Изобретение относится к корабельным техническим системам, в том числе к корабельному вооружению, а именно к обработке телеметрических измерений, получаемых в реальном времени.
Известен цифровой фильтр Калмана, содержащий последовательно соединенные первый сумматор, первый вход которого является входом фильтра, первый умножитель и второй сумматор, а также последовательно соединенные элементы задержки, второй умножитель выход которого соединен с вторым входом второго сумматора и третий умножитель выход которого соединен с вторым входом первого сумматора. При этом вторые входы первого, второго и третьего умножителей являются первым, вторым и третьим входами коэффициентов цифрового фильтра Калмана [см. Patent US 07654111 Class: G01S 13/723 "Method of Kalman filtering for estimating the position and velocity of a tracked object]. Недостатком цифрового фильтра Калмана является то, что он выполняет оценку (обработку) измерений, т.е. выделяет полезный сигнал на фоне шумов, обусловленных погрешностями измерений, только в том случае, когда априорно известны дисперсии помех (шумов), формирующие коэффициент усиления первого умножителя.
Известны субоптимальные цифровые фильтры, в том числе модифицированный и адаптивный фильтр Калмана [см. Патент СССР SU1434539, Класс: Н03Н 21/00 «Модифицированный фильтр Калмана», Патент РФ №2110883, класс Н03Н 21/00, «Адаптивный фильтр для оценивания нестационарных процессов»], однако они не лишены указанных выше недостатков.
В качестве прототипа выбран классический цифровой фильтр Калмана, содержащий последовательно соединенные первый сумматор, первый вход которого является входом фильтра, первый умножитель и второй сумматор, а также последовательно соединенные элементы задержки, второй умножитель выход которого соединен с вторым входом второго сумматора и третий умножитель выход которого соединен с вторым входом первого сумматора. Вторые входы первого, второго и третьего умножителей являются первым, вторым и третьим входами коэффициентов цифрового фильтра Калмана. Недостатком прототипа является отсутствие возможности получить несмещенные состоятельные оценки измерительной информации в условиях отсутствия точной информации о дисперсии шума.
Задачей изобретения является обеспечение возможности реализовывать процесс оценивания измерительной информации, т.е. выделения полезного сигнала на фоне шумов, в условиях отсутствия информации о значениях дисперсии шума.
Технический результат достигается за счет того, что в прототип добавлен первый и второй вычислитель ковариации, четвертый и пятый умножитель, третий сумматор и делитель. Вычислитель ковариации - это блок, определяющий значение ковариации поступающего на вход сигнала. Вычислитель ковариации содержит следующие последовательно соединенные элементы: память, усреднитель, сумматор, память, усреднитель.
Работа адаптивного фильтра базируется на следующих математических предпосылках.
Пусть наблюдаемый телеметрический сигнал представляет взвешенный полезный сигнал х(t) и возмущенный шум ν(t):

где В - инвариантная во времени матрица коэффициентов наблюдения.
Пусть в качестве физической модели полезного сигнала выступает дискретный рекурсивный авторегрессионный фильтр первого порядка возмущенный внутренним шумом w(t):

где А - инвариантная во времени матрица коэффициентов перехода состояний.
Пусть априорная и апостериорная оценки наблюдаемого полезного сигнала
определяются следующими выражениями:


В уравнении (4) К - матрица коэффициентов усиления фильтра, минимизирующая расстояние между истинными и оценочными значениями наблюдаемого полезного сигнала, z - расстояние между истинным и оценочным значением наблюдаемого полезного сигнала в момент времени t.

