Изобретение относится к транспортному машиностроению и может быть использовано в тормозных системах, обеспечивающих предотвращение блокирования колес при торможении.
Известно противоблокировочное устройство автомобиля, содержащее регулирующие контуры для каждого колеса, при этом каждый регулирующий контур включает в себя датчик динамического состояния колеса, подключенный к электронному блоку обработки данных, подключенному к источнику тока и имеющему схему формирования опорной скорости и предохранительную схему, управляющую электронным выключателем, а также регулирующий тормозное давление электромагнитный клапан, подключенный к электронному блоку, причем схема формирования сигнала опорной скорости и предохранительная схема выполнены в виде интегральных узлов, а предохранительная схема одного регулирующего контура размещена в интегральном узле другого регулирующего контура (Патент СССР N 1405695, кл. В 60 Т 8/62, Бюл. N 23, 1988).
Наиболее близким к изобретению является противоблокировочное устройство для тормозной системы транспортного средства, содержащее датчики динамического состояния колес, выход которых через формирователи сигнала скорости связаны с микропроцессорными вычислителями для каждой пары колес, датчик начала торможения, блоки контроля параметров и сигнализации, соединительные магистрали и согласующие усилители, входы которых подключены к выходам микропроцессорных вычислителей, а выходы - к соленоидам регулирующих клапанов, установленных в тормозных контурах колес, причем функции блоков контроля параметров и сигнализации программно реализованы в микропроцессорных вычислителях, а сами микропроцессорные вычислители выполнены в виде однокристалльных микроЭВМ [1] .
Недостатком известных устройств является невозможность контроля эффективности тормозной системы в эксплуатационных условиях.
При торможении транспортного средства, оборудованного противоблокировочным устройством, практически не остается видимых следов на дороге.
Это обстоятельство не позволяет проконтролировать эффективность торможения транспортного средства в эксплуатационных условиях на соответствие величинам, предписанным инструкцией или другими нормативными документами.
Цель изобретения - обеспечение возможности контроля эффективности тормозной системы в процессе эксплуатации.
Цель достигается тем, что устройство, содержащее датчики динамического состояния колес, выходы которых через формирователи сигнала скорости связаны с микропроцессорными вычислителями для каждой пары колес, датчик начала торможения, блоки контроля параметров и сигнализации, соединительные магистрали и согласующие усилители, входы которых подключены к выходам микропроцессорных вычислителей, а выходы - к соленоидам регулирующих клапанов, установленных в тормозных контурах колес, причем функции блоков контроля параметров и сигнализации программно реализованы в микропроцессорных вычислителях, а сами микропроцессорные вычислители выполнены в виде однокристалльных микроЭВМ, снабжено дополнительным блоком контроля эффективности тормозной системы, цифровым индикатором и электрическим выключателем, причем входы указанного блока подключены к входам микропроцессорных вычислителей, связанным с формирователями сигнала скорости ведомых колес, и электрическому выключателю, выход - к упомянутому цифровому индикатору, а сам блок выполнен в виде связанных магистралями входного мультиплексора, счетчиков числа оборотов колес и времени торможения, тактового генератора, узла определения начала торможения, арифметико-логического устройства, элемента И и дополнительного вывода для подключения цифрового индикатора, причем входы счетчика времени торможения связаны с одним из выходов тактового генератора и элемента И, входы арифметико-логического устройства подключены к одному из контактов выключателя и счетчика времени торможения, а выход - к упомянутому выводу для подключения цифрового индикатора.
Целесообразно узел определения начала торможения выполнить в виде дифференциатора и элемента ИЛИ, один из выходов которого подключен к датчику начала торможения, а второй - к выходу дифференциатора, при этом сам блок выполнить в виде специализированной БИС или интегрального узла, а определение эффективности торможения осуществлять за время замедления транспортного средства с 40 до 20 км/ч и определять по формуле:
Z=  , где Z - коэффициент торможения автомобиля;
, где Z - коэффициент торможения автомобиля;
(t20-t40) - время замедления автомобиля с 40 до 20 км/ч;
0,565 - константа, определенная по формуле:
const =  , где g= 9,8 м/с2
, где g= 9,8 м/с2
Вышеперечисленные признаки являются новыми, в известных устройствах отсутствуют, следовательно, заявляемое противоблокировочное устройство отвечает критерию изобретения "Существенные отличия".
