Изобретение относится к радиолокации и радионавигации и может быть использовано для измерения радиальной скорости объекта в системах со сверхсканированием.
Известен частотный способ измерения радиальной скорости объекта, заключающийся в сравнении частот принятого и излученного сигнала, разность которых прямо пропорциональна радиальной скорости объекта..Однако данный способ имеет низкую точность при излучении и приеме импульсных сигналов, так как при отражении от движущегося объекта смещение частоты приобретает каждая гармоническая составляющая спектра.
Наиболее близким решением к предлагаемому изобретению является способ измерения радиальной скорости объекта, заключающийся в излучении пачки импульсов с периодом То, приеме отраженных импульсов, измерении периода следования отраженных импульсов Tv и формировании сигнала, пропорционального величине радиальной скорости объекта Vp. в соответствии с выражением
Vp
(То - Tv)/T0 .
(1)
Однако данный способ имеет низкую точность измерения радиальной скорости объекта в случае сверхбыстрого сканирования луча антенны из-за неучета тангенциальной составляющей полного вектора скорости объекта.
Целью изобретения является повышение точности измерения радиальной скорости объекта в случае сверхбыстрого сканирования луча антенны за счет учета тангенциальной составляющей скорости объекта.
Поставленная цель достигается тем, что в известном способе измерения радиальной скорости объекта, заключающемся в излучении импульсов с периодом Т0 и приеме отраженных импульсов, дополнительно измеряют промежутки времени т между началом сканирования луча антенны на прием по закону %p(t) (или tnp(Q)) и окончанием действия i-ro принимаемого отраженного импульса и формируют сигнал, пропорциональный величине радиальной скорости объекта Vp, в соответствии с выражением
(Л
С
СО
о о
со
О
ю
VE
с 2
T| - Т | + 1 tnp ( QI ) + tnp ГQl + 1 - гизл ( ©i ) -Мизл То - Т-изл (©.) + tM3n(©l + 1 Т
(2)


Использование: измерение скорости объекта. Сущность изобретения: излучают сигнал с периодом Т0, принимают отраженный сигнал, измеряют промежутки времени П между началом сканирования луча антенны на прием по закону tnp(0) и окончанием действия i-ro принятого отраженного импульса, определяют радиальную скорость Vp по приведенной формуле. 4 ил.
