Изобретение относится к области систем автоматического управления, в частности к приводам наведения с механической передачей, содержащей тормоз для удержания объекта управления в заданном положении без потребления энергии исполнительным двигателем, и может быть использовано в системах управления наведением исполнительных устройств мобильных робототехнических комплексов, пусковых установок, орудий и башен самоходных артиллерийских установок.
Известны электропривод боевой машины БМ-21 (Боевая машина БМ-21. Техническое описание и инструкция по эксплуатации. М.: Военное издательство, 1982 г. ) и электрический силовой привод 9 В621 изделия 9П140 (Изделие 9П140. Техническое описание и инструкция по эксплуатации. 9П140 Т02. Книга 2. Электрический силовой привод 9 В621. ПБ1.331.017 ТО. М.: Военное издательство, 1985 г.), обеспечивающие выработку сигналов управления на электромагнитные муфты тормозов, содержащихся в механических передачах. Их недостатком является возможность наведения объекта управления только в полуавтоматическом режиме по сигналам управления скоростью наведения, вырабатываемым пультом управления при отклонении на нем рукояток оператором.
Наиболее близким устройством того же назначения к заявленному изобретению по совокупности признаков является привод наведения (Баунин В.Г. Разработка алгоритма управления приводом наведения с механической передачей, содержащей тормоз // Научный вестник. Развитие систем управления. - 2024. - №2 (6). - С. 42-51, рис. 1), принятый за прототип. Он содержит последовательно соединенные первый сумматор, ПИ-регулятор, ключ, цифро-аналоговый преобразователь, второй сумматор, последовательное корректирующее звено, третий сумматор, масштабный усилитель, усилитель мощности, исполнительный двигатель, выход которого механически связан с объектом управления, датчик скорости, вход которого механически связан с выходом исполнительного двигателя, датчик угла, вход которого механически связан с объектом управления, а выход соединен со вторым входом первого сумматора, тормоз, выход которого механически связан с объектом управления, корректирующее звено обратной связи по току якоря исполнительного двигателя, вход которого соединен с выходом усилителя мощности, а выход соединен со вторым входом третьего сумматора, корректирующее звено обратной связи по скорости, вход которого соединен с выходом датчика скорости, а выход соединен со вторым входом второго сумматора, аналого-цифровой преобразователь, вход которого соединен с выходом датчика скорости, последовательно соединенные первый блок вычисления абсолютного значения, первое пороговое устройство, первый элемент И, элемент ИЛИ, последовательно соединенные второе пороговое устройство и второй элемент И, выход которого соединен со вторым входом элемента ИЛИ, последовательно соединенные второй блок вычисления абсолютного значения, третье пороговое устройство, третий элемент И, элемент НЕ, выход которого соединен с входом тормоза, вторым входом первого элемента И, вторым управляющим входом ПИ-регулятора и вторым управляющим входом ключа, вход первого блока вычисления абсолютного значения соединен с выходом первого сумматора, вход второго порогового устройства соединен с выходом первого блока вычисления абсолютного значения, второй вход второго элемента И соединен с выходом третьего элемента И, вход второго блока вычисления абсолютного значения соединен с выходом аналого-цифрового преобразователя, второй вход третьего элемента И соединен с выходом элемента ИЛИ, первый вход первого сумматора является входом привода наведения.
Недостатками этого устройства являются недостаточные быстродействие и надежность.
Задачей предлагаемого изобретения является повышение быстродействия и надежности.
Сущность технического решения заключается в следующем. Наведение инерционных объектов управления, например пусковых установок, осуществляется приводами наведения, замкнутыми по положению объекта в инерциальной системе координат. При этом наведение объекта управления осуществляется по сигналу рассогласования, вырабатываемому в результате сравнения требуемого (заданного) и текущего его угловых положений. В результате обработки сигнала рассогласования формируется сигнал управления, который с помощью усилителя мощности усиливается до уровня, необходимого для управления исполнительным двигателем, осуществляющим посредством механической связи воздействие на объект управления. Под воздействием исполнительного двигателя объект управления перемещается в направлении уменьшения рассогласования до тех пор, пока рассогласование не уменьшится до нуля или до некоторого допустимого уровня, обусловленного требуемой точностью наведения.
По завершении наведения для обеспечения удержания неуравновешенного объекта управления в требуемом положении без потребления энергии исполнительным двигателем при использовании обратимых механических передач находят применение встраиваемые в них тормоза.
При этом для перемещения объекта управления от аппаратуры привода наведения должно быть подано электрическое напряжение на обмотку управления тормоза для его растормаживания. После завершения процесса перемещения объекта управления в заданное положение для его удержания без потребления энергии исполнительным двигателем аппаратура привода наведения должна снять электрическое напряжение с обмотки управления тормоза.
С целью обеспечения минимального времени наведения и исключения аварийных ситуаций, при которых объект управления заторможен, а исполнительный двигатель на протяжении длительного времени развивает большой движущий момент, необходимо формировать сигнал управления тормозом с учетом имеющейся информации о текущих значениях физических величин, характеризующих процесс наведения объекта управления.