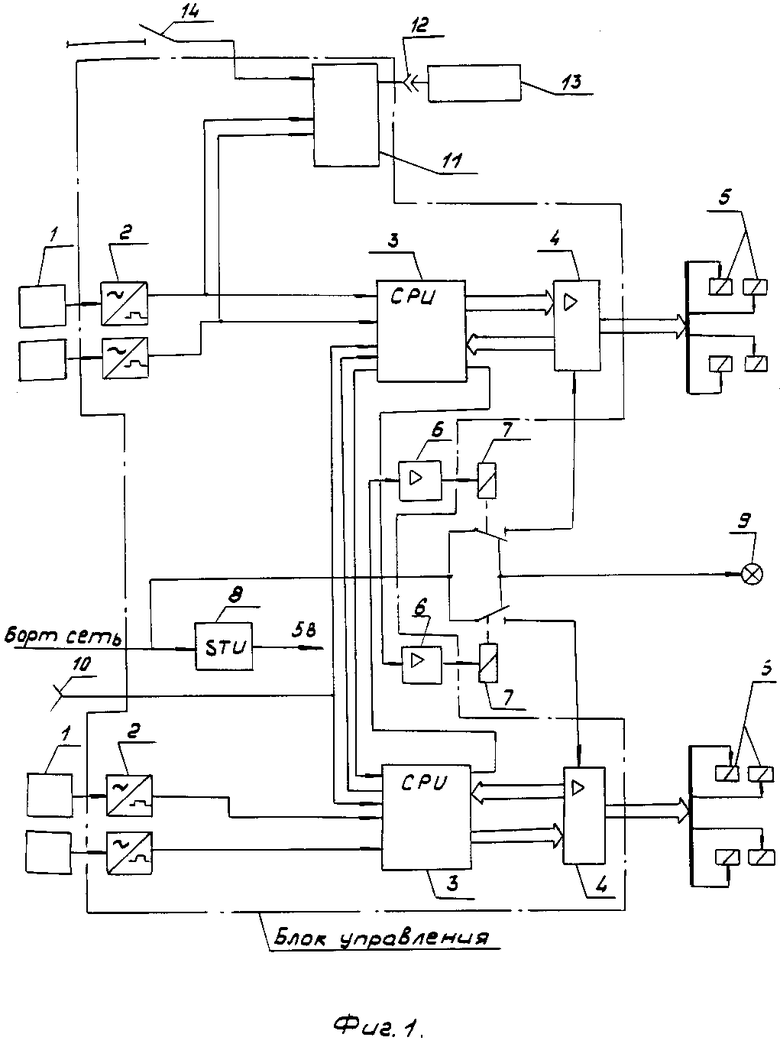
На фиг. 1 показана структурная схема противоблокировочного устройства; на фиг. 2 - пример реализации дополнительного блока контроля эффективности торможения.
Противоблокировочное устройство содержит датчики 1 динамического состояния колес, формирователи 2 сигнала датчиков, микропроцессорные вычислители 3 для каждой пары колес, датчик начала торможения (не показан), выходные согласующие усилители 4, управляющие соленоидами 5 регулирующих клапанов, согласующие усилители 6, электромагнитные реле 7, блок 8 питания, сигнальную лампу 9, диагностический разъем 10, дополнительный блок 11 контроля эффективности торможения с выводом 12 для подключения цифрового индикатора 13 и выключатель 14.
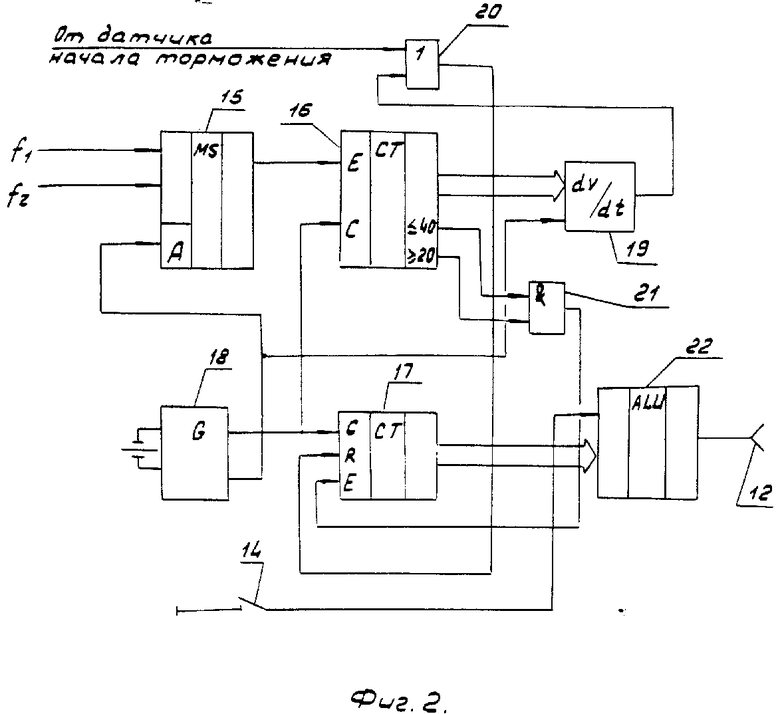
Блок 11 содержит входной мультиплексор 15, счетчики 16 и 17 частоты вращения и времени торможения, тактовый генератор 18, дифференциатор 19, элемент ИЛИ 20, элемент И 21 и арифметико-логическое устройство (АЛУ) 22.
