Изобретение относится к радионавигации и может быть использовано для повышения безопасности судовождения в сложных метеоусловиях (ночное время суток, туман и т.д.).
Известны приемоиндикаторы радионавигационной системы (РНС) типа Лоран-С (cм. патенты США NN 3736590, 3882504, 4150380, 3947849, 4325068; заявки Великобритании NN 1285485, 1344152, 1548155, 2010626; заявки ФРГ NN 1541554, 2900882, 3330861, 3540808; заявки Франции NN 2414733, 24763245, 2589244; заявки ЕПВ NN 0082750, 0258470; заявки Японии NN 49-25636, 51-43358, 54-28078, 56-35831, 60-34073, 62-36542, 63-22274; авт.св. СССР NN 641791, 725506, 841502, 1040920, 1213864, 1167554), которые обеспечивают определение местоположения судна в гиперболических или географических координатах.
Недостатком приемоиндикаторов РНС Лоран-С являеся то, что они не обеспечивают безопасность судовождения в сложных метеусловиях. Кроме того, РНС Лоран-С имеет ограниченную (по поверхности земного шара) зону действия, вследствие чего не во всех районах земной поверхности она может быть использована для указанных выше целей.
Известны приемоиндикаторы спутниковой РНС типа Навстар (например, патенты США NN 3852750, 3971996, 4426712, 4457006, 4468793, 4472720, 4486383; заявки ЕПВ NN 0083480, 091167; заявки Великобритании NN 1595146, 2153177; заявки Франции NN 2522413, 2571161; заявка ФРГ N 3426851; заявки Японии NN 58-17269, 60-27214; авт.св. СССР N 1457599), содержащие приемную антенну, блок усиления и преобразователь сигналов, блок измерения радионавигационных параметров, блок управления и индикатор, опорный генератор, навигационный процессор. Приемоиндикаторы обеспечивают поиск, обнаружение и захват сигналов опорных передающих станций (ИСЗ), вычисление координат судна и определение вектора скорости его движения.
Недостатком приемоиндикаторов РНС Навстар является то, что они не обеспечивают безопасность судовождения в сложных метеусловиях, в частности, снижающих дальность прямой видимости.
Наиболее близким по совокупности общих существенных признаков к предлагаемому приемоиндикатору является приемоиндикатор РНС Навстар (Бортовые устройства спутниковой радионавигации. /Под ред. В.С. Шебшаевича. М.: Транспорт, 1988, с. 45-47), содержащий последовательно соединенные антенну и предварительный усилитель, первый и второй выходы которого подключены к соответствующим входам переключателя сигналов, к выходу которого подключены последовательно соединенные преобразователь, коррелятор, предварительный процессор, центральный процессор, а также формирователь сетки частот, выход которого подключен к третьему входу переключателя и вторым входам преобразователя и коррелятора. Во время движения судна приемоиндикатор осуществляет поиск и обнаружение сигнала опорных радиомаяков (навигационных ИСЗ), захват этих сигналов, измерение их частотно-временных параметров, выделение передаваемых по радиолинии цифровой информации и решение навигационной задачи - определение географических координат и вектора скорости движения судна.
Недостатком работы приемоиндикатора является то, что он не обеспечивает безопасности судовождения в сложных метеусловиях, например, снижающих дальность прямой видимости.
Целью изобретения является повышение точности определения местоположения.
Цель достигается тем, что в приемоиндикатор РНС, содержащий последовательно соединенные антенну и предварительный усилитель, первый и второй выходы которого подключены к соответствующим входам переключателя сигналов, к выходу которого подключены последовательно соединенные преобразователь, коррелятор, предварительный процессор, центральный процессор, а также формирователь сетки частот, выход которого подключен к третьему входу переключателя и вторым входам преобразователя и коррелятора, введены блок определения пути торможения, блок формирования радиуса опасности, пороговый элемент, блок хранения координат точек опасности, блок определения расстояния, промежуточное запоминающее устройство, блок определения ближайшей точки опасности, триггер, элемент И, блок определения траверса, блок команд управления, элемент ИЛИ, дешифратор, два счетчика, при этом первый (скоростной) выход центрального процессора подключен к первому входу блока определения пути торможения, выход которого подключен к первым входам блока формирования радиуса опасности и блока команд управления, второй вход которого, объединенный с первым входом порогового элемента, подключен к первому (информационному) выходу блока определения ближайшей точки опасности, к которому подключены также первый вход блока определения траверса и вход триггера, выход которого через элемент И подключен к второму входу блока определения траверса, выход которого подключен к третьему входу блока команд управления, второй вход порогового элемента подключен к выходу блока формирования радиуса опасности, первый вход блока определения расстояния и третий вход блока определения траверса объединены и подключены к второму (координатному) выходу центрального процессора, второй вход блока определения расстояния и второй вход элемента И объединены и подключены к выходу блока хранения координат точек опасности, выход блока определения расстояния подключен к первому входу промежуточного запоминающего устройства, выходом подключенного к первому входу блока определения ближайшей точки опасности, второй (сигнальный) выход которого через дешифратор подключен к первому входу элемента ИЛИ, выходом подключенного к первому входу блока хранения координат точек опасности, выход триггера подключен к первому входу первого счетчика, выходом подключенного к второму входу элемента ИЛИ, второй вход промежуточного запоминающего устройства подключен к выходу второго счетчика, вход второго счетчика, вторые входы блока определения пути торможения, блока формирования радиуса опасности, блока определения ближайшей точки опасности, первого счетчика, третий вход блока определения расстояния, четвертый вход блока определения траверса объединены и подключены к выходу формирователя частот, третий вход блока определения пути торможения и второй вход блока хранения координат точек опасности являются соответственно входом ввода варианта загрузки судна и входом ввода координат точек опасности приемоиндикатора РНС, а выходы порогового элемента, блока команд управления, блока определения траверса, блока определения ближайшей точки опасности и блока хранения координат точек опасности являются соответственно выходом сигнала нахождения судна в зоне опасности, выходом вида движения судна, выходом величины траверса на точку опасности, выходом расстояния до точки опасности и выходом координат точки опасности приемоиндикатора РНС.
Сущность предлагаемого технического решения заключается в том, что перед рейсом определяются координаты точек опасности (малые глубины, банки, молы, боны и т.д.), расположенные в районе плавания судна, которые вводятся в блок хранения координат точек опасности. В процессе плавания в заданном районе или следования по трассе в устройстве автоматически вычисляется ближайшая точка опасности и вхождения судна в зону опасности, величина пути торможения судна с учетом его загрузки и скорости движения, определяется расстояние до точки опасности и ее траверса и в зависимости от расстояния до точки опасности и величины траверса вырабатывается команда, которую можно использовать для изменения скорости движения судна и изменения курса его движения.
Указанный положительный эффект достигается с помощью признаков, не обнаруженных в известных источниках информации, что свидетельствует о соответствии предложенного технического решения критерию "существенные отличия".
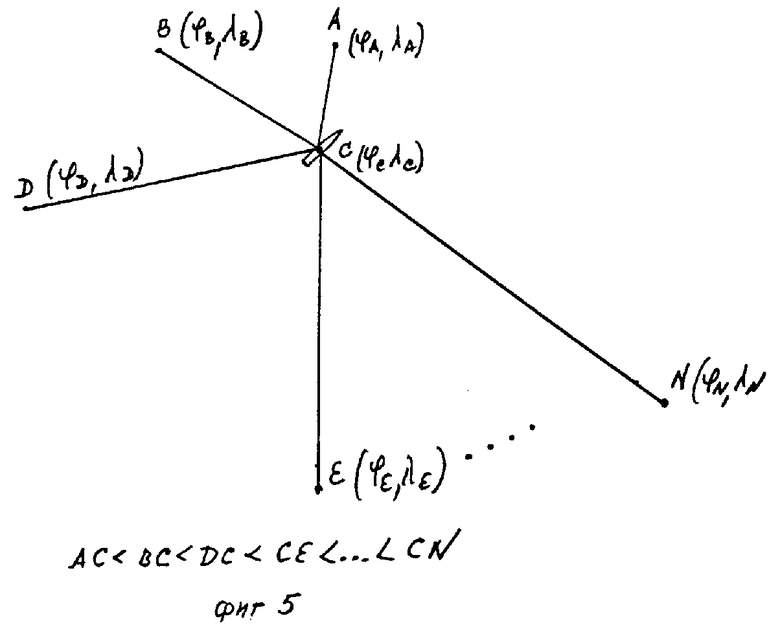
На фиг.1 приведена структурная схема предлагаемого приемоиндикатора РНС; на фиг.2 - структурная схема блока определения пути торможения; на фиг.3 - структурная схема блока определения расстояния; на фиг.4 - структурная схема блока определения ближайшей точки опасности; на фиг.5 показано движение судна, где точка С - местонахождение судна; А, B, D, Е - точки опасности; на фиг.6 приведена структурная схема блока определения траверса; на фиг.7 - схема трассы движения судна; на фиг.8 - структурная схема субблока определения путевого угла; на фиг.9 представлен решаемый треугольник на сфере; на фиг.10 представлена структурная схема блока определения пеленга; на фиг. 11 - структурная схема блока команд управления.
