Изобретение относится к ручным тележкам, обеспечивающим возможность подъема и спуска по лестницам, и может быть применено для перемещения груза большой массы (преимущественно до 100 кг) по лестницам, для преодоления препятствий (типа бордюр) в процессе перемещения, а также в качестве инвалидной коляски, медицинской кровати, используемых с сопровождением.
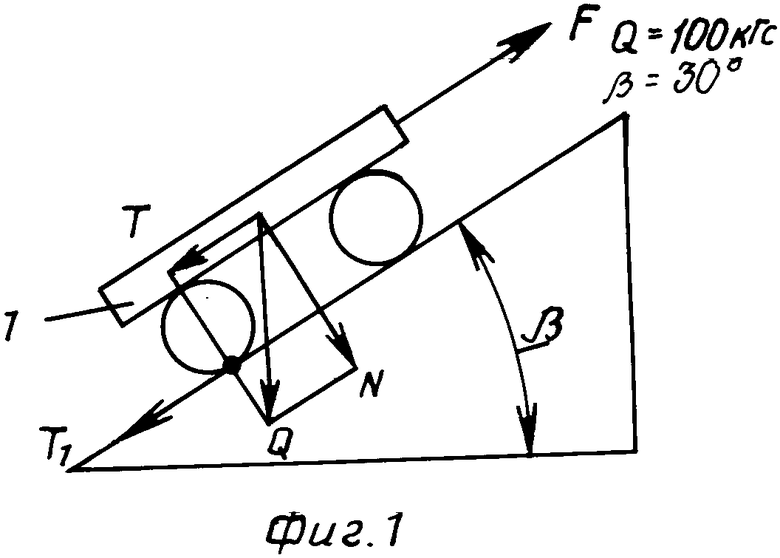
Известны ручные тележки, содержащие колесное шасси с накинутыми на колеса бесконечными ремнями, позволяющие осуществлять транспортировку груза сопровождающим (оператором) по лестницам. Данные технические решения аналогичны случаю перемещения тележки по ровной (без ступени) наклонной плоскости, схема и расчет усилия при которой даны на фиг. 1. Анализ показывает, что при нормальном наклоне лестничного марша ( β= 26-30о) тяговое усилие весьма значительно (более 60 кгс при нагрузке а= 100 кгс), что затрудняет использование указанных конструкций, например в качестве инвалидной коляски, сопровождаемой женщиной, подростком, пожилым человеком.
Известна также конструкция приставки к инвалидной коляске, перемещаемой с помощью тросовой лебедки с анкером и крюками, взаимодействующими с элементами конструкции лестничного ограждения. К достоинству данного технического решения следует отнести малое усилие, необходимое для подъема. Недостатками же являются сложность и металлоемкость конструкции, трудоемкость эксплуатации, большое время подъема и спуска (по данным ТПО "ЭВМ" - около 20 мин требуется для спуска коляски с 3-его этажа жилого дома).
Наиболее прогрессивным решением из числа известных является автотележка фирмы "Медлаборо". Однако сложность конструкции, высокая трудоемкость изготовления и стоимость резко ограничивают ее применение, особенно при индивидуальном использовании (например в качестве инвалидной коляски).
Наиболее близким техническим решением, выбранным в качестве прототипа, является конструкция детской коляски, где колесные оси выполнены с возможностью перемещения в вертикальной плоскости, что повышает проходимость по лестницам. Однако она не устраняет недостатки в части большого тягового усилия, а поэтому ее применение возможно лишь в качестве именно детской коляски при малой грузоподъемности (Q= 10 кгс).
Цель изобретения - повышение проходимости тележки (преимущественно по лестницам и дорожным препятствиям) с минимальным усилием, прилагаемым оператором.
Указанная цель достигается тем, что грузовая платформа содержит две неподвижные оси, на которых с возможностью поворота установлены крестовины, на концах которых смонтированы оси колес. На осях платформы установлен также поворотный рычаг с храповым механизмом, взаимодействующий с крестовиной с возможностью ее поворота вокруг осей платформы. Использование рычага позволяет существенно сократить тяговое усилие.
Указанные конструктивные элементы (поворотные относительно платформы крестовины с колесными осями, поворотный рычаг с храповым механизмом) отсутствуют в прототипе и обеспечивают достижение цели предлагаемого технического решения, следовательно, заявляемое техническое решение соответствует критерию "Новизна".
