Изобретение относится к радиотехнике и вычислительной технике и может найти применение при управлении объектами широкого профиля.
Целью изобретения является повы- i шение быстродействия, точности и уменьшение энергоемкости системы.
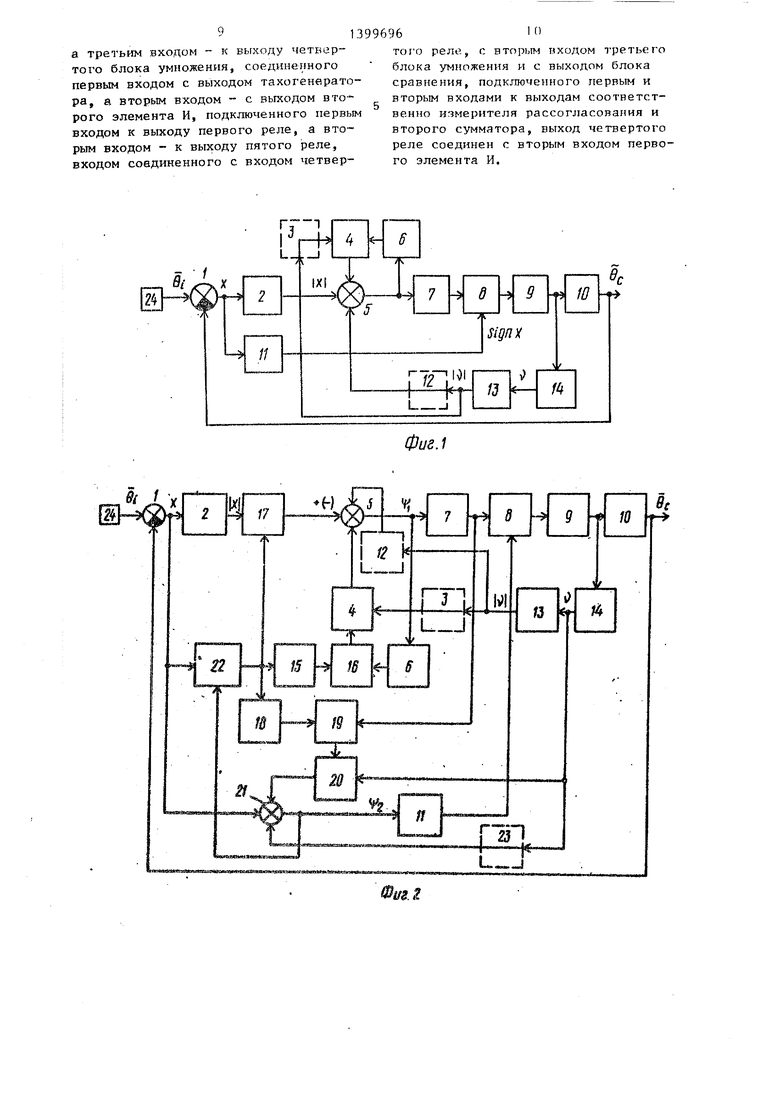
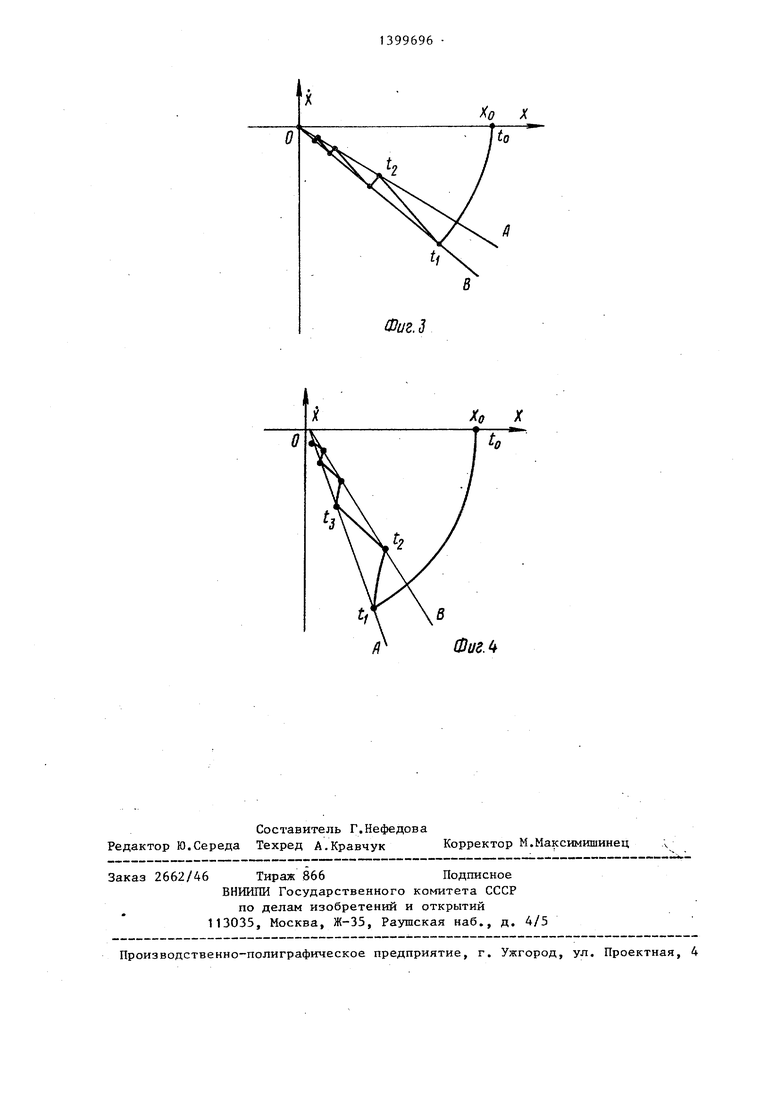
На фиг. 1-2 приведены функциональные схемы предлагаемой системыJ на Q фиг. 3-4 - фазовые графики системы.
Система содержит измеритель 1 рассогласования, первый детектор 2, пер- вый масштабный блок 3, второй блок 4 умножения, первый сумматор 5, третье 5 и первое реле 6 и 7, первый блок 8 I умножения, двигатель 9, редуктор 10, второе реле 11, второй масштабный блок 12, -второй детектор 13, тахоге- нератор 14, четвертое реле 15, первый 20 элемент И 16, третий блок 17 умноже- ния, пятое реле 18, второй элемент И 19, четвертый блок 20 умножения, второй сумматор 21, блок 22 сравнения, третий масштабньй блок 23, задатчик .25 24. Кроме того, на чертежах приняты следуюпще обозначения: 9 выходной сигнал задатчика 24 или входной сиг-; нал системы, 0 - выходной сигнал системы; X - выходной сигнал измерителя зо 1 рассогласования или сигнал рассо- гласов.ания, 1х| - модуль сигнала рассогласования; -5 - выходной сигнал тахогенератора модуль выход- ного сигнала тахогенератораj signx - выходной сигнал второго реле 11, х производная сигнала рассогласования у, ,ф2 - выходные сигналы первого и второго сумматоров 5 и 21 ОА и ОВ - линии переключения; t - i-й момент . времени работы системы.
Рассмотрим вначале работу системы, описанной в п. 1 формулы изобретения (фиг. 1).
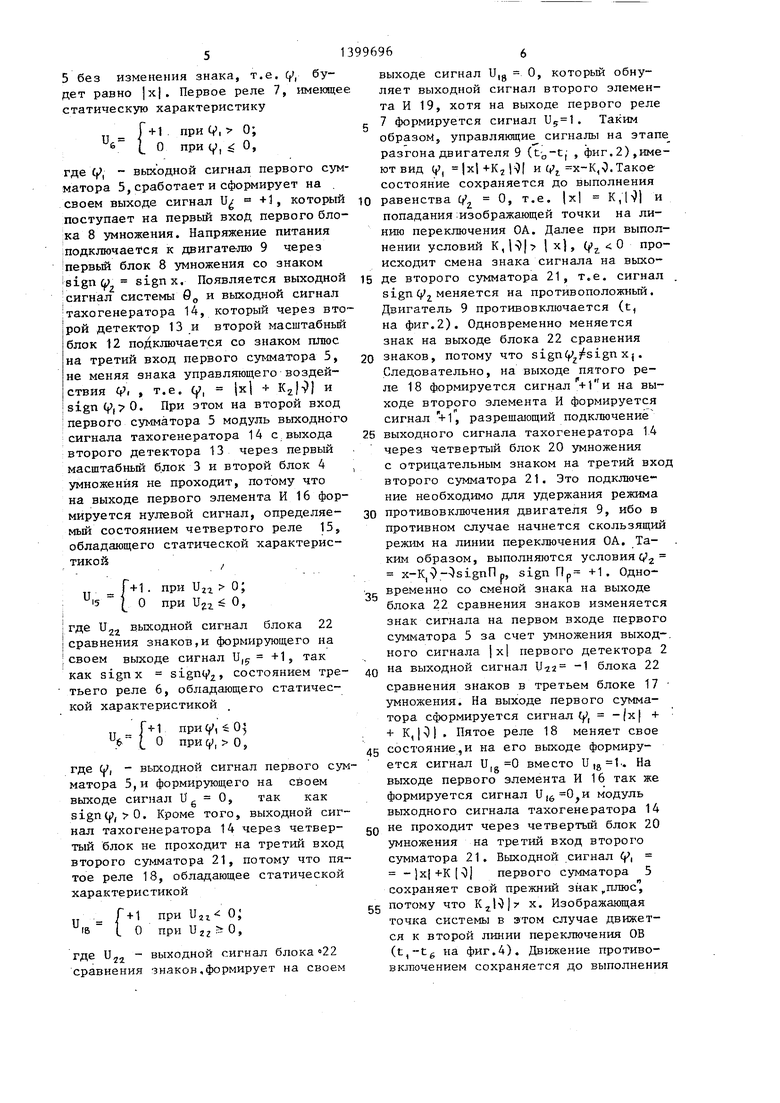