Предлагаемый приемоиндикатор РНС содержит последовательно соединенные антенну 1 и предварительный усилитель 2, первый и второй выходы которого подключены к соответствующим входам переключателя 3 сигналов, к выходу которого подключены последовательно соединенные преобразователь 4, коррелятор 5, процессор 6 и процессор 7, а также формирователь 8 сигналов сетки частот, выход которого подключен к третьему входу переключателя 3, к вторым входам преобразователя 4 и коррелятора 5. Первый ("скоростной") выход процессора 7 подключен к первому входу блока 9 определения пути торможения, выход которого подключен к первым входам блока 10 формирования радиуса опасности и блока 11 команд управления. Второй вход последнего, объединенный с первым входом порогового элемента 12, подключен к первому (информационному) выходу блока 13 определения ближайшей точки опасности, к которому подключены также первый вход блока 14 определения траверса и вход триггера 15. Выход триггера подключен к первому входу элемента И 16, выход которого подключен к второму входу блока 14 определения траверса, выход которого подключен к третьему входу блока 11 команд управления. Второй вход порогового элемента 12 подключен к выходу блока 10 формирования радиуса опасности. Первый вход блока 17 определения расстояния и третий вход блока 14 определения траверса объединены и подключены к второму (координатному) выходу процессора 7, второй вход блока 17 определения расстояния и второй вход элемента И 16 объединены и подключены к выходу блока 18 хранения координат точек опасности. Выход блока 17 определения расстояния подключен к первому входу промежуточного запоминающего устройства 19, выходом подключенного к первому входу блока 13 определения ближайшей точки опасности, второй (сигнальный) выход которого через дешифратор 20 подключен к первому входу элемента ИЛИ 21, выходом подключенного к первому входу блока 18 хранения координат точек опасности. Выход триггера 15 подключен также к первому входу первого счетчика 22, выходом подключенного к второму входу элемента ИЛИ 21. Второй вход промежуточного запоминающего устройства 19 подключен к выходу второго счетчика 23. Первый вход второго счетчика 23, вторые входы блока 9 определения пути торможения, блока 10 формирования радиуса опасности, блока 13 определения ближайшей точки опасности, первого счетчика 22, третий вход блока 17 определения расстояния, четвертый вход блока 14 определения траверса объединены и подключены к выходу формирователя 8 сигналов сетки частот. Третий вход блока 9 определения пути торможения и второй вход блока 18 хранения координат точек опасности являются соответственно входом ввода варианта загрузки судна и входа ввода координат точек опасности приемоиндикатора РНС, а выходы порогового элемента 12, блока 11 команд управления, блока 14 определения траверса, блока 13 определения ближайшей точки опасности и блока 18 хранения координат точек опасности являются соответственно выходом сигнала нахождения судна в зоне опасности, выходом вида движения судна, выходом величины траверса на точку опасности, выходом расстояния до точки опасности и выходом координат точки опасности приемоиндикатора РНС.
Антенна 1 предназначена для приема сигналов L1 и L2 РНС Навстар. Предварительный усилитель 2 предназначен для понижения относительного уровня наводок на сигнальный кабель и обеспечения на входе преобразователя 4 сигнала достаточной величины. Избирательные цепи предварительного усилителя имеют полосу частот, равную диапазону частот принимаемого сигнала. Предварительный усилитель включает последовательно соединенные полосовой фильтр, режекторный фильтр и усилитель радиосигналов. Режекторный фильтр осуществляет подавление узкополосных помех, благодаря чему значительно снижаются требования к динамическому диапазону усилителя. Коэффициент усиления усилительного тракта (включая антенный кабель) определяется для обоих каналов по формуле
Ky = 2Uвых/Емин, где Uвых - заданное эффективное напряжение на выходе усилителя.
Переключатель 3 обеспечивает поочередное подключение сигналов L1 и L2 к преобразователю 4 частоты. Переключатель 3 управляется синхроимпульсами, поступающими с выхода формирователя 8 сетки частот и представляет собой схему электронного коммутатора, имеющего два сигнальных входа, управляющий вход и выход и содержащего два электронных ключа, выходы которых подключены на элемент ИЛИ, выход которого является выходом переключателя 3. Преобразователь 4 частоты включает перемножитель частоты и фильтр, настроенный на заданную частоту (суммарную или разностную). В качестве перемножителя применяются балансные смесители, например, на микросхеме К526СI.
Коррелятор 5 и процессор 6 представляют собой канал обработки сигналов. Коррелятор 5 предназначен для сжатия широкополосного спектра сигнала, обработки его в устройствах систем слежения за кодом сигнала и слежения за несущей частотой, обеспечивающей демодуляцию навигационного сообщения и изменения мощности сигнала, а также выдачи полученных данных в процессор 6 в цифровой форме каждую миллисекунду. Коррелятор 5 является разновидностью оптимального фильтра первого типа и включает перемножитель сигнала на его копию, генератор копии и интегратор. Коррелятор реализует формулу
R(t) = 
 X(t) Z(t) dt где Х(t) - сигнал на входе коррелятора (выход преобразователя 4);
X(t) Z(t) dt где Х(t) - сигнал на входе коррелятора (выход преобразователя 4);
Z(t) - опорный сигнал (копия принимаемого сигнала) с выхода формирователя 8 сетки частот.
Процессор 6 осуществляет обработку полученных данных. В его функции входят обнаружение сигнала, цифровое фазовое детектирование, выработка сигналов ошибки слежения за кодом и несущей частотой. Процессор 6 каждые 20 мс выдает блок данных в процессор 7, который обеспечивает выработку управляющих сигналов, решение навигационной задачи, т. е. определение координат местоположения судна и вектор скорости его движения. Математическое обеспечение аппаратуры потребителей спутниковых РНС распадается на две части: первичную и вторичную обработку информации. Первичная обработка решает задачи поиска и обнаружения сигналов, слежения за ними, измерения навигационных параметров, приема и декодирования служебной информации. Первичная обработка информации осуществляется в процессоре 6. Вторичная обработка предназначена для решения навигационно-временной задачи, т.е. определения координат и составляющих вектора скорости потребителя, а также поправок к шкале времени и частоты, создаваемых его бортовым генератором. Вторичная обработка осуществляется в процессоре 7.
Формирователь 8 сигналов сетки частот создает серию синхроимпульсов, обеспечивающих заданную последовательность работы приемоиндикатора. Он содержит последовательно соединенные опорный генератор синусоидальных сигналов, компаратор и делитель частоты. Опорный генератор формирует синусоидальное напряжение частоты 5 МГц, которое с его выхода поступает на вход компаратора, в котором преобразуется в сигнал вида меандр. Из него в делителе частоты формируются необходимые для обеспечения работоспособности устройства синхроимпульсы. В качестве генератора опорного напряжения может быть использован серийно выпускаемый генератор типа Гиацинт. В качестве компаратора может быть использована микросхема типа 597САI.
Указанные блоки используются в серийно выпускаемых приемоиндикаторах РНС типа Навстар, например, в изделиях GPS Navigator KGP-900 фирмы KOДЕN, Япония; ХR4 GPS Receiver фирмы Navstar, США.
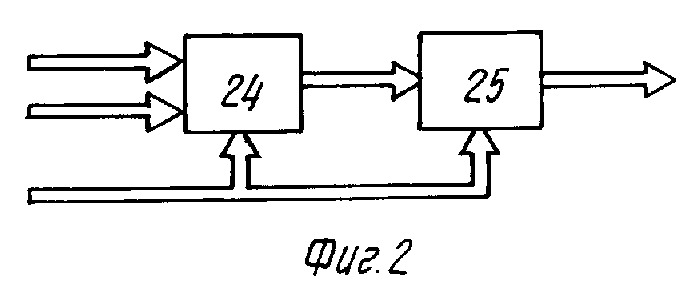
Блок 9 определения пути торможения (фиг.2) содержит последовательно соединенные субблок 24 дешифраторов и субблок 25 памяти, выход которого является выходом блока 9. Первым (скоростным) входом блока 9 является первый вход субблока 24 дешифраторов, вторым (синхронизирующим) входом блока 9 являются объединенные вторые входы субблока 24 дешифраторов и субблока 25 памяти, а третьим входом (входом ввода варианта загрузки судна) блока 9 является третий вход субблока 24 дешифраторов.
