Изобретение относится к радиолокации и радионавигации и может быть использовано для,измерения тангенциальной скорости движения объектов в системах со сверхска- нированием.
Известен дифференциальный способ измерения тангенциальной скорости КЛА, заключающийся в измерении частоты До- пплера тд для нескольких положений КЛА в области траверзной дальности гт и формировании сигнала, пропорционального тангенциальной скорости КЛА, на основе полученной системы уравнений
fдс - - f с
VT
V1 -(Гт/Г|) W
Известен способ измерения тангенциальной скорости VT (3, с.314), заключающийся в излучении сигнала длиной волныА в направлении цели, приеме отраженного от движущейся цели сигнала разнесенными на интервал d двумя антеннами, измерении направления ©на цель, измерении частот fi и f2 сигналов (с выходов обеих антенн) с последующим вычитанием результатов fi-f2,- измерении дальности D до цели и формировании сигнала, пропорционального тангенциальной скорости, в соответствии с выражением
Ё
00
о
2
О О
VT 0
fi -f2
d/A cos 0
(2)


| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения путевой скорости объекта | 1991 |
|
SU1807429A1 |
| Способ определения радиальной скорости объекта | 1991 |
|
SU1809399A1 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ДО ОБЪЕКТА | 1992 |
|
RU2101726C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛА НАБЛЮДЕНИЯ ОБЪЕКТА | 1992 |
|
RU2037836C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ В СИСТЕМАХ СО СВЕРХСКАНИРОВАНИЕМ | 1994 |
|
RU2093855C1 |
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 1990 |
|
RU2012901C1 |
| СПОСОБ ОТОБРАЖЕНИЯ ВНЕШНЕЙ КОНТРОЛИРУЕМОЙ ОБЛАСТИ ПРОСТРАНСТВА ВО ВНУТРЕННЮЮ ОБЛАСТЬ НАБЛЮДЕНИЯ | 1994 |
|
RU2129718C1 |
| Устройство для сличения эталонов времени | 1989 |
|
SU1741096A1 |
| ИМПУЛЬСНО-ФАЗОВАЯ РАДИОВЫСОТОМЕРНАЯ СИСТЕМА | 2013 |
|
RU2551448C1 |
| Способ аналого-цифрового преобразования и устройство для его осуществления | 1990 |
|
SU1837395A1 |
Использование: измерение скорости объекта. Сущность изобретения: излучают импульс длительностью тимп, периодом повторения Т0, принимают отраженный импульс, измеряют дальность D до объекта, направление 0| прихода принятого сигнала, через время То излучают повторный импульс, принимают отраженный, измеряют направление ©2 его прихода, определяют тангенциальную составляющую скорости объекта VT по приведенной формуле. 3 ил..
Данный дифференциальный способ .имеет ограниченные возможности (измерение в области Гт) и низкую точность измерения при использовании метода быстрого сканирования из-за неучета неравномерности закона сканирования t(0) (или 0(t)).
Однако данный способ имеет низкую точность измерения, т.к. требует высокой идентичности обоих каналов приема и измерения f. а также в случае использования метода быстрого сканирования из-за неучета различий длительностей излучаемых (принимаемых) сигналов в различных 0направлениях и требует больших размеров антенны d.
Наиболее близким к предлагаемому является способ измерения тангенциальной скорости VT, заключающийся в излучении радиосигнала с длиной волны Я, приеме двумя разнесенными на расстояние d пунктами отраженного сигнала, измерении направления на цель 0, непосредственным измерением частоты A F биений двух принимаемых сигналов (fi и fa), измерений дальности до цели D и формировании сигнала, пропорционального тангенциальной скорости цели VT, в соответствии с выражением
.
-°--сгУ г :Я
Однако данный способ имеет низкую точность измерения VT, так как не учитывает различий длительностей излучаемых (принимаемых) сигналов (при измерении D и 0) и требует двух разнесенных приемных пунктов или одной антенны с большой базой d.
Цель изобретения - повышение точно- сти измерения тангенциальной скорости объекта однопунктной системой локации на основе быстрого сканирования за счет учета изменения длительности излучаемых импульсов при изменении направления.
