Изобретение относится к транспортной технике и может быть использовано в автоматических устройствах управления транспортным средством для предотвращения столкновений автомобилей за счет управления изменением направления движения управляемых колес автомобиля при внезапно возникающих препятствиях. Устройство применимо для транспортных средств с пневматическими или гидравлическими системами привода тормозов, противоблокировочными системами, а также оборудованными гидравлическим усилителем рулевого привода.
Известно устройство для автоматического торможения транспортного средства перед препятствием, содержащее блок измерения абсолютной скорости транспортного средства, связанный с дифференциатором и с блоком вычисления безопасной дистанции между транспортным средством и лидером, выход которого подключен к блоку сравнения, связанному с исполнительными органами тормозной системы и системы управления двигателем, и локатор, один из выходов которого подключен к упомянутому блоку сравнения, а другой к упомянутому блоку вычисления безопасной дистанции; блок определения установившегося замедления транспортного средства, связанный с выходом дифференциатора, и детектором предельного замедления, выходы которого подключены к входам указанных блоков определения установившегося замедления лидера, блок определения запаздывания тормозов, запоминающее устройство, информационные входы которого подключены к выходам указанных блоков определения установившегося замедления лидера, блоком определения запаздывания тормозов, а разрешающий вход - к выходу детектора предельного замедления, и блоком определения поправки к величине безопасной дистанции, выход которого подключен к блоку сравнения, а входы связаны с указанными запоминающим устройством и блоком измерения абсолютной скорости, при этом устройство имеет датчик давления в приводе тормозов и датчик начала торможения, выходы которых совместно с выходом дифференциатора подключены к детектору предельного замедления, и блок определения запаздывания тормозов.
Недостаток известного устройства заключается в том, что при внезапно возникшем препятствии расстояние от автомобиля до препятствия может оказаться меньше минимально возможного тормозного пути и устройство не сможет предотвратить столкновение.
Технический результат направлен на изменение направления движения транспортного средства при невозможности избежать столкновения торможением ввиду возникновения внезапно появляющихся препятствий.
Технический результат достигается тем, что в устройство для автоматического предотвращения столкновения транспортного средства, содержащее блок измерения абсолютной скорости транспортного средства, связанный с дифференциатором и с блоком вычисления безопасной дистанции между транспортным средством и лидером, выход которого подключен к блоку сравнения, связанному с исполнительными органами тормозной системы и системы управления двигателем, локатор, один из выходов которого подключен к упомянутому блоку сравнения, а другой к упомянутому блоку вычисления безопасной дистанции, блок определения установившегося замедления транспортного средства, связанный с выходом дифференциатора, и детектором предельного замедления, выходы которых подключены ко входам блока определения установившегося замедления лидера, блок определения запаздывания тормозов; запоминающее устройство, информационные входы которого подключены к выходам указанных блоков определения установившегося замедления лидера, установившегося замедления транспортного средства и запаздывания тормозов, а разрешающий вход - к выходу детектора предельного замедления, блок определения поправки к величине безопасной дистанции, выход которого подключен к блоку сравнения, а входы связаны с указанными запоминающим устройством, и блок измерения абсолютной скорости, датчики давления в приводе тормозов и начала торможения, выходы которых совместно с выходом дифференциатора подключены к детектору предельного замедления и блоку определения запаздывания тормозов, при этом устройство дополнительно снабжено системой подруливания управляемых колес (СПУК), включающей исполнительный орган рулевого управления с электромагнитным клапаном управления, связанный с блоком определения угла поворота управляемых колес и насосом гидроусилителя руля, силовым цилиндром гидроусилителя руля, который в свою очередь связан с управляемыми колесами, и блоком отключения электромагнитного клапана управления с датчиком отключения.
Отличительными признаками от прототипа является то, что устройство дополнительно снабжено системой подруливания управляемых колес (СПУК), включающей исполнительный орган рулевого управления с электромагнитным клапаном управления, связанный с блоком определения угла поворота управляемых колес и насосом гидроусилителя руля, силовым цилиндром гидроусилителя руля, который в свою очередь связан с управляемыми колесами, и блоком отключения электромагнитного клапана управления с датчиком отключения, а также связями ранее используемыми и вновь введенными узлами.
На чертеже представлена блок-схема автоматического устройства для предотвращения столкновений транспортных средств.
