Изобретение относится к вычислительной технике и может быть использовано для фильтрации сигналов в специализированных аналоговых и гибридных ЭВМ, а также для формирования программного обеспечения ЦВМ.
Традиционная теория оптимального оценивания требует знания точной математической модели наблюдаемого процесса, а также статистических характеристик его шумов и шумов измерений [1-7]. На практике такое условие трудно обеспечить. В этих случаях традиционные методы фильтрации оказываются неприемлемыми. Наличие априорной неопределенности приводит к тому, что при реализации алгоритмов фильтрации возникают проблемы, связанные с устранением "расходимости" фильтра. Все применяемые методы устранения указанных недостатков связаны с изменением веса измерений [8,9] и приводят к созданию алгоритмов субоптимальной фильтрации и снижению качества процесса оценивания.
Наиболее близким к предлагаемому является фильтр Калмана [3], структура которого представлена на чертеже. Этот фильтр содержит последовательно соединенные вычитающий сумматор 1, блок переменных коэффициентов усиления 2, сумматор 3, интегратор 4, с выхода которого отфильтрованный сигнал в качестве обратной связи поступает на второй вход вычитающего сумматора 1, блок постоянных коэффициентов 5, выход которого соединен с вторым входом сумматора 3.
Недостатком такого фильтра является низкая точность оценивания нестационарных процессов, особенно в условиях наличия неточной априорной информации о наблюдаемом процессе. Это значительно ограничивает область применения фильтра.
Техническим результатом изобретения является повышение точности фильтрации нестационарных процессов и обеспечение устойчивой работы фильтра в широком диапазоне условий изменения входного сигнала для расширения области применения.
Сущность изобретения заключается в том, что фильтр Калмана дополнен фильтром коррекции с элементами и связями, аналогичными фильтру Калмана, и блоком весовых коэффициентов, причем вход фильтра коррекции соединен с выходом вычитающего сумматора фильтра Калмана, а выход фильтра коррекции через блок весовых коэффициентов соединен с дополнительными входами сумматоров обоих фильтров.
На чертеже представлена блок-схема адаптивного фильтра.
Фильтр состоит из фильтра Калмана I, фильтра коррекции II, вычитающих сумматоров 1,1', блоков переменных коэффициентов усиления 2,2', сумматоров 3,3', интеграторов 4,4', блоков постоянных коэффициентов 5,5', блока весовых коэффициентов 6.
Адаптивный фильтр работает следующим образом.
На вход фильтра Калмана поступают результаты измерений. Эта информация на сумматоре 1 сравнивается с выходной величиной  фильтра Калмана. В результате этого формирует невязка Z*, которая через блок переменных коэффициентов усиления 2 поступает на сумматор 3 и далее на интегратор 4. На выходе интегратора 4 формируется оценка измерений
фильтра Калмана. В результате этого формирует невязка Z*, которая через блок переменных коэффициентов усиления 2 поступает на сумматор 3 и далее на интегратор 4. На выходе интегратора 4 формируется оценка измерений  . Одновременно невязка Z*, содержащая случайную и систематическую составляющие, с выхода сумматора 1 поступает на фильтр коррекции. Фильтр коррекции производит обработку информации аналогично фильтру Калмана. На его выходе формируется оценка невязки
. Одновременно невязка Z*, содержащая случайную и систематическую составляющие, с выхода сумматора 1 поступает на фильтр коррекции. Фильтр коррекции производит обработку информации аналогично фильтру Калмана. На его выходе формируется оценка невязки  , которая поступает на блок весовых коэффициентов 6 и в вид величины Δu подается на дополнительные входы сумматоров 3 и 3'. В результате этого осуществляется настройка как фильтра Калмана, так и фильтра коррекции, устраняется смещение при получении оценки
, которая поступает на блок весовых коэффициентов 6 и в вид величины Δu подается на дополнительные входы сумматоров 3 и 3'. В результате этого осуществляется настройка как фильтра Калмана, так и фильтра коррекции, устраняется смещение при получении оценки  и обеспечивается устойчивая работа фильтра в широком диапазоне условий изменения входного сигнала.
и обеспечивается устойчивая работа фильтра в широком диапазоне условий изменения входного сигнала.
Дополнение известного фильтра Калмана фильтром коррекции, имеющим ту же структуру, что и фильтр Калмана, позволяет повысить точность фильтрации существенно нестационарных процессов в условиях наличия грубой априорной информации о наблюдаемом процессе за счет выделения величины смещения выходного сигнала с последующей его коррекцией. Это позволяет расширить область применения предлагаемого фильтра.
Источники информации
1. Андреев Н.И. Теория статистически оптимальных систем управления. - М. : Наука, 1980.
2. Браммер К. и Зиффлинг Г. Фильтр Калмана-Бьюиси. - М.: Наука, 1982.
3. Казаков И.Е. Статистическая теория систем управления в пространстве состояний. М.: Наука, 1975.
4. Основы автоматического управления. /Под ред. В.С.Пугачева. Изд. З. - М.: Наука, 1974.
Пугачев В. С. и Синицын И.Н. Стохастические дифференциальные системы. - М.: Наука, 1985.
Сейдж Э. П. и Уайт С.Ч. Оптимальное управление системами. - М.: Радио и связь, 1982.
7. Справочник по теории автоматического управления. /Под ред. А.А.Красовского. - М.: Наука, 1987.
8. Фильтрация и стохастическое управление в динамических системах. /Под ред. К.Т. Леондеса. - М.: Мир, 1980.