В прототипе сигнал управления тормозом и сигнал на снятие сигнала управления исполнительным двигателем вырабатываются одновременно в результате анализа текущей абсолютной величины рассогласования и текущей абсолютной величины скорости вращения вала исполнительного двигателя, измеряемой датчиком скорости.
При этом возможна ситуация, в которой сигнал на затормаживание тормоза и сигнал на снятие сигнала управления исполнительным двигателем будут выработаны при вращении вала исполнительного двигателя в сторону увеличения рассогласования. В результате этого за время срабатывания тормоза и остановки исполнительного двигателя объект управления может переместиться от заданного положения на недопустимую угловую величину, вследствие чего потребуется дополнительное его наведение, что приведет к увеличению времени на перемещение объекта управления в заданное положение с требуемой точностью.
Кроме того, при одновременной выработке сигналов на растормаживание тормоза и сигнала управления исполнительным двигателем вследствие инерционности обмотки управления тормозом возможно действие большого движущего момента, развиваемого исполнительным двигателем при не полностью расторможенном тормозе, вследствие чего снижаются показатели надежности привода наведения.
Также при одновременной выработке сигнала на затормаживание тормоза и сигнала на снятие сигнала управления исполнительным двигателем вследствие инерционности срабатывания тормоза под действием значительного момента неуравновешенности объект управления может переместиться от заданного положения на недопустимую угловую величину, вследствие чего потребуется дополнительное его наведение, что приведет к увеличению времени на перемещение объекта управления в заданное положение с требуемой точностью.
Повышение быстродействия и надежности привода наведения может быть достигнуто за счет введения в схему выработки сигнала управления тормозом и сигнала на снятие сигнала управления исполнительным двигателем схемы, выполняющей анализ совпадения знаков сигналов рассогласования и скорости исполнительного двигателя, а также схемы, обеспечивающей задержку на выработку сигнала на прохождение сигнала управления исполнительным двигателем после выработки сигнала на растормаживание тормоза для исключения действия большого момента исполнительного двигателя при не полностью расторможенном тормозе, и задержку на выработку сигнала на снятие сигнала управления исполнительным двигателем после выработки сигнала на затормаживание тормоза для исключения перемещения объекта управления от заданного положения под действием момента неуравновешенности после завершения наведения. Наиболее просто анализ совпадения знаков двух сигналов можно выполнить с помощью последовательно соединенных блока умножения и компаратора. Если знаки сигналов, подаваемых на входы блока умножения, совпадают, то произведение этих сигналов больше нуля и на выходе компаратора имеется сигнал логической единицы. В противном случае на выходе компаратора имеется сигнал логического ноля.
Указанный технический результат при осуществлении изобретения достигается тем, что в привод наведения, содержащий первый сумматор, первый вход которого является входом привода наведения, второй и третий сумматоры, первый ключ, усилитель мощности, исполнительный двигатель, вход которого соединен с выходом усилителя мощности, а выход механически связан с объектом управления, датчик скорости, вход которого механически связан с выходом исполнительного двигателя, датчик угла, вход которого механически связан с объектом управления, а выход соединен со вторым входом первого сумматора, тормоз, выход которого механически связан с объектом управления, последовательно соединенные первый блок вычисления абсолютного значения, первое пороговое устройство, первый элемент И, элемент ИЛИ, последовательно соединенные второе пороговое устройство и второй элемент И, выход которого соединен со вторым входом элемента ИЛИ, последовательно соединенные второй блок вычисления абсолютного значения, третье пороговое устройство, третий элемент И, первый элемент НЕ, выход которого соединен с входом тормоза, первый масштабный усилитель, вход первого блока вычисления абсолютного значения соединен с выходом первого сумматора, вход второго порогового устройства соединен с выходом первого блока вычисления абсолютного значения, второй вход первого элемента И соединен с выходом первого элемента НЕ, второй вход второго элемента И соединен с выходом третьего элемента И, второй вход третьего элемента И соединен с выходом элемента ИЛИ, введены блок умножения, первый вход которого соединен с выходом первого сумматора, второй вход соединен с выходом датчика скорости, компаратор, вход которого соединен с выходом блока умножения, а выход соединен с третьим входом третьего элемента И, второй масштабный усилитель, вход которого соединен с выходом третьего элемента И, выход соединен с первым входом третьего сумматора, первый элемент задержки на такт, вход которого соединен с выходом второго сумматора, второй элемент задержки на такт, вход которого соединен с выходом третьего сумматора, второй ключ, первый вход которого соединен с выходом первого элемента задержки на такт, второй управляющий вход соединен с выходом первого элемента НЕ, а выход соединен со вторым входом второго сумматора, третий ключ, первый вход которого соединен с выходом второго элемента задержки на такт, второй управляющий вход соединен с выходом третьего элемента И, а выход соединен со вторым входом третьего сумматора, четвертое пороговое устройство, вход которого соединен с выходом второго сумматора, пятое пороговое устройство, вход которого соединен с выходом третьего сумматора, второй элемент НЕ, вход которого соединен с выходом пятого порогового устройства, блок коммутации, первый вход которого соединен с выходом четвертого порогового устройства, второй вход соединен с выходом второго элемента НЕ, третий управляющий вход соединен с выходом третьего элемента И, а выход соединен с вторым управляющим входом первого ключа, первый вход первого ключа соединен с выходом первого сумматора, вход усилителя мощности соединен с выходом первого ключа, вход второго блока вычисления абсолютного значения соединен с выходом датчика скорости, вход первого масштабного усилителя соединен с выходом первого элемента НЕ, выход первого масштабного усилителя соединен с первым входом второго сумматора.