Анализ известных технических решений в исследуемой области позволяет сделать вывод об отсутствии в них признаков, сходных с существенными отличительными признаками в заявляемой ручной тележке, и признать заявляемое решение соответствующим критерию "Существенные отличия".
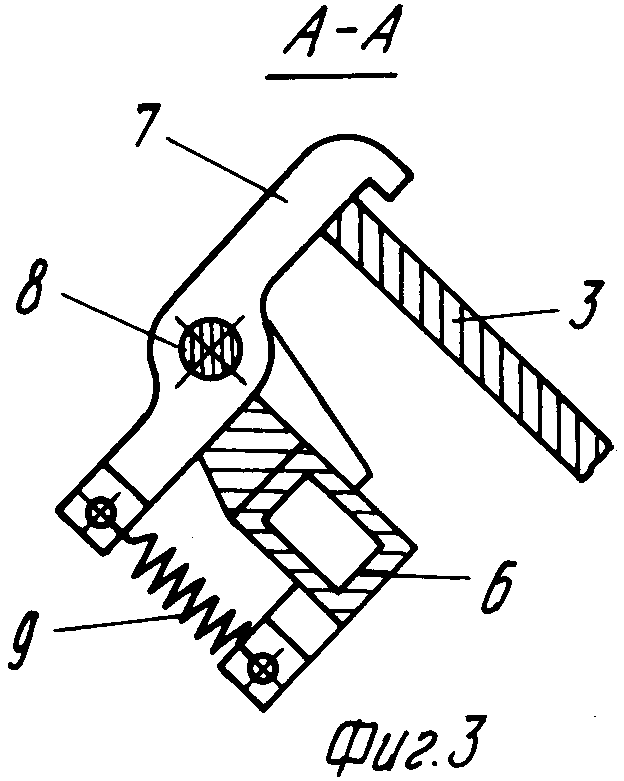
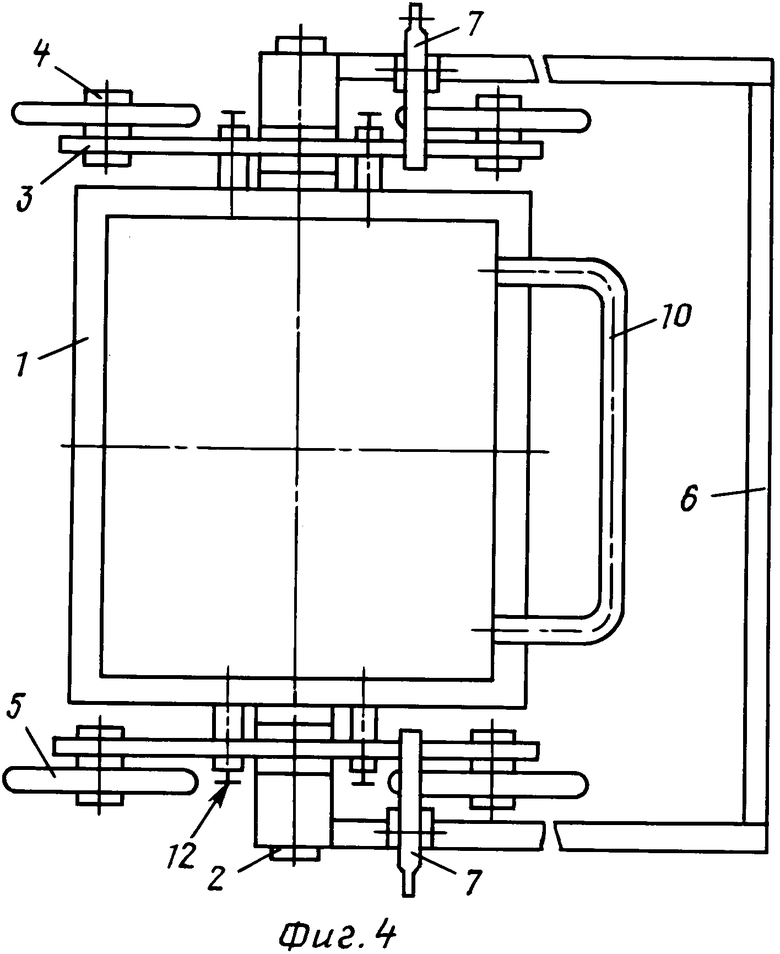
На фиг. 1 дана схема усилия аналогов; на фиг. 2 - тележка, общий вид; на фиг. 3 - сечение А-А на фиг. 2; на фиг. 4 - тележка, вид сверху; на фиг. 5 и 6 - альтернативные варианты исполнения тележки; на фиг. 7 - схема перемещения и действия сил.