где 0излМ(или 1изл(©))- закон сканирования луча антенны при излучении импульса;
©р - ширина луча (диаграммы направленности (ДН) антенны.
Сущность способа заключается в следующем.
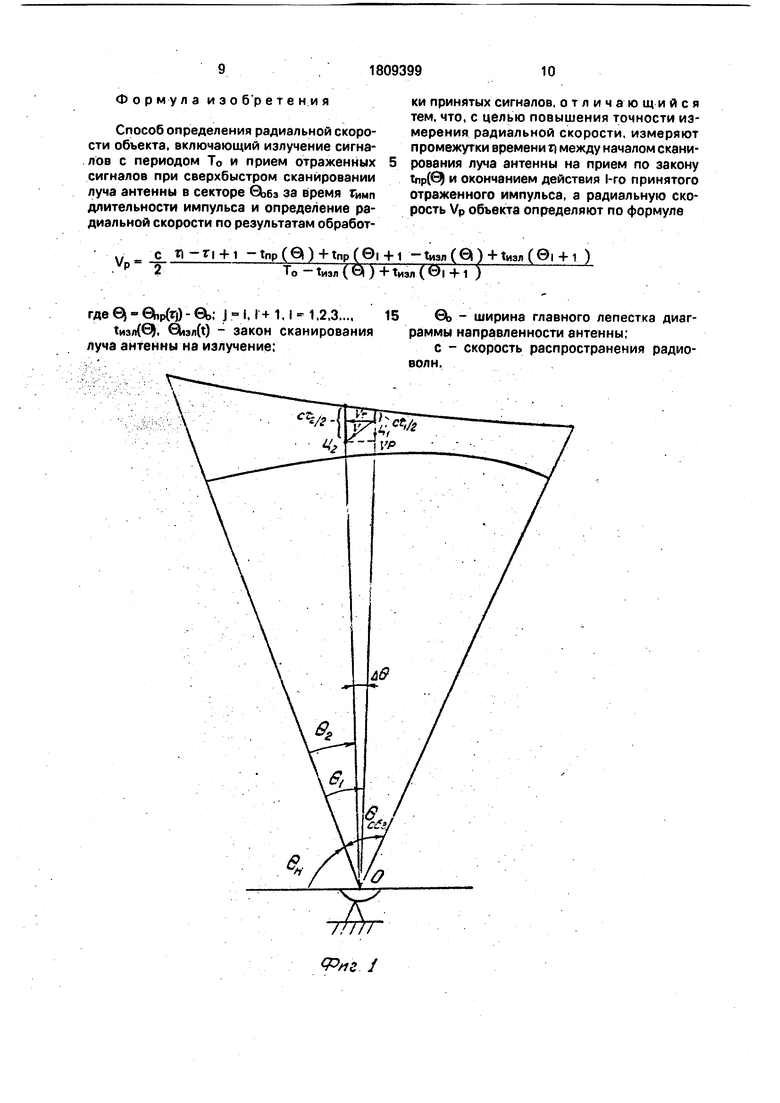
Луч антенны сканирует по закону ©изл(т.) и за время длительности излучаемого импульса Тимп (длительность импульса передатчика) поворачивается в секторе (©н, ®н + ©Ьбэ) (фиг, 1). Через определенный промежуток времени т™ в том же секторе начинает сканировать луч антенны по закону 0hp(t) для приема отраженного от объекта сигнала. За время гпр разворота луча антенны при приеме (фиг. 2) луч поворачивается с направления ©« до направлена (Он + ©обз). Во время этого поворота с направления ©1 принимается отраженный от объекта импульс, длительность которого определяется как временем разворота луча (ДН) ан снны относительно этого 01 направления на угол, равный ширине ДН антенны So
Ти tnp(©1 + ©о) - tnp(©
(3)
так и положением цели внутри образованного слоя видимости. Из фиг. 1, 2 видно, что момент окончания приема сигнала с направления € (момент окончания действия 1-го принимаемого отраженного импульса) равен
30
После окончания сканирования луча антенны на прием (tnp(©H -- ©обз) тПр) через определенное время гп луч антенны начинает сканировать по закону ©изл(1) для излучения импульса передатчика. За время, равное длительности тимп импульса передатчика, луч антенны разворачивается в секторе обзора (Он, Он + бЬбз). Через время Гпп после окончания излучения (тизл(©н + + @обз) Тимп) (фиг, J) в этом же секторе начинает сканировать луч антенны по закону @np(t) для приема отраженного от объекта, находящегося в направлении . си(нала. В общем случае ©2 ©1 (0i + 1 У ©i ),таккакмодульполно- то вектора скорости объекта у имеет помимо радиальной Vp и тангенциальную VT составляющую:.
VC
(6)
tnp(6| + eb)tl, j-1,2,.., (4) где 1изл(©и) - tnp(i) - О,
tnp( + Ообз) Гпр, tH3n(v + ®обз) Тимп.
Vn
П - Г2 + tnp ( &2 ) tnp
Измеряется промежуток времени гг (фиг. 2) между началом сканирования на прием и окончанием действия второго принимаемого отраженного импульса.
