Изобретение относится к радионавигации и может найти применение при управлении транспортными средствами.
Известно устройство контроля расположения транспортных средств, в котором центр управления и каждое транспортное средство оборудованы радиотелефонами, с помощью которых осуществляется обмен информацией о расположении транспорта на маршруте (радиосвязь такси, машин медицинской помощи и т.п.).
Однако в таком устройстве усложняется автоматизация процессов контроля, так как радиотелефонный сигнал от транспортных средств необходимо преобразовать в удобный для дальнейшей обработки вид, что технически сложно реализовать. Кроме того, такое устройство не может обеспечить проверку правильности передаваемых сообщений.
Известны также устройства контроля, в состав аппаратуры центра управления которых входят последовательно включенные приемник, система обработки данных в реальном масштабе времени и устройство индикации, а в состав аппаратуры транспортного средства входят последовательно включенные приемник сигналов радионавигационной системы и передатчик. В этих устройствах приемник сигналов радионавигационной системы вырабатывает сигнал для модулирования передатчика. На центре управления переданные сигналы принимают и по ним определяют местоположение транспортного средства в реальном масштабе времени и отображают это местоположение на устройстве индикации. В этих устройствах обеспечивается автоматизация процесса контроля и отображения местоположения транспортного средства, устраняется возможность получения преднамеренно ложных сообщений.
Недостаток этих устройств заключается в возможности контроля только одного транспортного средства, так как центр управления должен работать в реальном масштабе времени в соответствии с временной диаграммой сигналов используемой радионавигационной системы.
В радиотелефоне с возможностью передачи данных о положении, который выбран в качестве прототипа, этот недостаток устранен. Устройство-прототип содержит центр управления, в состав аппаратуры которого входят последовательно включенные приемник, вход которого является входом аппаратуры центра управления, и индикаторное устройство, а также последовательно включенные генератор входовых посылок и передатчик, выход которого является выходом аппаратуры центра управления. Выход генератора кодовых посылок соединен также с вторым входом индикаторного устройства. Имеется также аппаратура на каждом транспортном средстве, в состав которой входят последовательно включенные приемоиндикатор и передатчик, причем выход передатчика является выходом аппаратуры транспортного средства, а второй вход последней соединен с вторым входом передатчика через приемник транспортного средства.
Недостатком радиотелефона с возможностью передачи данных о положении является пониженная пропускная способность центра управления. Действительно время ожидания ответного сообщения в центре управления составляет
Тож = 2Тцтi + Тз + Тм, Тцтi = Рцтi/Со, (1) где Тцтi - время распространения сигнала между центром управления и транспортным средством с запрашиваемым номером; Тз - длительность сигнала запроса; Тм - длительность сигнала о местоположении транспортного средства; Pцтi - расстояние между центром управления и транспортным средством с запрашиваемым номером i; Со - скорость распространения электромагнитной волны. Поскольку величина Рцтi априорно не известна, то в качестве нее следует брать максимально возможное значение (Рцтiмак) - дальность действия линии радиосвязи между центром и транспортным средством. Обычно величина (Tз + Тм) << 2Тцтiмак, т.е. большую часть времени ожидания в центре управления при приеме составляет время распространения запросного и ответного сигналов, что при заданном темпе обновления информации (Т) о местоположении транспортных средств однозначно определяет пропускную способность центра управления в соответствии с выражением
Нмакс = T/Тож, (2) где Нмакс - максимальный номер транспортного средства.
Целью изобретения является повышение пропускной способности центра управления за счет сокращения времени ожидания.
Сущность изобретения заключается в том, что в системе контроля местоположения транспортных средств, содержащей центр управления, в состав аппаратуры которого входят последовательно включенные приемник, вход которого является первым входом аппаратуры центра управления, и индикаторное устройство, и транспортные средства, в состав аппаратуры каждого из которых входят последовательно включенные приемоиндикатор и передатчик, причем выход последнего является выходом аппаратуры транспортного средства, а вход последнего соединен с входом приемоиндикатора, в аппаратуру центра управления введены последовательно включенные приемоиндикатор и формирователь номера транспортного средства, причем вход приемоиндикатора является вторым входом аппаратуры центра управления, выход формирователя номера транспортного средства соединен с вторым входом индикаторного устройства, а на каждом транспортном средстве второй выход приемоиндикатора соединен с вторым входом передатчика.
Наличие в предлагаемой системе новых по сравнению с прототипом блоков и связей свидетельствует о соответствии его критерию "новизна".
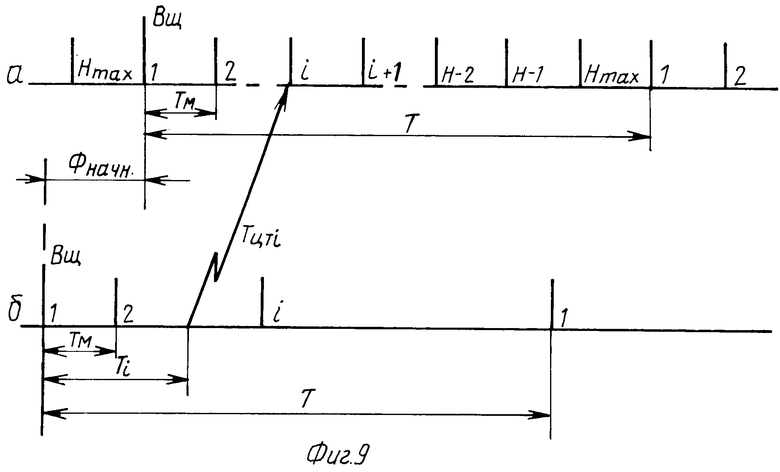
Введение новых блоков и связей позволяет отказаться от кодового разделения радиоканалов обмена между центром управления и транспортными средствами, который используется в устройстве-прототипе, и перейти к временному разделению названных каналов. При этом не требуется ожидать поступления запросного сигнала на транспортное средство, что уменьшает значение Тож на величину Тцтi + Тз. Для пояснения сущности предлагаемой системы контроля местоположения транспортных средств в центре управления рассмотрим фиг.9. На фиг.9а приведена диаграмма шкалы времени центра управления с периодом повторения, равным Т. Этот период повторения равномерно разбит на участки протяженностью Тм, каждый из которых отведен под прием сигнала о местоположении транспортного средства с определенным номером (обозначено цифрой в начале каждого интервала Тм). На фиг.9б приведена аналогичная диаграмма для транспортного средства с номером i, которая имеет начальный фазовый сдвиг Фначi. Если на транспортном средстве с номером i произвести передачу сигнала о своем местоположении в момент времени относительно начала своей шкалы времени с задержкой, равной
Тзi = (i - 1)Тм - Фначi - Тцтi, (3) то этот сигнал поступает в центр управления на интервале времени от момент i до момента i + 1 на фиг.9а. Если выражение (3) отрицательно, то излучение сигнала проводится с задержкой ТIзi = Т + Тзi. Величина Тцтi определяется координатами центра управления (например, прямоугольными Хц, Yц, которые известны априорно) и измеренными на транспортном средстве с номером i собственными координатами (Хi, Yi) по известным выражениям
Tцтi= Co
Co
(4)
Таким образом и передаваемые транспортным средством сообщения оказываются разделенными во времени, что позволяет сократить Тож еще на величину Тцтi.