Дифференциатор 19 и элемент ИЛИ 20 образуют узел определения начала торможения.
Входы микропроцессорных вычислителей 3 подключены к формирователям 2 сигналов датчиков 1, а выходы через согласующие усилители 4 и 6 к обмоткам соленоидов 5 и электромагнитных реле 7.
Входы блока 11 подключены к датчику начала торможения (не показан), выключателю 14 и входам вычислителя 3, связанным с формирователями 2, а его выход - к дополнительному выводу (разъему) 12 для подключения цифрового индикатора 13.
Устройство работает следующим образом.
Квазисинусоидальные сигналы с датчиков 1 скорости колес поступают на согласующие входные каскады-формирователи 2, где преобразуются в прямоугольные импульсы. Полученная информация обрабатывается вычислителями 3, которые в соответствии с заложенными в них алгоритмами управления выдают команды на выходные усилители 4, управляющие соленоидами 5 регулирующих клапанов тормозных контуров.
Сигналы квитирования, несущие информацию о состоянии соленоидов 5, поступают с выходных усилителей 4 на вычислители 3, которые через согласующие усилители 6 выдают команды на электромагнитные реле 7, подающие питание от бортсети автомобиля на усилители 4. Программное обеспечение каждого вычислителя 3 содержит подпрограмму циклического контроля функционирования другого контура. Таким образом каждый вычислитель через согласующий усилитель 6 и электромагнитное реле 7 управляет подачей напряжения на соленоиды управляющих клапанов другого контура.
При обнаружении неисправности соответствующий вычислитель снимает команду с реле и обесточивает связанные с ним электромагниты. При этом на панели приборов загорается сигнальная лампа "Авария" 9, информирующая водителя о возникновении отказа в одном из контуров регулирования.
Обмен информацией между вычислителями происходит по последовательному каналу.
Через разъем 10 производится подключение контрольно-измерительной аппаратуры.
Сигналы с датчиков 1 частоты вращения ведомых колес после формирователей 2 поступают и на входы мультиплексора 15, частота опроса которого задается тактовым генератором 18 (фиг. 1, 2).
Таким образом, сигналы с датчиков 1 частоты вращения колес поочередно подаются на вход разрешения счетчика 16, а код частоты вращения колес с выходов счетчика 16 подается на входы дифференциатора 19.
Признак торможения формируется элементом ИЛИ 20 из сигналов датчика начала торможения (при его наличии) и порогового значения замедления, вычисляемого дифференциатором 19, а признак начала и конца счета времени - элементом И 21 по пороговым значениям частоты вращения колес, соответствующим значениям скорости транспортного средства соответственно ≅40 ки/ч и ≥20 км/ч.
Процесс вычисления эффективности торможения происходит следующим образом.
Сигналы частоты вращения ведомых колес с выходов формирователей 2 поочередно поступают через входной мультиплексор 15 на вход разрешения счета счетчика 16. Используя в качестве опорного кварцованный сигнал тактовой частоты тактового генератора 18, счетчик 16 формирует сигналы пороговых значений скорости 40 км/ч и 20 км/ч и коды частоты вращения колес. Таким образом, при наличии признака торможения, формируемого элементом ИЛИ 20 из сигналов датчика торможения (не показан) и выходного сигнала "пороговое замедление" дифференциатора 19, запускается счетчик 17 времени торможения.