Известно, что на каждом судне имеется информация капитану о маневренных элементах судна, где в виде номограмм содержатся сведения о величине тормозного пути судна для различных вариантов его загрузки и скорости движения, полученные экспериментальным путем:
Sтп = f (Qi, Vi), где Qi - вариант загрузки судна;
Vi - скорость движения судна относительно Земли.
Можно, например, задаваться следующими значениями варианта загрузки судна:
Q1= 0, Q2 =  Qмакс, Q3 =
Qмакс, Q3 =  Qмакс, Q4 =
Qмакс, Q4 =  Qмакс, Q5= Qмакс где Qмакс - вариант максимальной загрузки судна.
Qмакс, Q5= Qмакс где Qмакс - вариант максимальной загрузки судна.
Для обозначения вариантов загрузки в двоичном коде достаточно трехразрядного числа. Можно выбрать тридцать различных значений скорости для каждого варианта загрузки, для чего достаточно в двоичном коде пятиразрядного числа. Таким образом, общий объем всей информации уместится в восьмиразрядном двоичном числе.
Работает блок 9 определения пути торможения следующим образом. Перед выходом в плавание известный вариант загрузки судна Qi вводится в блок 9 (третий вход блока 9, третий вход субблока 24 дешифраторов). На первый вход блока 9 с первого скоростного выхода процессора 7 поступает значение скорости движения судна относительно поверхности Земли (первый вход субблока 24 дешифраторов). Комбинация нулей и единиц трехразрядного числа, определяющего вариант загрузки судна, и комбинация нулей и единиц пятиразрядного числа, определяющего значение измеренной скорости, поступающие на вход субблока 24 дешифраторов, подключают его выход к той или иной ячейке памяти субблока 25 памяти, в которой записано значение тормозного пути судна, соответствующего снятой номограмме.
Блок 18 хранения координат точек опасности и промежуточное запоминающее устройство 19 содержат аналогично описанному выше блоку 9 определения пути торможения субблок дешифраторов и субблок памяти. В блоке 18 хранения координат точек опасности до плавания записываются все возможные точки опасности, расположенные в зоне плавания и на трассе следования судна. В промежуточном запоминающем устройстве 19 записываются все просчитанные дальности от судна до выбранных точек опасности.
Блок 10 формирования радиуса опасности представляет собой сумматор, первый вход которого имеет обнуленный младший разряд, чем достигается удвоение входной величины за счет сдвига двоичного числа на один разряд в сторону старших разрядов, второй вход которого имеет фиксированный код, равный числу 0,8, путем соответствующей распайки входных шин разрядов двоичного числа.
Блок 17 определения расстояния (фиг.3) решает задачу определения расстояния из выражения
сosS=sinϕ1 sinϕ2+cosϕ1cosϕ2cos(λ2-λ1).
Это выражение представляет собой определение длины ортодромии, т.е. линии, соединяющей на сфере две точки. Движение судна осуществляется, как правило, по ортодромии. В этой формуле ϕ1, λ1, ϕ2, λ2 - координаты начала и конца ортодромии. Если под координатами ϕ1, λ1 понимать координаты местоположения судна ϕc, λc а под координатами ϕ2, λ2 - координаты заданной точки ϕi, λi, то длина ортодромии определяется из выражения сosS=sinϕc sinϕi+cosϕccosϕicos(λi-λc).
Используя это выражение, можно построить блок расчета дальностей с использованием определения ортодромического расстояния судна до заданной точки.
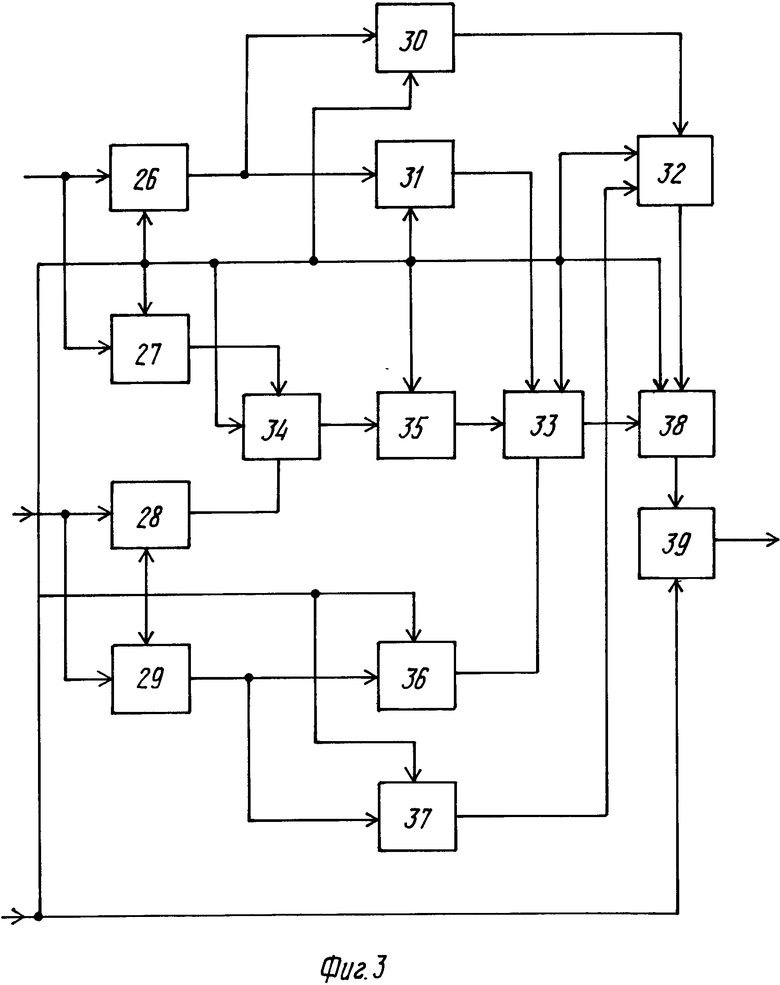
Блок 17 определения расстояния содержит первый 26, второй 27, третий 28 и четвертый 29 регистры для записи соответственно значений ϕc, λc, λiиϕi, субблок 30 вычисления sinϕc, cубблок 31 вычисления сosϕc, первый умножитель 32 значений sinϕcsinϕi, второй умножитeль 33 значений cosϕc cosϕi cos(λi-λc), вычитатель 34 значений λi-λc, субблок 35 вычисления cos (λi-λc) , субблок 36 вычисления cos ϕi, субблок 37 вычисления sin ϕi, cумматор 38, субблок 39 вычисления arccos Х. Выход первого регистра 26 подключен к первым входам субблоков 30, 31 вычисления sinϕc, cosϕc, выходы которых подключены соответственно к первым входам первого 32 и второго 33 умножителей. Выходы второго 27 и третьего 28 регистров подключены соответственно к первому и второму входам вычитания 34, выход которого подключен к первому входу субблока 35 вычисления значения cos (λi-λc), выход которого подключен к второму входу второго умножителя 33. Выход четвертого регистра 29 подключен к первым входам субблоков 36, 37 вычисления значений соответственно cos ϕi<N> и sinϕi, при этом выход субблока 36 вычисления значений сos ϕiподключен к третьему входу второго умножителя 33, а выход субблока 37 вычисления значения sin ϕi подключен к второму входу первого умножителя 32. Выходы первого 32 и второго 33 умножителей подключены соответственно к первому и второму входам сумматора 38, выход которого подключен к первому входу субблока 39 вычисления значения arccos Х, при этом вторые входы первого 26, второго 27, третьего 28 и четвертого 29 регистров субблоков 30, 31, 35, 36, 37, 39 вычисления значений соответственно sinϕc, cosϕc, cos (λi-λc, ) , cos ϕi, sin ϕi, arccos Х, третьи входы первого умножителя 32, вычитателя 34, сумматора 38, четвертый вход второго умножителя 33 объединены и являются синхронизирующим (третьим) входом блока расчета дальности, первые входы первого 26 и второго 27 регистров объединены и являются сигнальным (первым) входом блока определения расстояния, первые входы третьего 28 и четвертого 29 регистров объединены и являются входом координат точки опасности блокa определения расстояния (вторым входом блока 17), выходом которого является выход субблока 39 вычисления значения arccos Х.