Увеличение быстродействия к точности системы осуществляется путем чередования следующих движений: включение - квазискользящий режим дина- )мическ6е торможение - вшючение за счет формирования двух линий переключения ОА и ОВ (фиг.З). Для этого 50 в системе, линейная часть которой представляет собой последовательно соединенные инерционное звено и интегратор, реализован следующий алгоритм управления: . , 55
fsignx н (S,x 0)A; о н ()ЛВ, где 8,х-ьК,х, 8г х+КгХ, X - сигнал
35
45
i
Q
5 20 .25 зо
,
50 55
35
45
paccoглacoвaния х - производная от сигнала рассогласования; х - при ступенчатом входном воздействии К, , К - угловые коэффициенты линий переключения ОА и ОВ, причем | К, « | 1.
Система работает следующим образом.
При подаче с выхода задатчика 24 сигнала задания 0; (момент t на фиг. 3) двигатель 9 начинает вращаться в требуемом направлении, так как знак направления вращения его вала в реверсивном канале определяется выходным сигналом signx второго реле 11, а в нереверсивном канале обеспечивается прохождение модуля сигнала рассогласования (х| через первый сумматор 5 со знаком плюс (так как выходной сигнал тахогенератора 14 равен нулю) на вход первого реле 7, имеющего характеристику
,. Г 1, при Uc 0; „ 7 о, , « - -выход- ной сигнал первого сумматора 5. Реле 7 формирует на своем выходе сигнал и 1 и через первьй блок 8 умножения подключает напряжение питания к двигателю 9 со знаком, равным ,signx. Двигатель 9 начинает вращаться, отрабатывая сигнал задания . 0;. Появляются выходной сигнал системы в„ и выходной сигнал тахогенератора 14, который через второй детектор 13 и второй масштабный блок 12 подается на третий вход первого сумматора 5 с обратным знаком, причем на второй вход первого сумматора 5 модуль выходного сигнала тахогенератора 14 через первый масштабный блок 3 и второй блок 4 умножения не проходит, так как характеристика третьего реле 6 имеет вид
Го, при , 6 , при и, : О,