Предлагаемое устройство представляет совокупность локатора 1 для определения расстояния L до препятствия (лидера) и относительной скорости V0TH транспортного средства и блока 2 измерения абсолютной скорости Vабс транспортного средства, подключенных к блоку 3 вычисления безопасной дистанции D между транспортным средством и лидером, выход блока 2 измерения абсолютной скорости подсоединен к входу дифференциатора 4, выход которого подключен к входу блока 5 определения установившегося замедления транспортного средства и параллельно с выходами датчиков 6 и 7 давления в приводе тормозов и начала торможения, к входам детектора 8 предельного замедления и блока 9 определения запаздывания тормозов, причем выходы блока 5 определения установившегося замедления и детектора 8 подсоединены к входам блока 10 определения установившегося замедления лидера, выход которого совместно с выходами блоков 5 и 9 определения установившегося замедления транспортного средства и запаздывания тормозов подключены к информационным входам запоминающего устройства 11, к разрешающему входу которого подключен выход детектора 8, а выходы запоминающего устройства 11 совместно с выходом блока 2 измерения абсолютной скорости подключены к входам блока 12 определения поправки d к величине безопасной дистанции 0, выход которого совместно с выходом локатора 1 и блока 3 вычисления безопасной дистанции подсоединены к входам блока 13 сравнения, выход которого подключен к блоку 14 индикации, к исполнительным органам системы управления двигателем 15 и тормозной системой 16, блока определения угла поворота управляемых колес 18, который подает сигнал на электромагнитный клапан управления исполнительного органа рулевого управления 17, к выходу которого подается сигнал с блока отключения электромагнитного клапана 19, ко входу которого подключен датчик отключения СПУК 20, который отключает систему после вступления в работу водителя.
Узлы устройства работают согласно алгоритма известного устройства для автоматического торможения транспортного средства перед препятствием до момента появления внезапно возникшего препятствия. В случае, если расстояние до препятствия меньше минимально возможного тормозного пути, блок 13 сравнения выдает команду на блок 18 определения угла поворота управляемых колес и на электромагнитный клапан управления исполнительного органа рулевого управления 17. За счет перемещения электромагнитного клапана управления 17 осуществляется подача рабочей жидкости из дополнительного выхода насоса гидроусилителя руля 21 в полости (левую или правую) силового цилиндра гидроусилителя руля 22 в зависимости от формируемого сигнала в блоке управления 23, что и обеспечивает подруливание управляемых колес влево (вправо). При вступлении в работу водителя (перемещении рулевого управляемого органа влево (вправо)) срабатывает герконовый датчик отключения СПУК 20, который подает сигнал в блок отключения электромагнитного клапана 19. Блок отключения электромагнитного клапана 19 подает сигнал на электромагнитный клапан управления исполнительного органа рулевого управления 17, который, перемещаясь в исходное положение, разобщает систему «дополнительный выход насоса гидроусилителя руля 21 - полости (левую или правую) силового цилиндра гидроусилителя 22».
Предлагаемое устройство приводит к уменьшению травматизма и экономического урона от дорожно-транспортных происшествий, вызванных внезапно возникающими препятствиями, что является непосредственной причиной значительного количества столкновений транспортных средств, наездов на препятствия, и на пешеходов.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЧЕСКОЕ УСТРОЙСТВО ДЛЯ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2305641C1 |
| Устройство для автоматического торможения транспортного средства перед препятствием | 1978 |
|
SU779118A1 |
| Устройство для автоматического торможения автомобиля | 1988 |
|
SU1643245A1 |
| Гидравлическая система транспортного средства | 1989 |
|
SU1676878A1 |
| СПОСОБ УПРАВЛЕНИЯ ГИДРАВЛИЧЕСКИМ ТОРМОЗНЫМ ПРИВОДОМ ДЛЯ ОБЕСПЕЧЕНИЯ АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ АВТОМОБИЛЯ | 2012 |
|
RU2518112C1 |
| МАШИНА И СПОСОБ ЕЕ ПРИМЕНЕНИЯ | 2011 |
|
RU2474502C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМОБИЛЕМ | 2012 |
|
RU2517396C1 |
| Устройство для поддержания безопасной дистанции между автомобилями в потоке | 1989 |
