Предлагаемое изобретение относится к области транспорта и транспортного машиностроения, а именно: антиблокировочным системам и системам курсовой устойчивости автотранспортных средств и к способам и устройствам управления данными системами, и может найти применение в способах управления тормозными системами грузовых автомобилей, автобусов, прицепов и других мобильных средств.
В настоящее время остро стоит проблема оснащения современных транспортных средств антиблокировочными системами и системами курсовой устойчивости автотранспортных средств, гарантирующими при экстренном торможении транспортного средства, сохранение тормозных свойств и управляемости транспортного средства.
Известен способ управления антиблокировочной системой транспортного средства, включающий вычисление производной по времени функции квадрата сигнала датчика скорости вращения колеса, подачу электрического сигнала, пропорционального производной, в экстремальный регулятор, нахождение экстремума сигнала, соответствующего экстремуму тормозной или тяговой мощности на колесе и максимальному сцеплению колеса с опорной поверхностью, поддержание текущего значения сигнала вблизи экстремума, формирование и подачу при отклонении сигнала от экстремума больше установленной величины по сигналам экстремального регулятора управляющие сигналы на модулятор давления тормозного привода или на устройства регулирования крутящего момента и уменьшение или увеличение давления в тормозном приводе или крутящем моменте колеса. Экстремум сигнала находят по методу запоминания экстремума или по приращению сигнала. Управление торможением или тяговым режимом осуществляют раздельно для каждого колеса или для группы колес блоком управления антиблокировочной системой, объединенным с модулятором давления в один узел и подключенным к датчику скорости вращения колеса [1].
К недостаткам известного способа управления антиблокировочной системой транспортного средства в процессе торможения или тягового режима можно отнести то, что экстремум функции определяют по вычислению производной по времени. Кроме того, антиблокировочная система или противобуксовочная система работают автономно и оптимальны по коэффициентам сцепления каждого колеса. Однако коэффициенты сцепления каждого колеса отличаются друг от друга, углы увода и поворота управляемых колес по одной оси не равны друг другу, а касательные реакции, действующие на правое и левое колесо одной оси, не одинаковы (в том числе и в случае создания стабилизирующих воздействий за счет изменения крутящих моментов на ведущих колесах). Это приводит к появлению боковых сил. Также в случае действия боковой силы, приложенной в центре тяжести транспортного средства с любым типом привода и схемой рулевого управления, транспортное средство начинает совершать криволинейное движение, несмотря на то, что угол поворота управляемых колес равен нулю [2].
Наиболее близким к заявляемому способу по своей технической сути (прототипом) является способ управления антиблокировочной системой и системой курсовой устойчивости транспортного средства, включающий обработку в режиме экстренного торможения транспортного средства электрических сигналов, характеризующих динамику транспортного средства, в том числе угловые скорости вращения колес транспортного средства вокруг продольной и поперечной осей, характеризующие тангенциальное и радиальное ускорения колес, вычисление параметров, характеризующих сцепление колес с опорной поверхностью, нахождение экстремума функции текущих коэффициентов сцепления, в соответствии с которым уменьшают или увеличивают давление в тормозном приводе колес раздельно для каждого колеса или группы колес посредством электронного блока управления антиблокировочной системы транспортного средства, из условия одновременного исключения их проскальзывания по состоянию их углового рассогласования и отрыва от опорной поверхности по состоянию угла наклона поперечной оси транспортного средства с заданным запасом по углу отрыва, задание экстремума сигнала, характеризующего динамику колес, и сбрасывание тяги двигателя транспортного средства до прихода упомянутых систем контроля движения в исходное положение [3].
Однако, известный способ управления антиблокировочной системой и системой курсовой устойчивости транспортного средства не обеспечивает должную управляемость и сохранение тормозных свойств транспортного средства. Этот способ является помехонеустойчивым, поскольку при расчете производных используется операция дифференцирования.
Новым достигаемым техническим результатом предлагаемого изобретения является автоматическое нахождение оптимальных величин проскальзывания колес при экстренном торможении в результате колебательного режима работы антиблокировочной системы, гарантирующее сохранение тормозных свойств и управляемости транспортного средства, а также улучшение курсовой устойчивости транспортного средства путем контроля межбортовой разности средних величин угловых скоростей колес и контролем за их ускорением.