где и5 - выходной сигнал первого сумматора 5, на его выходе формируется сигнал Ug О и во втором блоке 4 умножения происходит умножение на ноль.
Перевод двигателя 9 в режим дина мического торможения происходит в момент времени t, (фиг. 3), когда сигнал на выходе второго масштабного блока 12 сравняется по модулю с сигналом рассогласования х. Другими сло вами коэффициент передачи второго масштабного блока 12 определяет угловой коэффициент К линии переключения ОБ из выражения . Для того, чтобы в системе не начался скользящий режим около линии переключения ОВ (так как К j ; 1 и модуль сигнала рассогласования xj после перевода двигателя 9 в режим динамического торможения опять превысит модуль ), для удержания двигателя 9 в режиме динамического торможения в момент перехода сигнала на выходе сумматора 5 через ноль в сторону отрицательных величин включается третье реле 6, разрешающее подключение через второй блок А умножения дополнительного сигнала с выхода тахогенератора 14 с коэффициентом К, определяемым первым масштабным блоком 3, также с обратным знаком.
Режим динамического торможения системы продолжается до попадания изображающей точки системы на линию переключения ОА (момент t на фиг.2) угловой коэффициент которой определяется величинами коэффициентов К и Kj. После попадания изображающей точки на линию переключения ОА S, x-K-}-Kj-)x-K,, т.е. после равенства нулю и перехода в сторону положительных величин сигнала на выходе сумматора 5 происходит отключение третьего реле 6 и, следовательно, отключение дополнительного сигнала с выхода тахогенератора 14. На выходе сумматора 5 действует сигнал
3996964
с знаком плюс,и двигатель 9 переходит в режим включения, так как система возвращается в исходное состоя- 1- ние, продолжая описанные движения до попадания изображающей точки системы fe начало координат.
