Изобретение относится к области приборостроения и может быть использовано для загрузки в многорядовые кассеты полупроводниковых приборов, в частности СВЧ транзисторов с планарными выводами.
Цель изобретения - расширение эксплуатационных возможностей.
На чертеже изображено устройство для укладки изделий, общий вид.
Оно содержит механизм загрузки 1 с наклонным выходным лотком 2, манипулятор-перекладчик 3, захват которого выполнен в виде групповой вакуумной присоски 4, многорядовую приемную кассету 5 с гнездами 6 под изделия, цепной транспортер 7 с ведущей звездочкой 8, на ленте 9 которого выполнены гнезда 10 для загружаемых изделий, привод шагового перемещения цепного транспортера, выполненный в виде мальтийского механизма и содержащий ведущее звено-цевку 11, установленную на валу 12, и мальтийский крест 13, размещенный на валу 14.
На мальтийском кресте 13 выполнены пазы 15, с которыми взаимодействует цевка 11. Верхняя ветвь цепного транспортера 7 содержит наклонный и горизонтальный участки 16, 17, а ведущая звездочка 8 цепного транспортера 7 зафиксирована на валу 14 мальтийского креста 13.
Устройство также содержит установленный на валу 14 диск 18 с профилированными впадинами 19, причем количество профилированных впадин на диске выбрано из соотношения
K=  где Z - количество пазов мальтийского креста;
где Z - количество пазов мальтийского креста;
N - количество рядов изделий в кассете.
Однозубовая храповая муфта содержит ведущее храповое колесо 20 с храповой впадиной 21 и размещенную на валу 12 обойму 22, на которой зафиксирована ось 23 с шарнирно размещенной на этой оси двуплечей подпружиненной храповой собачкой 24, причем одно плечо собачки 24 снабжено профилированным выступом 25, а на другом плече выполнен храповый зуб 26 (пружина храповой собачки 24 на чертеже не показана).
Кроме того, предложенное устройство содержит три снабженных роликами 27-29 рычага 30-32, установленных на одной поворотной оси 33, подпружиненной посредством пружины 34, и кулачок 35 с профилированным рабочим выступом 36. Причем первый рычаг 30 посредством своего ролика 27 взаимодействует с профилированным диском 18, второй рычаг 31 роликом 28 взаимодействует с профилированным выступом 25 храповой собачки 24, а третий рычаг 32 через ролик 29 взаимодействует с профилированным рабочим выступом 36 кулачка 35.
Кулачок 35 кинематически связан с храповым колесом 20 посредством зубчатой передачи, включающей в себя зубчатые колеса 37-40, причем вал 41 зубчатой передачи выполнен ведущим, от которого приводятся в движение все элементы автомата. На кулачке 35 закреплен постоянный магнит 42, который воздействует на однооборотный датчик-геркон 43. Манипулятор-перекладчик 3 снабжен автономным блоком управления 44. В наклонном выходном лотке 2 выполнены направляющие каналы 45 для подлежащих загрузке изделий.
Устройство работает следующим образом.
От электродвигателя с редуктором приводится во вращение ведущий вал 41, от которого через зубчатые колеса 39, 40 и 38, 37 приводятся во вращение храповое колесо 20 и кулачок 35.
Так как зуб 26 храповой собачки 24 посредством пружины (на чертеже не показана) прижат к поверхности храпового колеса 20, то по мере вращения храпового колеса 20 впадина 21 храпового колеса 20 войдет в зацепление с зубом 26 храповой собачки 24, после чего храповая собачка 24 вместе с обоймой 22, на которой она шарнирно установлена, начинает вращаться синхронно с храповым колесом 20 и таким образом приводится во вращение цевка 11 мальтийского механизма.
Цевка 11, взаимодействует с пазами 15 мальтийского креста 13, приводит в пульсирующее вращение диск 18 и ведущую звездочку 8 цепного транспортера 7, которая в свою очередь приводит в пульсирующее движение с периодическими остановками ленту 9 цепного транспортера 7, причем за один оборот цевки 11 лента 9 цепного транспортера 7 перемещается на один шаг.