Этот технический результат достигается тем, что в способе управления антиблокировочной системой и системой курсовой устойчивости транспортного средства, включающем обработку в режиме экстренного торможения транспортного средства электрических сигналов, характеризующих динамику колес транспортного средства, в том числе угловые скорости вращения колес транспортного средства вокруг продольной и поперечной осей, характеризующие тангенциальное и радиальное ускорения колес, вычисление текущих коэффициентов сцепления, характеризующих сцепление колес с опорной поверхностью, уменьшение или увеличение давления в тормозном механизме колес раздельно для каждого колеса или группы колес посредством электронного блока управления антиблокировочной системой в зависимости от величины проскальзывания каждого колеса, задание электрического сигнала, характеризующего динамику колес транспортного средства, в отличие от прототипа, процесс управления тормозными механизмами антиблокировочной системы, а также динамика колес имеют колебательный характер, величину проскальзывания каждого колеса формируют по сигналу, представляющему собой приведенную к опорной скорости транспортного средства величину разности между скоростью каждого колеса и опорной скоростью транспортного средства, а опорную скорость получают в виде разности между максимальным или минимальным значениями скоростей соответствующих колес и опорной скоростью транспортного средства, модуль которой в качестве аргумента вводят в таблицу максимально достижимых для данного транспортного средства ускорений угловых скоростей колес, восстанавливают по знаку разности величину этого ускорения, интегрируют полученную величину, и полученное значение задают в качестве опорной скорости транспортного средства, при этом в управляющий сигнал на растормаживание для стабилизации курсовой устойчивости добавляют составляющие, пропорциональные модулю разности межбортовых средних ускорений угловых скоростей колес, совпадающих по знаку с соответствующими межбортовыми разностями угловых скоростей колес, а для создания демпфирующего момента и одновременного задания темпа замедления для разных величин проскальзывания колес транспортного средства и уменьшающего колебательность процесса в тормозных механизмах колес добавляют составляющие, пропорциональные производной от угловых скоростей колес.
Уменьшение давления для самых низких коэффициентов сцепления могут осуществлять с частотой до 4 Гц.
Известно устройство управления антиблокировочной системой и системой курсовой устойчивости транспортного средства с прицепом в колеса прицепа, содержащее колесные модули, установленные на ободе колес, датчик ускорения, соединенный с соответствующим вращающимся колесом, передатчик для беспроводной передачи информационного сигнала с датчика ускорения о радиальном и касательном ускорении колеса в блок управления антиблокировочной системой и системой курсовой устойчивости транспортного средства, систему электронного контроля устойчивости для транспортного средства, включающую навигационную систему (систему позиционирования), измеряющую параметры (скорость и координаты) движения транспортного средства, электронный блок управления, запрограммированный на уменьшение бокового заноса транспортного средства путем уменьшения разницы между предполагаемым направлением транспортного средства и/или скоростью рыскания и фактическим направлением транспортного средства и/или скоростью рыскания путем внесения изменений в работу тормозов транспортного средства и/или блока управления двигателем, при этом системы электронного контроля устойчивости получает входные данные от датчиков скорости вращения колес, датчика положения рулевого колеса, датчика скорости рыскания и датчика поперечного ускорения, получает ввод, указывающий, по крайней мере, свойство дороги, на которой находится транспортное средство, причем дорога, на которой находится транспортное средство, определяется из системы позиционирования, использующей базу данных карт, а свойства дороги определяются из карты базы данных [4].
Недостатком данного устройства является то, что используемая беспроводная передачи информационного сигнала подвержена сбоям в работе из-за внешних электромагнитных воздействий. Кроме этого, для работы колесного модуля требуется сложная беспроводная система с электрическим питанием.
Наиболее близким к заявляемому устройству по своей технической сути (прототипом) является устройство управления антиблокировочной системой и системой курсовой устойчивости транспортного средства, содержащее датчики угловой скорости колес, подключенные к электронному блоку управления с микропроцессором, модулятор давления тормозного механизма каждого колеса и блок управления двигателем, микромеханический бесплатформенный инерциальный блок, датчик угла поворота рулевого колеса и блок дифференциальных клапанов на ведущей и передней осях, узел контроля и блок ключей, причем микромеханический бесплатформенный инерциальный блок подключен к первому входу микропроцессора, ко второму входу которого подключены датчики угловой скорости колес, к его третьему входу подключен датчик угла поворота рулевого колеса, к первому выходу - узел контроля, ко второму выходу - блок ключей, а к третьему - блок управления двигателем, первый выход блока ключей подключен к модулятору давления тормозного привода каждого колеса, второй выход - ко второму входу узла контроля, третий выход - к блоку дифференциальных клапанов на ведущей и передней осях, второй вход которого подключен к выходу модулятора давления тормозного привода каждого колеса, второй выход модулятора давления тормозного привода каждого колеса подключен к третьему входу узла контроля электронного блока управления, а третий - соединен с тормозными камерами каждого колеса [3].