Работает блок 17 определения расстояния следующим образом. На его сигнальный вход - первые входы регистров 26, 27 - с координатного выхода процессора 7 поступают текущие значения координат местоположения судна ϕc, λc (в регистр 26 поступают значения широты ϕc, в регистр 27 - значения долготы λc). На вход координат точки опасности блока 17 определения расстояния (первые входы регистров 28, 29) с выхода блока 18 хранения координат точек опасности поступают географические коор- динаты точек опасности ϕi, λi (в регистр 29 поступает значение широты ϕi, в регистр 28 поступает значение долготы λi). На синхронизирующий вход блока 17 поступают синхроимпульсы, формирующие его диаграмму работы по времени. С выхода первого регистра 26 значение широты ϕcместоположения судна поступает на первые входы субблоков 30 и 31 вычисления значений sinϕc и сos ϕc. Вычисленные значения sin ϕc и сos ϕc c выходов субблоков 30, 31 поступают соответственно на первые входы первого 32 и второго 33 умножителей. С выходов второго 27 и третьего 28 регистров значения долготы λc текущего местоположения судна и значения долготы λi точки опасности поступают соответственно на первый и второй входы вычитателя 34, с выхода которого вычисленное значение разности λi-λc поступает на вход субблока 35 вычисления значения сos (λi-λc), c выхода которого вычисленное значение сos (λi-λc) поступает на второй вход второго умножителя 33. С выхода четвертого регистра 29 значение широты ϕi точки опасности поступает на первые входы субблоков 36 и 37 вычисления значений сos ϕi и sin ϕi, c выходов которых вычисленные значения сos ϕi и sinϕi поступают соответственно на третий вход второго умножителя 33 и второй вход первого умножителя 32. С выхода первого умножителя 32 вычисленное значение произведения sinϕc sinϕi поступает на первый вход сумматора 38, на второй вход которого с выхода второго умножителя 33 поступает значение произведения сosϕc cos ϕi cos (λi-λc). C выхода сумматора 38 вычисленное значение
sinϕc sinϕi +cosϕc cosϕi cos (λi-λc) = Х поступает на первый вхoд субблока 39 вычисления значения arccos Х, представляющее собой ортодромическое расстояние от местоположения судна с координатами ϕc, λc до точки опасности с координатами ϕi, λi, которое с его выхода поступает на первый вход промежуточного запоминающего устройства 19.
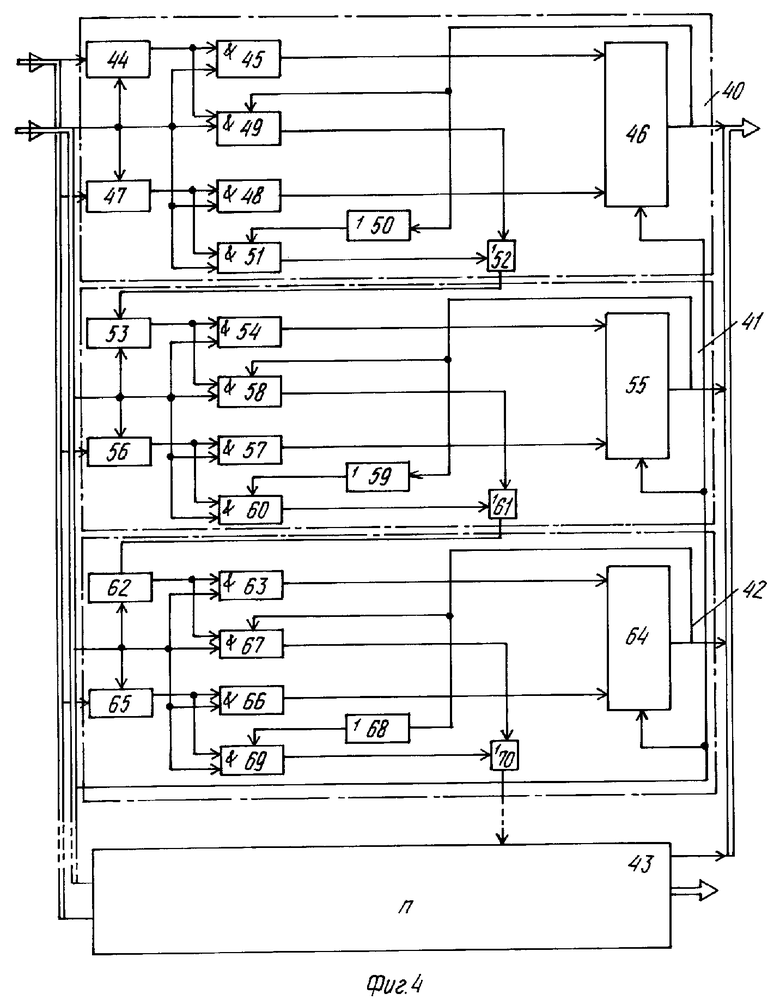
Блок 13 определения ближайшей точки опасности содержит n одинаковых последовательно включенных субблоков. Вариант блока 13 для n = 4 представлен на фиг.4. Блок 13 содержит последовательно соединенные субблоки 40, 41, 42, 43 определения разности двух дальностей. Субблок 40 содержит последовательно соединенные регистр 44, элемент И 45 и вычитатель 46, второй вход которого подключен к выходу регистра 47 через элемент И 48. Субблок 40 содержит также элемент И 49, подключенный первым входом к выходу регистра 44, а вторым к выходу вычитателя 46, элемент НЕ 50, подключенный входом к выходу вычитателя 46, элемент И 51, подключенный первым входом к выходу регистра 47, вторым к выходу элемента НЕ 50, а выходом к первому входу элемента ИЛИ 52, второй вход которого подключен к выходу элемента И 49. Первый вход регистра 44 является первым входом субблока 40, первый вход регистрa 47 является вторым входом субблока, выход вычитателя 46 является сигнальным выходом субблока, выход элемента ИЛИ 52 является информационным выходом субблока 40, подключенным к первому входу субблока 41. Соединенные между собой вторые входы регистров 44, 47, вторые входы элементов И 45, 48, третьи входы элементов И 49, 51 и вычитателя 46 образуют тактовый вход субблока 40. Аналогично выполнены субблок 41, который содержит регистр 53, элемент И 54, вычитатель 55, регистр 56, элементы И 57, 58, элемент НЕ 59, элемент И 60, элемент ИЛИ 61, субблок 42, который содержит регистр 62, элемент И 63, вычитатель 64, регистр 65, элементы И 66, 67, элемент НЕ 68, элемент И 69, элемент ИЛИ 70, а также субблок 43, аналогичная схема которого на фиг.4 не показана. Информационный выход последнего субблока (субблока 43) является информационным выходом блока 13, сигнальные выходы субблоков 40, 41, 42, 43 образуют сигнальный выход блока 13, вторые входы субблоков 40, 41, 42, 43 и первый вход субблока 40 являются первым входом блока 13, вторым входом которого являются соединенные между собой тактовые входы субблоков 40, 41, 42, 43.
Работает блок 13 следующим образом. На первый вход блока 13 (первый вход регистра 44 субблока 40) с выхода промежуточного устройства 19 поступает рассчитанное значение дальности АС (фиг.5), которое через элемент И 45 поступает на первый вход вычитателя 46. На первый вход регистра 47 поступает расчетное значение дальности ВС, которое через элемент И 48 поступает на второй вход вычитателя 46. В вычитателе 46 формируется разность АС - ВС, причем если АС < ВС - на выходе вычитателя 46 возникает сигнал "1", и "0", если АС > ВС, который с выхода вычитателя 46 поступает на вход элемента И 49 и через элемент НЕ 50 на вход элемента И 51. На вторые входы регистров 44, 47, элементов И 45, 49, 48, 51 (второй вход блока 13) поступают с выхода формирователя 8 сетки частот синхроимпульсы. Если АС < ВС, то сигнал с выхода вычитателя 46, равный "+1", поступает на третий вход элемента И 49 и с его выхода значение дальности АС поступает на первый вход элемента ИЛИ 52. На выходе элемента И 51 сигнала нет, так как на втором входе элемента И 51 сигнал, равный "0". С выхода элемента ИЛИ 52 сигнал, пропорциональный дальности АС, поступает на первый вход регистра 53 (первый вход субблока 41), на второй вход которого (первый вход регистра 56) с выхода промежуточного запоминающего устройства 19 поступает значение дальности СD. Субблок 41 работает аналогично, и, так как АС < CD, на его выходе (выходе элемента ИЛИ 61) появляется сигнал, пропорциональный расстоянию АС, который поступает на первый вход субблока 42 (первый вход регистра 62), на второй вход которого (первый вход регистра 65) поступает значение дальности СЕ. На информационном выходе субблока 42 (выходе элемента ИЛИ 70) появляется сигнал, пропорциональный дальности АС, так как АС < CЕ. При количестве субблоков и точек приземления n = 4 на информационном выходе n-го cубблока 43 определения разности двух дальностей появляется значение наименьшего расстояния. Выходы вычитателей, входящих в субблоки 40, 41, 42, 43 определения разности двух дальностей, объединены в сигнальный выход блока 13 определения ближайшей точки опасности. Как видно из структурной схемы блока 13, на выходе вычитателей в зависимости от нахождения точек опасности и их выбранного порядка перебора формируется сигнал в виде двоичного кода с набором "1" и "0". Если, к примеру, в зоне плавания имеются пять точек опасности (фиг.5) и при заданном их переборе первая точка оказывается ближайшей, то на выходе всех вычитателей сигнал вида "1" и на сигнальном выходе блока 13 определения ближайшей точки опасности сигнал вида "1111". Если ближайшей точкой оказывается вторая точка перебора, то на сигнальном выходе блока 13 сигнал вида "0111" (на выходе вычитателя 46 субблока 40 сигнал вида "0", на выходах вычитателей субблоков 44, 42, 43 сигнал вида "1") и т.д.