Задачи синтеза закона управления сводятся к выбору коэффициентов пе10 редачи первого и второго масщтабных блоков 3 и 12 или к выбору коэффициента усиления по первому, второму и третьему входам сумматора 5, исходя из условий организации требуемого
15 наклона линий переключения, который, в свою очередь, может определяться на основе интегрального критерия, включающего быстродействие и точность.
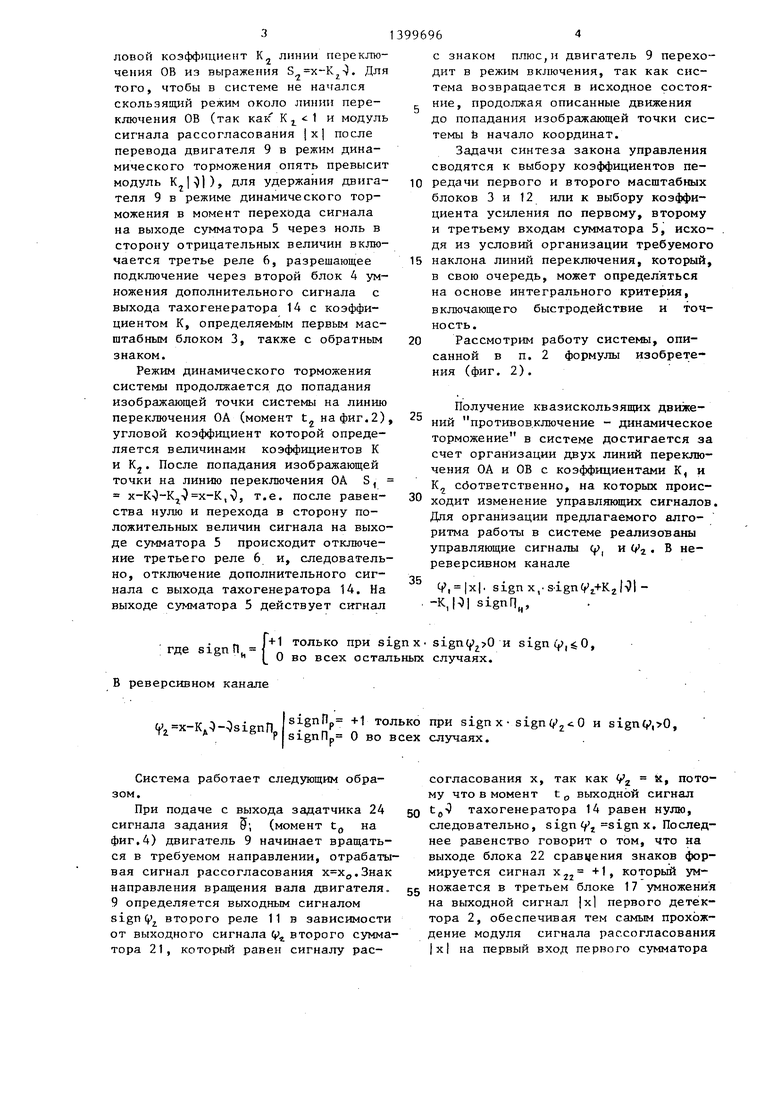
20 Рассмотрим работу системы, описанной в п. 2 формулы изобретения (фиг. 2).