На основе измеренных значений п и гг и известного периода То формируют сигнал, пропорциональный величине радиальной скорости объекта, в соответствии с выражением (см. приложение)
Эр + 1изл ( Qz ) - 1Изл ( Qt )
35
40
То + 1:изл ®2 ) изл ( ©1 )
(7)
где 0|, i 1,2 рассчитывается согласно (5). Таким образом, предлагаемый способ позволяет повысить точность измерения радиальной скорости объекта в сравнении с прототипом (1) на величину (см. Приложение)
Лу„ С tnp(Ql)-tnp(©2)
ii Vp - -арт X
ID
Г 1 J v Лиз л (©I ) - 1Изл ( ©2 ) Х11Ч.
tnp ( ©1 ) tnp ( 02 )
55Тизл(0) tnp(0) t (0) Гимп 0/©обз. (9)
углы ©1 и ©2 связаны соотношением (.. ......02 01 + хв... (10)
Тогда направление на цель Э| определяется выражением
(5)
Далее измеряют промежуток времени TI между началом сканирования луча антенны на прием и окончанием действия первого принимаемого отраженного импульса.
После окончания сканирования луча антенны на прием (tnp(©H -- ©обз) тПр) через определенное время гп луч антенны начинает сканировать по закону ©изл(1) для излучения импульса передатчика. За время, равное длительности тимп импульса передатчика, луч антенны разворачивается в секторе обзора (Он, Он + бЬбз). Через время Гпп после окончания излучения (тизл(©н + + @обз) Тимп) (фиг, J) в этом же секторе начинает сканировать луч антенны по закону @np(t) для приема отраженного от объекта, находящегося в направлении . си(нала. В общем случае ©2 ©1 (0i + 1 У ©i ),таккакмодульполно- то вектора скорости объекта у имеет помимо радиальной Vp и тангенциальную VT составляющую:.
VC
(6)
(7)
где То и Tv - периоды следования соответственно излучаемых и отраженных импульсов в прототипе.
Пример, Пусть законы сканирования при излучении tM3n(0) и при приеме tnp(0) сигнала совпадают и равномерны
где х - та доля ширины ДН, на величину которой смещается объект в промежуток времени между двумя излучаемыми импульсами, а период следования Т0 излучаемых импульсов кратен длительности импульса Гимп передатчика:
Т0 МГимп.(11)
Тогда выражение (8) примет вид
)
1
/1 4--IM
v + TO ;
АУр х 6ь с Vp N Vp
Для случая Gt/ОЬбз 0,1, N 100, х 0,1 относительное повышение точности в сравнение с прототипом равно
В случае, когда луч антенны не сканирует
tnp(G5 1изл(м) - Тимп,
ДУР 0,
т.е.
а выражение (7) с учетом обозначений фиг. 2, 3 примет вид
Т1 -Г2
Т0
С Т0 - Ту 2
Тс
что полностью совпадает с формулой (1) для прототипа.
В случае, когда VT 0 (объект движется вдоль направления Bi к измерителю V Vp);
а выражение (7) снова вырождается в формулу (1) для прототипа.
Таким образом, предлагаемый способ позволяет повысить точность измерения радиальной скорости объекта за счет учета тангенциальной составляющей скорости объекта, т.е. достигается поставленная цель изобретения.
На фиг. 4 представлена система, реализующая способ измерения радиальной скорости объекта.
Система, реализующая предлагаемый способ измерения радиальной скорости объекта, состоит из антенны 1, системы управления антенной 2 (СУА), антенного пере- 5 ключателя 3 (АП), передатчика 4, приемника 5, устройства формирования импульса окончания счета 6 (УФИОС), триггеров 7, 8, измерителей временного интервала 9, 10 (ИВИ), микропроцессора 11, счетчиков-делителей
10 на 2 12, 13 (СТ), сумматора по модулю 2 14 (SM) и синхрогенератора 15, причем информационный вход антенны 1 подключен к выходу АП 3, первый вход АП 3 соединен со входом приемника 5, выход приемника 5
15 подключен к УФИОС 6, выход УФИОС 6 соединен со входами установки в нулевое состояние триггеров 7 и 8, выходы триггеров 7 и 8 подключены к входам ИВИ соответственно 9 и 10, выходы ИВИ 9 и 10 соединены
20 соответственно с первым и вторым входами микропроцессора 11, выход микропроцессора 11 является выходом системы, пусковой вход системы соединен со входами начальной установки триггеров 7 и 8 и вхо25 дом запуска синхрогенератора 15, выход синхрогенератора 15 подключен к синхров- ходам АП 3, СУА 2 и передатчика 4.и к входу СТ 12, выход СТ 12 подключен к первому входу SM 14 и через СТ 13 ко второму входу
30 SM 14 и входу установки в единичное состояние триггера 7, выход SM 14 подключен ко входу установки в единичное состояние триггера 8, выход передатчика 4 соединен со вторым входом АП 3, выход СУА 2 соеди35 нен с управляющим входом антенны 1.