При этом ролик 27 рычага 30 обкатывается по наружной поверхности диска 18.
Во время одного из выстоев мальтийского креста 13 профилированная впадина 19 диска 18 совместится с роликом 27 рычага 30. Рычаг 30, жестко зафиксированный на поворотной оси 33, под действием пружины 34 повернется против часовой стрелки на некоторый угол, при этом рычаг 31, жестко зафиксированный на оси 33, также повернется против часовой стрелки.
По мере вращения обоймы 22 профилированный выступ 25 храповой собачки 24 войдет во взаимодействие с роликом 28 рычага 31, собачка 24 повернется вокруг оси 23 против часовой стрелки и зуб храповой собачки 24 выйдет из зацепления со впадиной 21 храпового колеса 20.
До тех пор, пока рычаг 31 не будет повернут в исходное положение, храповое колесо 20 будет вращаться, не передавая вращение на цевку 11 мальтийского механизма, т. е. цепной транспортер 7 будет оставаться неподвижным.
Это время длительной основки используется для выгрузки деталей из гнезд 10 ленты 9 цепного транспортера с помощью манипулятора-перекладчика 3.
Запуск цепного транспортера осуществляется следующим образом.
Так как кулачок 35 продолжает вращаться, то его профилированный рабочий выступ 36 входит во взаимодействие с роликом 29 рычага 32, который, поворачиваясь по часовой стрелке, вернет в исходное положение поворотную ось 33, а вместе с ней рычаг 31, причем рабочий выступ 36 кулачка 35 удерживает рычаг 32 в повернутом положении в течение времени, которого достаточно, чтобы храповое колесо 20 сделало 1,5-2,5 оборота.
Таким образом, зуб 26 храповой собачки 24 под действием пружины (на чертеже не показана) будет снова прижат к поверхности храпового колеса 20, через некоторое время войдет в зацепление с впадиной 21 храпового колеса 20, после чего цевка 11 мальтийского механизма будет приведена во вращение.
Во время первого шагового поворота диска 18 его впадина 19 выйдет из-под ролика 27 рычага 30. Таким образом, когда рабочий выступ 36 кулачка 35 отпустит рычаг 32, ролик 27 рычага 30 снова опустится на наружную поверхность диска 18 и будет осуществлять дальнейшее удержание рычага 31 в поднятом положении. Далее цепной транспортер будет приводиться в пульсирующее движение до тех пор, пока одна из впадин 19 диска 18 не совместится с роликом 27 рычага 30.
Постоянный магнит 42 закреплен на кулачке 35 так, что воздействует на однооборотный датчик-геркон 43 в тот момент, когда впадина 19 диска 18 совместится с роликом 27 рычага 30, т. е. в первый момент начала длительной остановки цепного транспортера 7. При этом с датчика-геркона 43 на блок управления 44 поступает сигнал, по которому начинает работать манипулятор-перекладчик 3.
Из загрузочного устройства 1, например, вибробункера, в направляющие каналы 45 наклонного лотка 2 подаются подлежащие набору в кассеты изделия, которые располагаются в этих направляющих каналах 45 сплошным потоком и под действием сил тяжести прижимаются к ленте 9 цепного транспортера 7.
Так как во время выстоя цепного транспортера 7 гнезда 10 под изделия, выполненные в его ленте 9, совмещены с направляющими каналами 45 наклонного лотка 2, то нижние изделия, размещенные в направляющих каналах 45, западают в соответствующие гнезда 10.
В процессе шагового перемещения ленты 9 цепного транспортера 7, все гнезда 10, проходящие мимо наклонного лотка 2, выполнены изделиями.