Тележка содержит платформу 1 с неподвижно закрепленными на ней осями 2, на которых с возможностью поворота смонтированы крестовины 3, содержащие оси 4 колес 5, и рычаг 6 с храповым механизмом, взаимодействующим с обеими крестовинами и включающим собачки 7, оси 8 и пружины 9. Платформа содержит также рукоятку 10, служащую для перемещения тележки, и откидную колесную опору 11. При перемещении тележки по горизонтальной поверхности платформа удерживается от опрокидывания вокруг собственных осей фиксаторами 12, смонтированными на крестовинах.
Принцип действия тележки следующий. При перемещении по горизонтальной поверхности платформа 1 (фиг. 2) зафиксирована фиксаторами 12 от проворота вокруг собственных осей 2. Груз располагается на платформе симметрично при совмещении центра тяжести с осью 2. Быстросъемный рычаг 6 снят и закреплен на платформе в походном положении. Откидная рукоятка 10 закреплена в рабочем положении (фиг. 2). Откидная подпружиненная колесная опора 11 прижата к платформе снизу. Перемещение тележки осуществляется на двух парах колес 5, находящихся в нижнем положении, при приложении тягового усилия у рукоятке 10.
Для перемещения по лестнице тележка приводится в исходное положение: устанавливается рычаг 6, опора 11 откидывается в положение, указанное на фиг. 2.
Перемещение тележки по наклонной плоскости
Расчет тягового усилия:
F= T+T1;
T= Q sin β - тангенциальная составляющая Q;
T1= N˙ fпр= Qcos β˙ fпр - сила трения; .
fпр = К/rk - приведенный коэффициент трения;
К= 0,1 см - коэффициент трения качения (сталь-резина);
rk= 7,5 см - радиус колеса;