Отличием математической составляющей изобретения от цифрового фильтра Калмана является уравнение, необходимое для определения значений матрицы коэффициентов усиления фильтра К:

где Tt - это выборочных значения автоковариационной матрицы наблюдений с задержкой в один отсчет:

 - автоковариационная матрица оценок наблюдаемого полезного сигнала, которая вычисляется по следующей рекурсивной формуле:
- автоковариационная матрица оценок наблюдаемого полезного сигнала, которая вычисляется по следующей рекурсивной формуле:

Предлагаемый адаптивный фильтр работает следующим образом.
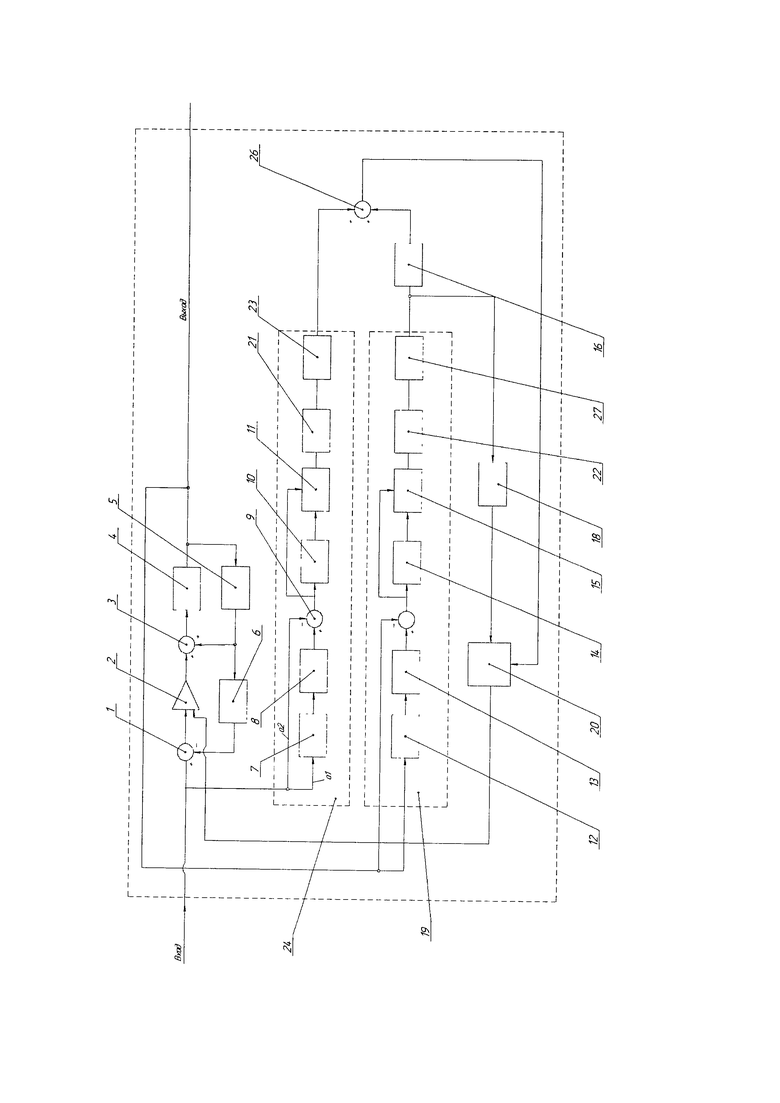
Отсчеты обрабатываемого сигнала, поступающие с измерительного устройства, поступают на вход первого сумматора 1, который является входом фильтра.
Параллельно каждый пришедший на обработку отсчет сигнала поступает на вход первого вычислителя ковариации 24 (вычисления производятся по формуле (7)).
Первый блок вычисления ковариации 24 работает следующим образом. Отсчет измеренного значения сигнала с входа фильтра по информационному каналу связи а1 поступает в ячейку памяти 7 и, параллельно, по информационному каналу связи а2 поступает на второй вход сумматора 9. На выходе сумматора 9 формируется сигнал, равный расстоянию между средним значением отсчетов измеренного сигнала поступивших до дискретного момента времени t, и текущим значением сигнала. Среднее значение отсчетов измеренного сигнала, поступивших на вход фильтра до дискретного момента времени t определяется в блоке 8, используя набор отсчетов, хранящийся в ячейке памяти 7.
Сигнал, сформированный на выходе сумматора 9, поступает на второй вход умножителя 11. На первый вход умножителя 11 поступает сигнал, сформированный на выходе умножителя 9, но смещенный на один шаг назад в блоке задержки 10.
Сигнал, сформированный в блоке 11, последовательно поступает в ячейку памяти 21 и в усреднитель 23, на выходе которого формируется значение ковариации сигнала, поступившего на вход ячейки памяти 7 в дискретный момент времени t.
На выходе первого сумматора 1 формируется невязка, вычисленная по формуле (5), которая поступает на вход умножителя 2, где она взвешивается коэффициентом усиления фильтра (6).
Сигнал, взвешенный в блоке 2, поступает на вход второго сумматора, где происходит коррекция оценочных значений сигнала (формула (4)), после чего скорректированная оценка сигнала поступает в блок задержки на один шаг 4, на вход третьего умножителя 5, на второй вход второго сумматора 3, на вход четвертого умножителя 6 и на вход второго вычислителя ковариации 19, инициализируя его работу. Работа второго блока вычисления ковариации 19 аналогична работе первого блока вычисления ковариации 24.