В заявленном устройстве повышение быстродействия и надежности обеспечивается введением блока умножения, компаратора, второго масштабного усилителя, второго и третьего ключей, первого и второго элементов задержки на такт, четвертого и пятого пороговых устройств, второго элемента НЕ, блока коммутации.
При изменении на входе привода наведения подлежащего отработке заданного угла наведения на выходе первого элемента НЕ вырабатывается сигнал на растормаживание тормоза. При этом схема, реализованная на первом масштабном усилителе, втором сумматоре, втором ключе, первом элементе задержки на такт, четвертом пороговом устройстве и блоке коммутации, обеспечивает задержку на выработку сигнала на прохождение через первый ключ сигнала рассогласования, используемого для управления исполнительным двигателем, после выработки сигнала на растормаживание тормоза для исключения действия большого момента исполнительного двигателя при не полностью расторможенном тормозе, тем самым повышая надежность привода наведения. По истечении времени, соответствующего этой задержке, этой же схемой формируется сигнал управления первым ключом, по которому он пропускает на вход усилителя мощности сигнал рассогласования с выхода первого сумматора для управления исполнительным двигателем. Усилитель мощности усиливает сигнал рассогласования по мощности до уровня, необходимого для управления исполнительным двигателем. Исполнительный двигатель создает движущий момент, воздействующий на объект управления для его перемещения в сторону уменьшения рассогласования.
В процессе отработки рассогласования с помощью первого, второго и третьего пороговых устройств, блока умножения и компаратора производится анализ текущей абсолютной величины сигнала рассогласования, текущей абсолютной величины скорости вращения вала исполнительного двигателя, измеряемой датчиком скорости, а также сравнение знаков сигналов рассогласования и скорости вращения вала исполнительного двигателя.
При подходе объекта управления к заданному угловому положению, определяемому по одновременному выполнению следующих условий:
- абсолютная величина текущего рассогласования меньше уровня срабатывания первого порогового устройства, выбираемого в 1,5-3 раза ниже уровня допустимой ошибки наведения;
- абсолютная величина сигнала датчика скорости меньше уровня срабатывания третьего порогового устройства;
- произведение сигнала датчика скорости и сигнала рассогласования больше, либо равно нулю,
на выходе первого элемента НЕ посредством схемы, реализованной на блоке умножения, компараторе, первом и втором блоках вычисления абсолютного значения, первом, втором и третьем пороговых устройствах, первом, втором и третьем элементах И, элементе ИЛИ, вырабатывается сигнал на затормаживание тормоза. При этом схема, реализованная на втором масштабном усилителе, третьем сумматоре, третьем ключе, втором элементе задержки на такт, пятом пороговом устройстве, втором элементе НЕ и блоке коммутации, обеспечивает задержку на выработку сигнала на снятие сигнала управления исполнительным двигателем после выработки сигнала на затормаживание тормоза для исключения перемещения объекта управления от заданного положения под действием момента неуравновешенности после завершения наведения, вследствие чего исключается необходимость дополнительного наведения объекта управления, и, соответственно повышается быстродействие.
Таким образом, совокупность перечисленных элементов, соединенных описанным выше способом, позволяет повысить быстродействие и надежность привода наведения.