Таким образом, на информационном выходе блока 13 (выход элемента ИЛИ последнего субблока определения разностей двух дальностей) имеют расстояние до ближайшей точки опасности, а на его сигнальном выходе (объединенные выходы вычитателей субблоков 40, 41, 42, 43) имеют код, позволяющий определить номер записанной в блоке 18 хранения координат точек опасности ближайшей точки опасности.
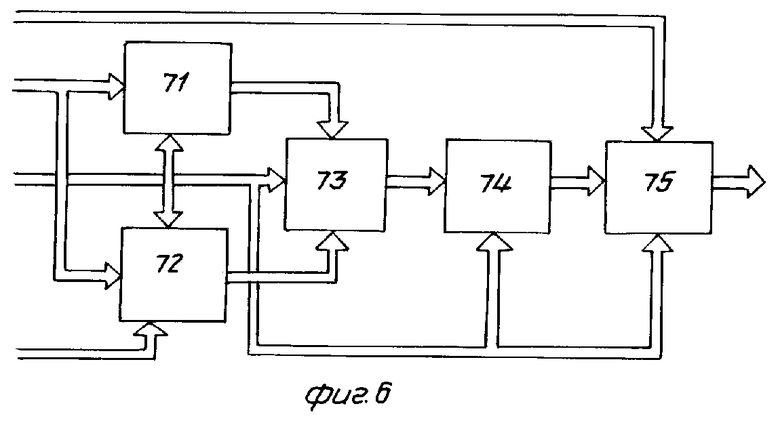
Блок 14 определения траверса (фиг.6) содержит субблок 17 определения путевого угла, субблок 72 определения пеленга, выходы которых подключены соответственно к первому и второму входам вычитателя 73. Выход последнего подключен к первому входу субблока 74 определения значения sinΔϕ, выход которого подключен к первому входу умножителя 75. Выход умножителя является выходом блока 14 определения траверса, первым входом которого является второй вход умножителя 75, вторым входом- второй вход субблока 72 определения пеленга, третьим входом - объединенные первые входы субблока 71 определения путевого угла и субблока 72 определения пеленга, а объединенные вторые входы субблока 71 определения путевого угла и субблока 74 определения значения sinΔϕ, третьи входы субблока 72 определения пеленга, вычитателя 73 и умножителя 75 являются четвертым (синхронизирующим) входом блока 14 определения траверса.
Работает блок 14 определения траверса следующим образом. На первые входы субблока 71 определения путевого угла и субблока 72 определения пеленга (третий вход блока 14 определения траверса) с координатного выхода процессора 7 поступает текущее значение координат местоположения судна - широта ϕc и долготa λc. На второй вход субблока 72 определения пеленга (второй вход блока 14 определения траверса) поступает значение координат местоположения точки опасности - широта ϕi и долгота λiчерез элемент И 16. В субблоке 71 определения путевого угла блока 14 определяется величина путевого угла (ПУ) из выражения
ПУ = arctg  где Δϕ - приращение широты в единицу времени;
где Δϕ - приращение широты в единицу времени;
Δλ- приращение долготы в единицу времени.
Путевой угол - это угол между направлением меридиана на север и линией пути судна (фиг.7).
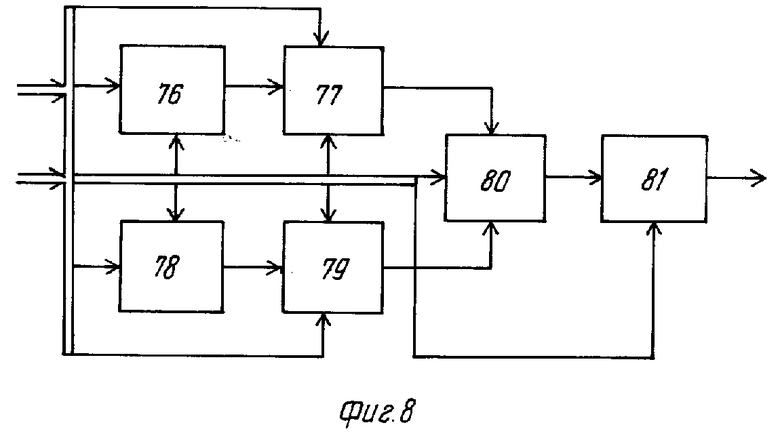
Субблок 71 определения путевого угла (фиг.8) содержит первый элемент 76 задержки, первый сумматор 77, второй элемент 78 задержки, второй сумматор 79, делитель 80 и вычислитель 81 значения arctg Х. Выход первого элемента 76 задержки подключен к первому входу первого сумматора 77, выход второго элемента 78 задержки подключен к первому входу второго сумматорa 79. Выходы первого и второго сумматоров 77, 79 подключены соответственно к первому и второму входам делителя 80, выход которого подключен к первому входу вычислителя 81 значений arctg Х, выход которого является выходом субблока 71. Первые входы первого 76 и второго 78 элементов задержки, а также вторые входы первого 77 и второго 79 сумматоров объединены и представляют собой первый вход субблока 71 определения путевого угла, объединенные вторые входы элементов 76, 78 задержки, вычислителя 81 значений arctg Х, третьи входы первого 77 и второго 79 сумматоров делителя 80 объединены и представляют собой второй (синхронизирующий) вход субблока 71 определения путевого угла.
Работает субблок 71 следующим образом. На первый вход субблока 71 (первые входы элементов 76, 78 задержки и вторые входы сумматоров 77, 79) поступают соответственно с выхода процессора 7 текущие значения долготы λc и широты ϕc местоположения судна, а на его второй вход с выхода формирователя 8 сигналов сетки частот поступают синхронизирующие его работу импульсы с периодом следования Т = 0,1 c, поступающие на вторые входы элементов 76, 78 задержки, третьи входы сумматоров 77, 79, делителя 80 и второй вход вычислителя 81 arctg Х. При этом на первый вход первого элемента 76 задержки и второй вход первого сумматора 77 поступает текущее значение широты ϕ k+1, а на первый вход второго элемента 78 задержки и второй вход второго сумматора 79 поступает текущее значение долготы λ k+1. На первые входы сумматоров 77, 79 поступают задержанные на один такт (Т = 1c) предшествующие значения ϕkиλk. На выходе сумматоров 77, 79 образуются разности ΔϕkиΔλk . Поскольку интервал между соседними отсчетами 1с, эти разности характеризуют изменение широты и долготы за 1с. С выхода сумматоров 77, 79 значения Δϕk, Δλk поступают на делитель 80, в котором вычисляется отношение Δϕk/Δλk=X, поступающее с его выхода на вычислитель 81 arctg Х, что представляет собой значение путевого угла движения судна. Вычисление значения arctg Х может быть выполнено методом "цифра за цифрой".
Элементы 76, 78 задержки могут быть выполнены на БИС серии 1802ИP1, сумматоры 77, 79 могут быть выполнены на БИС AУ cерии 1802ВC1. В качестве делителя 80 может использоваться микросхема 1802ВP2.
В субблоке 72 определения пеленга блока 14 определяется значение величины пеленга судна на точку опасности как угол на сфере, заключенный между северным направлением меридиана и направлением на точку опасности. Расчет пеленга осуществляется методом сферического треугольника. На фиг.9 представлен сферический треугольник CDЕ, где пеленг DCЕ образован линиями DC и СЕ. При этом точка С определяется текущими географическими координатами судна ϕc, λc, точка D - координатой широты, равной 90o, и координатой долготы текущего местонахождения судна, координаты точки опасности Е задаются заранее. Так как известны координаты сторон сферического треугольника СDЕ, то значение пеленга может быть определено из теоремы синусов: =
= 
Для удобства вывода соотношения величин углов и сторон треугольника CDЕ рассматривают на сфере. Угол CDЕ=λc-λE известен, ϕD = 90o, сторона DE = = R(ϕD-ϕE)= RΔϕDE, где R - радиус Земли; угол ΔϕDE в радианах. Из прямоугольного треугольника СЕF находят сторону СЕ.
cos CЕ = сos CF ˙cos ЕF, где СF = R (λC-λE)=RΔλCE;
ЕF = R (ϕC-λE)=RΔϕCE;
СЕ = arccos (cos R ΔλCE˙cosRΔϕCE).