Совокупность существенных отличительных признаков нова по сравнению с прототипом, вместе с общими существенными признаками приводит к достижению цели и не обнаружена в известных науке и технике решениях. Следовательно, предлагаемая система соответствует критерию "существенные отличия".
На фиг. 1 приведена структурная схема заявляемой системы контроля местоположения транспортных средств; на фиг.2-8 представлены структурные схемы отдельных ее блоков; на фиг.9-13 - временные диаграммы для пояснения работы системы контроля местоположения транспортных средств.
На фиг.1-8 Ц - центр управления, ТСi - транспортное средство с номером i, 1 - приемник (ПРМ), 2 - индикаторное устройство (ИУ), 3 - приемоиндикатор (ПИ), 4 - передатчик (ПРД), 5 - ПИ, 6 - формирователь номера транспортного средства (ФНТС), 7 - радиоприемное устройство (РПУ), 8, 9, 10 - полосовой фильтр (ПФ), 11, 12, 13 - детектор (ДЕТ), 14 - триггер (Т), 15 - ждущий мультивибратор (ЖМВ), 16 - линия задержки (ЛЗ), 17 - сдвигающий регистр (СРГ), 18 - устройство отображения (УО), 19 - электронная вычислительная машина (ЭВМ), 20 - синхронизатор (С), 21-РПУ 22 - аналого-цифровой преобразователь (АЦП), 23 - ЭВМ, 24 - Т, 25 - кодер, 26 - радиопередающее устройство (РПДУ), 27 - делитель частоты (ДЧ), 28 - счетчик (СЧ), 29 - Т, 30 - селектор адреса (СА), 31 - магистральный буферный регистр (МБР), 32 - буферный регистр (БР), 33 - устройство равнозначности (УР), 34 - Т, 35 - элемент И (И), 36 - СЧ, 37 - постоянное запоминающее устройство (ПЗУ), 35 - дешифратор (ДШ), 39 - МБР, 40 - УР, 41 - И, 42 - Т, 43 - опорный генератор (ОГ), 44, 45,. - ДЧ, 46, 47 - Т, 48 - И, 49 - Т, 50 - И, 51 - инвертор (НЕ), 52 - Т, 53 - И, 54 - НЕ, 55 - И, 56 - МБР, 57 - СРГ, 58 - И, 59 - элемент (ИЛИ), 60 - СА, 61 - И, 62, 63 - генератор (Г), 64 - И, 65 - Г, 66 - И, 67 - Т, 68 - ЖМВ, 69 - ДЧ, 70 - ДШ, 71 - НЕ. 72 - Т, 73, 74 - НЕ.
Система контроля местоположения ТС включает Ц (фиг.1), в состав аппаратуры которого входят последовательно включенные ПРМ1, вход которого является первым входом аппаратуры Ц , и ИУ2, и ТС, в состав аппаратуры каждого из которых входят последовательно включенные ПИ3 и ПРД4, причем выход ПРД является выходом аппаратуры ТС, а вход последней соединен с входом ПИ3. В аппаратуру Ц введены последовательно включенные ПИ5 и ФНТС8, причем вход ПИ5 образует второй вход аппаратуры Ц, а выход ФНТС соединен с вторым входом ИУ2. На каждом ТС дополнительный выход ПИ3 соединен с вторым входом ПРД 4.
ПРМ1 служит для приема сообщений с ТС и их декодирования. Он состоит (фиг. 2) их РПУ7, вход которого является входом ПРМ1, а выход подключен к входам ПФ8 - 10. Последние соединены с входами соответствующих ДЕТ11 - 13. Выход ДЕТ 11 подключен к последовательно соединенным Т14 (по цепи S-вход, выход Q), ЖМВ 15, ЛЗ16 и СРГ17. Выход ДЕТ12 подан на второй вход СРГ17, а выход ДЕТ13 - на R-вход Т14. Выход СРГ17 и Q-выход Т14 образуют выход ПРМ1.
ИУ2 отображает принимаемую информацию о положении ТС и состоит ( фиг.3) из последовательно включенных ЭВМ19 и УО18. Два входа ЭВМ19 образуют первый и второй входы ИУ2.
ПИ3(5) (фиг.4) служит для определения местоположения ТС по радионавигационным системам (например, типа Лоран-С) и "привязки" временных шкал к сигналам любой (например, ведущей) станции радионавигационной системы ПИ3(5) содержит последовательно включенные между его входом и выходом РПУ21, АЦП22 и ЭВМ23, причем выход последней соединен также с вторым входом РПУ21 и входом С20, первый выход которого является дополнительным выходом ПИ3(5), а второй подан на вторые входы АЦП22 и ЭВМ23.
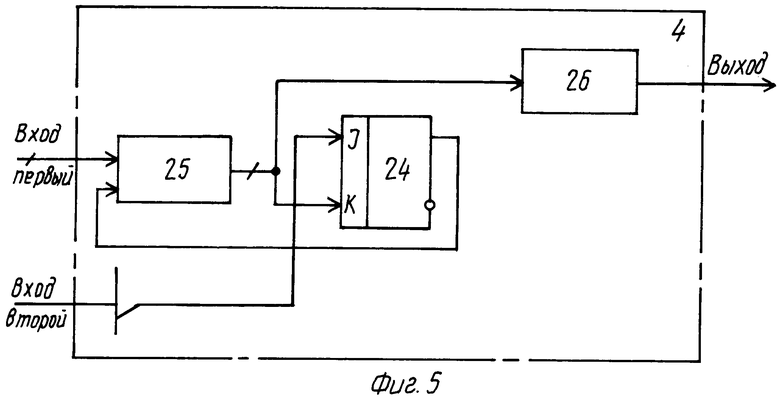
ПРД4 передает информацию с ТС и содеpжит последовательно включенные между первым входом и выходом (фиг.5) КД25 и РПДУ26. Выход КД25 соединен также с К-входом Т24, I-вход которого образует второй вход ПРД4, а выход Q подключен к второму входу КД25.