Получение квазискользящих движений противов.ключение - динамическое торможение в системе достигается за счет организации двух линий переключения ОА и ОВ с коэффициентами К, и К соответственно, на которых происходит изменение управляющих сигналов. Для организации предлагаемого алгоритма работы в системе реализованы управляющие сигналы ф и (2 В нереверсивном канале
30
V, |x|. sigпx,.s.ignVг.+K2Ыt- , -K,R signO,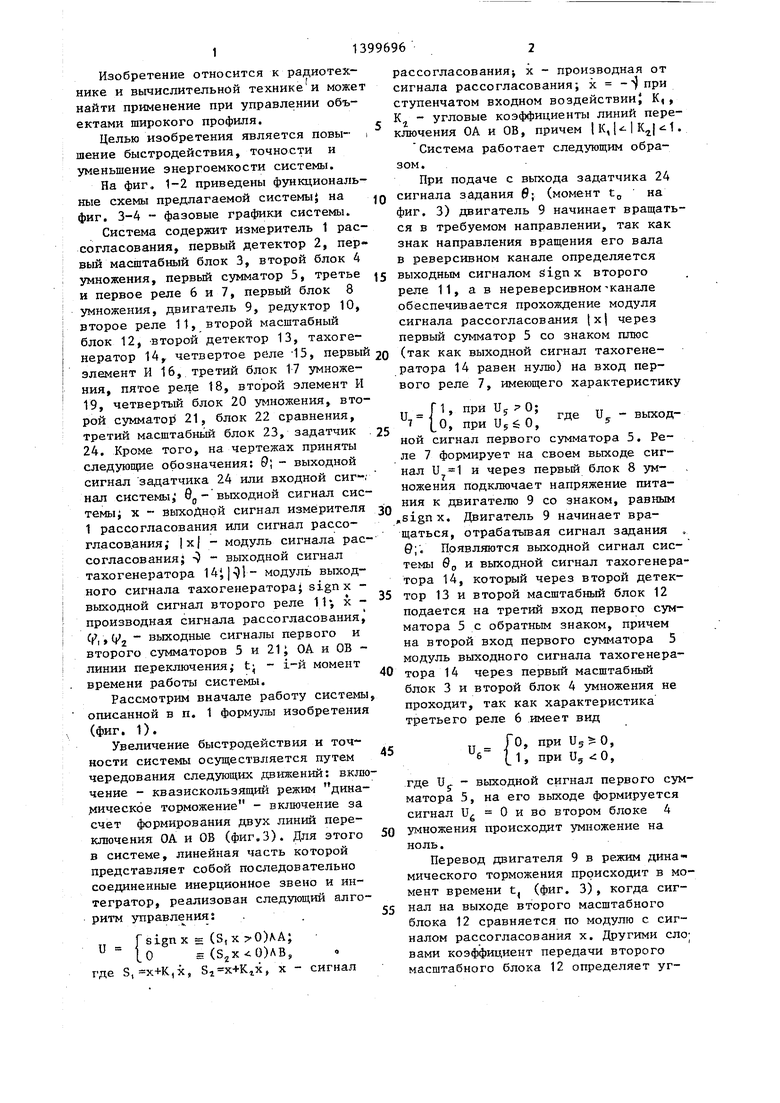
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейная следящая система с нелинейной коррекцией | 1984 |
|
SU1223205A1 |
| Бесконтактный следящий привод постоян-НОгО TOKA | 1979 |
|
SU853606A1 |
| Следящая система | 1981 |
|
SU968783A2 |
| Бесконтактная следящая система постоянного тока | 1979 |
|
SU930238A2 |
| Релейная следящая система с нелинейной коррекцией | 1985 |
|
SU1312523A1 |
| Бесконтактный следящий привод постоянного тока | 1975 |
|
SU930241A1 |
| Следящая система | 1979 |
|
SU788076A1 |
| Бесконтактная следящая система постоянного тока | 1974 |
|
SU474787A1 |
| Следящая система | 1986 |
|
SU1352451A1 |
| Следящая система | 1987 |
|
SU1425595A1 |
Изобретение относится к радиотехнике и вычислительной технике и может найти применение при управлении широким классом объектов. Целью изобретения по п. 1 формулы изобретения является повьппение быстродействия и точности системы. Поставленная цель достигается за счет того, что в системе сравнивают заданное и фактическое значение регулируемого параметра. Определяют модуль и знак сигнала рассогласования. Модуль сигнала рассогласования алгебраически суммируют с двумя сигналами, которые формируются путем умножения модуля скорости вращения вала исполнительного двигателя на разные масштабные коэффициенты, причем сумми- ровзкие. второго сигнала производится только в тех случаях, когда суммарный сигнал меньше нуля. Как только суммарный сигнал становится больше нуля, он умножается на знак сигнала рассогласования и поступает на вход двигателя, вызывая изменение фактического значения регулируемого параметра. Целью изобретения по п. 2 формулы изобретения является уменьшение энергоемкости системы и дополнительное повьш1ение ее быстродействия. Эта цель достигается за счет того, что в системе осуществляют дополнительное алгебраическое суммирование сигнала рассогласования с двумя сигналами, которые формируются путем умножения скорости вращения вала на разные мае штабные коэффициенты. Сравниваются знаки сигнала рассогласования и результирующего сигнала дополнительного суммирования. В зависимости от результатов сравнения меняется знак модуля сигнала рассогласования при основном суммировании. Кроме того, подключение второго сигнала при основном и при дополнительном суммированиях осуществляют в зависимости от результатов основного суммирования и от результатов сравнения знаков сигнала рассогласования и сигнала, полученного при дополнительном суммировании, а положительный суммарный сигнал, полученный при основном суммировании, умножают на знак сигнала, полученного при дополнительном суммировании, и результирующий сигнал подают на двигатель. 1 з.п. ф-лы, 4 ил. S (Л со со со О) со О)
где sign П,
f
LO
только при signx signy O и , во всех остальных случаях.