По мере перемещения ленты 9 цепного транспортера 7 гнезда 10 с загруженными в них изделиями будут переходить на горизонтальный участок 17 верхней ветви цепного транспортера 7 и размещаться в зоне групповой вакуумной присоски 4.
Во время длительной остановки цепного транспортера 7, которая осуществляется за счет остановки цевки 11 мальтийского механизма (т. е. при выходе зуба 26 храповой собачки 24 из зацепления со впадиной 21 храпового колеса 20), от датчика-геркона 43 на блок управления поступает сигнал, по которому манипулятор-перекладчик 3 с помощью групповой вакуумной присоски 4 захватит изделия, размещенные в его зоне действия и перегрузит их в приемную кассету 5.
Причем первая кассета 5 может оказаться не полностью заполненной, но последующие кассеты 5 будут заполнены полностью, так как в зоне действия групповой вакуумной присоски 4 во время длительной основки цепного транспортера 7 будут размещаться только заполненные изделиями гнезда 10.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПЕРЕГРУЗКИ ИЗДЕЛИЙ, ПРЕИМУЩЕСТВЕННО ПОЛУПРОВОДНИКОВЫХ ПРИБОРОВ | 1990 |
|
RU2028698C1 |
| ПРИВОД РАБОЧИХ ОРГАНОВ СЕЛЬСКОХОЗЯЙСТВЕННОЙ МАШИНЫ | 1993 |
|
RU2038729C1 |
| Устройство смены рисунка по утку к бесчелночному ткацкому станку | 1983 |
|
SU1170015A1 |
| ПЕЧАТНО-ОТМЕТОЧНАЯ МАШИНА | 1968 |
|
SU210186A1 |
| АВТОМАТИЧЕСКАЯ РЕВОЛЬВЕРНАЯ ГОЛОВКА | 1990 |
|
RU2035268C1 |
| МАЛЬТИЙСКИЙ МЕХАНИЗМ | 1967 |
|
SU223544A1 |
| АВТОМАТИЧЕСКАЯ РАССАДОПОСАДОЧНАЯ МАШИНА | 1990 |
|
RU2032302C1 |
| УСТРОЙСТВО для СБОРКИ ПАКЕТА В ОТДЕЛОЧНОМ ПРОИЗВОДСТВЕ ДЛЯ КРАШЕНИЯ ПРЯЖИ В БОБИНАХ | 1967 |
|
SU202864A1 |
| МЕХАНИЗМ ИЗМЕНЕНИЯ ФОРМЫ СТРОЧКИ ШВЕЙНОЙ МАШИНЫ "ЗИГЗАГ" | 1990 |
|
RU2023086C1 |
| Механизм управления сменой рисунка по утку к бесчелночному ткацкому станку | 1980 |
|
SU1055788A1 |
Изобретение относится к электронной технике и может быть использовано при производстве полупроводниковых приборов, преимущественно СВЧ-транзисторов с планарными выводами. Цель изобретения - расширение эксплуатационных возможностей, достигаетя за счет того, что устройство содержит установленный на валу 14 диск 18 с профилированными впадинами 19, однозубую храповую муфту, состоящую из ведущего храпового колеса 20 с храповой впадиной 21 и жестко связанной с цевкой 11 обоймой 22 с осью 