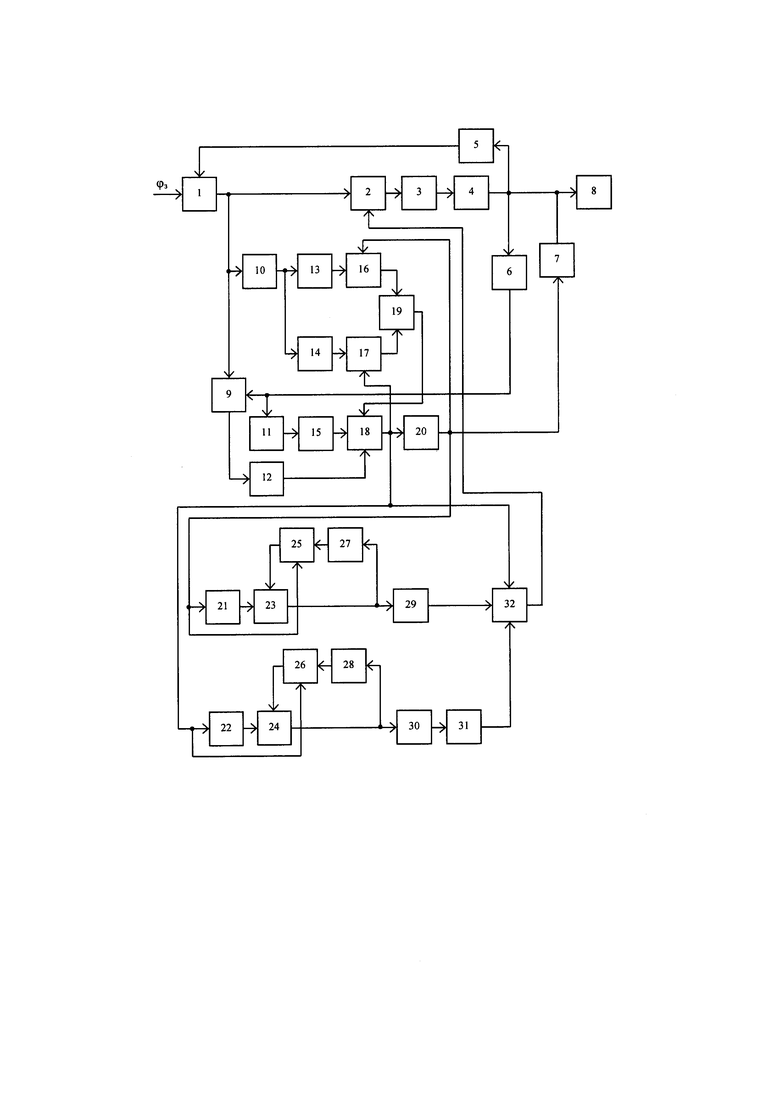
На чертеже изображена схема заявляемого устройства.
На чертеже приняты следующие обозначения:
ϕ3 - заданный угол наведения;
1 - первый сумматор;
2 - первый ключ;
3 - усилитель мощности;
4 - исполнительный двигатель;
5 - датчик угла;
6 - датчик скорости;
7 - тормоз;
8 - объект управления;
9 - блок умножения;
10, 11 - первый и второй блоки вычисления абсолютного значения;
12 - компаратор;
13, 14, 15 - первое, второе и третье пороговые устройства;
16, 17, 18 - первый, второй и третий элементы И;
19 - элемент ИЛИ;
20 - первый элемент НЕ;
21, 22 - первый и второй масштабные усилители;
23, 24 - второй и третий сумматоры;
25, 26 - второй и третий ключи;
27, 28 - первый и второй элементы задержки на такт;
29, 30 - четвертое и пятое пороговые устройства;
31 - второй элемент НЕ;
32 - блок коммутации.
Сведения, подтверждающие возможность осуществления изобретения с получением указанного выше технического результата, заключаются в следующем.
Привод наведения содержит (см. фиг.) первый сумматор 1, первый ключ 2, усилитель мощности 3, исполнительный двигатель 4, датчик угла 5, датчик скорости 6, тормоз 7, выход которого механически связан с объектом управления 8, блок умножения 9, первый и второй блоки вычисления абсолютного значения 10 и 11, компаратор 12, первый, второй и третий пороговые устройства 13, 14, 15, первый, второй и третий элементы И 16, 17, 18, элемент ИЛИ 19, первый элемент НЕ 20, первый и второй масштабные усилители 21 и 22, второй и третий сумматоры 23, 24, второй и третий ключи 25, 26, первый и второй элементы задержки на такт 27, 28, четвертое и пятое пороговые устройства 29, 30, второй элемент НЕ 31, блок коммутации 32.
