j
ё
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения тангенциальной составляющей скорости объекта | 1991 |
|
SU1809400A1 |
| Способ определения радиальной скорости объекта | 1991 |
|
SU1809399A1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА НАБЛЮДЕНИЯ ОБЪЕКТА | 1992 |
|
RU2037836C1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА | 1992 |
|
RU2101726C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 1990 |
|
RU2012901C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ В СИСТЕМАХ СО СВЕРХСКАНИРОВАНИЕМ | 1994 |
|
RU2093855C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ВНЕШНЕЙ КОНТРОЛИРУЕМОЙ ОБЛАСТИ ПРОСТРАНСТВА ВО ВНУТРЕННЮЮ ОБЛАСТЬ НАБЛЮДЕНИЯ | 1994 |
|
RU2129718C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА | 1995 |
|
RU2089924C1 |
Использование: измерение скорости, Сущность изобретения:, излучают импульс длительностью Тимп, принимают отраженный импульс через время гпп, измеряютпромежутки времени между началом сканирования на прием по закону $1Р (т) и передним; ци задним п фронтами принятого отраженного импульса, через время То после излучения первого импульса, излучают повторный импульс при сканировании луча антенны по закону 1изл (принимают через время гпп отраженный импульс, измеряют промежутки времени между началом сканирования на прием по закону &p (t) и передним t2 и задним гг фронтами отраженного импульса определяют скорость по формуле, приведенной в описании изобретения. 3 ил.
Изобретение относится к радиолокации и радионавигации и может быть использовано для измерения модуля полного вектора скорости объекта путёвой скорости в одно- пунктных системах локации, использующих методы быстрого сканирования.,.
Известны корреляционный и доппле-j;-: ров|с|кий способы измере ния путевой скорее стй объекта. Однако, данные способы не позволяют измерять путевую скорость движущихся объектов по данным наземных измерений.
Известен способ определения вектора скорости движущегося объекта, заключающийся в измерении радиальных составляю- щих скорости объекта DI, 62. Оз тремя допплеровскими измерителями, не расположенными на одной линии, измерении текущих координат объекта (х, у, z), измерении координат допплеровских измерителей (xi, yi, zi), (х2, У2, za) и (хз, уз, 2з) и определении
вектора скорости на основе решения урав-, нений . : : .- - : . ..X .,. ,. ; .Д.
.6,.-wj«js.+wJtSl iSi.
..1-1,3...
VS+Vy+V|
Ш
(2)
Однако, данный способ требует трех измерителей и принципиально не позволяет измерять путевую скорость одним измерй тельным пунктом, использующим методы ёыстррго сканирования.,
Наиболее близким к предлагаемому является дифференциальный допплеровский способ измерения путевой скорости (Vn) объекта, заключающийся в излучении импульса длительностью гимп. приеме отра-; женного импульса через время Гпп послеif излучения импульса, измерении дальности (г), измерении радиальной скорости г, изме00
§
го о
рении скорости изменения угла.,(0j и формировании сигнала, пропорционального величине путевой скорости объекта, в соответствии с выражением
Vn- V;12+(rg)2 .
Однако данный способ при использова- нии методов быстрого сканирования не позволяет учитывать изменения длительности излучаемого импульса при изменении положения (в) объекта вследствие его тангенциального движения, что снижает точность измерения путёвой скорости.
Цель изобретения - повышение точности измерения путевой скорости объекта в случае использования методов быстрого сканирования,-. ;- . ;; ;.:/.. . . .: . -.-..,.
Поставленная цель достигается т,ем, что в известном дифференциальном-способе из9 - ... «. , ;.. ;... -..- -. J 2 t имп-f-ТПП+1|-тИЗл(0,) 2)(-l)l+J Ti1Mn4-Tnn+t tM3n()lcos(6i-Й)1
с м 1 . - - 1 ;- - :; :;-.: г-У -Л-.-.: - .-.. .. - ..; у- .- ; J.