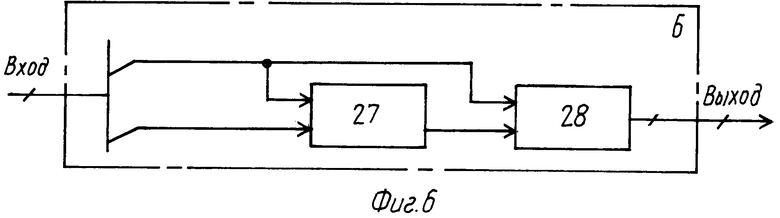
ФНТС6 обеспечивает формирование сигналов номера ТС и включает (фиг.6) последовательно соединенные ДЧ27 и СЧ28, выход которого является выходом ФНТС6, а вход ДЧ27 и объединенные вторые их входы образуют вход ФНТС6.
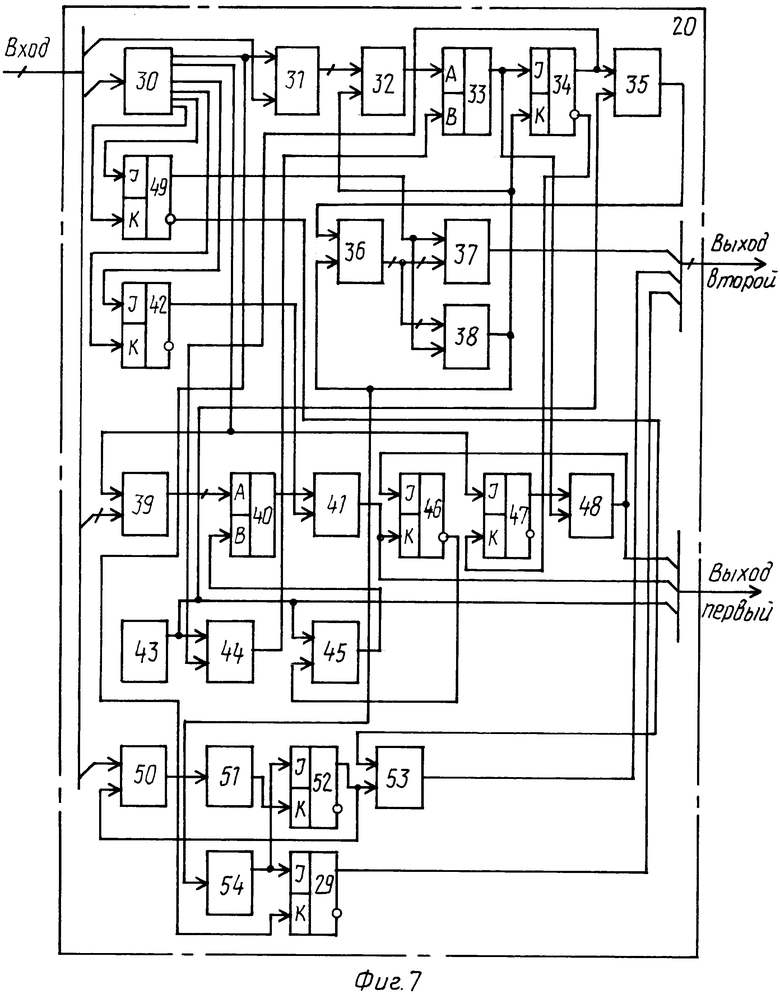
С20 обеспечивает формирование необходимых для ПИ3(5) сигналов управления и содержит (фиг.7) последовательно включенные СА30, МБР31, БР32, УР33 (по входу А), Т34 (от I-входа к выходу Q), И35, СЧ36 и ПЗУ37. Второй выход СА30 соединен с последовательной цепью МБР39, УР40 (по входу А) и И41, второй вход которого подан на выход Q T42 I- и К-входы последнего соединены соответственно с третьим и четвертым выходами СА30, ОГ43 соединен с входом В УР33 через ДЧ44, а через ДЧ45 с входом В УР40. Второй вход ДЧ44 подан на выход Q Т34, а второй вход ДЧ45 - на выход Q Т46, К-входы Т46 и Т47 соединены соответственно с выходом И41 и выходом Q Т34, I-вход Т46 - с выходом И48, I-вход Т47 - с вторым выходом СА30, а его выход Q - с первым входом И48. Второй вход последнего соединен с выходом УР33. Пятый и шестой выходы СА30 поданы соответственно на I- и К-входы Т49. Вход С20 образуют соединенные входы СА30, вторые входы МБР31, МБР39 и первый вход И50, выход которого подан на последовательно включенные НЕ51, Т52 (от К-входа к выходу Q) и И53. Второй вход последнего подключен к выходу Q Т49, выход Q которого соединен с вторыми входами ПЗУ37, ДШ38. Выход ДШ38 соединен с вторыми входами БР32 и СЧ36, К-входом Т34 и через НЕ54 с I-входами Т52 и Т29, К-вход которого подан на первый выход СА30. Выход Q Т52 соединен с вторым входом И50. Выход ОГ43 соединен с вторым входом И35. Выходы ПЗУ370, И53 и выход Q Т29 образуют второй выход С20, а ее первый выход образован выходами И 41, И48 и ОГ43.