Система, реализующая предлагаемый способ, работает следующим образом.
Пусковой импульс на пусковом входе системы переводит триггеры 7 и 8 в началь
40 ное (нулевое) состояние и запускает синхро- генератор 15. По первому импульсу с синхрогенератора 15 АП 3 подключает вь,- ход передатчика 4 ко входу антенны 1, передатчик начинает генерировать импульс
45 длительностью тимп, а СУА 2 при этом обеспечивает сканирование луча антенны 1 за время Гимп в заданном секторе обзора (&н, Он бЬбз) по закону (х) (или т.изл(Э)). Этот же первый импульс с выхода
50 синхрогенератора 15 поступает на вход С 12. По окончанию действия импульса передатчика 4 СУА 2 переводит луч антенны 1 в начальное направление GV.
По второму импульсу синхрогенератора
55 15 АП 3 подключает выход антенны 1 ко входу приемника 5, а СУА 2 обеспечивает сканирование луча антенны 1 за время гпр (фиг. 2) в секторе обзора (О, Ой + бЬбз) по закону ©hp(t) (или tnpfGJ). По окончанию действия второго импульса синхрогенератора 15 СУД 2 переводит луч антенны 1 в начальное направление ©и.
Этот же второй импульс с выхода синхрогенератора 15 поступает на вход СТ12, на выходе которого появляется единичный сигнал, который подается на первый вход SM 14 и на вход СТ 13. Так как на второй вход SM 14 поступает нулевой сигнал с выхода СТ 13, то на выходе SM 14 появится единичный сигнал, который поступит на вход установки в единичное состояние триггера 8. В результате чего на выходе триггера 8 поя- вится-высокий потенциал, который поступит на вход ИВИ 10. ИВИ 10, работающий, например по методу счетных импульсов, начинает измерение. Отраженный от цели радиосигнал принимается антенной 1 и через АП 3 поступает на вход приемника 5. С выхода приемника 5 видеоимпульс поступает на вход УФИОС 6. УФИОС 6 (например. . одновибратор) формирует импульс в момент спада поступающего на его вход видеоимпульса. Импульс с выхода УФИОС 6 поступает на вход установки в нулевое состояние триггеров 7 и 8. Так как триггер 7 находился до этого в нулевом (начальном) состоянии, то его состояние не изменится. А на выходе триггера 8 появится нулевой потенциал, который поступает на вход ИВИ 10. Момент появления нулевого потенциала на входе ИВИ 10 соответствует моменту окончания измерения. Результат измерения (например, код)п с выхода ИВИ 10 поступает на первый вход микропроцессора 11.
По третьему импульсу с синхрогенератора 15 АП 3 подключает выход передатчика .4 ко входу антенны 1. передатчик начинает генерировать импульс длительностью Гимп (фиг. 2), а СУА 2 при этом обеспечивает сканирование луча антенны 1 за время Гимп в секторе обзора (Он,
@ + вэбз) ПО Закону i3n(t) (ИЛИ 1изл(0)). ЭТОТ
же импульс с выхода синхрогенератора 15 поступает на вход СТ 12. По окончанию действия импульса передатчика 4 СУА 2 переводит луч антенны 1 в начальное направление Фь
V
JL 2
Т -72
- tnp ( Bi ) 4- tnp ( &2 ) - Т0 - tM3n ( 01 ) + 01 €ЦР(Г|) -
По сравнению с известным предлагав- 55 д.. с tnp ( QI ) - tnp (Oj)
мый способ позволяет повысить точность измерения радиальной скорости Vp объекта на величину
2
1изл
tnp (
То
Oi) - 1Изл (Ог)
tnp (0i) - tnp (Эг) 0i 0hP(ri)-0b, 1 1.2.