В реверсивном канале
(f x-Kд:)- sigпПp
81§пПр +1 только при sign х- sign( и sign(f ,0, signnp О во всех случаях.
Система работает следующим образом.
При подаче с выхода задатчика 24 сигнала задания 5; (момент t на фиг.4) двигатель 9 начинает вращаться в требуемом направлении, отрабатывая сигнал рассогласования (,.Знак направления вращения вала двигателя. 9 определяется выходным сигналом sign 9 второго реле 11 в зависимости от выходного сигнала V второго сумматора 21, который равен сигналу рассогласования X, так как Vj потому что в момент t выходной сигнал
tg- тахогенератора 14 равен нулю, следовательно, sign y.j sign х. Последнее равенство говорит о том, что на выходе блока 22 сравнения знаков формируется сигнал 2г который умножается в третьем блоке 17 умножения на выходной сигнал |х1 первого детектора 2, обеспечивая тем самым прохождение модуля сигнала рассогласования |х| на первый вход первого сумматора
5 без изменения знака, т.е. Cf , будет равно jxl. Первое реле 7, имеющее статическую характеристику
- {
при i, 0; при (, О,
где ( выходной сигнал первого сумматора 5,сработает и сформирует на
своем выходе сигнал U который поступает на первый вход первого блока 8 умножения. Напряжение питания :подключаеТся к двигателю 9 через первый блок 8 умножения со знаком 8ignw signx. Появляется выходной сигнал системы б,, и выходной сигнал Iтахогенератора 14, который через вто 1рой детектор 13 и второй масштабный |блок 12 подключается со знаком плюс на третий вход первого сумматора 5, не меняя знака управляющего воздействия V, , т.е. (j7, 1x1 -i- ) и jsignCt pO. При этом на второй вход I первого сумматора 5 модуль выходного сигнала тахогенератора 14 с выхода второго детектора 13 через первый масштабный блок 3 и второй блок 4 умножения не проходит, потому что на выходе первого элемента И 16 формируется нулевой сигнал, определяемый состоянием четвертого реле 15, обладающего статической характеристикой
и
15
Г+1. при о;
| о при е О,
I где U22 ЕЬКОДНОЙ сигнал блока 22 I сравнения знаков,и формирующего на своем выходе сигнал и, +1 так как signx sign() 2, состоянием тре- тьего реле 6, обладающего статической характеристикой
+ 1
О
при у, 4 0 при V, О 5
где Cf, - выходной сигнал первого сумматора 5, и формирующего на своем выходе сигнал Ug О, так как sign(jJ, 0. Кроме того, выходной сигнал тахогенератора 14 через четвертый блок не проходит на третий вход второго сумматора 21, потому что пятое реле 18, обладающее статической характеристикой