Однако, известное устройство управления антиблокировочной системой и системой курсовой устойчивости транспортного средства не обеспечивает должную управляемость и сохранение тормозных свойств транспортного средства при отсутствии блока инерциальной навигации.
Технический результат - автоматическое нахождение оптимальных величин проскальзывания колес при экстренном торможении, гарантирующих сохранение тормозных свойств и управляемости транспортного средства, путем контроля межбортовой разности средних величин угловых скоростей колес и контролем за их ускорением - достигается также тем, что в устройство управления антиблокировочной системой и системой курсовой устойчивости транспортного средства, содержащем датчики угловой скорости колес, электронный блок управления с микропроцессором, подключенный входом к датчикам угловой скорости колес, модулятор давления тормозного механизма каждого колеса, блок управления двигателем, тормозные камеры каждого колеса, клапаны и передние оси, в отличие от прототипа, дополнительно введены преобразователь «аналог-код», соединенный входом с датчиками колес, а выходом - с дискретными фильтрами частот неподрессоренной части подвески транспортного средства, блок расчета опорной скорости транспортного средства, электронный блок управления с микропроцессором выполнен электронно-вычислительным с возможностью вычисления угловых ускорений колес, межбортовых средних скоростей и ускорений колес, максимальных и минимальных величин скорости колес для блока расчета опорной скорости транспортного средства, индивидуальных проскальзываний колес, с возможностью формирования значений требуемых ускорений в функции индивидуальных проскальзываний колес и фактических ускорений колес посредством дополнительно введенной в электронно-вычислительный блок управления программы и с возможностью вычисления управляющих сигналов на клапаны антиблокировочной системы.
Способ управления антиблокировочной системой и системой курсовой устойчивости транспортного средства реализуют следующим образом.
Предлагаемая антиблокировочная система основана на модуляции (уменьшении или увеличении) давления в тормозных механизмах транспортного средства и обеспечивает возможность реализации трех режимов работы тормозных механизмов транспортного средства:
1) режим беспрепятственного торможения;
2) режим сохранения давления в тормозных механизмах;
3) режим уменьшения (сброса) давления в тормозных механизмах.
В результате экстренного торможения возможно развитие следующих ситуаций:
1) для низких коэффициентов сцепления величина проскальзывания каждого колеса транспортного средства такова, что формируется управляющий сигнал, который после увеличения давления в тормозных механизмах переходит в режим уменьшения (сброса) давления в тормозных механизмах и осуществляет растормаживание. Одновременно сигнал о проскальзывании SA колес транспортного средства выходит за пределы максимальных торможений и формирует величину торможения, соответствующую низкому коэффициенту сцепления, в результате чего возникает динамический процесс, имеющий колебательный характер и охватывающий все три режима работы тормозных механизмов транспортного средства, то есть последовательно формируются управляющие сигналы на торможение, сохранение давления в тормозных механизмах и уменьшение (сброс) давления с частой до 4 Гц для самых низких коэффициентов сцепления.
Реализация такого режима торможения приводит в среднем к получению максимальной величины замедления, но никак не отражается на комфортности торможения;
2) для высоких коэффициентов сцепления предлагаемый способ управления практически в одну итерацию выходит в результате динамического равновесия управляющих сигналов на торможение и растормаживание, обеспечивая максимальный коэффициент сцепления;
3) для промежуточных коэффициентов сцепления (мокрые бетон, асфальт, микст и т.п.) предлагаемый способ управления обеспечивает равенство сигналов на торможение и растормаживание с частотой проверки состояния антиблокировочной системы, соответствующей данной подстилающей поверхности и соответствующей амплитудой переходного процесса по давлению в тормозных механизмах.
В режиме экстренного торможения транспортного средства в зависимости от величины проскальзывания каждого колеса посредством электронного блока управления антиблокировочной системой транспортного средства обрабатывают электрические сигналы, характеризующие имеющую колебательный характер динамику колес транспортного средства, в том числе угловые скорости вращения колес транспортного средства вокруг продольной и поперечной осей, характеризующие тангенциальное и радиальное ускорения колес.