Поставленная цель достигается тем, что в известном способе измерения тангенциальной скорости путем непосредственного измерения частоты биений двух принимаемых сигналов, заключающем- ся в излучении радиоимпульса, приеме отраженного от объекта радиоимпульса, измерении дальности D до объекта, измерении направления 01 приема, дополнительно повторно через время Т0 излучают и принимают радиоимпульс, измеряют направление 02 приема импульса и формируют сигнал, пропорциональный величине тангенциальной скорости VT объекта, согласно выражения
VT D.
То - tnep ( 01 ) + tnep ( 02. )
-.(4)
где tnep(0) - закон сканирования луча антенны при излучении радиоимпульса.
Сущность способа заключается в следу- .ющем.
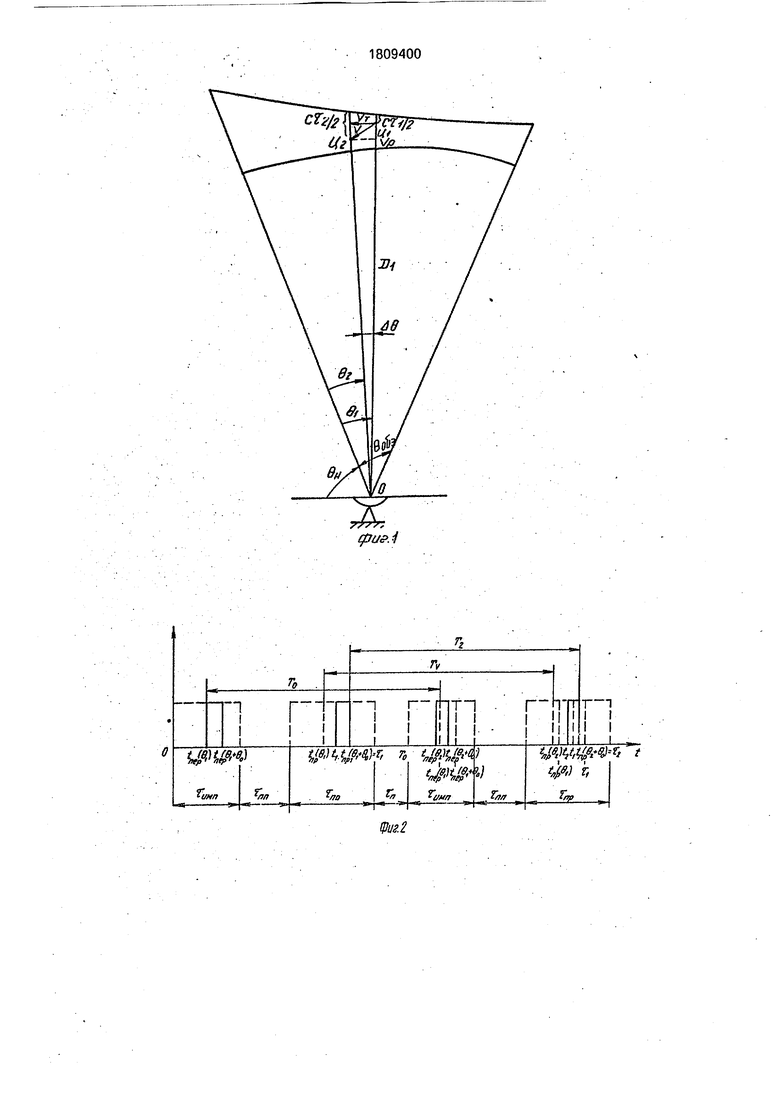
Луч антенны сканирует по закону tnep(0) (или ©nep(t)) и за время длительности излучаемого импульса гимп поворачивается в секторе (0н, 0н + 0обз). Через определенный промежуток времени гпп в том же секторе начинает сканировать луч антенны по
закону tnp(0) (или 0np(t)) для приема отра женного от объекта сигнала
tnp(O) 0; tnp (0обэ) ГПР,
т.е. время обзора сектора (0н. 0н + 0Ьбэ) при приеме равно гпр. Во время сканирования луча антенны на прием с некоторого направления 01 принимается отраженный от движущейся цели сигнал. Измеряется направление 01 приема сигнала
01 0пр (TI) - 0о ,
(5)
где ri - момент окончания отраженного от цели импульса
TI tnp(0i + 0b) ;
0о - ширина луча (диаграммы направленности) антенны. Измеряется дальность до цели DI
Dl -J- Гимп - tnep (01 ) + ГПП + ti . (6)
Через определенное время гп после окончания сканирования на прием tnp(0o6a) гпр. луч антенны снова сканирует в секторе обзора ( 0н. 0н + ©обз) ПО Закону tnep(0) И
антенна излучает радиоимпульс (фиг. 1, 2)
То Гимп + Тпп + Гпр + Гп .