Субблок 72 определения пеленга блока 14 (фиг.10) содержит первый 82, второй 83, третий 84, четвертый 85, пятый 86 регистры, первый вычитатель 87, первый умножитель 88, первый субблок 89 вычисления косинуса, второй умножитель 90, второй вычитатель 91, третий умножитель 92, второй субблок 93 вычисления косинуса, субблок 94 вычисления арккосинуса, первый субблок 95 вычисления синуса, делитель 96, третий вычитатель 97, четвертый умножитель 98, второй субблок 99 вычисления синуса, пятый умножитель 100, третий субблок 101 вычисления синуса, субблок 102 вычисления арксинуса. Выход первого регистра 82 подключен к первому входу первого вычитателя 87, выход которого подключен к первому входу первого умножителя 88. Выход умножителя 88 подключен к первому входу субблока 89 расчета косинуса, выход которого подключен к первому входу второго умножителя 90. Выход второго регистра 83 подключен к первому входу второго вычитателя 91, выход которого подключен к первому входу третьего умножителя 92. Выход умножителя 92 подключен к первому входу субблока 93 вычисления косинуса, выход которого подключен к второму входу второго умножителя 90. Выход умножителя 90 подключен к первому входу субблока 94 вычисления арккосинуса, выход которого подключен к первому входу субблока 95 вычисления синуса. Выход последнего подключен к первому входу делителя 96, выход которого подключен к первому входу субблока 102 вычисления арксинуса, выход которого является выходом субблока 72 определения пеленга. Выход третьего регистра 84 подключен к второму входу первого вычитателя 87 и первому входу третьего вычитателя 97, второй вход которого подключен к выходу пятого регистра 86. Выход третьего вычитателя 97 подключен к первому входу четвертого умножителя 98, выход которого подключен к первому входу субблока 99 вычисления синуса. Выход субблока 99 подключен к первому входу пятого умножителя 100, выход которого подключен к второму входу делителя 96, а его второй вход подключен к выходу субблока 101 вычисления синуса, второй вход которого подключен к выходу второго вычитателя 91. Выход четвертого регистра 85 подключен к второму входу второго вычитателя 91. Первые входы первого 82 и второго 83 регистров объединены и представляют собой первый вход субблока 72 определения пеленга, первые входы третьего 84, четвертого 85 и пятого 86 регистров объединены и являются его вторым входом, а объединенные вторые входы первого 82, второго 83, третьего 84, четвертого 85, пятого 86 регистров, первого 88, третьего 92, четвертого 98 умножителей, субблоков 89, 93 вычисления косинуса, субблока 94 вычисления арккосинуса, субблоков 95, 99, 101 вычисления синуса, субблока 102 вычисления арккосинуса, третьи входы вычитателей 87, 91, 97, второго 90 и пятого 100 умножителей и делителя 96 объединены и представляют третий (синхронизирующий) вход блока 72 определения пеленга.
Работает блок 72 определения пеленга следующим образом. На его первый вход - первый вход регистров 82, 83 второго (координатного) выхода процессора 7 поступают текущие координаты местоположения судна - соответственно текущая долгота λc и текущая широта ϕC. На его второй вход (первые входы регистров 84, 85, 86) с выхода блока 18 хранения координат точек опасности через элемент И 16 поступают значения координат точки опасности соответственно ϕЕиλЕ, значение широты точки D - ϕD, равное 90o (фиг.9). На его третий вход с выхода формирователя 8 сигналов сетки частот поступают синхроимпульсы, обеспечивающие временную диаграмму работы субблока 72 определения пеленга. С выходов регистров 82 и 84 значения широт ϕC и ϕE поступают на первый и второй входы первого вычитателя 87 и далее на первый умножитель 88, в котором полученная разность ϕC-ϕE умножается на величину R, пропорциональную радиусу Земли. В результате на выходе умножителя 88 формируется сигнал, пропорциональный величине стороны ЕF треугольника СЕF (фиг.9), который с выхода умножителя 88 далее поступает на вход субблока 89 вычисления cos ЕF и с его выхода на первый вход второго умножителя 90. С выхода регистров 83, 85 значения долготы λС и λЕ поступают на первый и второй входы второго вычитателя 91 и далее на третий умножитель 92, в котором полученная разность λC-λE умножается на величину R, пропорциональную радиусу Земли. В результате на выходе умножителя 92 формируется сигнал, пропорциональный величине стороны СF треугольника СFЕ (фиг.9), который с выхода умножителя 92 поступает далее на вход субблока 93 вычисления cos CF и с его выхода на второй вход второго умножителя 90, с выхода которого полученное произведение cos ЕF ˙cos CF = Х поступает на вход субблока 94 вычисления арккосинуса. С выхода субблока 94 сигнал, пропорциональный значению arccos Х, поступает на вход субблока 95 вычисления значения sinCЕ. Сформированный в субблоке 95 сигнал, пропорциональный значению sin CЕ, с его выхода поступает на первый вход делителя 96, формирующий сигнал, пропорциональный значению 
C выходов регистров 84 и 86 значение широт ϕE и ϕD поступает на первый и второй входы третьего вычитателя 97, с выхода которого полученная разность ϕE-ϕD поступает на вход четвертого умножителя 98, в котором умножается на величину R, пропорциональную радиусу Земли. В результате на выходе умножителя 98 формируется сигнал, пропорциональный величине стороны DЕ cферического треугольника CDЕ (фиг.9), который с его выхода поступает на вход субблока 99 вычисления sin DЕ. С выхода субблока 99 сигнал, пропорциональный значению sin DЕ, поступает на первый вход пятого умножителя 100, на второй вход которого с выхода субблока 101 вычисления синуса поступает сигнал, пропорциональный величине sin СDЕ. На вход субблока 101 значение угла CDЕ (фиг.9) как разность двух долгот λC-λE, поступает с выхода второго вычитателя 91. С выхода пятого умножителя 100 сигнал, пропорциональный произведению sin DЕ˙sin CDЕ, поступает на второй вход делителя 96. В делителе 96 выполняется операция деления в виде = ϕ и с его выхода сигнал, пропорциональный этому частному, поступает на вход субблока 102 вычисления arcsinϕ который представляет собой пеленг судна на точку Е опасности.
= ϕ и с его выхода сигнал, пропорциональный этому частному, поступает на вход субблока 102 вычисления arcsinϕ который представляет собой пеленг судна на точку Е опасности.
Вычисление значений sin Х, arcsin Х, cos Х, arccos Х может быть выполнено методом "цифра за цифрой" на микросхемах 1802ВС1, 1802ВР2. Эти же микросхемы могут быть использованы в качестве умножителей 88, 90, 92, 98, 100. В качестве регистров 82, 83, 84, 85, 86 может быть использована микросхема 1802 ИР1. В качестве вычитателей 87, 91, 97 может быть использована микросхема 1802ВС1.
С выхода субблока 71 определения путевого угла вычисленное значение путевого угла поступает на первый вход вычитателя 73, на второй вход которого с выхода субблока 72 определения пеленга поступает вычисленное значение пеленга на ближайшую точку опасности Е. С выхода вычитателя 73 вычисленная разность Δϕ= ПУ - П поступает на субблок 74 определения значения sin Δϕ, c выхода которого вычисленное значение sin Δϕ поступает на первый вход умножителя 75, на второй вход которого поступает с выхода блока 13 определения ближайшей точки опасности вычисленное расстояние СЕ от судна до точки опасности Е.
Определение траверса d осуществляется из прямоугольного треугольника СЕК (фиг.7):
d = CЕ sin Δϕ . При этом, если П-ПУ > 0, то точка опасности расположена справа по траверсу, если П-ПУ < 0, то точка опасности расположена слева по траверсу движения судна.
Вычисленное значение величины d траверса точки опасности поступает с выхода блока 14 на третий вход блока 11 команд управления, на первый вход которого поступает с выхода блока 9 определения пути торможения значение пути торможения Sт, соответствующее варианту загрузки судна и скорости его движения, а на его второй вход с выхода блока 13 определения ближайшей точки опасности поступает величина расстояния до точки опасности.