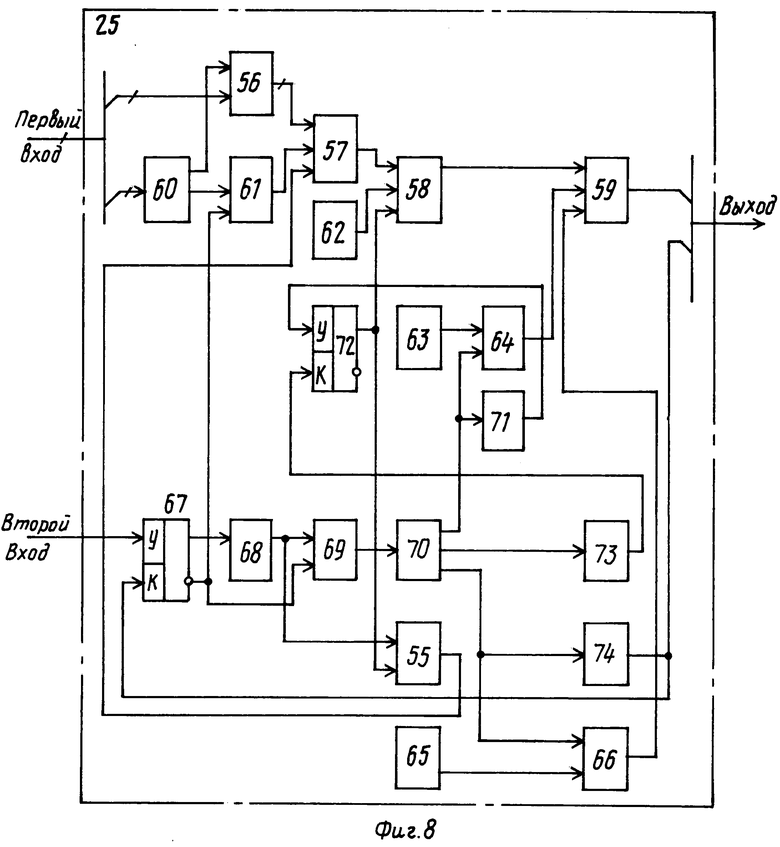
КД25 служит для кодирования информации о местоположении ТС. Он содержит (фиг. 8) последовательно включенные МБР56, СРГ57, И58 и ИЛИ59. К второму входу СРГ57 подключены последовательно включенные СА60 и И61. Входы МБР56 и СА60 образуют первый вход КД25. Второй выход СА60 соединен с вторым входом МБР56. Второй вход И58 подан на выход Г62, а второй вход ИЛИ 59 - на выход Г63 через И64. Третий вход ИЛИ 59 подключен к Г65 через И66. Второй вход КД 25 подан к последовательно соединенным Т67 (от I-входа к выходу Q)б ЖМВ68, ДЧ69, ДШ70, НЕ71 и Т72 (от I-входа к выходу Q), который соединен с третьим входом И58. Второй выход ДШ70 через НЕ73 соединен с К-входом Т72, а его третий выход через НЕ74 - с К-входом Т67. Выход ЖМВ68 через И55 соединен с третьим входом СРГ57. Второй вход И55 соединен с выходом Q Т72. Выход Q Т67соединен с вторыми входами И61 и ДЧ69. Вход НЕ74 соединен с вторым входом И66. Выходы ИЛИ59 и НЕ74 образуют выход КД25.
Работает система контроля местоположения ТС следующим образом.
На каждом ТС с помощью ПИ3 производится измерение местоположения. Для этого сначала производятся поиск сигналов радионавигационной системы, определение положения их фронта (допоиск) и точное измерение фазы принимаемого сигнала с одновременным устранением многозначности фазовых измерений. Во всех этих режимах РПУ21 осуществляет фильтрацию радиоимпульсных радионавигационных сигналов. Пpи этом в режиме поиска полоса пропускания РПУ21 выбирается оптимальной для решения задачи обнаружения сигналов (4-5 кГц), а в остальных режимах - оптимальной для решения задачи фазовых измерений (20-30 кГц). Кроме того, с помощью РПУ21 обеспечиваются предельное ограничение сигналов в режиме поиска, что приводит к бинарному квантованию по уровню, и стабилизация уровней выходных сигналов в остальных режимах в линейной области для решения задач разрешения многозначности фазовых измерений. Управление полосой и усилением РПУ21 осуществляет сигнал на его втором входе.
АЦП22 преобразует аналоговый сигнал с выхода РПУ21 в цифровой сигнал на своем выходе. Преобразованию подвергаются выборки входного сигнала, взятые в определенные моменты времени, определяемые сигналом на втором входе АЦП22. Таким образом, выходной сигнал АЦП22 квантован по амплитуде и во времени.
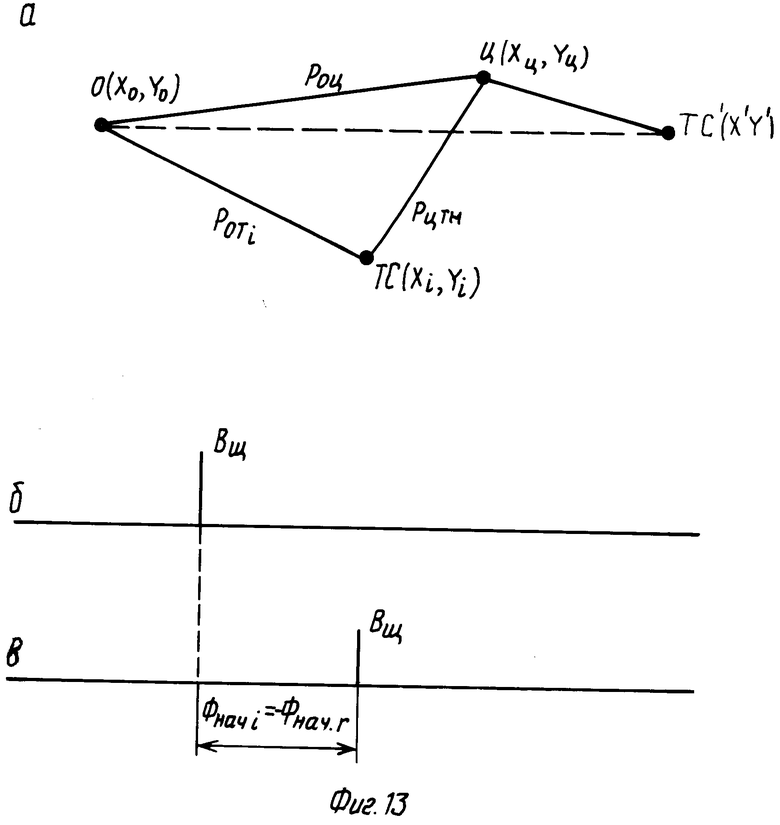
Квантованные выборки с выхода АЦП22 поступают на ЭВМ23, где реализуются все необходимые алгоритмы обработки сигналов радионавигационной системы, которые хорошо известны специалистам в данной области. Сигнал на втором входе ЭВМ23 обеспечивает согласование временной диаграммы сигналов с циклом ее работы. Выходной сигнал ЭВМ23 содержит измеренные координаты ТС (например, прямоугольные Хi, Yi) команды управления полосой и усилением РПУ21, команды управления С20. Кроме того, в отличие от известных ПИ ЭВМ23 производит расчет величины Тзi в соответствии с выражением (3). Входящие в него значения i и Тм априорно известны. Величина Тцтi определяется из выражения (4) по априорно известным координатам Ц Хц и Yц и измеренным ПИЗ координатам ТС Хi и Yi. Для выявления алгоритма вычисления величины Фначi рассмотрим фиг.13а. На ней обозначено априорно известное положение ведущей станции О (Хо, Yо), Ц (Хц, Yц) и ТС с номером i - ТСi (Xi, Yi). В соответствии с фиг.9а величина Фначi - разница во времени прихода сигналов ведущей станции на ТС и в Ц, которая в соответствии с фиг.13а определяется через соответствующие расстояния в соответствии с выражением
Фначi = (Pотi - Роц)/Со, где расстояние Ротi определяются из выражения (4) при замене координат Ц на координаты станции О, а расстояние Роц - координат ТСi на координаты той же станции, Выражения не изменяются при нахождении ТСi в точке ТСi на фиг.13а. В этом случае сигнал ведущей станции приходит на Ц (фиг.13б) раньше, чем он поступает на ТС (фиг.13в) и Фначi изменяет свой знак (так как Ротi > Роц). Все априорные данные (i, Тм, Хо, Хц и т.д,) занесены в память ЭВМ23.