(7)
Через время гпп по окончании излучения радиоимпульса tnep(0o6a) Гимп луч антенны начинает сканировать по закону tnp(0) для приема сигналов: tnp(o) 0. Во время сканирования на прием с некоторого направления 02 (в общем случае 0i 0г) принимается отраженный импульс. Измеряют направление (02) приема (фиг. 1)
(8)
где Г2 - момент окончания действия принятого импульса
Г2 tnp (02 + 0о).
По полученным данным формируют сигнал, пропорциональный величине тангенциальной составляющей скорости цели, в соответствии с выражением
VT D
01-0
т;
, (9)
ГДе То То - tnep(0l) - tn«p(0z),
(Ю)
где VTT0 - отрезок пути, проходящий объектом за время Т0 по касательной к окружности радиусом D и центром в точке фазового центра антенны (точка 0 на фиг. 2);
0(01 - 02) - длина дуги, определяемая центральным углом, равным (0i - 0г) радиан.
Ввиду малости величины VrTo можно считать равными длину дуги D(©i - ©2) и отрезок касательной к этой окружности.
Рассмотрим точностные характеристики предлагаемого метода в сравнении с прототипом.
Пусть в прототипе осуществляют определение VT в одном пункте по двум измерениям в моменты времени tio и t20, причем t20 - tio To. Тогда
V/-D -Щг D
d sin©
Я 1 dAy d sin 0 2 я d t
-D
2 dVe-gr() D
Afc
d sirT0 d
L(Acose)D-Af
«D
Ж
D
Tn
Полученное выражение(11) по форме совпадает с предлагаемым (9), ко в прототипе измерения производят с ошибками
5D -i- 5T -§- ti-tnep(0i); (12)
1
(13)
.- 2 L Эо + 0пр (ц ) - ©пр (ri) ;
б То I То - То I I tnep(02) - tnep(0l) I, (14)
где 0Ь - ширина луча антенны. Выражение (14) записано для абсолютной ошибки измерения угла 0 в сравнении с традиционным измерением направления методом вилки
(r-,) + 0np(ti) rs ri ti (15)
где TS - длительность принимаемого сигнала. Дисперсия измерения тангенциальной составляющей скорости в линейном приближении равна
((Чт-Ч™Ґ
2 Dlaj + egab + D2 0Sпто/Т и
(16)
Тои
С учетом ошибок (12)-(14) можно записать
20
М(х-х0- д х)2 ± М(х-х0)2 + (д х)2, х (D. То, 0)т.
(17)
25 Тогда повышение точности измерения VT предлагаемым способом в сравнении с прототипом определяется величиной
- (А/, rvT
VT
021((3р)2+2ра(а0)2+р21в2,(зт0)2/т:
Той
преерем t20
y t
(11)
впаипе
(12)
13)
(14)
ной и с ния
(15)
ала. ной при16)
40
10
(18)
35 где «3D,б©,дТ0 определяются согласно (12Н14).
Таким образом, предлагаемый способ позволяет повысить точность измерения тангенциальной скорости объекта однопун- ктной системой локации, использующей методы быстрого сканирования, на величину (18) за счет учета изменения длительности излучаемых импульсов (фиг. 1) с изменением направления их прихода вследствие тан45 генциального движения цели (учет законов сканирования tnep(0), 0np(t) в выражениях (12)-(14).