Выходной сигнал с блока 24 поступает на вход четвертого умножителя 16, а также на вход пятого умножителя 18. Взвешенное значение ковариации оценок сигнала, сформированное в блоке 16, поступает на первый вход сумматора 26. На второй вход сумматора 26 поступает выходной сигнал блока расчета ковариации входных отсчетов 24. Сигнал, сформированный на выходе сумматора 26, поступает на второй вход делителя 20, на выходе которого формируется коэффициент усиления фильтра, определяемый формулой (6), поступающий на второй вход первого умножителя 2.
Выходной сигнал фильтра формируется на выходе умножителя 4.
Внедрение предлагаемого адаптивного фильтра повысит эффективность решения задач позиционирования в пространстве, как управляемых, так и беспилотных аппаратов морского базирования путем повышения достоверности результатов обработки измерительной информации, получаемой со штатных датчиков, а также РЛС. Основным преимуществом адаптивного фильтра по сравнению с существующими алгоритмами является то, что он может быть использован для решения задач оценки кинематических параметров движения беспилотных летательных аппаратов (БЛА), например, в ходе посадки БЛА на движущееся судно или при наведении БЛА на маневрирующую цель в условиях априорной неопределенности.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивное фильтрующее устройство | 1987 |
|
SU1436271A1 |
| МОДИФИЦИРОВАННЫЙ ФИЛЬТР КАЛМАНА | 1992 |
|
RU2160496C2 |
| РОБАСТНЫЙ СТОХАСТИЧЕСКИЙ ФИЛЬТР | 2024 |
|
RU2826922C1 |
| Цифровой фильтр для нестационарных сигналов | 2020 |
|
RU2747199C1 |
| АДАПТИВНЫЙ ВЫЧИСЛИТЕЛЬ ДЛЯ РЕЖЕКТИРОВАНИЯ ПОМЕХ | 2015 |
|
RU2582874C1 |
| Анализатор спектра с линейным предсказанием | 1985 |
|
SU1275315A1 |
| СПОСОБ ИЗМЕРЕНИЯ МЕЖДУПЕРИОДНОГО КОЭФФИЦИЕНТА КОРРЕЛЯЦИИ ПАССИВНЫХ ПОМЕХ | 2009 |
|
RU2419809C1 |
| СПОСОБ АДАПТИВНОГО СОПРОВОЖДЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2018 |
|
RU2679598C1 |
| СПОСОБ ФИЛЬТРАЦИИ ПАРАМЕТРОВ ТРАЕКТОРИИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2307376C1 |
| СПОСОБ РАДИОПЕЛЕНГОВАНИЯ И РАДИОПЕЛЕНГАТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2598648C1 |