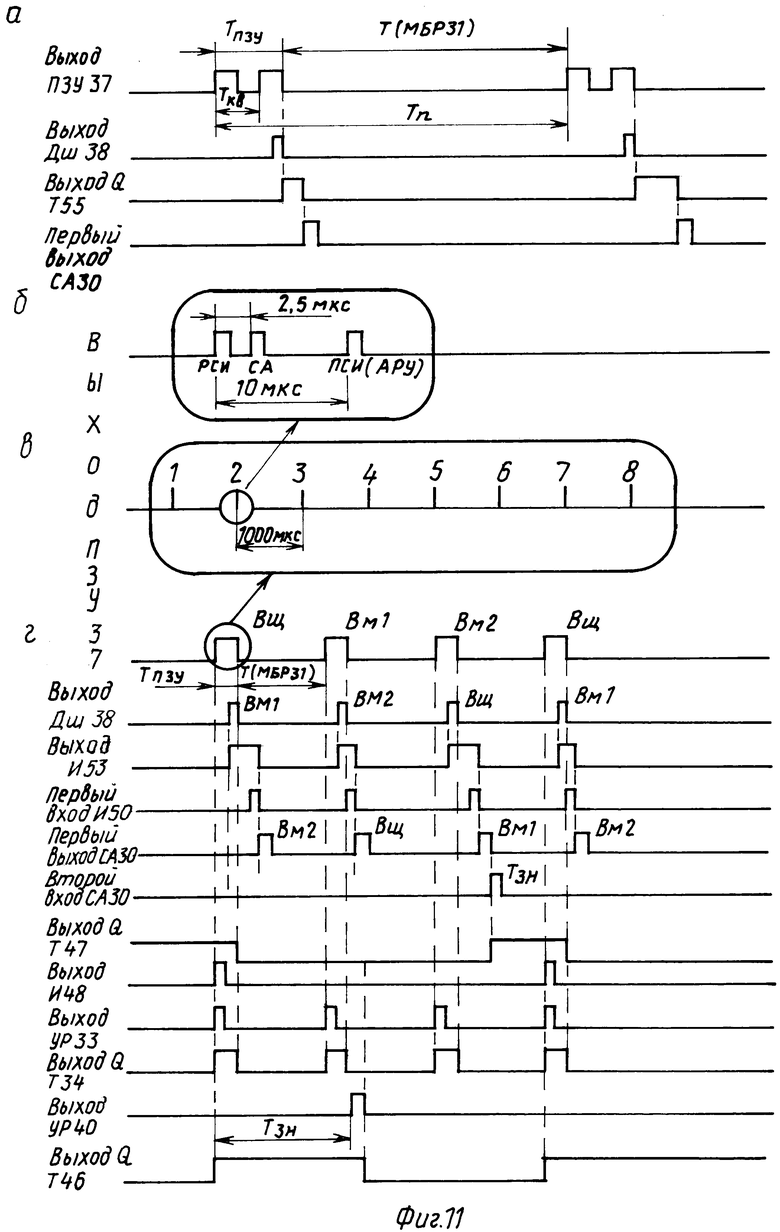
С20 формирует все последовательности сигналов для квантования во времени, сигнал запуска ПРД14 и сигналы для обеспечения работы ФНТС6 (фиг.11).
В режиме поиска сигналы квантования во времени должны представлять собой пачки импульсов, следующих с интервалом поиска Тп. Каждая пачка состоит из двух квадратурных импульсов с интервалом между ними Ткв. Обычно Тп = 50-200 мкс, а Ткв = 2,5 мкс при несущей частоте сигналов системы Лоран-С 100 кГц, Для обеспечения формирования таких сигналов ЭВМ23 подает сигнал, по которому появляется импульс на пятом выходе СА30, в результате чего Т49 установлен в состояние Q (признак режима поиска). Далее ЭВМ23 приступает к опросу состояния выхода Q Т29. При завершении формирования каждой пачки импульсов поиска на выходе ДШ38 (фиг.11а) появляется сигнал. Он восстанавливает исходное состояние СЧ36, переводит в состояние Q Т34 переписывает содержимое МБР31 в БР32 и устанавливает состояние Q в Т29 через НЕ54. По состоянию Т29 ЭВМ23 формирует сигнал возбуждения первого выхода СА30, что приводит к записи в МБР31 числа Т (МБР31) = Тп - Тпзу, где последнее означает время работы ПЗУ37. Переход в состояние Q Т34 позволит ДЧ44 проводить подсчет импульсов от ОГ43. Когда коды чисел на входах УР33 окажутся равными, на его выходе появляется сигнал, возвращающий Т34 в состояние Q. При этом ДЧ44 устанавливается в исходное состояние, а через И35 сигналы от ОГ43 поступают для счета на вход СЧ36. Код числа в последнем определяет адрес ячейки, опрашиваемой в ПЗУ37, в котором записана временная диаграмма сигналов квантования во времени. Вид диаграммы (для поиска или нет) определяет сигнал от Т49, В конце формирования диаграммы появляется сигнал на выходе ДШ38 и весь процесс повторяется.