Первый вход первого сумматора 1 является входом привода наведения. Второй вход первого сумматора 1 соединен с выходом датчика угла 5. Первый и второй управляющий входы первого ключа 2 соединены соответственно с выходом первого сумматора 1 и выходом блока коммутации 32. Вход усилителя мощности 3 соединен с выходом первого ключа 2. Вход исполнительного двигателя 4 соединен с выходом усилителя мощности 3, а выход механически связан с объектом управления 8 и входом датчика скорости 6. Вход датчика угла 5 механически связан с объектом управления 8. Вход тормоза 7 соединен с выходом первого элемента НЕ 20. Первый и второй входы блока умножения 9 соединены соответственно с выходом первого сумматора 1 и выходом датчика скорости 6. Вход первого блока вычисления абсолютного значения 10 соединен с выходом первого сумматора 1. Вход второго блока вычисления абсолютного значения 11 соединен с выходом датчика скорости 6. Вход компаратора 12 соединен с выходом блока умножения 9. Входы первого и второго пороговых устройств 13 и 14 соединены с выходом первого блока вычисления абсолютного значения 10. Вход третьего порогового устройства 15 соединен с выходом второго блока вычисления абсолютного значения 11. Первый и второй входы первого элемента И 16 соединены соответственно с выходом первого порогового устройства 13 и выходом первого элемента НЕ 20. Первый и второй входы второго элемента И 17 соединены соответственно с выходом второго порогового устройства 14 и выходом третьего элемента И 18. Первый, второй и третий входы третьего элемента И 18 соединены соответственно с выходом третьего порогового устройства 15, выходом элемента ИЛИ 19 и выходом компаратора 12. Первый и второй входы элемента ИЛИ 19 соединены соответственно с выходами первого и второго элементов И 16 и 17. Вход первого элемента НЕ 20 соединен с выходом третьего элемента И 18. Вход первого масштабного усилителя 21 соединен с выходом первого элемента НЕ 20. Вход второго масштабного усилителя 22 соединен с выходом третьего элемента И 18. Первый и второй входы второго сумматора 23 соединены соответственно с выходом первого масштабного усилителя 21 и с выходом второго ключа 25. Первый и второй входы третьего сумматора 24 соединены соответственно с выходом второго масштабного усилителя 22 и выходом третьего ключа 26. Первый и второй управляющий входы второго ключа 25 соединены соответственно с выходом первого элемента задержки на такт 27 и с выходом первого элемента НЕ 20. Первый и второй управляющий входы третьего ключа 26 соединены соответственно с выходом второго элемента задержки на такт 28 и с выходом третьего элемента И 18. Вход первого элемента задержки на такт 27 соединен с выходом второго сумматора 23. Вход второго элемента задержки на такт 28 соединен с выходом третьего сумматора 24. Вход четвертого порогового устройства 29 соединен с выходом второго сумматора 23. Вход пятого порогового устройства 30 соединен с выходом третьего сумматора 24. Вход второго элемента НЕ 31 соединен с выходом пятого порогового устройства 30. Первый, второй и третий управляющий входы блока коммутации 32 соединены соответственно с выходами четвертого порогового устройства 29, второго элемента НЕ 31 и третьего элемента И 18.
Привод наведения работает следующим образом.
На выходе первого сумматора 1 вырабатывается сигнал рассогласования в виде разности между подлежащим отработке заданным углом наведения на входе привода наведения и сигналом датчика угла 5.
При изменении на входе привода наведения заданного угла наведения на выходе первого сумматора 1 соответственно изменяется сигнал рассогласования. При превышении абсолютной величиной сигнала рассогласования допустимой ошибки наведения объекта управления 8 на выходах первого и второго пороговых устройств 13 и 14 вырабатываются сигналы логического ноля, в соответствии с которыми на выходах первого и второго элементов И 16 и 17, элемента ИЛИ 19, а также третьего элемента И 18 вырабатываются сигналы логического ноля. При этом на выходе первого элемента НЕ 20 вырабатывается сигнал логической единицы, который поступает на вход тормоза 7. Тормоз 7 при наличии на его входе сигнала логической единицы растормаживается, делая возможным выполнение наведения объекта управления 8.
При наличии на выходе первого элемента НЕ 20 сигнала логической единицы второй ключ 25 замыкается, пропуская сигнал с выхода первого элемента задержки на такт 27 на второй вход второго сумматора 23. На первый вход второго сумматора 23 поступает сигнал логической единицы с выхода первого элемента НЕ 20, умноженный на коэффициент передачи первого масштабного усилителя 21. На выходе второго сумматора 23 формируется линейно нарастающий сигнал, скорость нарастания которого пропорциональна коэффициенту передачи первого масштабного усилителя 21. До достижения сигналом на выходе второго сумматора 23 уровня срабатывания четвертого порогового устройства 29 на выходе четвертого порогового устройства 29 имеется сигнал логического ноля. При наличии на третьем управляющем входе блока коммутации 32 сигнала логического ноля, поступающего с выхода третьего элемента И 18, блок коммутации 32 пропускает на свой выход и далее на второй управляющий вход первого ключа 2 сигнал с первого своего входа, соединенного с выходом четвертого порогового устройства 29. Таким образом, до достижения линейно нарастающего сигнала на выходе второго сумматора 23 уровня срабатывания четвертого порогового устройства 29 на втором управляющем входе первого ключа 2 имеется сигнал логического ноля, в соответствии с которым первый ключ 2 не пропускает сигнал рассогласования с выхода первого сумматора 1 на вход усилителя мощности 3.
При достижении линейно нарастающего сигнала на выходе второго сумматора 23 уровня срабатывания четвертого порогового устройства 29 на выходе четвертого порогового устройства 29 вырабатывается сигнал логической единицы, который через блок коммутации 32 поступает на второй управляющий вход первого ключа 2, который при этом пропускает сигнал рассогласования с выхода первого сумматора 1 на вход усилителя мощности 3. Усилитель мощности 3 усиливает сигнал рассогласования по мощности до уровня, необходимого для управления исполнительным двигателем 4. Исполнительный двигатель 4 создает движущий момент, воздействующий на объект управления 8 для его перемещения в сторону уменьшения рассогласования.