fпр = 0,1/7,5 = 0,014.
F= T+T1= Q(sin β + cos β˙ fпр).
при β = 0 _→ F= 1,4 кгс;
β = 90о _→ F= 100 кгс;
β = 30о _→ F= 62 кгс.
Платформа 1 удерживается в равновесном состоянии (параллельно горизонту) рукояткой 10, что при совмещении ц. т. груза с осью 2 не требует значительных усилий.
При подходе к лестнице (препятствию) ближайшая пара колес упирается в ступеньку. Рычаг 6 движением против часовой стрелки (фиг. 2) поворачивается вокруг оси 2 на угол α, равный угловому расположению колес 5 на крестовине (пунктирное положение рычага 6 на фиг. 2). При этом происходит зацепление собачек 7 с крестовинами 3 в другом положении (угол поворота храпового колеса - крестовины).
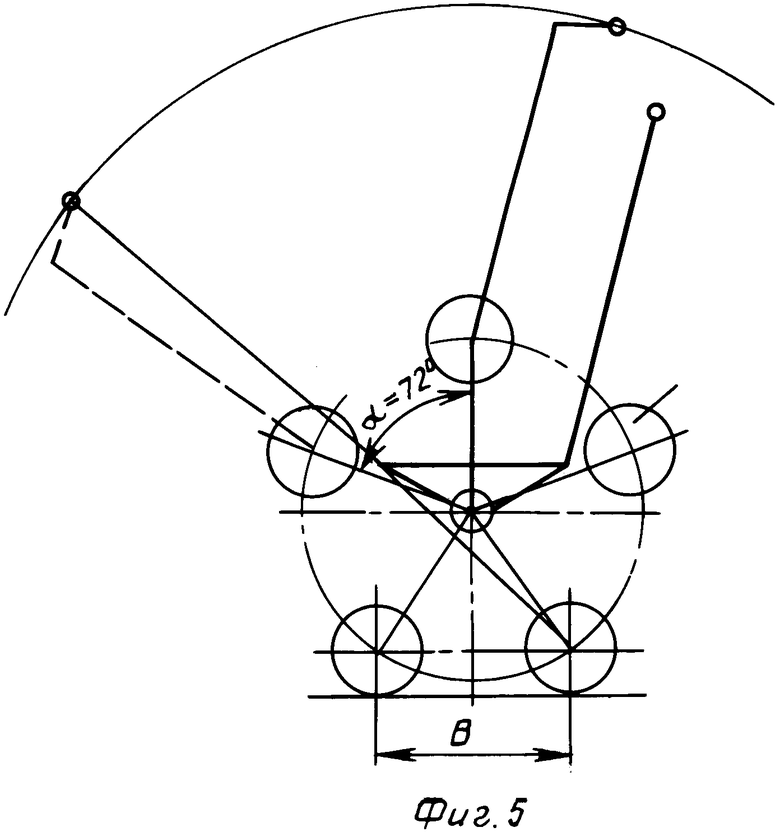
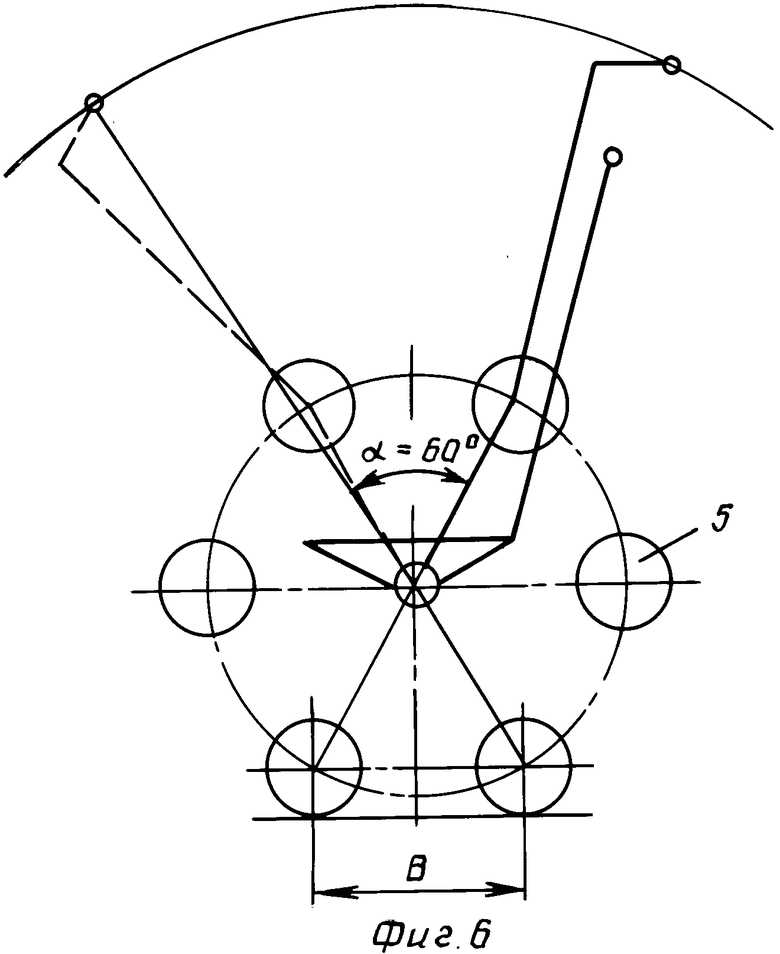
В зависимости от конструкции крестовины угол поворота α может быть 120о - при трех колесах, 90о - при четырех, 72о - при пяти, 60о - при шести и т. д. (фиг. 5,6). При этом одинаковой базе колес (размер В) общие габариты тележки увеличиваются. В качестве примера реализации предлагаемого технического решения принята схема, показанная на фиг. 2 (по 4 колеса на каждой крестовине).
Дальнейшие действия оператора при перемещении тележки по лестнице таковы. Удерживая за рукоятку 10 одной рукой платформу 1 в горизонтальном положении, другой рукой за рычаг 6 (через оси 8 и собачки 7) осуществляется поворот крестовин α вокруг пары колес 5, которые уперлись в ступеньку. Поворот производится на угол по часовой стрелке до тех пор, пока очередная пара колес 5 не соприкоснется со следующей ступенькой (крестовина как бы шагает до ступенькам).
