Изобретение относится к вычислительной технике и может быть использовано для фильтрации сигналов в специализированных аналоговых и гибридных ЭВМ, а также для формирования программного обеспечения ЦВМ.
Известны различные структуры оптимального фильтра Калмана, позволяющие получать линейную несмешанную оценку наблюдаемой системы на основе результатов измерений. При этом оптимальная оценка получается при известном значении априорной информации о параметорах наблюдаемой системы, а также интенсивности шума системы и измерений. При грубой априорной информации или изменении состояния системы на выходе фильтра увеличиваются случайные ошибки и условие несмещенности оценки не обеспечиваются.
Наиболее близким к изобретению является фильтр Калмана, содержащий последовательно соединенные вычитающий сумматор 1, блок 2 переменных коэффицинтов усиления, сумматор 3, интегратор 4, с выхода которого отфильтрованный сигнал в качестве обратной связи поступает на второй вход вычитающего сумматора 1 и через блок 5 постоянных коэффициентов процесса - на второй вход сумматора 3.
Недостатком такого фильтра является низкая точность фильтрации нестационарных процессов, особенно в условиях неточной априорной информации. что значительно снижает область применения фильтра.
Цель изобретения - повышение точности фильтрации нестационарных процессов и расширение области применения.
Это достигается тем, что для оценивания нестационарных процессов основной фильтр Калмана дополнен фильтром коррекции с элементами и связями, аналогичными основному фильтру, и блоком постоянных коэффициентов, причем вход фильтра коррекции соединен с выходом первого сумматора основного фильтра, а с выхода фильтра коррекции сигнал поступает через блок постоянных коэффициентов на третий вход сумматора.
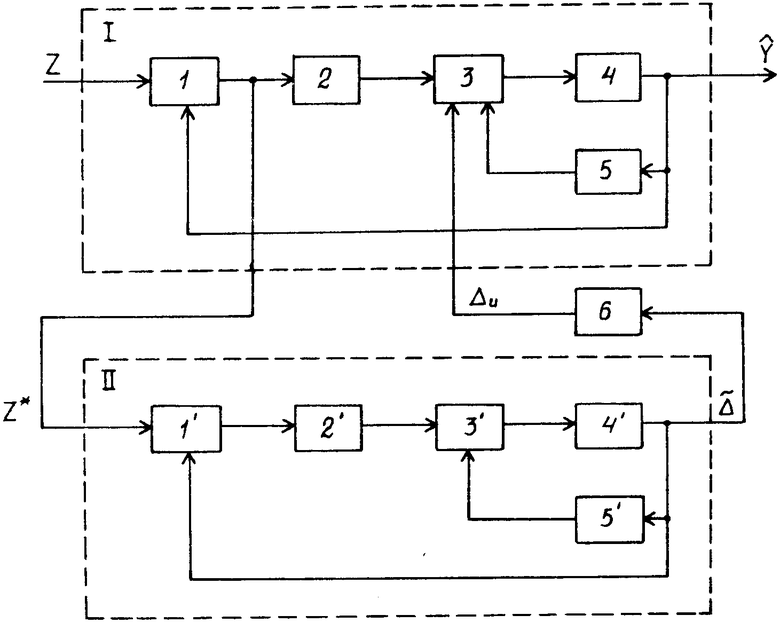
На фиг. представлена структурная схема предлагаемого фильтра.
На схеме обозначены основной фильтр Калмана I, фильтр II коррекции, вычитающий сумматор 1,1', блок 2,2' переменных коээфифициентов усиления, сумматор 3,3", интегратор 4, 4'. блок 5.5' постоянных коэффициентов, дополнительный блок 6 постоянных коэффициентов, Z входной сигнал, выходной сигнал основного фильтра, Z* = Z - - невязка, - выходной сигнал фильтра коррекции, - корректирующее воздействие.
Адаптичный фильтр работает следующим образом.