23 и с шарнирно размещенной на ней двуплечей храповой собачкой 24, одно плечо которой снабжено профилированным выступом 25, а на другом выполнен храповой зуб 26. Устройство также содержит три рычага 30 - 32, жестко зафиксированных на одной поворотной оси 33, подпружиненной пружиной 34, и кулачок 35, причем рычаг 30 взаимодействует посредством своего ролика 27 с профилированным диском 18, рычаг 31 роликом 28 взаимодействует с профилированным выступом 25 храповой собачки 24, а рычаг 32 через ролик 29 взаимодействует с профилированным рабочим выступом 36 кулачка 35, который кинематически связан с храповым колесом 20 посредством зубчатой передачи, имеющей зубчатые колеса 37 и 40. Вал 41 зубчатой передачи выполнен ведущим. На кулачке 35 закреплен постоянный магнит 42, который воздействует на однооборотный датчик 43. Манипулятор-перекладчик 3 снабжен автономным блоком управления 44. В наклонном выходном лотке 2 выполнены направляющие каналы 45 для загружаемых изделий. 1 ил.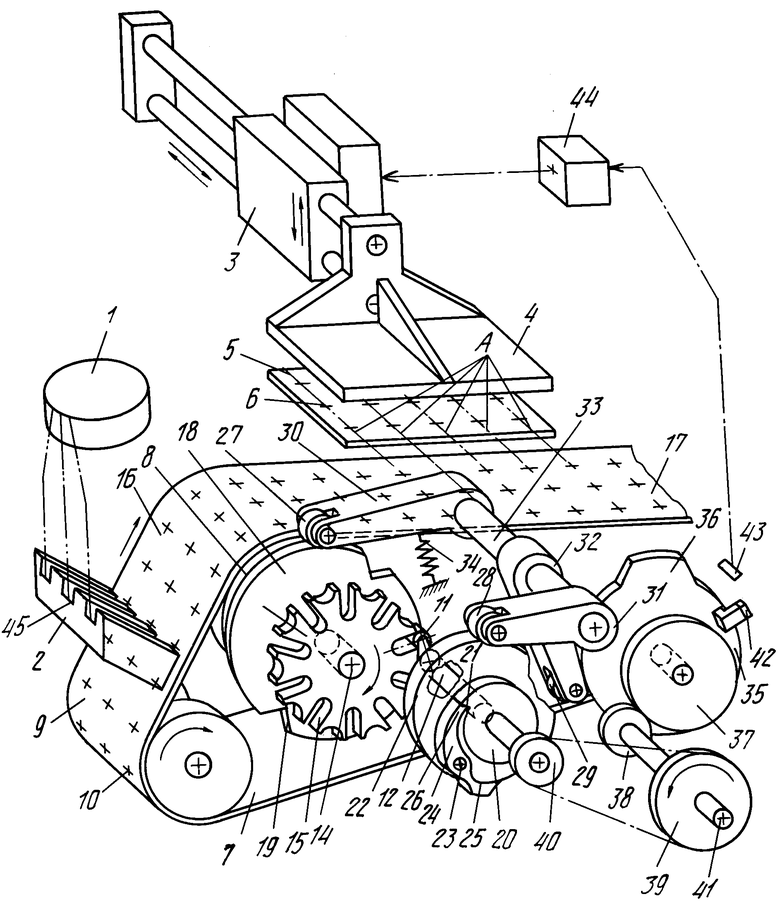
УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ ПРЕИМУЩЕСТВЕННО В МНОГОРЯДОВЫЕ КАССЕТЫ, содержащее механизм загрузки, транспортирующий механизм в виде цепного транспортера с гнездами под изделия с приводом его перемещения, выполненный в виде мальтийского механизма, отличающееся тем, что, с целью расширения эксплуатационных возможностей, привод транспортера снабжен диском с профилированными впадинами, жестко связанным с мальтийским крестом, однозубой храповой муфтой, выполненной в виде ведущего храпового колеса и жестко связанной с цевкой обоймы с шарнирно размещенной на ней двуплечей храповой собачкой, на одном из плеч которой выполнен профилированный выступ, рычагами, жестко зафиксированными на одной поворотной подпружиненной оси, и кулачком, причем первый рычаг размещен с возможностью взаимодействия с профилированным диском, второй рычаг размещен с возможностью взаимодействия с профилированным выступом храповой собачки, а третий рычаг размещен с возможностью взаимодействия с кулачком, кинематически связанным с храповым колесом посредством зубчатой передачи, причем количество профилированных впадин (K) на диске выбрано из соотношения
K = Z/N,
где Z - количество пазов мальтийского креста;
N - количество рядов изделий в кассете.