f
+ 1
О
при Uji-i о;
при 1)22 : О,
ВЫХОДНОЙ сигнал блока 22 сравнения знаков,формирует на своем
где и
22
е
1399696
выходе сигнал U
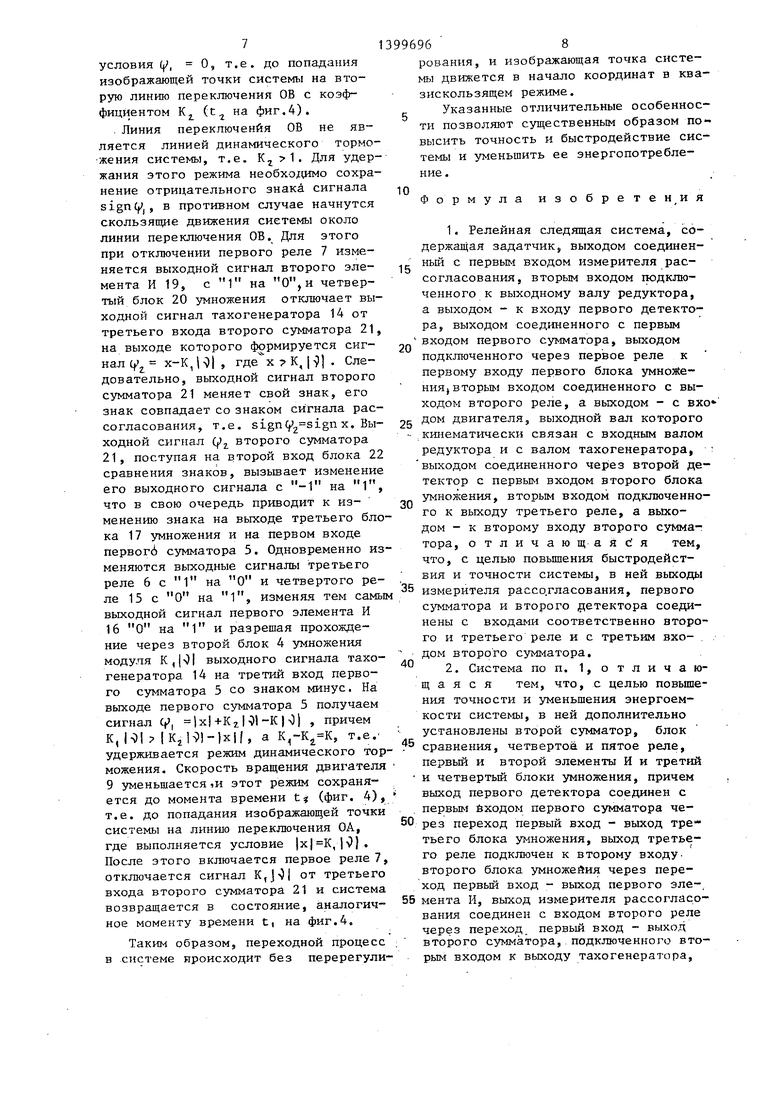
,д О, который обнуляет выходной сигнал второго элемента И 19, хотя на выходе первого реле с 7 формируется сигнал 1). Таким образом, управляющие сигналы на этапе разгона двигателя 9 (t-o-tj , фиг. 2),имеют вид У| |х1-(-K-z |( и v. ,.Такое состояние сохраняется до выполнения
5
0
5
0
равенства Q О, т.е. |х1 К,-) и попадания:изображающей точки на линию переключения ОА. Далее при выполнении условий К,, Q) происходит смена знака сигнала на выходе второго сумматора 21, т.е. сигнал sign 2. ияется на противоположный. Двигатель 9 противовключается (t на фиг.2). Одновременно меняется знак на выходе блока 22 сравнения знаков, потому что sign( Xj. Следовательно, на выходе пятого реле 18 формируется сигнал на выходе второго элемента И формируется сигнал +1, разрешающий подключение выходного сигнала тахогенератора 14 через четвертый блок 20 умножения с отрицательным знаком на третий вход второго сумматора 21. Это подключе ние необходимо для удержания режима противовключения двигателя 9, ибо в противном случае начнется скользящий режим на линии переключения ОА. Таким образом, выполняются условия с x-K,)- signn р, sign Пр +1. Одновременно со сменой знака на выходе блока 22 сравнения знаков изменяется знак сигнала на первом входе первого сумматора 5 за счет умножения выход-, ного сигнала |х1 первого детектора 2 на выходной сигнал )-it- 1 блока 22 сравнения знаков в третьем блоке 17 умножения. На выходе первого сумматора сформируется сигнал (fJ, - (х | + + К, . Пятое реле 18 меняет свое
5 состояние,и на его выходе формируется сигнал вместо U,.. На выходе первого элемента И 16 так же формируется сигнал и, модуль выходного сигнала тахогенератора 14
Q не проходит через четвертый блок 20 умножения на третий вход второго сумматора 21. Выходной сигнал (j, первого сумматора 5 сохраняет свой прежний знак ,Ш1юс
g потому что Kj,R)7 X. Изображающая точка системы в этом случае движется к второй линии переключения ОВ (t,-tg на фиг.4). Дв11жение противо- включением сохраняется до выполнения
5
0
7
условия (, 0, т.е. до попадания изображающей точки системы на вторую линию переключения ОВ с коэффициентом Kj (t на фиг.4).