Таким образом, схема, реализованная на первом масштабном усилителе 21, втором сумматоре 23, втором ключе 25, первом элементе задержки на такт 27, четвертом пороговом устройстве 29 и блоке коммутации 32, обеспечивает задержку на выработку сигнала на прохождение через первый ключ 2 сигнала рассогласования, используемого для управления исполнительным двигателем 4, после выработки сигнала на растормаживание тормоза 7 для исключения действия большого момента исполнительного двигателя 4 при не полностью расторможенном тормозе 7, тем самым повышая надежность привода наведения. Время задержки зависит от коэффициента передачи первого масштабного усилителя 21 и порога срабатывания четвертого порогового устройства 29. Чем меньше коэффициент передачи первого масштабного усилителя 21 и больше порог срабатывания четвертого порогового устройства 29, тем больше время задержки.
В процессе отработки рассогласования с помощью первого, второго и третьего пороговых устройств 13, 14, 15, блока умножения 9 и компаратора 12 производится анализ выработанной на выходе первого блока вычисления абсолютного значения 10 текущей абсолютной величины сигнала рассогласования на выходе первого сумматора 1, выработанной на выходе второго блока вычисления абсолютного значения 11 текущей абсолютной величины скорости вращения вала исполнительного двигателя 4, измеряемой датчиком скорости 6, а также сравнение знаков сигналов рассогласования и скорости вращения вала исполнительного двигателя 4.
При подходе объекта управления 8 к заданному угловому положению, определяемому по одновременному выполнению следующих условий:
- абсолютная величина текущего рассогласования меньше уровня срабатывания первого порогового устройства 13, выбираемого в 1,5-3 раза ниже уровня допустимой ошибки наведения объекта управления 8;
- абсолютная величина сигнала датчика скорости 6 меньше уровня срабатывания третьего порогового устройства 15;
- произведение сигнала датчика скорости 6 и сигнала рассогласования больше, либо равно нулю,
на выходах первого порогового устройства 13, третьего порогового устройства 15 и компаратора 12 имеются сигналы логической единицы. На выходе второго порогового устройства 14 также имеется сигнал логической единицы, поскольку уровень его срабатывания выбирается равным допустимой ошибке наведения объекта управления 8, т.е. в 1,5-3 раза выше уровня срабатывания первого порогового устройства 13.
При наличии на выходе первого элемента НЕ 20 сигнала логической единицы на выходах первого элемента И 16 и элемента ИЛИ 19 устанавливаются сигналы логической единицы. В результате этого на выходе третьего элемента И 18 также устанавливается сигнал логической единицы. При этом на выходах первого элемента НЕ 20 и первого элемента И 16 устанавливаются сигналы логического ноля, а на выходе второго элемента И 17 устанавливается сигнал логической единицы, благодаря которому на выходах элемента ИЛИ 19 и третьего элемента И 18 удерживается сигнал логической единицы. Соответственно на выходе первого элемента НЕ 20 удерживается сигнал логического ноля, который поступает на вход тормоза 7 и приводит к его затормаживанию.
При наличии на выходе третьего элемента И 18 сигнала логической единицы третий ключ 26 замыкается, пропуская сигнал с выхода второго элемента задержки на такт 28 на второй вход третьего сумматора 24. На первый вход третьего сумматора 24 поступает сигнал логической единицы с выхода третьего элемента И 18, умноженный на коэффициент передачи второго масштабного усилителя 22. На выходе третьего сумматора 24 формируется линейно нарастающий сигнал, скорость нарастания которого пропорциональна коэффициенту передачи второго масштабного усилителя 22. До достижения сигналом на выходе третьего сумматора 24 уровня срабатывания пятого порогового устройства 30 на выходе пятого порогового устройства 30 имеется сигнал логического ноля, а на выходе второго элемента НЕ 31 - сигнал логической единицы. При наличии на третьем управляющем входе блока коммутации 32 сигнала логической единицы, поступающего с выхода третьего элемента И 18, блок коммутации 32 пропускает на свой выход и далее на второй управляющий вход первого ключа 2 сигнал со второго своего входа, соединенного с выходом второго элемента НЕ 31. Таким образом, до достижения линейно нарастающего сигнала на выходе третьего сумматора 24 уровня срабатывания пятого порогового устройства 30 на втором управляющем входе первого ключа 2 имеется сигнал логической единицы, в соответствии с которым первый ключ 2 пропускает сигнал рассогласования с выхода первого сумматора 1 на вход усилителя мощности 3. Усилитель мощности усиливает сигнал рассогласования до уровня, необходимого для управления исполнительным двигателем 4, который при этом создает момент, необходимый для удержания объекта управления 8 в заданном положении на время затормаживания тормоза 7.
При достижении линейно нарастающего сигнала на выходе третьего сумматора 24 уровня срабатывания пятого порогового устройства 30 на выходе пятого порогового устройства 30 вырабатывается сигнал логической единицы, а на выходе второго элемента НЕ 31 вырабатывается сигнал логического ноля, который через блок коммутации 32 поступает на второй управляющий вход первого ключа 2, в соответствии с которым первый ключ 2 не пропускает сигнал с выхода первого сумматора 1 на вход усилителя мощности 3, обеспечивая снятие сигнала управления исполнительным двигателем 4.