По окончании процесса поиска ЭВМ23 формирует сигнал на шестом выходе СА30, что изменяет состояние Т49 на Q. В этом случае процесс формирования сигналов квантования во времени сохраняется, но каждая пачка состоит из трех импульсов (фиг.11б, где РСИ )ПСИ) - ранний (поздний) селекторные импульсы системы разрешения многозначности фазовых отсчетов, СЛ-строб системы слежения за фазой, ПСИ совпадает со стробом системы автоматической регулировки усиления (АРУ) РПУ21). Эти пачки за время Тпзу повторяются восемь раз с интервалом 1000 мкс (фиг.11в). Интервал между этими группами пачек на выходе ПЗУ37 определяется разницей во времени прихода сигналов станций радионавигационной системы (фиг.11г). Другое отличие заключается в том, что из-за увеличения загрузки ЭВМ23 формирование временной диаграммы сигналов квантования во времени путем опроса Т29 становится невозможным. В этой связи указанная временная диаграмма формируется путем перевода ЭВМ23 не обработку прерывания от С20. С этой целью сигнал с выхода ДШ38 через НЕ54 взводит в состояние Q Т52, которое через И53 транслируется в виде сигнала требования прерывания на ЭВМ23 (фиг.11г). После завершения выполнения очередной программной микрокоманды ЭВМ23 выдает сигнал предоставления прерывания на первый вход И50 и переходит к программе обработки прерывания. Программа начинается с формирования сигнала на первом выходе СА30 и записи по нему в МБР31 интервала до начала группы пачек следующей станции, в то время как для текущей станции интервал времени до начала ее группы пачек переписан уже в БР32 сигналом от ДШ38. На фиг.11г Вщ - ведущая станция, Вм1 - первая и Вм2 - вторая ведомые станции радионавигационной системы. В этом режиме производится также формирование импульса включения ПРД4 и сигналов для обеспечения работы ФНТС6 (фиг.11г).
Следует отметить, что передача сигнала местоположения ТС возможна только после завершения самого процесса местоопределения. Поэтому в программе начального пуска ЭВМ23 предусматривается команда возбуждения сигнала на четвертом выходе СА30, что устанавливает Т42 в состояние Q и запрещает прохождение сигнала запуска ПРД4 через И41. После завершения местоопределения командой от ЭВМ23 возбуждается сигнал на третьем выходе СА30, что устанавливает Т42 в состояние Q, поэтому с этого момента становится возможным прохождение сигнала через И41. В программе прерывания по группе для Вм2 предусмотрено формирование сигнала на втором выходе СА30, по которому в МБР39 записана рассчитанная ЭВМ23 величина Тзi и переведен в состояние Q Т47. Благодаря второй операции через И48 проходит от УР33 сигнал начала группы пачек Вщ, что совместно с подачей сигнала с выхода ОГ43 на первый выход С20 обеспечивает работу ФНТС6. Сигнал с выхода И48 переводит Т46 в состояние Q, что позволяет проводить счет импульсов от ОГ43 в ДЧ45. Когда коды чисел на входах А и В УР40 сравняются, то на его выходе появится сигнал с задержкой относительно начала пачек. Вщ на величину Тзi. Этот сигнал возвращает Т46 в состояние Q, что влечет начальную установку ДЧ45. Начальная установка Т47 в состояние Q обеспечивает сигнал на его К-входе.
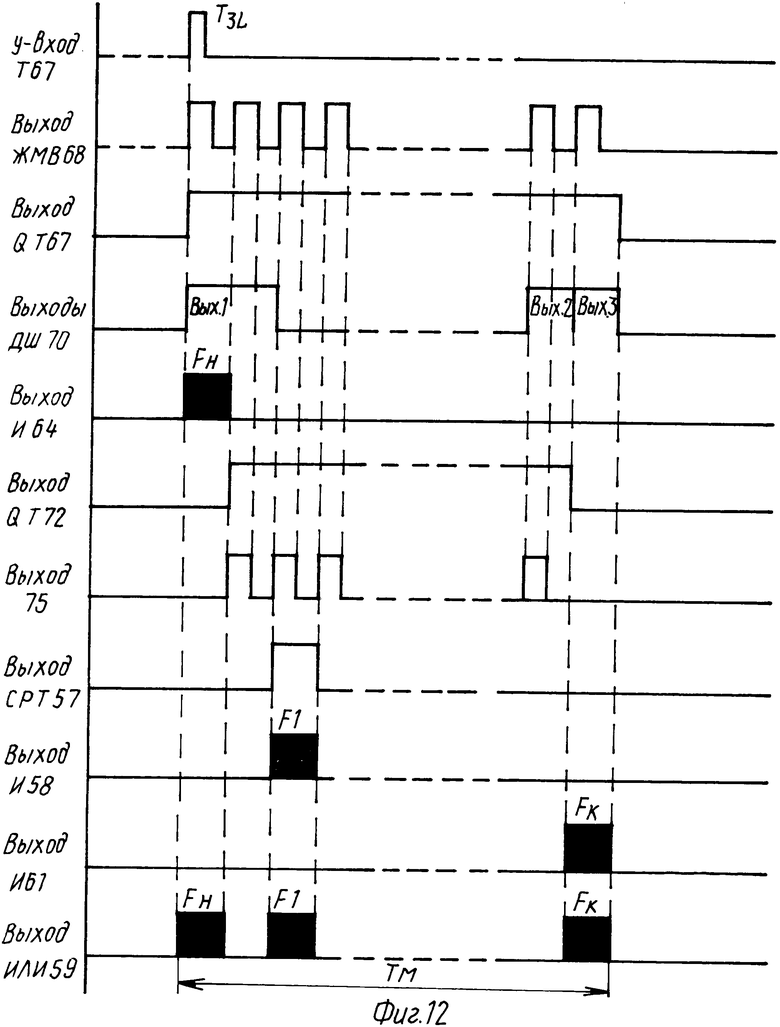
С выхода ПИ3 сигнал запуска ПРД4 поступает на I-вход Т24 (фиг.5), переводя последний в состояние Q. При этом разрешается работа КД25, который кодирует необходимым образом cигнал местоположения ТСi. Кодированный сигнал поступает для передачи на РПДУ26, а сигнал окончания кодирования поступает на К-вход Т24, восстанавливая его исходное состояние. Возможная реализация КД25 представлена на фиг. 8. Сигнал запуска ПРД4 поступает на I-вход Т67 (фиг.12), что заставляет генерировать ЖМВ68. Его сигналы подсчитывает ДЧ69, а состояние последнего дешифрирует ДШ70. Сигнал с его первого выхода проводит начальную установку Т72 через НЕ71 и разрешает прохождение сигналов Г63 с частотой Fн (сигнал начала посылки сообщения в Ц) через И 64 и ИЛИ 59 на выход КД25. По окончании сигнала на первом выходе ДШ70 начинается прохождение сдвигающих импульсов на СПГ57, куда предварительно была занесена информация о местоположении ТСi. Организован этот процесс следующим образом.