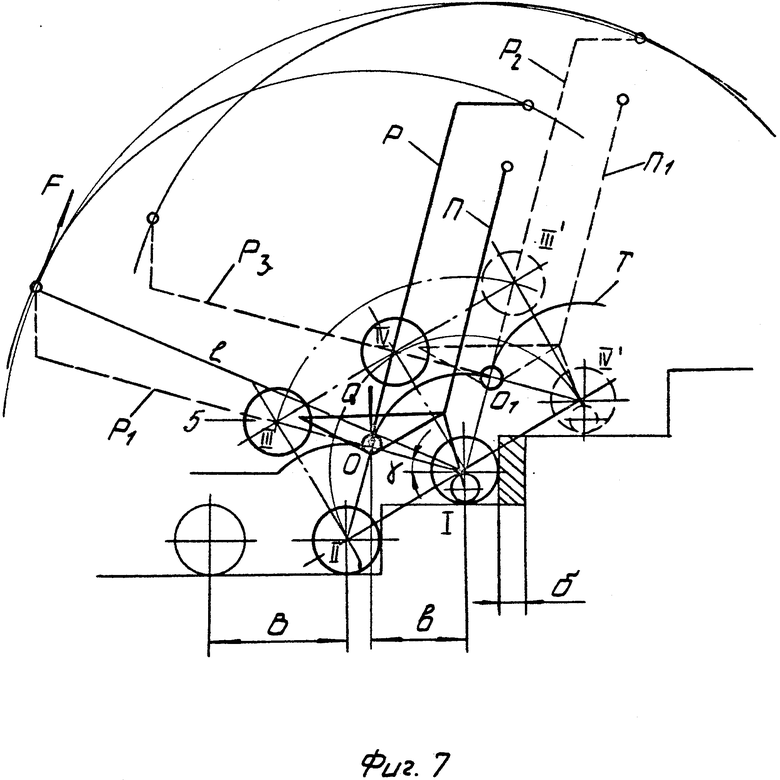
Схематически дальнейший процесс перемещения по лестнице показан на фиг. 7. где линия Т - траектория перемещения оси 2(или центра тяжести груза Q), остальные дуговые линии - траектории перемещений элементов конструкции, F - тяговое усилие, приложенное к рычагу Р (рычаг 6). Рычаг 6 переводится в положение Р1 (зацепление храпового механизма). Усилием F на плече l начинается подъем (за крестовину) колеса П (до момента потери контакта со ступенькой). При этом колесо 1 выбирает зазор б (до упора в следующую ступеньку; на фиг. 7 следующая ступенька условно приближена к колесу 1). При дальнейшем повороте рычага Р из положения Р1 в положение Р2: ось крестовины 0 перемещается в положение 01, рукоятка П - в положение П1, колесо IV - в положение IV1, колесо Ш - в положение Ш1, колесо П - в положение IV.
Условие равенства моментов относительно оси колеса 1:
F˙ l = Q ˙b.
Следовательно F= Q  , где:
, где:
b= rkp ˙cos γ ,
rkp=  - радиус крестовины (для случая 4-колесной крестовины), В - база тележки, γ- угол подъема оси 0 при перемещении в положение O1.
- радиус крестовины (для случая 4-колесной крестовины), В - база тележки, γ- угол подъема оси 0 при перемещении в положение O1.
Для конкретного случая, при В= 300 мм, l= 1200 мм, 0= 100 кгс
при γ= 15о 30 45 60 75 90о и более
F = 17 кгс 15,2 12,5 8,9 4,6 0 - крестовина падает до соприкосновения колеса IV cо ступенькой
Усилие необходимое для перемещения предложенной тележки значительно меньше чем в известных аналогичных конструкциях. В дальнейшем рычаг Р из положения Р2 поворачивают в положение Р3, и перемещение по лестнице продолжается.
В случае остановки на лестничном марше используется опора 11 (на фиг. 7 в положениях 1 и IV1 - окружность малого диаметра).
Спуск тележки по лестнице осуществляется также в положении, когда рукоятка 10 находится впереди - по ходу движения. При спуске ввиду того, что угол γ при незначительном повороте (на 5-15о в зависимости от конструкции тележки) становится равным или более 90о, достаточно лишь поддерживать тележку за рукоятку 10 (самоопрокидывание крестовин).
Использование предлагаемой ручной тележки позволяет практически решить проблему перемещения груза большой массы (преимущественно до 100 кг) по лестницам и другим препятствиям при минимальных затрачиваемых усилиях, которые в сравнении с известными аналогами меньше в 3 и более раз.
Конструкция тележки проста и технологична, ее изготовление возможно силами любого предприятия машиностроительного профиля, а также индивидуальными пользователями.
(56) Авторское свидетельство СССР N 1291477, кл. В 62 В 5/02, 1985.