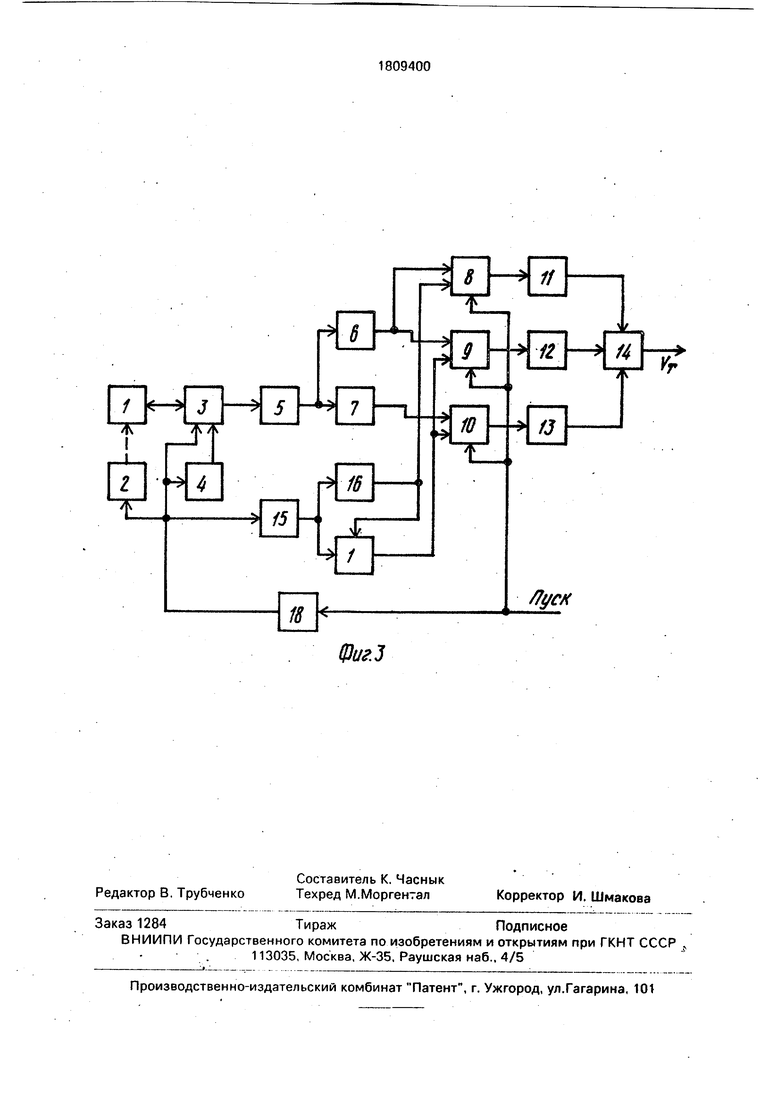
На фиг. 3 представлена система, реализующая предлагаемый способ измерения
50 тангенциальной скорости объекта.
Система, реализующая предлагаемый способ измерения тангенциальной скорости объекта, состоит из антенны 1, системы управления антенной (СУА) 2, антенного пе55 реключателя (АП) 3, передатчика 4, приемника 5, устройств формирования импульсов окончания счета(УФИОС) 6 и 7, триггеров 8, 9 и 10, измерителей временных интервалов (ИВИ) 11, 12 и 13, процессора 14, счетчиков- делителей на 2 (СТ) 15 и 16, элемента Исключающий ИЛИ 17 и синхрогенератора 18, причем информационный вход антенны 1 подключен к выходу АП-3, первый вход АП 3 соединен со входом приемника 5, выход
5 приемника 5 подключен ко входах УФИОС 6 и 7, выход УФИОС б подключен ко входам установки в нулевое состояние триггеров 8 и 9, выход УФИОС 7 подключен ко входу установки в нулевое состояние триггера 10, выходы триггеров 8, 9 и 10 соединены со входами ИВИ соответственно 11. 12 и 13, выходы ИВИ 11. 12 и 13 подключены соответственно к третьему, второму и первому входам процессора 14, выход процессора
15 14 является выходом системы VT, пусковой вход устройства соединен со входами начальной установки триггеров 8, 9 и 10 и входом запуска синхрогенератора- 18, выход синхрогенератора 18 подключен к синхров- ходам АП 3, передатчика 4 и СУА 2 и ко входу СТ 15, выход СУА 2 соединен с управляющим входом антенны 1. выход передатчика 4 соединен со вторым входом АП 3, выход СТ 15 подключен к первому входу элемента Исключающий ИЛИ 17 и ко входу СТ 16, выход СТ 16 подключен ко входу установки в единичное состояние триггера 8 и второму входу элемента Исключающий ИЛИ 17, выход элемента Исключающий ИЛИ 17 соединен со входами установки в единичное состояние триггеров 9 и 10.