По команде ЭВМ23 возбужден второй выход СА60, что ведет к записи в МБР56 координат текущего местоположения. Затем ЭВМ23 своей командой возбуждает первый выход СА60, что через И61 обеспечивает запись информации из МБР56 и СРГ57. Последнее, конечно, возможно, если КД25 не занят кодированием предыдущей информации (Т67 находится в состоянии Q).
По сигналу с выхода И55 информация о местоположении в последовательном виде появляется на выходе СРГ57. Она проходит И58, но при этом все уровни логической "1" в ней модулируются сигналом частоты F1 от Г62. При появлении последнего разряда на выходе СРГ57 на втором выходе ДШ70 появляется сигнал, который своим спадом через НЕ73 возвращает Т72 в состояние Q, что запрещает работу И58, И55. Затем появляется сигнал на третьем выходе ДШ70, который разрешает прохождение сигналов от Г65 с частотой Fк через И 66, ИЛИ 59 на РПДУ26 (свидетельствует о конце передачи информации в Ц), возвращает в состояние Q Т67 и через НЕ74 восстанавливает состояние Q Т24 (фиг.5). На этом цикл работы КД25 заканчивается до появления следующего признака начала передачи от ПИ3.
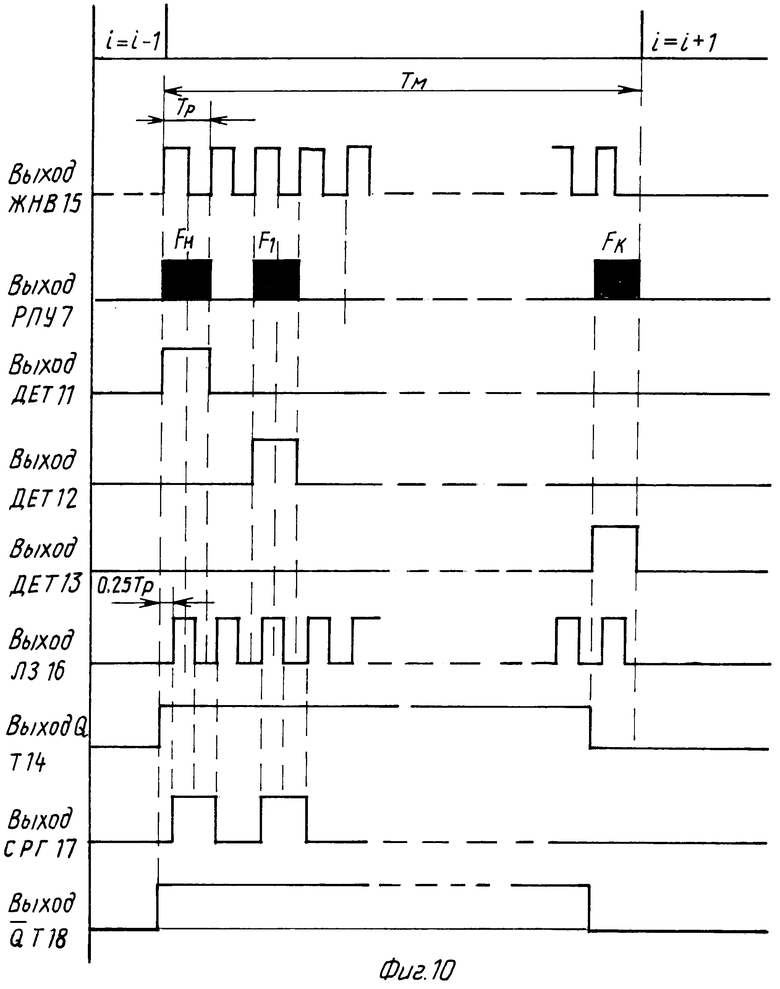
Излученный кодированный сигнал поступает в Ц на вход ПРМ1 (фиг.2). Этот сигнал фильтруется от помех в РПУ7 и поступает с выхода последнего на входы ПФ8 (настроен на Fн), ПФ9 (настроен на F1) и ПФ10 (настроен на Fк). При появлении начала сообщения появляется сигнал на выходе ДЕТ11 (фиг.10). Он переводит Т14 в состояние Q, по которому появляется сигнал на выходе ЖМВ15. Он задерживается в Л316 на половину величины длительности одного разряда передаваемого сообщения Тр. Выходной сигнал Л316 служит для занесения информации о местоположении ТС в СРГ17. Окончание этого процесса задается появлением импульса с частотой заполнения Fк, при котором появляется сигнал на выходе ДЕТ13. Этот сигнал возвращает в исходное состояние Q Т14, что одновременно в виде сигнала готовности информации поступает на ИУ2. В ИУ2 указанный сигнал поступает на первый вход ЭВМ19, которая преобразует его и сигнал номера ТСi, который поступает на ее второй вход, в вид, удобный для отображения на УО18.
Номер ТСi формируется ФНТС6 из сигналов ПИ5 (работа которого происходит аналогично ПИ3) следующим образом. Сигнал начала пачки ведущей станции с выхода И48 (фиг. 7, 11) поступает на вторые входы ДЧ27 и СЧ 38 (фиг.6) и устанавливает в исходное состояние ДЧ27, выходной сигнал которого имеет период Тм, и в состояние i = 1 СЧ28, код числа в котором меняется таким образом каждый интервал Тм. На первый вход ДЧ27 поступает сигнал ОГ43 из ПИ5. Таким образом, ПИ5 на Ц служит для создания шкалы времени с началом, которое жестко "привязано" к моменту прихода сигналов станции Вщ.