- 1йзл (01 ) +tM3fl (fe )
)-fliJ; ic {1,
где с - скорость распространения сигнала;
0о - ширина диаграммы направленности (ДН) антенны (луча антенны) в плоскости сканирования;
Тимп - длительность импульса передатчика;
Тпп .-. промежуток времени между окончанием сканирования на излучение по Закону 1изл(0)(или 0изл(1)) и началом сканирования луча антенны на прием по закону гпр(0)(или 0nP(t).
епособ поясняется фиг.1,2 и 3.
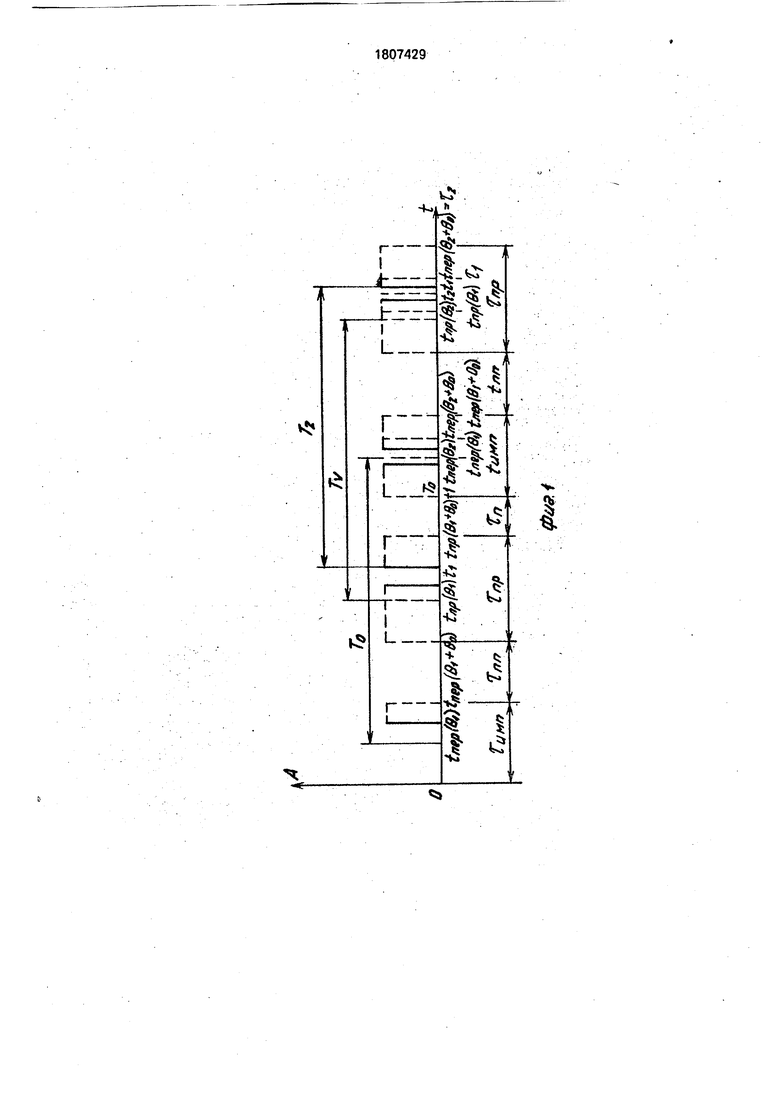
Сущность способа заключается в следующем, .:. . .- ; ... ч Л уч антён ны шириной во (в плоскости сканирования) начинает сканировать по закону бизл (t) (или 1иэл (0J) и за время длительности импульса передатчика (Тимп) поворачивается в секторе обзора .(0н, 0н +0обз) с направления 0н до направления (0н + 0обз). Через определенный промежуток времени (Тпп) в том же секторе эта же антенна начинает сканировать по закону 0пр (t) (или tnp (0J) и за время приема тПр (фиг.1) поворачивается с направления в до направления (0н + 0обз) (фиг.2). Во время сканирования луча антен- йы на прием с направления 0i принимается отраженный от объекта импульс (фиг.1, 2), длительность которого определяется как временем разворота луча антенны шириной
мерения путевой скорости, заключающемся в излучений импульса длительностью Тимп и приеме отраженного импульса через время тпп после излучения импульса, дополни5 тельно измеряют промежутки времени между началом сканирования на прием по закону 0np(t) и передним (ti) и задним (TI) фронтами принятого отраженного импульса, повторно излучают импульс длительно10 стью Тимп при сканировании луча антенны по закону 1иэл(0Л принимают отраженный импульс через время тпп после повторного излучения импульса, измеряют промежутки времени между началом сканирования на
15 прием по закону 0np(t) и передним (tz) и задним (тг) фронтами принимаемого отраженного импульса и формируют Сигнал, пропорциональный величине путевой скорости (Vn). в соответствии с выражением
Г1/2.