На вход основного фильтра поступают результаты измерения. Эта информация на сумматоре 1 сравнивается с авыходной величиной основного фильтра. В результате этого формируется невязка, которая через блок переменных коэффициентов усиления поступает на остальные блоки фильтра Калмана. На выходе интегратора 4 формируется оценка измерений. Одновременно невязка Z*, содержащая случайную и систематическую составляющие с выхода сумматора 1 поступает на фильтр коррекции. Фильтр коррекции производит обработку информации аналогично основному фильтру. На его выходе формируется оценка невязки , соответствующая величине смещления с отфильтрованной случайной составляющей, которая поступает на блок 6 постоянных коэффициентов, где умножается на соответствующее значение весового коэффициента и подается в виде величины на третий вход сумматора 3. В результате этого осуществляется коррекция основного фильтра и устраняется смещение в оценке .
Дополнение известного фильтра Калмана фильтром коррекции, имеющим ту же структуру, что и фильтр Калмана, выгодно отличает предлагаемое устройство от прототипа, т. к. позволяет повысить точность фильтрации нестационарных процессов в условиях грубой кприорной информации за счет выделения в "чистом виде" величины смещения с последующей коррекцией выходного сигнала, что позволяет расширить область применения предлагаемого фильтра. (56) Казаков И. Е. Статистическая теория систем управления в пространстве состояний. , М. : Наука, 1975, с. 147-155, рис. 3,2.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ ФИЛЬТР ДЛЯ ОЦЕНИВАНИЯ НЕСТАЦИОНАРНЫХ ПРОЦЕССОВ | 1993 |
|
RU2110883C1 |
| АДАПТИВНЫЙ ФИЛЬТР ТЕЛЕМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ ДЛЯ РАБОТЫ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЁННОСТИ | 2019 |
|
RU2736282C1 |
| РОБАСТНЫЙ СТОХАСТИЧЕСКИЙ ФИЛЬТР | 2024 |
|
RU2826922C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С ОБНАРУЖИТЕЛЕМ МАНЕВРА И АДАПТИВНОЙ КОРРЕКЦИЕЙ ПРОГНОЗА | 2005 |
|
RU2296348C2 |
| Цифровой фильтр для нестационарных сигналов | 2020 |
|
RU2747199C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С КОРРЕКТИРУЕМЫМ ФИЛЬТРОМ | 1999 |
|
RU2156477C1 |
| ДВУХДИАПАЗОННЫЙ СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ | 2000 |
|
RU2181899C2 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
Использование: вычислительная техника для фильтрации сигналов в специализированных и гибридных ЭВМ, а также для формирования программного обеспечения ЭВМ. Сущность изобретения: для повышения точности фильтрации нестационарных процессов в структуру известного фильтра Калмана введены дополнительные элементы и связи, реализующие оптимальную коррекцию фильтра по среднеквадратическому критерию Красовского и включающими дополнительный фильтр оценивания "невязки", которая используется для выработки корректирующего воздействия в соответствии с алгоритмами нетерминального управления. 1 ил.
АДАПТИВНЫЙ ФИЛЬТР ДЛЯ ОЦЕНИВАНИЯ НЕСТАЦИОНАРНЫХ ПРОЦЕССОВ, содержащий фильтр Калмана, вход которого является информационным входом адаптивного фильтра, а выход - выходом адаптивного фильтра и выполнен на последовательно соединенных вычитающем сумматоре, неинвертирующий вход которого является входом фильтра Калмана, блок переменных коэффициентов усиления, сумматор и интегратор, выход которого является выходом фильтра Калмана и соединен с инвертирующим входом вычитающего сумматора, а с вторым входом сумматора - через блок постоянных коэффициентов, отличающийся тем, что, с целью повышения точности оценивания нестационарных процессов, введен корректирующий фильтр, аналогичный фильтру Калмана, вход которого соединен с выходом вычитающего сумматора, а выход через введенный дополнительный блок постоянных коэффициентов соединен с дополнительным входом сумматора.
