЫЙ СТЕНД ДЛЯ ИСПЫТАНИЙ АВТОМОБИЛЕЙ | 1995 |
|
RU2090854C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМОВ ДВИЖЕНИЯ МОБИЛЬНЫХ МАШИН | 1997 |
|
RU2125517C1 |
| Способ управления переходным процессом качения колеса автомобиля | 1978 |
|
SU787218A1 |
| СПОСОБ И УСТРОЙСТВО ПАРИРОВАНИЯ ЮЗОВАНИЯ КОЛЕСНЫХ ПАР РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2002 |
|
RU2292277C2 |
| СПОСОБЫ ДИАГНОСТИРОВАНИЯ ТОРМОЗНОЙ СИСТЕМЫ АВТОМОБИЛЯ, ОБОРУДОВАННОГО АНТИБЛОКИРОВОЧНОЙ СИСТЕМОЙ (ВАРИАНТЫ), СПОСОБ ДИАГНОСТИРОВАНИЯ ТОРМОЗНОЙ СИСТЕМЫ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБОВ | 2005 |
|
RU2297932C1 |
| СПОСОБ ТОРМОЖЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА (ВАРИАНТЫ) | 2005 |
|
RU2304531C2 |
| АНТИБЛОКИРОВОЧНОЕ УСТРОЙСТВО ТОРМОЗНОЙ СИСТЕМЫ АВТОМОБИЛЯ | 2007 |
|
RU2351491C1 |
Использование: в антиблокировочных системах торможения автомобиля. Сущность изобретения: способ включает измерение угловой скорости вращения колеса автомобиля, имитацию динамики тормозного механизма и имитацию динамики математического колеса. При этом формируется разностный сигнал, равный разности сигналов действительной угловой скорости колеса и угловой скорости математического колеса, в результате чего формируется пилообразный сигнал момента реакции дороги, сформированный сигнал фильтруется и используется для формирования сигналов управления модулятором. 1 з. п. ф-лы, 3 ил.
ωkm=  dt, ,
dt, ,
где ωкт - сигнал имитированной скорости колеса;
mtm, mSm - соответственно сигналы имитированного тормозного момента и момента реакции дороги;
jкр - расчетный момент инерции колеса,
а путем минимизации разностного сигнала получают сигнал момента реакции дороги и фильтруют его высокочастотным фильтром.