Таким образом, схема, реализованная на втором масштабном усилителе 22, третьем сумматоре 24, третьем ключе 26, втором элементе задержки на такт 28, пятом пороговом устройстве 30, втором элементе НЕ 31 и блоке коммутации 32, обеспечивает задержку на выработку сигнала на снятие сигнала управления исполнительным двигателем 4 после выработки сигнала на затормаживание тормоза 7 для исключения перемещения объекта управления 8 от заданного положения под действием момента неуравновешенности после завершения наведения, вследствие чего исключается необходимость дополнительного наведения объекта управления 8, и, соответственно повышается быстродействие.
Время задержки зависит от коэффициента передачи второго масштабного усилителя 22 и порога срабатывания пятого порогового устройства 30. Чем меньше коэффициент передачи второго масштабного усилителя 22 и больше порог срабатывания пятого порогового устройства 30, тем больше время задержки.
В предлагаемом изобретении при практической реализации могут быть использованы известные схемные реализации сумматора, компаратора, ключа, блока вычисления абсолютного значения, элемента И, элемента ИЛИ, элемента НЕ, порогового устройства, масштабного усилителя, блока умножения, в том числе устройства, реализованные на базе программируемых ЭВМ и контроллеров.
В качестве исполнительного двигателя могут быть использованы электродвигатели постоянного и переменного тока, гидромоторы, поворотные гидравлические секторы, гидроцилиндры, комбинированные подъемно-уравновешивающие механизмы.
В качестве усилителя мощности могут быть использованы электромашинные, полупроводниковые усилители и преобразователи, генераторы, регулируемые насосы.
В качестве датчика угла могут быть использованы индуктивные, индукционные, емкостные, потенциометрические, цифровые датчики, а также гироскопические датчики угла и гироскопические системы.
В качестве блока коммутации могут быть использованы реле, аналоговые ключи и коммутаторы, устройства, реализованные на базе программируемых ЭВМ и контроллеров, а также другие известные реализации, например известная схема (Патент на изобретение №2537256 МПК G05B 13/02, G05B 11/01. Заявлено 18.02.2014. Опубликовано 27.12.2014, фиг. 2).
В качестве датчика скорости могут быть использованы тахогенераторы постоянного и переменного тока, импульсные датчики скорости, гиротахометры, резольверы с соответствующей схемой обработки их выходного сигнала.
В качестве элемента задержки на такт могут быть использованы его известные схемные реализации, например, регистр (Бойков В.И., Болтунов Г.И., Быстрое С.В., Григорьев В.В., Литвинов Ю.В. Цифровая техника систем управления: Учебное пособие. - СПБ.: Университет ИТМО, 2018. -139 с, с. 37-39), устройства задержки, реализованные на базе программируемых ЭВМ и контроллеров.
В качестве тормоза могут быть использованы фрикционные тормоза с электромагнитами, электромагнитные муфты и тормоза, муфты с магнитоэлектрическим управлением, а также другие известные реализации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система наведения | 2023 |
|
RU2815295C1 |
| Система автоматического сопровождения цели | 2023 |
|
RU2803285C1 |
| Система управления наведением инерционного объекта | 2022 |
|
RU2795844C1 |
| Система наведения | 2023 |
|
RU2819712C1 |
| Следящий привод наведения | 2024 |
|
RU2835471C1 |
| Привод наведения | 2023 |
|
RU2817037C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| Регулятор давления жидкости | 1988 |
|
SU1536359A1 |
| Следящая система | 1979 |
|
SU849133A2 |
Изобретение относится к области систем автоматического управления и касается привода наведения. Привод содержит первый, второй и третий сумматоры, первый, второй и третий ключи, усилитель мощности, исполнительный двигатель, датчик скорости, тормоз, датчик угла, первый и второй блоки вычисления абсолютного значения, первое, второе, третье, четвертое и пятое пороговые устройства, первый, второй и третий элементы И, элемент ИЛИ, первый и второй элементы НЕ, блок умножения, компаратор, первый и второй масштабные усилители, первый и второй элементы задержки на такт, блок коммутации. Технический результат заключается в повышении надежности и быстродействия устройства. 1 ил.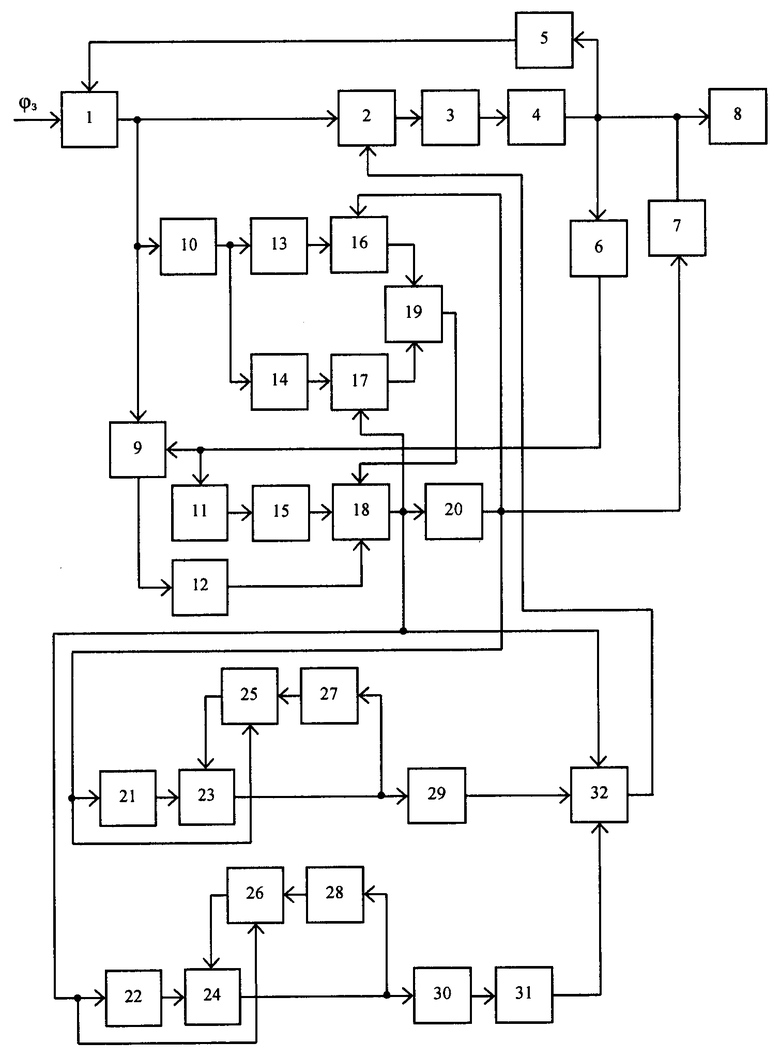