То - 1йзл (01 ) +tM3fl (fe )
(4)
во относительно этого направления 0 (законом сканирования tnp(% так и положени- ем объекта внутри образованного слоя видимости (фиг.2). Измеряют промежутки;ч времени между началом сканирования
прием и моментом появления отраженного импульса (ti) (фронта импульса) и моментом спада принимаемого импульса (с) (фиг.1). Эти моменты времени ц и т определяют направление (#t) на объект и дальность (01)
до объекта (фиг. 1,2)
,. (5)
О1-С/2|г мп-1изл(1) + Тпп + 11|. (6)
ч е рез оп ре деле иное время гп после окончания сканирования луча антенны на прием луч антенны начинает снова сканировать в секторе (вц,0н + ОоЬз) по закону (t) (или Тизл (б|) и излучает в пространство обзора импульс передатчика длительностью Тимп
(фиг.1). Через время Тпп после окончания излучения импульсов луч антенны сканирует в секторе обзора (вн, Вн + воЪз) по закону ftip W (и/|и tnp (б)) для приема отраженного от объекта сигнала (фиг.1). Во время сканирования (Тпр) на прием с направления ft (из-за тангенциального VT движения объекта 01 02) принимается отраженный от объекта импульс (фиг.1, 2). Измеряют
промежутки времени между началом сканирования на прием и моментом времени появления принятого импульса (t2) и моментом спада принятого импульса (TZ) (фиг. 1), которые определяют координаты (ft и Da) объекта в данный момент времени
ft flip(r2).(7)
D2 C/2 rMMn-tH3n(ft) + Tnn + t2j.(8)
По измеренным значениям (t.f, TI) и (t2, f2) формируют сигнал, пропорциональный величине путевой скорости объекта Vn, в соответствии с выражением (4),
Выражение (4) с учетом (5Н8) может быть записано в виде
Vn
VD + DJ - 2 Dt D2 cos (ft -01 j (01) + й«л(32)
В сравнении с прототипом (3) выражение (9) имеет все более высокую точность, абсолютная величина А V которой в сравнении с прототипом определяется выражением (Приложение)
(10)
Однако, выражение (10) учитывает только принцип формирования сигнала, пропорционального путевой скорости Vn объекта, и не учитывает различия в способах формирования отдельных составляющих выражений (2) и (9) (То, D, в).
Предлагаемый способ измерения путевой скорости объекта позволяет повысить точность измерения путевой скорости в случае использования методов быстрого сканирования за счет учета изменения длительности излучаемого импульса т(6) при изменении направления на объект вследствие его тангенциального движения (фиг.1,2)
r(0 tH3fl(0+0o)-tH3/i(fy(11) В общем случае
r(0i)O(ft)npM0i ft.(12),
Повышение точности измерения путевой скорости объекта (Vn) в сравнении с прототипом выражается соотношением
O..-J | LJ LAxiAXj, 1 О XI dXj(12)
/ где
V - DI.+ РЗ - 2 Pi Р2 cos (flt - ft ) 03)
To (01)+1Изл(%) X (Dl, D2, ft. ft, To) T (X1, X2, X3, X4, X5)T.
04)
To - To - 1изл() + tM3fl(ft),.(15)
Дх (Лх||1 1,5) , - (ADi. AD2,A0i, ,АТо)т,
(16)
Д Di c{t( - 1шл Ш/2, I 1,2,(17) )+ftlp(ti)-a,P(Ti)Il 1.2. (18)
35
55
ATo tM3/.(0i)-W$).