Динамика колес транспортного средства имеет колебательный характер проверки состояния динамики колес транспортного средства в результате взаимодействия контура проскальзываний и опорной скоростью транспортного средства.
По результатам обработки данных электрических сигналов посредством электронного блока управления антиблокировочной системой в зависимости от величины проскальзывания каждого колеса вычисляют текущие коэффициенты сцепления, характеризующие сцепление колес с опорной поверхностью и формируют сигнал проскальзывания каждого колеса, представляющий собой приведенную к опорной скорости транспортного средства величину разности между значением скоростей соответствующих колес и опорной скоростью транспортного средства, используемый далее при формировании разности проскальзывания колес и программных значений SПP, а также для определения программных значений требуемых ускорений  , как представлено на фиг. 1.
, как представлено на фиг. 1.
Здесь  - среднее значение ускорения транспортного средства; VK - максимальное или минимальное значение скорости транспортного средства; ΔVa - вариация опорной скорости транспортного средства; Sa - усредненное проскальзывание транспортного средства;
- среднее значение ускорения транспортного средства; VK - максимальное или минимальное значение скорости транспортного средства; ΔVa - вариация опорной скорости транспортного средства; Sa - усредненное проскальзывание транспортного средства;  - МОдуль усредненного проскальзывания;
- МОдуль усредненного проскальзывания;  - выбор таблицы для ускорения или замедления транспортного средства;
- выбор таблицы для ускорения или замедления транспортного средства;  - ускорение транспортного средства; Va - опорная скорость транспортного средства).
- ускорение транспортного средства; Va - опорная скорость транспортного средства).
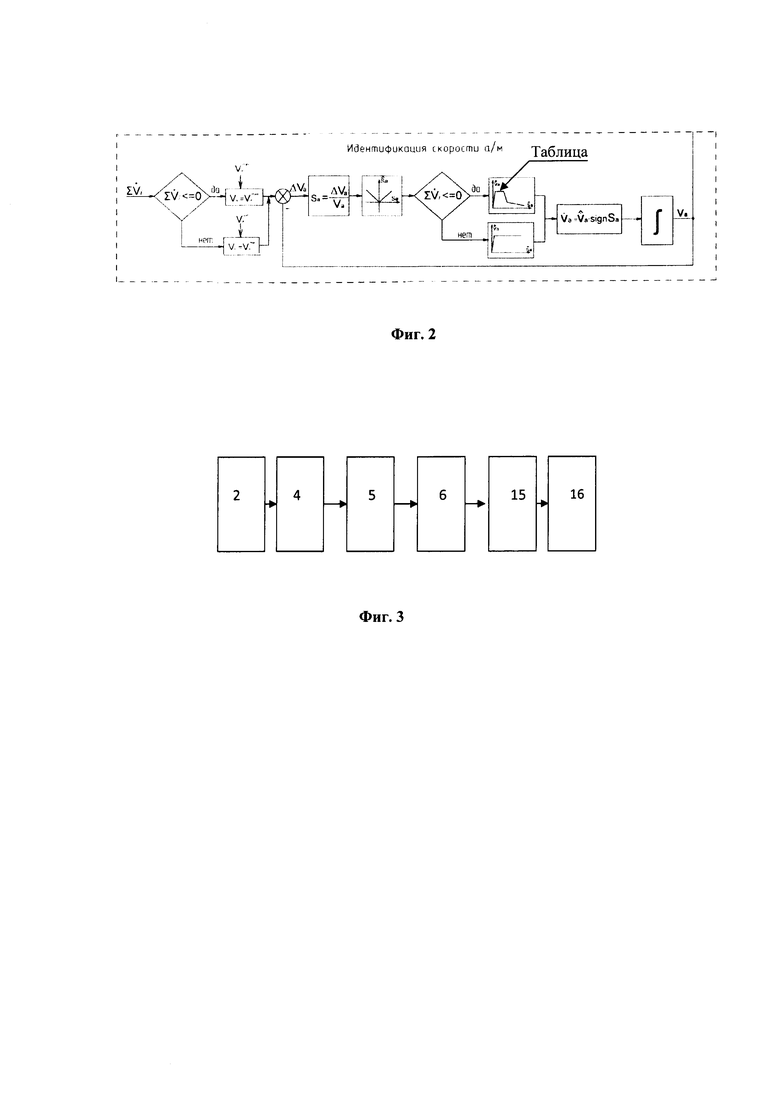
Для расчета параметров на фиг. 2 используют вычислительные операции из выражений (1) и (2)

где  - угловые ускорения колес, приведенные к линейным величинам;
- угловые ускорения колес, приведенные к линейным величинам;
Vi - угловые скорости колес, приведенные к линейным величинам;
a0, b0 - коэффициенты фильтра частот неподрессоренной части подвески транспортного средства.