Привод наведения, содержащий первый сумматор, первый вход которого является входом привода наведения, второй и третий сумматоры, первый ключ, усилитель мощности, исполнительный двигатель, вход которого соединен с выходом усилителя мощности, а выход механически связан с объектом управления, датчик скорости, вход которого механически связан с выходом исполнительного двигателя, датчик угла, вход которого механически связан с объектом управления, а выход соединен со вторым входом первого сумматора, тормоз, выход которого механически связан с объектом управления, последовательно соединенные первый блок вычисления абсолютного значения, первое пороговое устройство, первый элемент И, элемент ИЛИ, последовательно соединенные второе пороговое устройство и второй элемент И, выход которого соединен со вторым входом элемента ИЛИ, последовательно соединенные второй блок вычисления абсолютного значения, третье пороговое устройство, третий элемент И, первый элемент НЕ, выход которого соединен с входом тормоза, первый масштабный усилитель, вход первого блока вычисления абсолютного значения соединен с выходом первого сумматора, вход второго порогового устройства соединен с выходом первого блока вычисления абсолютного значения, второй вход первого элемента И соединен с выходом первого элемента НЕ, второй вход второго элемента И соединен с выходом третьего элемента И, второй вход третьего элемента И соединен с выходом элемента ИЛИ, отличающийся тем, что в него введены блок умножения, первый вход которого соединен с выходом первого сумматора, второй вход соединен с выходом датчика скорости, компаратор, вход которого соединен с выходом блока умножения, а выход соединен с третьим входом третьего элемента И, второй масштабный усилитель, вход которого соединен с выходом третьего элемента И, выход соединен с первым входом третьего сумматора, первый элемент задержки на такт, вход которого соединен с выходом второго сумматора, второй элемент задержки на такт, вход которого соединен с выходом третьего сумматора, второй ключ, первый вход которого соединен с выходом первого элемента задержки на такт, второй управляющий вход соединен с выходом первого элемента НЕ, а выход соединен со вторым входом второго сумматора, третий ключ, первый вход которого соединен с выходом второго элемента задержки на такт, второй управляющий вход соединен с выходом третьего элемента И, а выход соединен со вторым входом третьего сумматора, четвертое пороговое устройство, вход которого соединен с выходом второго сумматора, пятое пороговое устройство, вход которого соединен с выходом третьего сумматора, второй элемент НЕ, вход которого соединен с выходом пятого порогового устройства, блок коммутации, первый вход которого соединен с выходом четвертого порогового устройства, второй вход соединен с выходом второго элемента НЕ, третий управляющий вход соединен с выходом третьего элемента И, а выход соединен с вторым управляющим входом первого ключа, первый вход первого ключа соединен с выходом первого сумматора, вход усилителя мощности соединен с выходом первого ключа, вход второго блока вычисления абсолютного значения соединен с выходом датчика скорости, вход первого масштабного усилителя соединен с выходом первого элемента НЕ, выход первого масштабного усилителя соединен с первым входом второго сумматора.
| Система автоматического сопровождения цели | 2023 |
|
RU2803285C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| СЛЕДЯЩАЯ СИСТЕМА НАВЕДЕНИЯ | 2006 |
|
RU2347172C2 |
| US 5905351 A1, 18.05.1999. | |||