Реализация РПУ7 в ПРМ1 легко осуществляется известными методами, как и присущие им способы реализации ПФ8, 9, ДЕТ11 - 13. Для реализации ИУ2 можно использовать персональные ЭВМ со средствами отображения (например, ДВК) или ЭВМ, например, Электроника-80 и средство проектирования изображения на карту местности, Реализация РПУ21 в ПИ3 (5) также хорошо известна. ЭВМ23 удобно реализовывать на микроЭВМ (например, МС12101М). РПДУ26 также легко реализовать. В качестве ОГ43 можно использовать генератор "Гиацинт" 2.210.000 ТУ. Остальные устройства хорошо известны и могут быть реализованы на интегральных микросхемах широко распространенных серий 133,155, 1533, 589, 1806 и т.п.
Как следует из описания, система контроля местоположения ТС выгодно отличается от прототипа повышенной пропускной способностью. Действительно пусть Т3 = 0, Тм = 100 мкс, Рцтiмакс = 100 км, Со = 3 * 105 км/с, тогда время распространения сообщения между Ц и ТС составит в соответствии с выражением (1)
Tцтi= 100/3·105= 33.3·10-5(c)= 333 (мкс) а время ожидания в прототипе окажется равным
Тож = 2 * 333 + 100 = 766 (мкс).
При периоде обновления информации Т = 0,1 с число ТС, обслуживаемых прототипом, в соответствии с выражением (2), составит
Нмакс = 0,1/766 * 10 = 130.
В предлагаемой системе за счет измерения на ТС своего местоположения с помощью ПИ3 и априорных данных о положении Вщ и Ц удается определить величину Фначi. Знание номера i позволяет формировать на дополнительном выходе ПИ3 сигнал запуска ПРД4 в такой момент времени Тзi, при котором он поступает на Ц в известный момент времени относительно момента прихода на Ц сигналов Вщ. На Ц ПИ5, полностью аналогичный ПИ3, обеспечивает создание шкалы времени, начало которой определяется моментом прихода сигнала Вщ. Начиная с этого момента времени, ФНТС6 формирует номер участка протяженностью Тм, т.е. фактически (с учетом выражения (3)) номер ТСi, от котором в данный момент ожидается приход сигнала о местоположении. Тогда для предложенной системы
Нмакс = Т/Тм = 0,1/100 * 10 = 1000, что существенно превышает величину Нмакс при том же значении величины Т.
Таким образом, введение ПИ5, ФНТС6 и дополнительных связей позволяет повысить пропускную способность Ц.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОДНОЗНАЧНОГО ОПРЕДЕЛЕНИЯ ПОЛНОЙ РАЗНОСТИ ФАЗ ПРИ ИНТЕРФЕРОМЕТРИЧЕСКИХ ИЗМЕРЕНИЯХ ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ УГЛОВОЙ ОРИЕНТАЦИИ ОБЪЕКТОВ ПО СИГНАЛАМ СПУТНИКОВОЙ РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1996 |
|
RU2116655C1 |
| ПРИЕМОИНДИКАТОР РАДИОНАВИГАЦИОННОЙ СИСТЕМЫ | 1991 |
|
RU2027196C1 |
| РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1989 |
|
RU2030755C1 |
| ПРИЕМОКООРДИНАТОР | 1990 |
|
RU2065612C1 |
| БОРТОВОЕ НАВИГАЦИОННОЕ УСТРОЙСТВО | 1991 |
|
RU2027200C1 |
| СПУТНИКОВАЯ РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 1977 |
|
SU1840714A1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСОВ ПО РАДИОКАНАЛУ | 1995 |
|
RU2080646C1 |
| СИСТЕМА СИНХРОНИЗАЦИИ ЧАСОВ ПО РАДИОКАНАЛУ | 1995 |
|
RU2115946C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИФФЕРЕНЦИАЛЬНЫХ ПОПРАВОК | 1990 |
|
RU2012012C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА | 1990 |
|
RU2068569C1 |



Сущность изобретения: система контроля местоположения содержит центр управления, включающий приемник 1, индикаторное устройство 2, приемоиндикатор 5, формирователь 6 номера транспортного средства, и транспортное средство, включающее приемоиндикатор 3 и передатчик 4. 13 ил.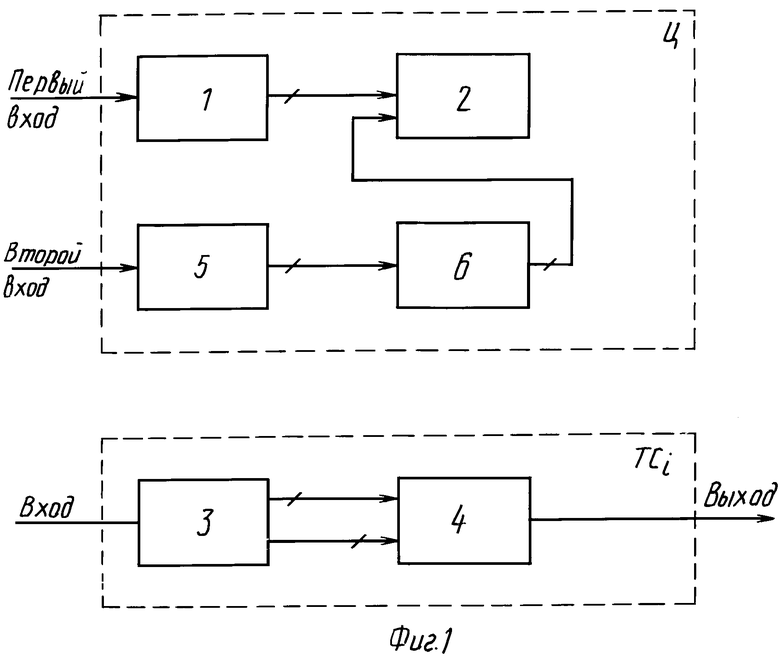
СИСТЕМА КОНТРОЛЯ МЕСТОПОЛОЖЕНИЯ ТРАНСПОРТНЫХ СРЕДСТВ, содержащая в центре управления последовательно соединенные приемник, вход которого является первым входом центра управления, и индикаторное устройство, формирователь номера транспортного средства, выход которого соединен с вторым входом индикаторного устройства, а на транспортном средстве - приемоиндикатор и передатчик с двумя входами, один из которых соединен с первым выходом приемоиндикатора, вход которого является входом аппаратуры транспортного средства, выходом которой является выход передатчика, отличающаяся тем, что, с целью повышения пропускной способности, в центр управления введен приемоиндикатор, вход которого является вторым входом центра управления, а выход соединен с входом формирователя номера транспортного средства, а на транспортном средстве второй выход приемоиндикатора соединен с вторым входом передатчика.