|
SU1699827A1 |
| Противоблокировочное устройство тормозной системы транспортного средства | 1979 |
|
SU1662884A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО ТОРМОЖЕНИЯ КОЛЕСНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2737069C1 |
Изобретение относится к транспортной технике и может быть использовано в автоматических устройствах управления транспортным средством. Устройство содержит блок измерения абсолютной скорости транспортного средства, дифференциатор, блок вычисления безопасной дистанции между транспортным средством и лидером, блок сравнения, исполнительные органы тормозной системы и системы управления двигателем, локатор, блок определения установившегося замедления транспортного средства, детектор предельного замедления, блок определения запаздывания тормозов, запоминающее устройство, блок определения поправки к величине безопасной дистанции, блок измерения абсолютной скорости, датчики давления в приводе тормозов и начала торможения. Блок сравнения выдает команду на блок определения угла поворота управляемых колес, который подает сигнал на электромагнитный клапан управления исполнительного органа рулевого управления, к выходу которого подается сигнал с блока отключения электромагнитного клапана, ко входу которого подключен датчик отключения системы подруливания управляемых колес, который отключает систему после вступления в работу водителя. За счет перемещения электромагнитного клапана управления исполнительного органа рулевого управления осуществляется подача рабочей жидкости из дополнительного выхода насоса гидроусилителя руля в полости левую или правую силового цилиндра гидроусилителя руля в зависимости от формируемого сигнала в блоке управления. Технический результат направлен на расширение функциональных возможностей систем управления и повышение безопасности дорожного движения. 1 ил.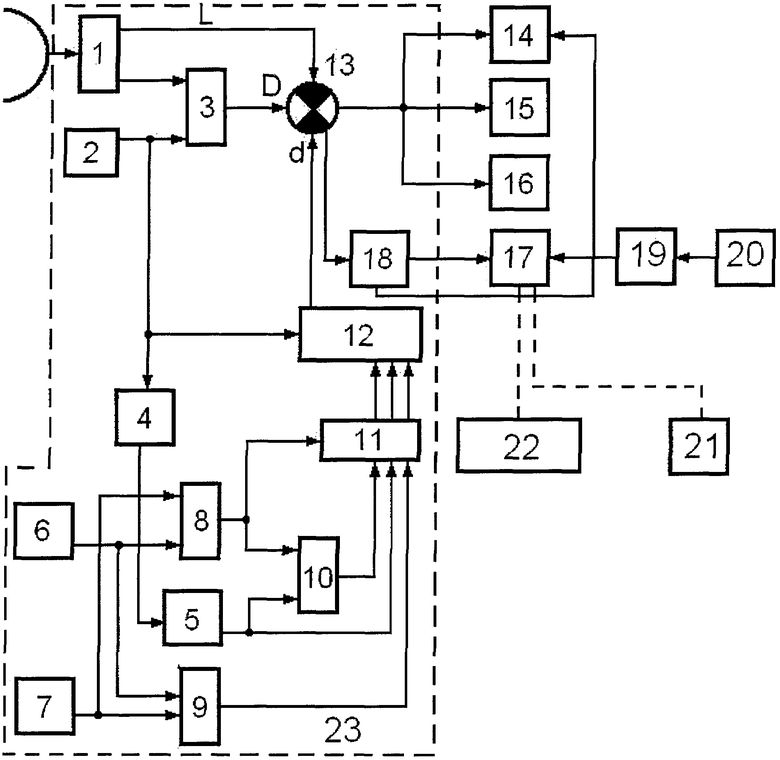
Устройство для автоматического предотвращения столкновений транспортного средства, содержащее блок измерения абсолютной скорости транспортного средства, связанный с дифференциатором и с блоком вычисления безопасной дистанции между транспортным средством и лидером, выход которого подключен к блоку сравнения, связанному с исполнительными органами тормозной системы и системы управления двигателем, локатор, один из выходов которого подключен к упомянутому блоку сравнения, а другой к упомянутому блоку вычисления безопасной дистанции, блок определения установившегося замедления транспортного средства, связанный с выходом дифференциатора и детектором предельного замедления, выходы которого подключены ко входам блока определения установившегося замедления лидера, блок определения запаздывания тормозов, запоминающее устройство, информационные входы которого подключены к выходам указанных блоков определения установившегося замедления лидера, установившегося замедления транспортного средства и запаздывания тормозов, а разрешающий вход - к выходу детектора предельного замедления, блок определения поправки к величине безопасной дистанции, выход которого подключен к блоку сравнения, а входы связаны с указанными запоминающим устройством и блоком измерения абсолютной скорости, датчики давления в приводе тормозов и начала торможения, выходы которых совместно с выходом дифференциатора подключены к детектору предельного замедления и блоку определения запаздывания тормозов, отличающееся тем, что блок сравнения выдает команду на блок определения угла поворота управляемых колес, который подает сигнал на электромагнитный клапан управления исполнительного органа рулевого управления, к выходу которого подается сигнал с блока отключения электромагнитного клапана, ко входу которого подключен датчик отключения системы подруливания управляемых колес, который отключает систему после вступления в работу водителя, причем за счет перемещения электромагнитного клапана управления исполнительного органа рулевого управления осуществляется подача рабочей жидкости из дополнительного выхода насоса гидроусилителя руля в полости левую или правую силового цилиндра гидроусилителя руля в зависимости от формируемого сигнала в блоке управления.
| Устройство для автоматического торможения транспортного средства перед препятствием | 1978 |
|
SU779118A1 |
| JP 2000344123 А, 26.04.2000 | |||
| JP 2001301640 А, 31.10.2001 | |||
| JP 10138894 А, 26.05.1998. | |||