(19)
20
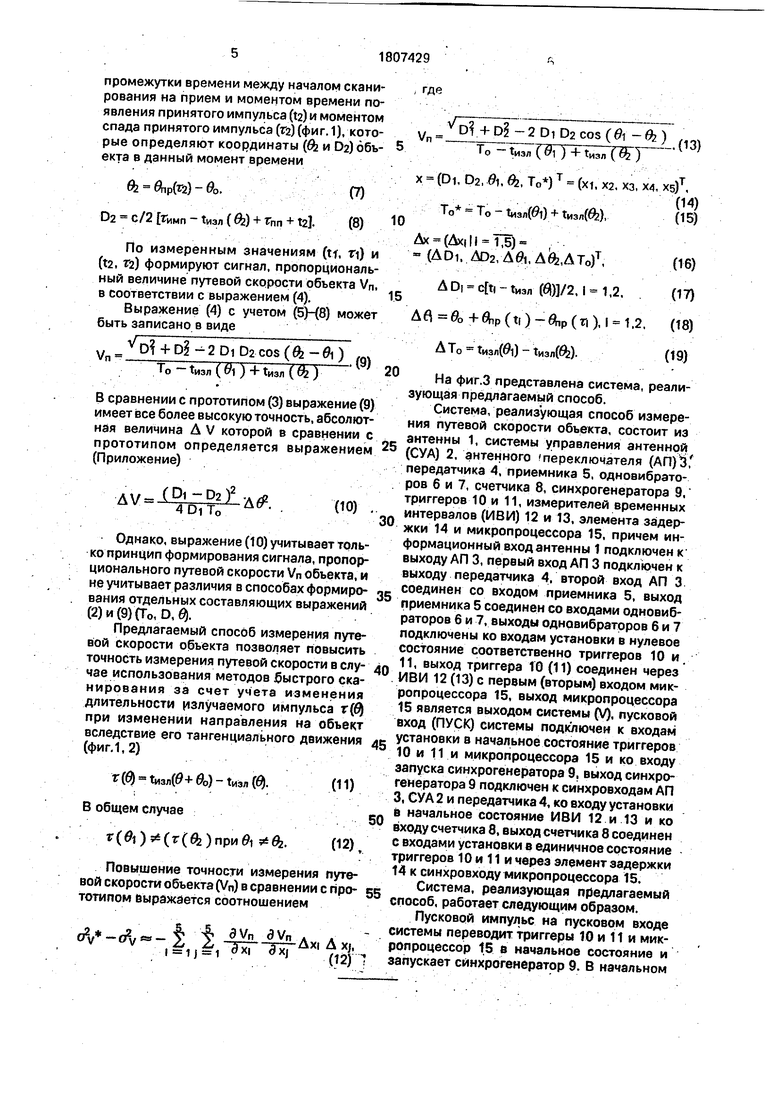
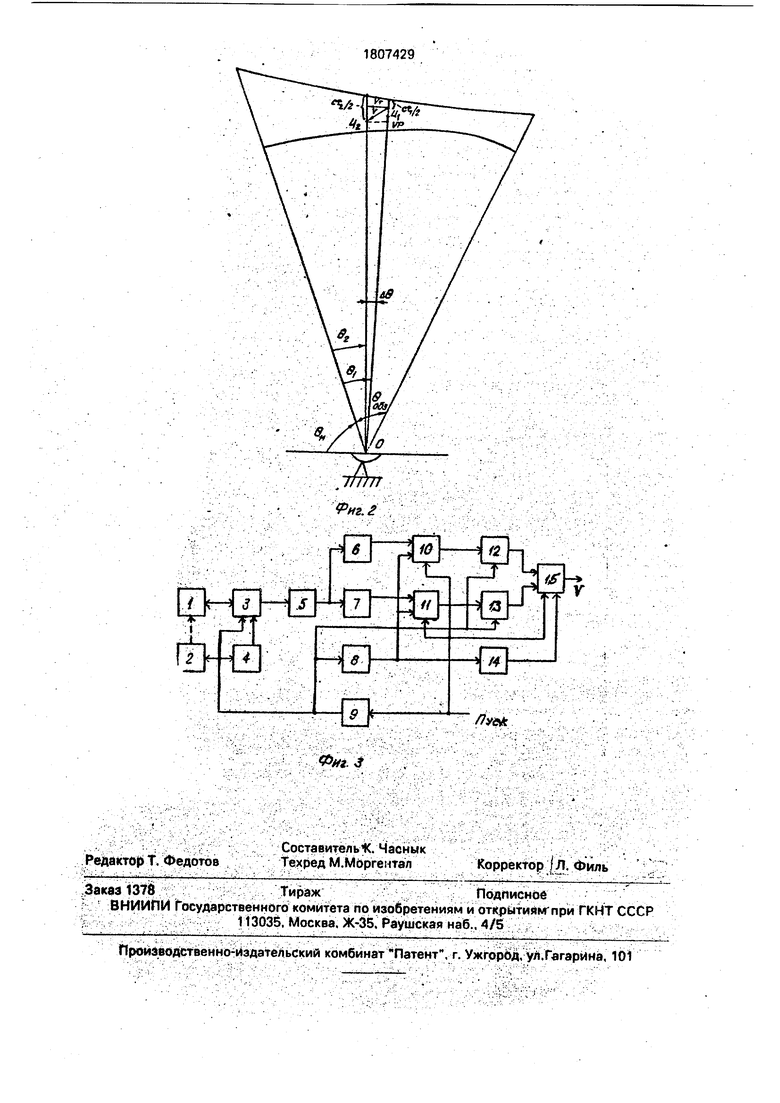
На фиг.З представлена система, реализующая предлагаемый способ.
Система, реализующая способ измерения путевой скорости объекта, состоит из
. антенны 1, системы управления антенной 5 (СУД) 2, антенного /переключателя (АП)З передатчика 4, приемника 5, одновибрато- ров 6 и 7, счетчика 8, синхрогенератора 9, триггеров 10 и 11, измерителей временных интервалов (ИВИ) 12 и 13, элемента задерJU жки 14 и микропроцессора 15, причем информационный вход антенны 1 подключен к выходу АП 3, первый вход АП 3 подключен к выходу передатчика 4, второй вход АП 3 соединен со входом приемника 5, выход приемника 5 соединен со входами одновиб- раторов 6 и 7, выходы одновибратрров б и 7 подключены ко входам установки в нулевое состояние соответственно триггеров 10 и
, 11, выход триггера 10 (.11) соединен через . ИВИ 12 (13) с первым (вторым) входом микропроцессора 15, выход микропроцессора 15 является выходом системы (V), пусковой вход (ПУСК) системы подключен к входам