Вычисление эффективности торможения производится АЛУ 22 при замыкании выключателя 14. При этом на входы АЛУ 22 с выходов счетчика 17 поступает код времени торможения за время замедления транспортного средства с 40 до 20 км/ч.
АЛУ 22 производит вычисление эффективности торможения (значения коэффициента торможения) за указанное время по формуле:
Z=  , где Z - коэффициент торможения автомобиля;
, где Z - коэффициент торможения автомобиля;
(t20-t40) - время замедления автомобиля с 40 до 20 км/ч;
0,556 - константа, определенная по формуле:
const =  , где g= 9,8 м/с2
, где g= 9,8 м/с2
Вычисленное значение через вывод 12 выводится на цифровой индикатор 13.
Если выключатель 14 находится в положении "измерение", то вычисление значения коэффициента торможения будет производиться при каждом торможении транспортного средства (если начальная скорость торможения была больше 40 км/ч, а конечная стала меньше 20 км/ч) и на индикатор 13 будет выводиться значение, вычисленное при последнем торможении.
Таким образом обеспечивается возможность определения эффективности торможения транспортного средства в эксплуатационных условиях, например перед выездом на линию.
| название | год | авторы | номер документа |
|---|---|---|---|
| Противоблокировочное устройство для тормозной системы транспортного средства | 1990 |
|
SU1801823A1 |
| ПРОТИВОБЛОКИРОВОЧНАЯ ТОРМОЗНАЯ СИСТЕМА АВТОПОЕЗДА | 1993 |
|
RU2038235C1 |
| Электропневматическая противоблокировочная тормозная система транспортного средства | 1990 |
|
SU1710402A1 |
| АНТИБЛОКИРОВОЧНОЕ УСТРОЙСТВО "РОДИНА" ДЛЯ ТОРМОЗНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА | 2004 |
|
RU2254247C1 |
| Противоблокировочная тормозная система автомобиля | 1990 |
|
SU1781107A1 |
| Противоблокировочное устройство тормозной системы транспортного средства | 1979 |
|
SU1662884A1 |
| ПРОТИВОБЛОКИРОВОЧНОЕ ТОРМОЗНОЕ УСТРОЙСТВО ТРАНСПОРТНОГО СРЕДСТВА | 1990 |
|
RU1773007C |
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 2006 |
|
RU2316822C1 |
| Электропневматический тормозной привод транспортного средства | 1988 |
|
SU1594029A1 |
| Устройство для контролирования состояния колеса транспортного средства | 1979 |
|
SU965346A3 |
Использование: в транспортном машиностроении, конкретнее в тормозных системах, предотвращающих блокирование колес при торможении. Сущность изобретения: устройство содержит датчики (Д) динамического состояния колес, выходы которых через формирователи (Ф) сигнала скорости связаны с микропроцессорными (МП) вычислителями для каждой пары колес, согласующие усилители (СУ), входы которых подключены к выходам МП вычислителей, а выходы - к соленоидам регулирующих клапанов, установленных в тормозных контурах колес. Устройство снабжено дополнительным блоком контроля (БК) эффективности торможения, электрическим выключателем и цифровым индикатором (ЦИ), при этом входы указанного БК подключены к Д начала торможения и входам МП вычислителей, связанным с Ф, выход - к ЦИ, БК выполнен в виде связанных магистралями входного мультиплексора (МС), счетчиков (С) числа оборотов ведомых колес и времени торможения, тактового генератора, узла определения начала торможения, элемента И и арифметико-логического устройства (АЛУ), причем входы АЛУ подключены к одному из контактов выключателя и выходам С времени торможения, а выход - к ЦИ. Определение эффективности торможения осуществляется устройством за время замедления транспортного средства с 40 до 20 км/ч и определяется по формуле: Z=0,556/(t20-t40) , где Z - коэффициент торможения автомобиля; (t20-t40) - время замедления автомобиля с 40 до 20 км/ч; 0,556 - константа определения по формуле: const = (40 - 20) 1000/360 g, где g=9,8 м/с2. Дополнительный БК может быть выполнен в виде специализированной БИС или интегрального узла. 3 з. п. ф-лы, 2 ил.
Z=  ,
,
где Z - коэффициент торможения автомобиля;
(t20 - t40) - время замедления автомобиля с 40 до 20 км/ч;
0,556 - константа, определенная по формуле
const =  ,
,
где g = 9,8 м/с2.