Система, реализующая данный способ, работает следующим образом.
Пусковой импульс на пусковом входе системы переводит триггеры 8, 9 и 10 в начальное (нулевое) состояние и запускает синхрогенератор 18. По первому импульсу с синхрогенератора 18 АП 3 подключает выход передатчика 4, который генерирует излучаемый импульс длительностью гимп (фиг, 1), ко входу антенны 1, а СУА 2 при этом обеспечивает сканирование луча антенны 1 за время длительности импульса передатчика 4 тимп в заданном секторе Он, Он + ОЬбз) по закону tnep(69 {или GViep(t). Этот же первый импульс с выхода синхрогенератора 18 поступает на вход СТ 15. По окончанию действия импульса передатчика 4 СУА 2 переводит луч антенны 1 в начальное & направление. Через время inn (фиг. 2) синхрогенератор 18 вырабатывает второй импульс. По второму импульсу синхрогенератора 18 АП 3 подключает выход антенны 1 ко входу приемника 5, а СУА 2 обеспечивает сканирование луча антенны 1 за время гПр в секторе обзора (Е, Е + ) по закону tnp(©) (или GVip(t). Этот же второй импульс поступает на вход СТ 15, на выходе которого появляется импульс. Импульс с выхода СТ 15 поступает на первый вход элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 17, а т.к. на втором его входе присутствует нулевой уровень с выхода СТ 1 б, то этот импульс появляется на выходе элемента ИСКЛЮЧАЮЩЕЕ ИЛИ 17 и устанавливает триггеры 9 и 10 в единичное состояние. Единичный сигнал с выходов триггеров 9 и 10 подается на входы ИВИ соответственно 12 и 13. ИВИ 11, 12 и 13 работают, например, по методу счетных импульсов. С момента подачи единичного сигнала ИВИ 12 и 13 начинают измерение. Отраженный от цели радиоимпульс (фиг. 1, 2) принимается антенной 1 и через АП 3 поступает на вход приемника 5. С выхода
0
приемника 5 видеоимпульс поступает на входы УФИОС 6 и 7 (например, одновибра- торы). Причем УФИОС 6 формирует импульс, фронт которого соответствует спаду,
а УФИОС 7 - импульс, фронт которого соответствует фронту видеоимпульса приемника 5. Импульс с выхода УФИОС 7 поступает на вход установки в нулевое состояние триггера 10, на выходе которого появится нуле0 вой потенциал. Нулевой потенциал с выхода триггера 10 поступает на вход ИВИ 13, что соответствует моменту окончания измерения. Результат измерения (например, код) ti с выхода ИВИ 13 поступает на первый вход
5 микропроцессора 14. Импульс с выхода УФИОС 6 переведет триггер 9 из единичного в нулевое состояние. Нулевой потенциал с выхода триггера 9 поступит на вход ИВИ 12, что будет соответствовать моменту окончания измерения. Результат измерения п с выхода ИВИ 12 поступает на второй вход процессора 14.