.„ установки в начальное состояние триггеров . 10 и 11 и микропроцессора 15 и ко входу запуска синхрогенератора 9, выход синхрогенератора 9 подключен к синхровходам АП 3, СУА 2 и передатчика 4, ко входу установки в начальное состояние ИВИ 12 и 13 и ко
50 входу счетчика 8, выход счетчика 8 соединен с входами установки в единичное состояние триггеров 10 и 11 и через элемент задержки 14 к синхровходу микропроцессора 15.
Система, реализующая предлагаемый способ, работает следующим образом.
Пусковой импульс на пусковом входе системы переводит триггеры 10 и 11 и микропроцессор 15 в начальное состояние и запускает синхрогенератор 9. В начальном
состоянии на выходах триггеров 10 и 11 должен быть нулевой сигнал, а микропроцессор 15 в начальном состоянии подготовлен для приема первых сигналов (кодов). По первому импульсу с синхрогенератора 9 ИВИ 12 и 13 устанавливаются в начальное (нулевое) состояние, АП 3 подключает выход передатчика 4, который начинает генерировать импульс длительностью тимп. ко входу антенны 1, а СУА 2 при этом обеспечивает сканирование луча антенны 1 за время гимп в заданном секторе в, в + в0бз по закону &зл W (или tnan (О))- Этот же первый импульс с выхода синхрогенератора 9 поступает на вход счетчика 8. Счетчик 8 является счетчи- ком-делителем на 2.