Авторское свидетельство СССР N 1456329, кл. В 62 В 7/06, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗОВ И ЛЮДЕЙ ПО ЛЕСТНИЦАМ И ПЛОСКОЙ ПОВЕРХНОСТИ | 2012 |
|
RU2538408C1 |
| УСТРОЙСТВО ДЛЯ МОНТАЖА ПРЕИМУЩЕСТВЕННО КОРПУСОВ РАДИОЭЛЕКТРОННЫХ БЛОКОВ | 1991 |
|
RU2013036C1 |
| ПРИСПОСОБЛЕНИЕ ДЛЯ ПОДЪЕМА ПО ЛЕСТНИЦАМ, ПРИВОДИМОЕ В ДЕЙСТВИЕ МОТОРОМ | 1998 |
|
RU2201367C2 |
| Инвалидная коляска | 1989 |
|
SU1764649A1 |
| ИНВАЛИДНАЯ КОЛЯСКА С ЭЛЕКТРОМЕХАНИЧЕСКИМ ПРИВОДОМ | 1991 |
|
RU2085166C1 |
| Инвалидная коляска | 1987 |
|
SU1503807A1 |
| ПРЕДОХРАНИТЕЛЬНОЕ УСТРОЙСТВО ПРИСПОСОБЛЕНИЙ ДЛЯ ПОДЪЕМА ПО ЛЕСТНИЦАМ | 1998 |
|
RU2185987C2 |
| Инвалидная коляска | 1989 |
|
SU1688871A1 |
| КОЛЁСНО-ГУСЕНИЧНОЕ ТРАНСПОРТНОЕ СРЕДСТВО ДЛЯ ИНВАЛИДА | 2013 |
|
RU2542220C1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ПО ЛЕСТНИЧНЫМ МАРШАМ | 2009 |
|
RU2388444C1 |
Использование: в ручных тележках, предназначенных для перемещения по лестницам и иным дорожным препятствием груза большой массы. Сущность изобретения: ручная тележка содержит платформу 1, ходовую часть с колесами 5. При повороте рычага вокруг грузовой платформы 1 собачка храпового механизма сцепляется с крестовиной 3, а при обратном повороте рычага крестовина поворачивается вокруг оси 4 опорного колеса 5 до соприкосновения очередного колеса со следующей ступенькой лестницы. 7 ил.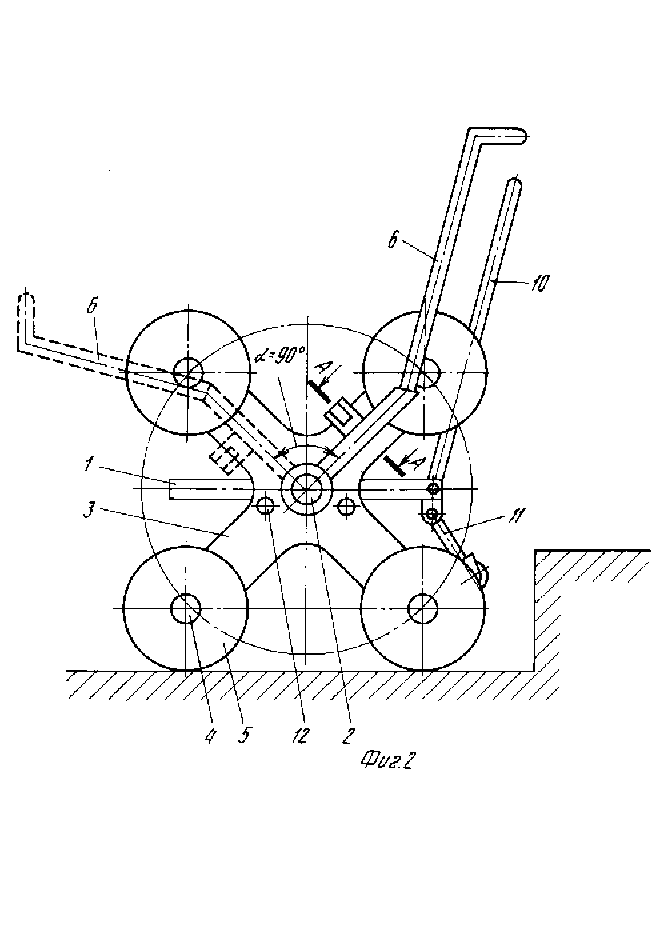
РУЧНАЯ ТЕЛЕЖКА, содержащая грузовую платформу, ходовую часть с установленными на осях колесами и механизм перемещения колесных осей, отличающаяся тем, что на платформе жестко закреплены две неподвижные оси, ходовая часть содержит две крестовины, установленные с возможностью поворота на указанных осях платформы, при этом оси колес смонтированы на концах крестовин, а механизм перемещения колесных осей содержит рычаг с храповым механизмом, установленный поворотно на осях платформы с возможностью взаимодействия с крестовинами в процессе их поворота.