По четвертому импульсу синхрогенератора 15 АП 3 подключает выход антенны 1 ко входу приемника 5, а СУА 2 обеспечивает сканирование луча антенны 1 за время тпр в
5 секторе обзора (©, ®н + бЬбэ) по закону 0hp(t) (или tnp(®)). По окончанию действия четвертого импульса с выхода синхрогенератора 15 СУА 2 переводит луч антенны 1 в начальное направление 6. Этот же чет10 вёртый импульс с выхода синхрогенератора 15 поступает на вход.СТ 12, на выходе которого появится единичный сигнал, который подается на первый вход SM 14 и на вход СТ 13. Этот единичный сигнал с выхо15 да СТ 12 появится на выходе СТ 13, поэтому на обоих входах SM t4 появятся единичные сигналы, в результате чего на выходе SM 14 будет нулевой потенциал. Нулевой потенциал на выходе SM 14 не
20 изменит нулевого состояния триггера 8. На вход установки в единичное состояние триггера 7 поступает единичный сигнал с выхода СТ 13. что вызовет появление высокого потенциала на выходе триггера 7. Вы- 25 сокий потенциал с выхода триггера 7 подается на вход ИВИ 9. который начинает измерение. Отраженный от цели радиосигнал принимается антенной 1 и через АП 3 поступает на вход приемника 5.
30 С выхода приемника 5 видеоимпульс поступит на вход УФИОС 6, который формирует импульс в момент спада по- . ступающего на его вход видеоимпульса. Импульс с выхода УФИОС б поступает на
35 вход установки в нулев.ое состояние триггеров 7 и 8. В результате этого триггер 7 перейдет из единичного в нулевое состояние. Нулевой потенциал поступит на вход ИВИ 9, который в момент появления нуле40 вого потенциала прекратит измерения. Результат измерения тг (например, код) с выхода ИВИ 9 поступит на второй вход микропроцессора 11. В результате подачи, например, кодов г и га на оба входа мик45 ропроцессора 11. на его выходе будет сформирован сигнал (например, код), пропорциональный величине радиаль- . ной скорости Vp объекта, в соответствии с выражением ..-..
Q 2 ) 1,2.
&i)+tH3n(Oiz)
.. с tnp ( QI ) - tnp (Oj
2
1изл
tnp (
То
Oi) - 1Изл (Ог)
tnp (0i) - tnp (Эг) 0i 0hP(ri)-0b, 1 1.2
Формула изоб ретения
Способ определения радиальной скорости объекта, включающий излучение сигналов с периодом То и прием отраженных сигналов при сверхбыстром сканировании луча антенны в секторе бЬбз за время Тимп длительности импульса и определение радиальной скорости по результатам обработVn
С Т1-Г1+1 -Тпр(в|)-Ипр(Э|-Ц -tHM (Q )-Иизл 2То - 1ИЗЛ ( сЦ ) +Чизл ( 01 + 1 )
где ф - 6hp(rj) - Ob; J I, I + 1,1 1,2.3...,
1Изл(в, Glianft) - закон сканирования луча антенны на излучение;
ки принятых сигналов, отличающийся тем. что, с целью повышения точности измерения радиальной скорости, измеряют промежутки времени т между началом сканирования луча антенны на прием по закону tnp(Q} и окончанием действия 1-го принятого отраженного импульса, а радиальную скорость Vp объекта определяют по формуле
1 -И )
15 QQ - ширина главного лепестка диаграммы направленности антенны;
С - скорость распространения радиоволн.
urn
I Г
TV
TV
-S.
1
| Гинзбург В.М | |||
| Формирование и обработка изображений в реальном времени | |||
| Методы быстрого сканирования | |||
| Пневматический водоподъемный аппарат-двигатель | 1917 |
|
SU1986A1 |
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