По окончании действия импульса передатчика 4 СУА 2 переводит луч антенны 1 в начальное направление (вн). Через опреде- ленное время Тпп после окончания действия импульса передатчика 4 синхрогенератор 9 вырабатывает второй импульс, по которому АП 3 подключает выход антенны 1 ко входу приемника 5, а СУА 2 обеспечивает скани- рование луча антенны 1 за время тПр (фиг.1) в секторе обзора вн. В + йэбз по закону &р (t) (или tnp (Oft (фиг.2). Этот же второй импульс с выхода синхрогенератора 9 поступает на вход установки в начальное со- стояние ИВИ 12 и 13 и на вход счетчика 8, на выходе которого появляется импульс. Импульс с выхода счетчика 8 подается на входы установки в единичное состояние триггеров 10 и 11. Единичный сигнал с вы- ходов триггеров 10 и 11 поступает на входы соответственно ИВИ 12 и 13, работающие, например, по методу счетных импульсов, начинают измерения. Отраженный от цели радиоимпульс (фиг.2) принимается антен- ной 1 и через АП 3 поступает на вход приемника 5; С выхода приемника 5 видеоимпульс поступает на входы одновибраторов 6 и 7. .Одновибратор 7 формирует на своем выходе импульс по фронту поступающего на его вход импульса. Одновибратор б формирует на своем выходе импульс по спаду поступающего на его вход импульса. Импульсы с выходов одновибраторов б и 7 поступают
на входы установки 6 нулевое состояние
соответственно триггеров 10 и 11. Появление нулевого сигнала на выходе триггеров 10 и 11 и соответственно на входах ИВИ 12 и 13 означает момент скончания измерения. В результате измерений на выходах ИВИ 12 и 13 и на соответствующих входах микропроцессора 15 появятся коды соответственно и и ъ (фиг,1). Импульс с выхода счетчика 8 через элемент задерж0 5
0 5 0 5 0 5
0
5
ки 14 (Гпр, + тп Гзад 5: Тпр) подается на синхровход микропроцессора 15. По этому импульсу микропроцессор 15 производит вычисления в соответствии с алгоритмом.
xi 01 flip (TI) - 0о,
Х2 1изл(01),
ХЗ Тимп + tnn + tl - 1изл (0l).
Х4 (ХЗ)2,
т.е. формирует четыре промежуточных результата вычислений Х1-Х4.
После окончания сканирования на прием 0пр(ГПр) вн + 0обз (ИЛИ tnp (вн + 0обэ) Тпр
СУА 2 возвращает луч антенны 1 в начальное направление вн. Через определенный промежуток времени (тп) (фиг.1) на выходе синхрогенератора 9 появляется третий импульс . По третьему импульсу с синхрогенератора 9 АП 3 подключит вход антенны 1 к выходу передатчика 4, который начинает генерировать радиоимпульс длительностью Тимп. а СУА 2 обеспечивает сканирование луча антенны 1 за время Тимп (фиг.1) в секторе вн. вн + 0обз п Закону (t) (ИЛИ 1изл (в)).
Этот же третий импульс с выхода синхрогенератора 9 поступает на вход счетчика 8 и на входы установки в начальное состояние ИВИ 12 и 13, на выходах которых появятся нулевые коды.