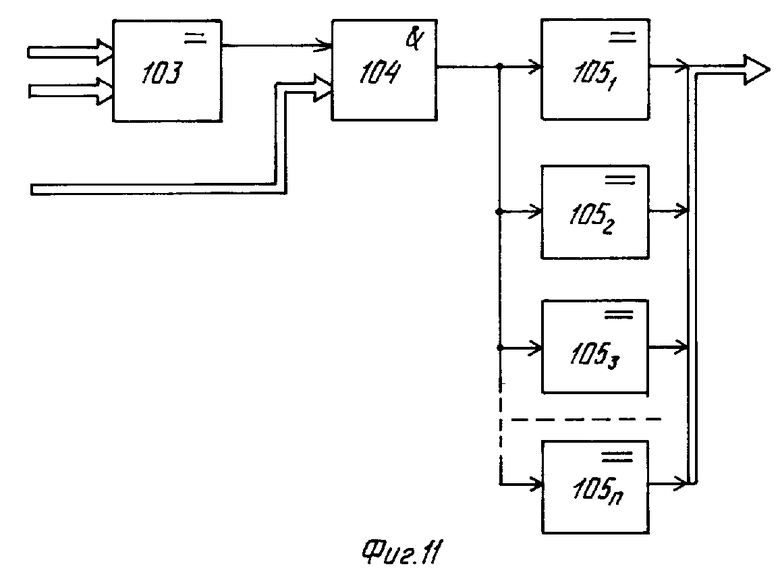
Блок 11 команд управления (фиг. 11) содержит элемент 103 сравнения, элемент И 104, n пороговых элементов 105 (1051...105n). Выход элемента 103 сравнения подключен к первому входу элемента И 104, выход которого подключен к входам пороговых элементов 1051...105n. Объединенные выходы последних являются выходом блока 11 команд управления, первым и вторым входами которого являются соответственно первый и второй входы элементов 103 сравнения, а его третьим входом - второй вход элемента И 104.
Работает блок 11 команд управления следующим образом. На первый вход (вход пути торможения) блока 11, т.е. на первый вход элемента 103 сравнения, поступает постоянно величина тормозного пути Sт судна для данного варианта загрузки и скорости его движения. На второй вход блока 11 (второй вход элемента 103) поступает значение расстояния r от судна до точки опасности Е (фиг.7). На второй вход элемента И 104 поступает значение величины траверса d на точку опасности Е. На выходе элемента И 104 значение траверса d появляется только тогда, когда на его первый вход поступает сигнал с выхода элемента 103 сравнения. Это происходит в том случае, если величина тормозного пути Sт равна расстоянию r до точки опасности. В этом случае значение величины траверса поступает на входы пороговых элементов 1051.... 105n. Каждый из этих пороговых элементов имеет фиксированный порог, соответствующий определенной величине траверса от максимально безопасного до траверса, равного нулю, т. е. когда точка опасности лежит на линии пути движения судна. Между этими крайними значениями может выбираться любое число значений траверсов, в общем случае n.
Обозначают величины порогов пороговых элементов 1051...105n через а1, а2, а3...аn, при этом а1<а2<а3...<аn (а1=0, аn=d без). Допускают, что величина траверса d равна а1 = 0. В этом случае срабатывает пороговый элемент 1051, и на его выходе появляется сигнал, равный "1", в то время как на выходе остальных пороговых элементов 1052...105n будет сигнал, равный "0". Если величина траверса d равна dбез, то срабатывают все пороговые элементы 1051...105n, и на их выходах будет сигнал, равный "1".
Таким образом, в зависимости от величины траверса на выходе блока 11 команд управления формируется сигнал в двоичном коде, имеющий различный (неповторимый) набор "1" и "0". Эти сигналы можно использовать для формирования различных команд движения судна. Например, для случая, когда d = 0, сигнал имеет вид 110203...0n и может быть использован для формирования команды "полный назад". Эту комбинацию можно использовать для формирования команды поворота судна. Для случая, когда d = dбез, на выходе блока формируется сигнал вида 121213...1n. В этом случае судно продолжает режим движения без изменений. Поскольку сформированные сигналы могут быть использованы по-разному - могут быть просто выведены на дисплей в навигационном комплексе, на автоштурман и т.д., оконечные устройства не указаны.
Ввод исходной информации в блок 9 определения пути торможения (вариант загрузки судна) и в блок 18 хранения координат точек опасности может осуществляться с помощью пульта ввода и индикации.
Работает приемоиндикатор РНС следующим образом.
Перед рейсом определяются координаты точек опасности (малые глубины, банки, боны, молы и т.д.), расположенные в районе плавания судна и представляющие опасность для судовождения, которые вводятся в блок 18 хранения координат точек опасности. Во время движения судна приемоиндикатор РНС осуществляет с помощью описанных выше блоков 1...7 поиск и обнаружение сигналов опорных радиомаяков (навигационных ИСЗ), захват этих сигналов, измерение их частотно-временных параметров, выделение передаваемой по радиолинии информации и решение навигационной задачи - определение географических координат и вектора скорости движения судна. С первого ("скоростного") выхода процессора 7 на первый вход блока 9 определения пути торможения поступает значение скорости движения судна относительно Земли, в котором сформирована номограмма зависимости величины тормозного пути данного судна для различных вариантов его загрузки и скорости движения, полученная экспериментальным путем:
Sтп = f(Qi,Vi).
Сформированная в блоке 9 величина тормозного пути судна с его выхода поступает на вход блока 10 формирования радиуса опасности, в котором определяется сумма D = 0,8 + 2Sтп, имеющая размерность в милях и представляющая собой радиус опасности судна, которая с его выхода поступает на второй вход порогового элемента 12. С второго (координатного) выхода процессора 7 на первый вход блока 17 определения расстояния и третий вход блока 14 определения траверса поступают текущие координаты местоположения судна. На второй выход блока 17 определения расстояния и второй вход элемента И 16 поочередно (в порядке ввода в блок 18) поступают координаты точек опасности, записанные в блоке 18 хранения координат точек опасности, управление которым осуществляется первым счетчиком 22 через элемент ИЛИ 21. В блоке 17 определяются расстояния от судна до точек опасности по формуле
сos ri = sinϕc sinϕi + сos ϕc сosϕi cos (λi-λc), где ri - расстояние от судна до точки опасности;
ϕc, λc - географические координаты местонахождения судна;
ϕi, λi - географические координаты точки опасности.
Вычисленные значения расстояний до точек опасности ri поступают на промежуточное запоминающее устройство 19, управление которым осуществляется вторым счетчиком 23, и с его выхода подаются на вход блока 13 определения ближайшей точки опасности, в котором определяется наименьшее расстояние из всех измеренных расстояний до точек опасности riмин, т.е. определяется ближайшая точка опасности.
При выбранных алгоритме работы и структурной схеме блока 13 определения ближайшей точки опасности (фиг.4) на выходах вычитателей субблоков 40, 41, 42, 43 в зависимости от нахождения точек опасности и выбранного порядка перебора точек опасности формируется двоичный код с набором "1" и "0". Если, к примеру, в зоне плавания имеются пять точек опасности (фиг.5) и при заданном их переборе первая точка оказывается ближайшей, то на выходе всех вычитателей блока 13 сигнал вида "1" и на сигнальном выходе блока 13 сигнал вида "1111" (при четырех вычитателях). Если ближайшей точкой оказывается вторая точка перебора, то на сигнальном выходе блока 13 сигнал вида "0111". Если ближайшей точкой оказывается третья точка перебора, то на сигнальном выходе блока сигнал вида "1011" либо "0011". Если ближайшей точкой оказывается четвертая точка, то на сигнальном выходе блока сигнал имеет вид "0001" или "0101", или "1001", или "1101" и, наконец, если это пятая точка, то сигнал имеет вид "0000" или "0010", или "0100", или "0110", или "1000", или 1010, или "1100", или "1110".
Таким образом, на информационном выходе блока 13 имеют расстояние до ближайшей точки опасности, а на его сигнальном выходе - код, позволяющий определить номер точки, записанный в блоке хранения координат точек опасности, который поступает на дешифратор 20, определяющий адрес координат ближайшей точки. Сигнал с выхода дешифратора 20 через элемент ИЛИ 21 поступает в ячейку памяти блока 18 хранения координат точек опасности и считывает координаты ближайшей точки опасности, которые с его выхода поступают на первый вход элемента И 16.