где VК - максимальное или минимальное значение скорости колес;
Va - опорная скорость транспортного средства;
Sa - обобщенное проскальзывание транспортного средства.
Таблица максимально достижимых для транспортного средства торможений имеет вид резко нарастающей величины торможения на малых приращениях SA (0<SA<0,04), плоскую вершину на уровне этой максимальной величины, затем резкий спад при (SA>0,175), как показано на фиг. 2.
Для формирования опорной скорости транспортного средства вычисляют величину разности между максимальной или минимальной скоростями колес и опорной скоростью транспортного средства, приводят эту величину к опорной скорости транспортного средства, берут модуль от этой величины, вводят этот модуль в таблицу максимальных значений ускорений, достижимых для этого транспортного средства, восстанавливают по знаку величине разности ΔV, интегрируют это ускорение и полученную скорость принимают в качестве опорной скорости транспортного средства.
Для стабилизации курсовой устойчивости в управляющий сигнал на растормаживание добавляют составляющую, пропорциональную модулю разности межбортовых средних ускорений угловых скоростей колес и совпадающую по знаку с соответствующими межбортовыми средними разностями угловых скоростей колес.
Для улучшения стабилизации рабочей точки в режиме торможения в контуре проскальзывания вводится программное значение SПP; определяющее разницу между проскальзыванием колес и этим программным значением SПP.
Для уменьшения колебательности процесса в тормозные механизмы добавляют в управляющий сигнал на растормаживание для создания демпфирующего момента и одновременно задающего темп замедления для разных величин Si проскальзывания колес транспортного средства и уменьшающего колебательность процесса в тормозных механизмах, составляющую, пропорциональную производной от угловых скоростей колес, а именно: для малых величин проскальзывания колес транспортного средства - большую величину торможения, для больших величин проскальзывания колес транспортного средства - меньшую величину задаваемого торможения.
Устройство управления антиблокировочной системой и системой курсовой устойчивости транспортного средства работает следующим образом.
Конкретный вид устройства управления антиблокировочной системой и системой курсовой устойчивости транспортного средства представлен на фиг. 1, где Ф - фильтры 1 частот неподрессоренной части; Vi - угловые скорости колес 2, приведенные к линейным скоростям [м/с];  - угловые ускорения колес 2, приведенные к линейным ускорениям [м/с2];
- угловые ускорения колес 2, приведенные к линейным ускорениям [м/с2];  - бортовые средние скорости колес 2 [м/с];
- бортовые средние скорости колес 2 [м/с];  - бортовые средние ускорения колес 2 [м/с2]; ΔV - межбортовая разница скоростей; ΔV& - межбортовая разница ускорений; КбС - коэффициент усиления в тракте курсовой устойчивости, безразмерный;
- бортовые средние ускорения колес 2 [м/с2]; ΔV - межбортовая разница скоростей; ΔV& - межбортовая разница ускорений; КбС - коэффициент усиления в тракте курсовой устойчивости, безразмерный;  - сигналы управления в тракте курсовой устойчивости (безразмерные),
- сигналы управления в тракте курсовой устойчивости (безразмерные),  - программы требуемых ускорений в функции проскальзываний [м/с2]; КТ - коэффициент усиления в тракте ускорения, безразмерный;
- программы требуемых ускорений в функции проскальзываний [м/с2]; КТ - коэффициент усиления в тракте ускорения, безразмерный;  - максимальная и минимальная скорости колес 2; Va - опорная скорость транспортного средства; Si - индивидуальные проскальзывания колес 2; SПP - программное значение в контуре проскальзывания; KS - коэффициент усиления в контуре проскальзывания; δSi - управляющий сигнал в контуре проскальзывания; δТ - управляющий сигнал в контуре растормаживания; δi - управляющий сигнал на клапаны 3 антиблокировочной системы.
- максимальная и минимальная скорости колес 2; Va - опорная скорость транспортного средства; Si - индивидуальные проскальзывания колес 2; SПP - программное значение в контуре проскальзывания; KS - коэффициент усиления в контуре проскальзывания; δSi - управляющий сигнал в контуре проскальзывания; δТ - управляющий сигнал в контуре растормаживания; δi - управляющий сигнал на клапаны 3 антиблокировочной системы.