Изобретение относится к корабельным техническим системам, в том числе к корабельному вооружению, а именно к обработке телеметрических измерений, получаемых в реальном времени. Адаптивный фильтр телеметрических измерений предназначен для выделения полезного сигнала на фоне шумов, а также оценки ненаблюдаемых состояний в условиях отсутствия достоверной априорной информации о параметрах шума в ходе решений задач позиционирования управляемых и беспилотных аппаратов морского базирования. Указанный технический результат достигается тем, что в конструкцию известного фильтра Калмана добавлен делитель, два блока вычисления ковариации, два блока умножения и один сумматор. Добавленные блоки позволяют в процессе работы адаптивного фильтра определять значения коэффициентов усиления фильтра в условиях, когда неизвестны истинные значения дисперсий шумов измеренного сигнала. Основным преимуществом адаптивного фильтра в сравнении с существующими фильтрами является то, что он может быть использован в условиях априорной неопределенности в реальном масштабе времени для обработки телеметрических измерений, поступающих с объектов, движущихся с большой скоростью и имеющих стохастическую природу, в том числе нестационарную. 1 ил.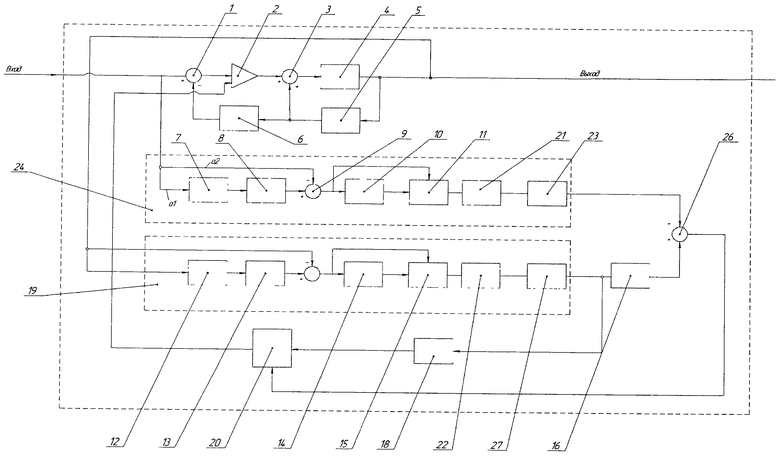
Адаптивный фильтр телеметрических измерений, содержащий последовательно соединенные первый сумматор, первый вход которого является входом фильтра, первый умножитель и второй сумматор, а также последовательно соединенные элементы задержки, второй умножитель, выход которого соединен с вторым входом второго сумматора, и третий умножитель, выход которого соединен с вторым входом первого сумматора, отличающийся тем, что в фильтр включены делитель, первый и второй блоки вычисления ковариации, выполненные аналогично друг другу, четвертый и пятый умножители, третий сумматор, вход первого блока вычисления ковариации связан со входом фильтра, на выходе первого блока вычисления ковариации формируются значения ковариации сигнала в дискретный момент времени, блок задержки связан со входом второго блока вычисления ковариации, выходной сигнал которого поступает на вход пятого умножителя, связанного с делителем, и на вход четвертого умножителя, связанного с первым входом третьего сумматора, сигнал с которого поступает на соответствующий вход делителя, выход которого связан со вторым входом первого умножителя, сигнал, взвешенный в первом умножителе, поступает на вход второго сумматора, где происходит коррекция оценочных значений сигнала.
| US 2009322590 A1, 31.12.2009 | |||
| US 7710316B1, 04.05.2010 | |||
| WO2011126605A2, 13.10.2011 | |||
| US 5051751A, 24.09.1991 | |||
| АДАПТИВНЫЙ ФИЛЬТР ДЛЯ ОЦЕНИВАНИЯ НЕСТАЦИОНАРНЫХ ПРОЦЕССОВ | 1993 |
|
RU2110883C1 |