9. Кузовков Н. Т. и Салычев О.С. Инерциальная навигация и оптимальная фильтрация. - М.: Машиностроение, 1982.
| название | год | авторы | номер документа |
|---|---|---|---|
| АДАПТИВНЫЙ ФИЛЬТР ДЛЯ ОЦЕНИВАНИЯ НЕСТАЦИОНАРНЫХ ПРОЦЕССОВ | 1990 |
|
RU2012997C1 |
| РОБАСТНЫЙ СТОХАСТИЧЕСКИЙ ФИЛЬТР | 2024 |
|
RU2826922C1 |
| Цифровой фильтр для нестационарных сигналов | 2020 |
|
RU2747199C1 |
| Робастный стохастический фильтр | 2021 |
|
RU2755677C1 |
| УСТРОЙСТВО ДЛЯ НАСТРОЙКИ КОРРЕКТОРА МЕЖСИМВОЛЬНОЙ ИНТЕРФЕРЕНЦИИ | 1991 |
|
RU2034404C1 |
| ДЕКОМПОЗИЦИОННЫЙ ЛИНЕЙНЫЙ ФИЛЬТР | 2000 |
|
RU2170946C1 |
| АДАПТИВНАЯ СИСТЕМА ТЕРМИНАЛЬНОГО УПРАВЛЕНИЯ | 2012 |
|
RU2500009C1 |
| АДАПТИВНЫЙ ФИЛЬТР ТЕЛЕМЕТРИЧЕСКИХ ИЗМЕРЕНИЙ ДЛЯ РАБОТЫ В УСЛОВИЯХ АПРИОРНОЙ НЕОПРЕДЕЛЁННОСТИ | 2019 |
|
RU2736282C1 |
| СЛЕДЯЩИЙ ИЗМЕРИТЕЛЬ С ОБНАРУЖИТЕЛЕМ МАНЕВРА И АДАПТИВНОЙ КОРРЕКЦИЕЙ ПРОГНОЗА | 2005 |
|
RU2296348C2 |
| СПОСОБ ОБРАБОТКИ СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ АЛГОРИТМА СИГМА-ТОЧЕЧНОГО ФИЛЬТРА КАЛМАНА | 2024 |
|
RU2840100C1 |
Адаптивный фильтр для оценивания нестационарных процессов относится к вычислительной технике и может использоваться для фильтрации сигналов в специализированных и гибридных ЭВМ, а также для формирования программного обеспечения ЭВМ. Для повышения точности и устойчивости фильтрации нестационарных процессов в структуру общеизвестного фильтра Калмана введены дополнительные элементы и связи, реализующие оптимальную коррекцию фильтра по среднеквадратическому критерию Красовского и включающий фильтр коррекции - фильтр оценивания "невязки", которая используется для настройки основного фильтра и фильтра коррекции с применением алгоритма нетерминального управления. 1 ил.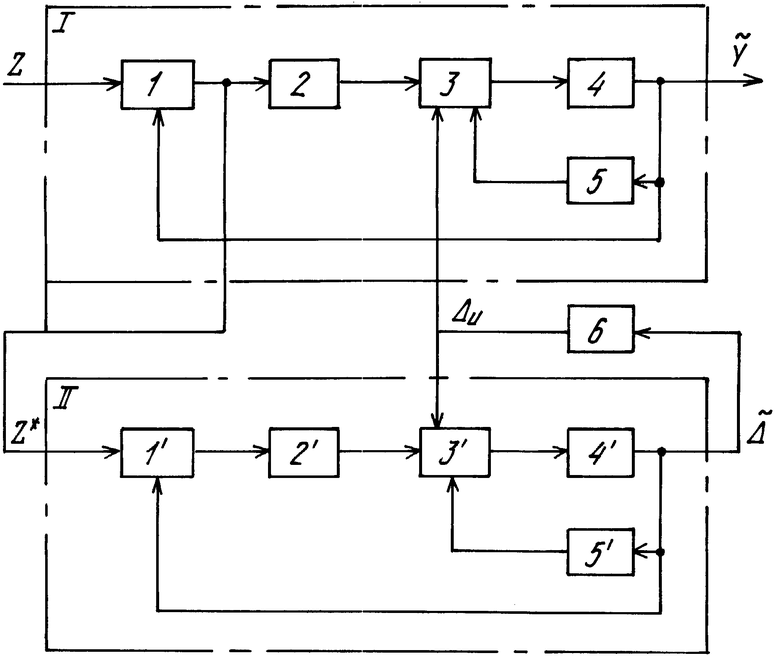
Адаптивный фильтр для оценивания нестационарных процессов, содержащий фильтр Калмана, вход которого является информационным входом адаптивного фильтра, а выход - выходом адаптивного фильтра и выполнен на последовательно соединенных вычитающем сумматоре, неинвертирующий вход которого является входом фильтра Калмана, блоке переменных коэффициентов усиления, сумматоре и интеграторе, выход которого является выходом фильтра Калмана и соединен с инвертирующим входом вычитающего сумматора, а с вторым входом сумматора - через блок постоянных коэффициентов, отличающийся тем, что введены корректирующий фильтр, аналогичный фильтру Калмана, и блок весовых коэффициентов, выход которого соединен с дополнительными входами сумматоров фильтра Калмана и корректирующего фильтра, вход которого соединен с выходом вычитающего сумматора фильтра Калмана, а выход - с входом блока весовых коэффициентов.
| Казаков И.Е | |||
| Статистическая теория систем управления в пространстве состояний | |||
| - М.: Наука, 1975, с | |||
| Раздвижной паровозный золотник со скользящими по его скалке поршнями и упорными для них шайбами | 1922 |
|
SU147A1 |