Сигналы с датчиков 4 угловой скорости колес 2 поступают на преобразователь 5 «аналог-код» и в дискретном виде вводятся в электронно-вычислительный блок управления 6, далее поступают на дискретные фильтры 1 частот неподрессоренной части подвески транспортного средства. После чего вычисляются угловые ускорения колес 2, вычисляются межбортовые ускорения 7 и средние скорости 8 колес 2, домножаются на коэффициенты усиления в тракте курсовой устойчивости 9, вычисляются максимальные и минимальные величины 10 скорости колес 2 для блока расчета опорной скорости транспортного средства, вычисляются индивидуальные проскальзывания 11 колес 3, посредством компьютерной программы 12 формируют программные значения 13 требуемых ускорений (коэффициенты усиления в контуре проскальзывания) в функции индивидуальных проскальзываний 11 колес 2 и вычисляют управляющие сигналы 14 на клапаны 3 антиблокировочной системы.
При беспрепятственном торможении нормально открытые клапаны 3 открыты, нормально закрытые клапаны 3 - закрыты, в режиме сохранения нормально открытые клапаны 3 закрываются, в режиме растормаживания - дополнительно открываются нормально закрытые клапаны 3.
Устройство управления антиблокировочной системой и системой курсовой устойчивости транспортного средства содержит преобразователь 5 «аналог-код», соединенный входом с датчиками 4 угловой скорости колес 2, а выходом - с дискретными фильтрами 1 частот неподрессоренной части транспортного средства, модулятор давления 15 тормозного механизма каждого колеса 2, тормозные камеры 16 каждого колеса 2, электронно-вычислительный блок управления 6, подключенный входом к датчикам 4 угловой скорости колес 2, с возможностью вычисления угловых ускорений 3 колес 2, межбортовых ускорений и средних скоростей 7, 8 колес 2, максимальных и минимальных величин скорости 10 колес 2 для блока расчета опорной скорости транспортного средства, индивидуальных проскальзываний 11 колес 2, с возможностью формирования значений требуемых ускорений в функции индивидуальных проскальзываний 11 колес 2 и фактических ускорений 3 колес 2 посредством компьютерной программы 12 в электронно-вычислительном блоке управления бис возможностью вычисления управляющих сигналов на клапаны 3 антиблокировочной системы (фиг. 1 и фиг. 3).
Преобразователь 5 «аналог-код» предназначен для формирования количества импульсов, обратно пропорциональных скорости транспортного средства.
В качестве преобразователя 5 «аналог-код» может быть использован механизм «capture-compare», например, в интегрированном модуляторе МК 25 фирмы «Teves».
Датчики 4 угловой скорости предназначены для формирования и регистрации величин угловых скоростей.
В качестве датчиков 4 угловой скорости могут быть использованы датчики Холла и зубчатая нарезка индуктора.
Тормозные камеры 16 тормозного механизма предназначены для создания и поддержания требуемых величин давления.
В качестве тормозных камер 16 могут быть использованы штатные тормозные камеры транспортного средства, например, автомобиля «Лада» 2112.
Передние оси 17 предназначены для создания тормозных моментов, так как 70-80% тормозных усилий создаются тормозными механизмами передних колес 2.
В качестве передних осей 17 могут быть использованы ведущие оси транспортного средства, так как в колесной формуле 4×2 как правило передние оси 17 являются ведущими.
Для повышения курсовой устойчивости на транспортных средствах без антиблокировочной системы и системы курсовой устойчивости транспортного средства устанавливают регулятор тормозных усилий тормозных механизмов задней оси, который фактически является редуктором, снижающим давление в тормозных камерах 16 тормозных механизмов.
На транспортных средствах с антиблокировочной системой и системой курсовой устойчивости транспортного средства эту функцию выполняет алгоритм путем подбора соответствующих параметров для передней 17 и задней осей.
Электронно-вычислительный блок управления 6 предназначен для вычисления сигналов на модулятор давления.
В качестве электронно-вычислительного блока управления 6 может быть использован соответствующий микропроцессор с необходимой обвязкой, например, микропроцессор 8086 фирмы «Intel».
Клапаны 3 антиблокировочной системы предназначены для реализации режимов сохранения и растормаживания.
В качестве клапанов 3 антиблокировочной системы могут быть использованы электромагнитные исполнительные устройства, например, дроссельные или золотниковые устройства для гидравлических тормозных механизмов и мембранные устройства для пневматических тормозных механизмов.