Вычисленное значение расстояния до ближайшей точки опасности с информационного выхода блока 13 поступает на первый вход порогового элемента 12, первый вход блока 14 определения траверса, на вход триггера 15 с одним устойчивым состоянием равновесия и на второй вход блока 11 команд управления. На выходе триггера 15 появляется постоянный потенциал, поступающий на первый вход элемента И 16, благодаря чему координаты ближайшей точки опасности с выхода блока 18 хранения координат точек опасности через элемент И 16 поступают на второй вход блока 14 определения траверса. В блоке 14 определяется величина траверсов d до ближайшей точки опасности. Величина траверса d определяется из прямоугольного треугольника СЕК (фиг.9) по формуле
d = СЕ sin Δϕ= r sin Δϕ = r sin (ПУ-П).
Путевой угол в блоке 14 определения траверса определяется из выражения
ПУ = arctg  , где Δϕk, Δλk - приращение широты и долготы координат местоположения судна.
, где Δϕk, Δλk - приращение широты и долготы координат местоположения судна.
Пеленг в блоке 14 определения траверса, т.е. пеленг на точку опасности Еi, определяется как угол на сфере, заключенный между северным направлением меридиана и направлением на точку опасности. На фиг.9 представлены сферический треугольник CDЕ, в котором пеленг угла DCЕ образован линиями DC и CЕ. При этом положение точки С определяется текущими географическими координатами судна, положение точки D - координатой широты, равной 90o, и координатой долготы текущего местоположения судна, координаты точек опасности задаются заранее, перед плаванием, и хранятся в блоке 18 хранения координат точек опасности.
Значение пеленга - угол DCЕ - определяется из теоремы синусов =
=  где DЕ, ЕС - стороны сферического треугольника CDЕ (фиг.9); углы DCЕ, CDЕ - углы сферического треугольника CDЕ.
где DЕ, ЕС - стороны сферического треугольника CDЕ (фиг.9); углы DCЕ, CDЕ - углы сферического треугольника CDЕ.
Значение пеленга - угол DCЕ - определяется из выражения
DCE = arcsin 
В пороговом элементе 12 происходит сравнение тормозного пути судна Sтп и расстояние r до точки опасности. Если r < Sтп, то на выходе порогового элемента 12 появляется сигнал, характеризующий, что судно вошло в зону радиуса опасности и требуется повышенное внимание к его управлению.
С выхода блока 14 определения траверса значение вычисленного траверса поступает на третий вход блока 11 команд управления (второй вход элемента И 104), на первый вход которого (вход элемента 103 сравнения) с выхода блока 9 определения пути торможения поступает длина тормозного пути Sтп, а на его второй вход (второй вход элемента 103 сравнения) с выхода блока 13 определения ближайшей точки опасности поступает расстояние до точки опасности (r). Когда величина тормозного пути Sтп cтановится равна расстоянию r до точки опасности, срабатывает элемент сравнения, с выхода которого на первый вход элемента И 104 поступает постоянный потенциал, в результате чего элемент И 104 срабатывает и значение величины траверса d поступает на вход пороговых элементов 105. Каждый из этих пороговых элементов имеет фиксированный пoрог, соответствующий определенной величине траверса от максимально безопасного до траверса, равного нулю, т.е. когда точка опасности лежит на линии пути движения судна. Между этими крайними значениями может выбираться любое число значений траверса, в общем случае n. Обозначают пороговые величины пороговых элементов 1051... 105n через а1, а2, а3...аn, при этом
а1 < а2 < а3 < ... < аn (d1 = 0, аn = dбез).
Допускают, что величина траверса d = a1 = 0. В этом случае срабатывает первый пороговый элемент 1051 и на его выходе появляется сигнал, равный "1", в то время как на выходе остальных пороговых элементов 105 (1052... 105n) сигнал, равный "0". Если величина траверса d = dбез, то срабатывают все пороговые элементы 105 и на их выходах сигнал, равный "1". Таким образом, в зависимости от величины траверса на выходе блока 11 команд управления формируется сигнал в двоичном коде, имеющий различный (неповторимый) набор "1" и "0". Эти сигналы можно использовать для формирования различных команд движения судна. Например, когда d = 0, сигнал имеет вид 110203...0n и может быть использован для формирования команды "полный назад". Эту комбинацию можно использовать для формирования команд поворота судна. Когда d = dбез, на выходе блока формируется сигнал вида 111213...1n. В этом случае судно продолжает движение без изменения.
Анализ расстояний до точек опасности происходит постоянно. В какой-то момент времени ближайшей точкой опасности становится другая точка, лежащая на трассе движения судна. В этом случае все расчеты повторяются уже для этой новой точки и все команды управления формируются относительно этой точки опасности.
Положительный эффект предлагаемого технического решения по сравнению с прототипом заключается в снижении аварийности и повышении безопасности движения судна за счет снижения роли человеческого фактора путем включения системы дублирования. Навигационный прибор - одно из важных средств дублирования, поскольку способствует предотвращению ошибки человека. Интересно в связи с этим отметить, что сумма убытков за 10 лет от посадки и касания грунта только в Балтийских и Черноморских проливах соизмерима с расходами на оборудование всех судов ММФ бортовыми приемоиндикаторами фазовых РНС.
Отличительной особенностью предлагаемого приемоиндикатора РНС является то, что помимо основной информации об опасности судовождения, вырабатываемой автоматически (т.е. сигнал нахождения в зоне опасности, команды управления движением судна, величины траверса на точку опасности), он дает дополнительную информацию, которая может быть использована для оценки аварийности ситуации, а именно расстояние до точки опасности, координаты точки опасности. Имеется возможность вывода на дисплей значения пеленга на точку опасности и путевого угла движения судна. В блок 18 хранения координат точек опасности координаты этих точек могут быть введены с выхода радиолокационной станции. Таким образом, комплексная информация, вырабатываемая приемоиндикатором, дает возможность своевременно принимать правильные решения в аварийной обстановке с учетом всех действующих факторов.



Сущность изобретения: приемоиндикатор радионавигационной системы содержит антенну 1, предварительный усилитель 2, переключатель 3 сигналов, преобразователь 4, коррелятор 5, процессор 6 для обнаружения сигналов, процессор 7 для определения координат местоположения, формирователь сигналов 8 сетки частот, блок 9 определения пути торможения, блок 10 формирования радиуса опасности, блок 11 команд управления, пороговый элемент 12, блок 13 определения ближайшей точки опасности, блок 14 определения траверса, триггер 15, элемент И 16, блок 17 определения расстояния, блоки 18, 19 памяти, дешифратор 20, элемент ИЛИ 21, счетчики 22, 23. 7 з.п. ф-лы, 11 ил.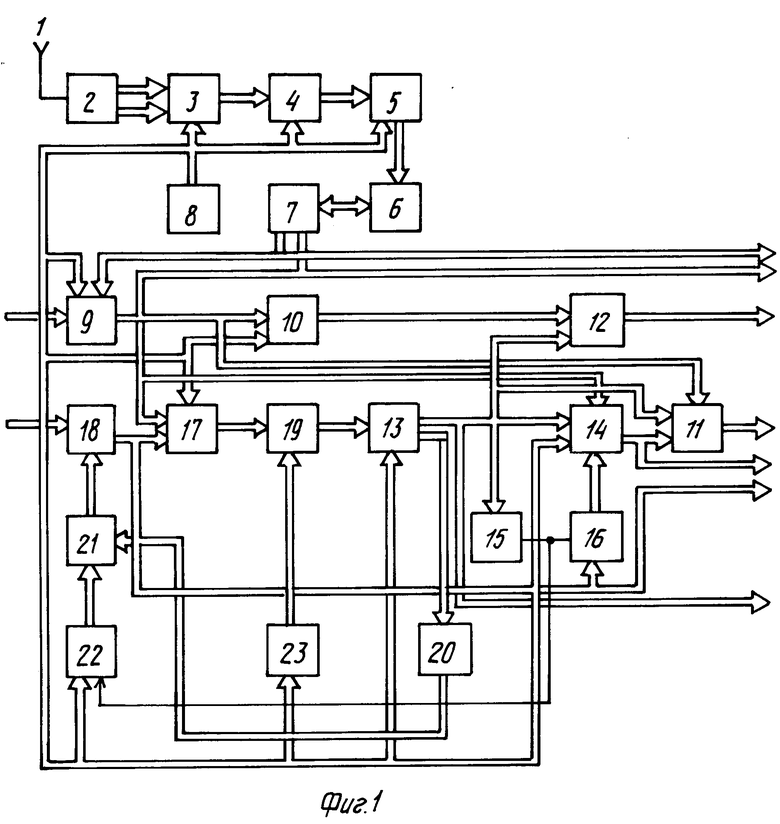

Δϕк - приращение широты в единицу времени; Δλк - приращение долготы в единицу времени.
| Бортовые устройства спутниковой радионавигации | |||
| /Под ред | |||
| В.С.Шебшаевича | |||
| М.: Транспорт, 1988, с.45-47. |