По окончанию действия импульса передатчика
0йзл (Тимп) вн + 006э (ИЛИ 1изл(0н + 006э) Тимп)
СУА 2 переводит луч антенны 1 в начальное направление Он. Через время гпп (фиг.1) после окончания действия импульса передатчика 4 синхрогенератор вырабатывает четвертый импульс, по которому АП 3 подключает выход антенны 1 ко входу приемника 5, а СУА 2 обеспечивает сканирование луча антенны 1 за время тпр (фиг. 1) в секторе обзора в, вн + 0обэ по закону-0пр (t) (или tnp (в)) (фиг.2). Этот же четвертый импульс поступает на вход установки в начальное состояние ИВИ .12 и 13, на вход счетчика 8, на выходе которого появится импульс. Импульс с выхода счетчика 8 подается на входы установки в единичное состояние триггеров 10 и 11 и на вход элемента задержки 14. Единичный сигнал с выходов триггеров 10 и 11 поступает на входы соответственно ИВИ 12 и 13. ИВИ 12 и 13 начинают измерения. Отраженный от цели радиоимпульс (фиг.2) принимается антенной 1 и через АП 3 поступает на вход приемника 5. С выхода приемника 5 видеоимпульс поступает на входы оДновибраторов 6 и 7. На выходе одновибратора б появится импульс в момент спада поступившего на его вход видеоимпульса, а на выходе одновибратора 7 появится импульс в момент нарастания фронта поступающего на его вход видеоимпульса (фиг.1). Импульсы с выходов одновибраторов 6 и 7 переведут триггеры 10 и 11 из единичного в нулевое состояние. Момент перехода из единичного в нулевое состояние триггера 11 (10) соответствует моменту окончания измерения для ИВИ 13 (12). На выходах ИВИ 12 и 13 в результате измерений появятся соответственно коды тг и ta (фиг.1), которые поступают на входы микропроцессора 15. Импульс с выхода элемента задержки 14(гПр Гзад rnp+tn) подается на синхровход микропроцессора 15, по которому микропроцессор 15 производит вычисления с учетом промежуточных результатов xi-x/j согласно алгоритма
Х5 ft - #ip(t2) - #о,
X6 tM3fl(ft),
Х7 Тимп Гпп + 12 1изл (ft),
xd(xif,
Vn-C/2V Х8 + Х4 - ХЗ X COS ( Х1 - Xg ) /Ро -Х2 + Х6,
т.е. на выходе микропроцессора 15 будет сформирован код, соответствующий величине путевой скорости V объекта. На этом система (фиг.З) заканчивает работу. Для данной системы заданными (известными) являются величины с, во, fnn, тимп. Т0, а также функциональные зависимости 0np(t),
U13ll(6).
По сравнению с прототипом предлагаемый способ измерения путевой скорости объекта V позволяет повысить точность определения Vn на величину
avn avn
9xj
Axi А Xj,
( 2, имп+Гпп+«-П,зл(#) ( «инп+Гпп+q -1изл (6)) cos (-flH
с .....
То 1изл +{иэл :---------------------
.Vta-f
где0| - 0np (tt) - 0p;
С - скорость распространения сигнала;
где
Vn
Ы + РЗ -2 Pi D2CQS ( в - ft )
х (Х1,.„, х5)Т - (Di, D2, 0i. ft, To)T То То - 1изл (01) + 1изл (ft),
А XI A DI - - Тизл (ft)/2,
Д xi+2 А 61+2 6U Р (tib up (n) ,1 1,2.
А Х5 А То Тиэл (01) - Тизл (ft).
за счет учета неравномерности законов сканирования при излучении 1Изл($ и при приеме впр (t), т.е. за счет учета изменения длительности излучаемого (принимаемого) импульса при изменении направления (в) на объект вследствие его тангенциального движения (фиг.2, 1).
25
Формула изобретения
Способ определения путевой скорости объекта, заключающийся в том, что излучают импульс длительностью Гимп и периодом
повторения То, принимают отраженный импульс через время Гпп после излучения при сверхбыстром сканировании луча антенны в секторе 00бз. за время гИМп, отличающийся тем, что, с целью повышения
точности измерения путевой скорости, дополнительно измеряют промежутки времени между началом сканирования на прием по закону $ip(t) и передним ti с задним ti фронтами принятого отраженного импуль-.
са, через время То после излучения первого импульса излучают повторный импульс длительностью гимп при сканировании луча антенны по закону Ъюл(0), принимают через время гпп после излучения повторного импульса отраженный импульс, измеряют промежутки времени между началом сканирования на прием по закону $ip(t) и передним t2 и задним тг. фронтами отраженного импульса, а путевую скорость vn объекта
определяют по формуле
1/2
1изл( 0j) и 1изл(0а) - закон сканирования луча антенны на излучение;
0о - ширина главного лепестка диаграммы направленности антенны.
I
| Громов Г.Н | |||
| Дифференциально-геометрический метод навигации, М.: Радио и связь, 1986, с.384 (прототип). | |||
| ; |