Модулятор давления 15 тормозного механизма предназначен для формирования требуемых значений давления в тормозных камерах 16 тормозного механизма.
В качестве модулятора давления 15 тормозного механизма может быть использовано пневматическое, например, фирмы «Vabco», или гидравлическое электромагнитное устройство, например, фирмы «Bosch».
Блок расчета опорной скорости транспортного средства предназначен для формирования скорости транспортного средства без использования акселерометров.
Блок расчета опорной скорости транспортного средства представляет собой расчетную таблицу максимальных ускорений транспортного средства при разгоне или торможении.
Компьютерная программа 12 предназначена для вычисления величин проскальзывания колес, формирования программных значений 13 требуемых ускорений в функции индивидуальных проскальзываний 11 колес 2 и величин растормаживающего сигнала в контуре боковой стабилизации, вычисления управляющих сигналов на клапаны 3 антиблокировочной системы.
Фрагмент реальной компьютерной программы 12, которые реализуют механизм опроса датчиков 4 угловой скорости колес 2 по механизму «capture - compare» и фильтрации частот неподрессоренной части подвески транспортного средства, написанной в рамках реализации предлагаемого технического решения представлена ниже:


На основании вышеизложенного новый достигаемый технический результат предлагаемого изобретения обеспечивается следующими по сравнению с прототипом техническими преимуществами.
1. Реализация требований к тормозной системе и системе курсовой устойчивости выполняется без использования бортовой инерциальной навигационной системы. Колебательный режим работы антиблокировочной системы обеспечивает максимальные значения коэффициентов сцепления колес 2 с опорной поверхностью.
2. Достигается повышение стабилизации оптимальных величин проскальзывания колес 2 при экстренном торможении транспортного средства не менее чем на 20%, что гарантирует сохранение тормозных свойств и управляемости транспортного средства.
3. Достигается повышение не менее чем на 30% стабилизации курсовой устойчивости транспортного средства за счет добавления в управляющий сигнал на растормаживание составляющую, пропорциональную модулю разности межбортовых средних ускорений угловых скоростей колес 2, совпадающих по знаку с угловыми средними межбортовыми скоростями.
4. Достигается уменьшение не менее чем на 10% колебательности процесса в тормозных механизмах за счет добавления в управляющий сигнал на растормаживание демпфирующего момента, а также задание темпа замедления для разных величин проскальзываний путем добавления составляющей, пропорциональной производной от угловых скоростей колес 2.
В настоящее время в ООО «НПЦ СПЕЦОСНАЩЕНИЕ МО» проведены испытания предлагаемого способа управления антиблокировочной системой и системой курсовой устойчивости транспортного средства, и на их основе выпущены конструкторская и технологическая документация.
Используемые источники
1. Патент RU №2324611, 2008, МКИ В60Т 8/00, В60Т 8/32.
2. Жилейкин М.М. Теоретические основы повышения показателей устойчивости и управляемости колесных машин на базе нечеткой логики. М: Издательство МГТУ им. Н.Э. Баумана. 2016. 238 с.
3. Патент RU №2751471, 2021, МКИ В60Т 8/00.
4. Заявка на изобретение US 2019322256, 2019, МКИ В60Т 8/00.