Через определенное время гп после окончания сканирования луча антенны на
5 прием tnp(6b63) fnp синхрогенератор 18 вырабатывает третий импульс. Этот им- пульс с выхода синхрогенератора 18 поступает на вход АП 3, который подключает выход передатчика 4 ко входу антенны 1, и на вход СУА 2, которая обеспечивает сканирование луча антенны 1 за время длительности импульса Тимп передатчика 4 в заданном секторе (Ok EVi + вобз) по закону tnep(6) (или GViep(t)). Этот же третий импульс с выхода синхрогенератора 18 подается на вход СТ 15. По окончанию действия импульса передатчика 4 (tnep() Тимп. (Тимп) бЬбз) СУА 2 переводит луч антенны 1 в начальное направление Эй. Через время Тпп синхрогенератор 18 вырабатывает четвертый импульс. По четвертому импульсу синхрогенератора 18 АП 3 подключает выход антенны 1 ко входу приемника 5, а СУА 2 обеспечивает сканирование луча антенны 1 за время гпр в секторе обзора по закону tnp(3) (или (t)). Этот же четвертый импульс с выхода синхрогенератора 18 подается на вход СТ 15, на выходе которого появится в торой импульс. Этот второй импульс с выхода СТ 15 подается на вход СТ 16 и первый, вход элемента Исключающий ИЛИ 17. При этом иа выходе СТ 16 появится импульс, который поступит на второй вход элемента Исключающий ИЛИ 17, поэтому на выходе элемента Исключающий ИЛИ 17 не появится импульса, т.е. будет нулевой потенциал. Этот нулевой потенциал с выхода элемента Исключающий ИЛИ 17 подается на входы установки в
0
5
0
5
0
5
единичное состояние триггеров 9 и 10, поэтому триггеры 9 и 10 останутся в нулевом состоянии. Импульс с выхода СТ 16 поступает на вход установки в единичное состояние триггера 8 и переведет его из нулевого в единичное состояние. Единичный сигнал с выхода триггера 8 подается на вход ИВИ 11, который начинает измерение. Отраженный от движущейся цели радиоимпульс (фиг. 1, 2) принимается антенной 1 и через АП 3 подается на вход приемника 5. Видеоимпульс с выхода приемника 5 поступает на входы УФИОС 6 и 7, на выходах которых появятся импульсы. Импульсы с выходов УФИОС 6 и 7 поступают на входы установки в нулевое состояние (Сброс) триггеров 8, 9 и 10. В результате этого триггеры 9 и 10 не изменят своего нулевого состояния, а триггер 8 перейдет из единичного в нулевое состояние. Этот переход произойдет в момент прихода импульса с выхода УФИОС б, который формирует импульс, фронт которого совпадает со спадом видеоимпульса на выходе приемника 5. Момент появления нулевого потенциала на выходе триггера 8 (т.е. на входе ИВИ 11) соответствует моменту окончания измерения для ИВИ 11. Результат измерения Т2 с выхода ИВИ 11 поступает на третий вход процессора 14. После прихода сигнала на третий вход процессор 14 производит вычисления в соответствии с алгоритмом
,, с VT - -тг
01 - ©2 ) Гимп - tnep( ©1 ) Тпп + М j
То tnep ( ©1 ) + tnep ( ©2 )
(19)
где ©о - ширина луча антенны (например, по уровню половинной мощности);40
D -§- Гимп - tnep( ©1 ) + ГПП + tl. (20)
- дальность до цели (фиг. 1, 2).
Таким образом, по сравнению с известным предлагаемый способ измерения тангенциальной скорости объекта позволяет повысить точность измерения VT на величину (18) однопунктной системой локации, использующей метод сверхсканирования, за счет учета различий длительностей излучаемых сигналов с изменением направления их прихода вследствие тангенциального движения цели, т.е. достигнута поставленная цель изобретения.
Формула изобретения Способ определения тангенциальной составляющей скорости объекта, включающий излучение импульса длительностью Гимп и периодом повторения То, прием отраженного сигнала при сверхбыстром сканировании луча антенны в секторе ©Ьбз за время Тимп и определение скорости по результатам обработки принятых сигналов, отличающийся тем, что, с целью повышения точности измерения, измеряют дальность D до объекта и направление 0i прихода принятого сигнала, через время Т0 после излучения импульса излучают повторный импульс и принимают отраженный сигнал, измеряют направление 02 его прихода, а тангенциальную составляющую скорости VT объекта определяют по формуле
35
VT
То - tnep ( 07) + tnep ( ©2 )
где tnep(0) - закон сканирования луча антенны при излучении радиоимпульса,
feJ
| Гинзбург В.М | |||
| Формирование и обработка изображений в реальном времени | |||
| М,: Сов.радио, 1986, с | |||
| Нивелир для отсчетов без перемещения наблюдателя при нивелировании из средины | 1921 |
|
SU34A1 |