. Линия переключения ОВ не является линией динамического тормо- жения системы, т.е. К 1. Для удержания этого режима необходимо сохранение отрицательного знака сигнала sign(f;j, в противном случае начнутся скользящие движения системы около линии переключения ОВ. Для этого при отключении первого реле 7 изменяется выходной сигнал второго элемента И 19, с 1 на О, и четвертый блок 20 умножения отключает выходной сигнал тахогенератора 14 от третьего входа второго сумматора 21, на выходе которого формируется сигнал (у х-К, Ы| , , 19. Следовательно, выходной сигнал второго сумматора 21 меняет свой знак, его знак совпадает со знаком сигнала рассогласования, т.е. sign х. Вы- 25 «° выходной вал которого
ходной сигнал Q)j второго сумматора 21, поступая на второй вход блока 22 сравнения знаков, вызьшает изменение его выходного сигнала с -1 на 1, что в свою очередь приводит к изменению знака на выходе третьего блока 17 умножения и на первом входе первогб сумматора 5. Одновременно изменяются выходные сигналы третьего реле 6 с 1 на О и четвертого ре30
кинематически связан с входным валом редуктора и с валом тахогенератора, выходом соединенного через второй детектор с первым входом второго блока умножения, вторым входом подключенного к выходу третьего реле, а выходом - к второму входу второго сз мматора, отличающаяся
тем.
что, с целью повьшения быстродействия и точности системы, в ней выходы
ле 15 с О на 1, изменяя тем самым измерителя рассо.гласования, первого выходной сигнал первого элемента И 16 О на 1 и разрешая прохождение через второй блок 4 умножения модуля К,()| выходного сигнала тахо- . генератора 14 на третий вход первого сумматора 5 со знаком минус. На выходе первого сумматора 5 получаем сигнал (f lx|+K2l l-К )) , причем К, |К,19)-)х(, а , т.е. удерживается режим динамического тор- - сравнения, четвертой и пятое реле,
первый и второй элементы И и третий и четвертый блоки умножения, причем
сумматора и второго детектора соединены с входами соответственно второго и третьего реле и с третьим входом второго сумматора,
можения. Скорость вращения двигателя 9 уменьшается,и этот режим сохраняется до момента времени (фиг. 4), т.е. до попадания изображающей точки системы на линию переключения ОА, где выполняется условие ,l i)j. После этого включается первое реле 7, отключается сигнал K,j 3| от третьего входа второго сумматора 21 и система возвращается в состояние, аналогичное моменту времени t| на фиг.4.
Таким образом, переходной процесс ; в системе происходит без перерегули50
выход первого детектора соединен с первым бходом первого сумматора через переход первый вход - выход тре- тьего блока умножения, выход третьего реле подключен к второму входу- второго блока умножейия через переход первый вход - выход первого эле-, 55 мента И, выход измерителя рассогласования соединен с входом второго реле через переход, первый вход - выход второго сумматора, подключенного вторым входом к выходу тахогенератора.
1399696 8
рования, и изображающая точка системы движется в начало координат в квазискользящем режиме.
J. Указанные отличительные особенности позволяют существенным образом повысить точность и быстродействие системы и уменьшить ее энергопотребление.
Формула изобретен ия
25 «° выходной вал которого
30
кинематически связан с входным валом редуктора и с валом тахогенератора, выходом соединенного через второй детектор с первым входом второго блока умножения, вторым входом подключенного к выходу третьего реле, а выходом - к второму входу второго сз мматора, отличающаяся
тем.
что, с целью повьшения быстродействия и точности системы, в ней выходы
измерителя рассо.гласования, первого сравнения, четвертой и пятое реле,
измерителя рассо.гласования, первого сравнения, четвертой и пятое реле,
сумматора и второго детектора соединены с входами соответственно второго и третьего реле и с третьим входом второго сумматора,
50
выход первого детектора соединен с первым бходом первого сумматора через переход первый вход - выход тре- тьего блока умножения, выход третьего реле подключен к второму входу- второго блока умножейия через переход первый вход - выход первого эле-, 55 мента И, выход измерителя рассогласования соединен с входом второго реле через переход, первый вход - выход второго сумматора, подключенного вторым входом к выходу тахогенератора.
a третьим входом - к вьгходу четвертого блока умножения, соединенного первым входом с выходом тахогенерато- ра, а вторым входом с выходом вто рого элемента И, подключенного первым входом к выходу первого реле, а вторым входом - к выходу пятого реле, входом соединенного с входом четверToi O реле, с вторым входом третьего блока умножения и с выходом блока сравнения, подключенного первым и вторым входами к выходам соответственно измерителя рассогласования и второго сумматора, выход четвертого реле соединен с вторым входом первого элемента И.
Фие.1
8с
0 Л
Фиг.
Хо X
| Бесконтактная следящая система постоянного тока | 1972 |
|
SU483650A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Релейная следящая система с нелинейной коррекцией | 1984 |
|
SU1223205A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Следящая система постоянного тока | 1974 |
|
SU565280A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