Группа изобретений относится к способу и устройству управления торможением транспортного средства. Способ включает: обработку сигналов в режиме экстренного торможения, вычисление коэффициентов сцепления, уменьшение или увеличение давления в тормозном механизме, задание сигнала, характеризующего динамику колес. В управляющий сигнал на растормаживание для стабилизации курсовой устойчивости добавляют составляющие, пропорциональные модулю разности межбортовых средних ускорений угловых скоростей колес, совпадающих по знаку с соответствующими межбортовыми разностями угловых скоростей колес. Для создания демпфирующего момента и темпа замедления для разных величин проскальзывания колес и уменьшающего колебательность процесса в тормозных механизмах колес добавляют составляющие, пропорциональные производной от угловых скоростей колес. Достигается нахождение оптимальных величин проскальзывания колес при экстренном торможении. 2 н. и 1 з.п. ф-лы, 3 ил.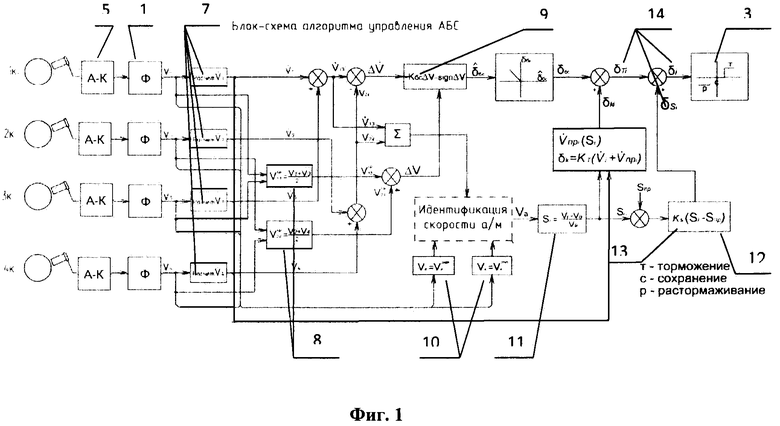
1. Способ управления торможением транспортного средства, включающий обработку в режиме экстренного торможения транспортного средства электрических сигналов, характеризующих динамику колес транспортного средства, в том числе угловые скорости вращения колес транспортного средства вокруг продольной и поперечной осей, характеризующие тангенциальное и радиальное ускорения колес, вычисление текущих коэффициентов сцепления, характеризующих сцепление колес с опорной поверхностью, уменьшение или увеличение давления в тормозном механизме колес раздельно для каждого колеса или группы колес посредством электронного блока управления антиблокировочной системой в зависимости от величины проскальзывания каждого колеса, задание электрического сигнала, характеризующего динамику колес транспортного средства, отличающийся тем, что в режиме экстренного торможения колеса транспортного средства имеют колебательный характер динамики управления антиблокировочной системой, величину проскальзывания каждого колеса формируют по сигналу, представляющему собой приведенную к опорной скорости транспортного средства величину разности между скоростью каждого колеса, а опорную скорость получают в виде разности между максимальным или минимальным значениями скоростей соответствующих колес и опорной скоростью транспортного средства, приведенной к опорной скорости транспортного средства, модуль которой в качестве аргумента вводят в таблицу максимально достижимых для данного транспортного средства ускорений, восстанавливают по знаку разности эту величину этого ускорения, интегрируют эту величину, и полученное значение задают в качестве опорной скорости транспортного средства, при этом в управляющий сигнал на растормаживание для стабилизации курсовой устойчивости добавляют составляющие, пропорциональные модулю разности межбортовых средних ускорений угловых скоростей колес, совпадающих по знаку с соответствующими межбортовыми разностями угловых скоростей колес, а для создания демпфирующего момента и одновременного задания темпа замедления для разных величин проскальзывания колес транспортного средства и уменьшающего колебательность процесса в тормозных механизмах колес добавляют составляющие, пропорциональные производной от угловых скоростей колес.
2. Способ по п. 1, отличающийся тем, что уменьшение давления для самых низких коэффициентов сцепления осуществляют с частотой до 4 Гц.
3. Устройство управления торможением транспортного средства, содержащее датчики угловой скорости колес, электронный блок управления с микропроцессором, подключенный входом к датчикам угловой скорости колес, модулятор давления тормозного механизма каждого колеса, блок управления двигателем, тормозные камеры каждого колеса, клапаны и передние оси, отличающееся тем, что в устройство дополнительно введены преобразователь «аналог-код», соединенный входом с датчиками колес, а выходом - с дискретными фильтрами частот неподрессоренной части подвески транспортного средства, блок расчета опорной скорости транспортного средства, электронный блок управления с микропроцессором выполнен электронно-вычислительным с возможностью вычисления угловых ускорений колес, межбортовых средних скоростей и ускорений колес, максимальных и минимальных величин скорости колес для блока расчета опорной скорости транспортного средства, индивидуальных проскальзываний колес, с возможностью формирования значений требуемых ускорений в функции индивидуальных проскальзываний колес и фактических ускорений колес посредством дополнительно введенной в электронно-вычислительный блок управления компьютерной программы и с возможностью вычисления управляющих сигналов на клапаны антиблокировочной системы.
| Способ управления антиблокировочной системой, противобуксовочной системой и системой курсовой устойчивости транспортного средства и устройство для его осуществления | 2020 |
|
RU2751471C1 |
| Устройство для клепки | 1979 |
|
SU891199A1 |
| Устройство для отображения информации на экране электронно-лучевой трубки | 1977 |
|
SU680007A1 |
| CN 101289084 A, 22.10.2008 | |||
| Гидравлическая головка для контактной сварки | 1937 |
|
SU54344A1 |

