ОБЛАСТЬ ТЕХНИКИ
Описанные варианты реализации изобретения в целом относятся к системам и способам исследования подземного ствола скважины и, в частности, к способу автоматического приема и оценки скважинного исследования.
УРОВЕНЬ ТЕХНИКИ
Как правило, при скважинных исследованиях во время бурения измеренные значения получают через некоторые интервалы. Например, статические значения скважинных исследований могут быть получены с интервалами от 30 футов (9,144 м) до 120 футов (36,576 м) при добавлении в бурильную колонну новой бурильной свечи. Местоположение, в котором получают статические значения скважинных исследований, называют точкой замера. Также могут быть получены измеренные значения во время бурения при динамических скважинных исследованиях с более высокой частотой (например, в 10 секундных интервалах). Как правило, такие статические и динамические скважинные исследования включают измерение угла наклона и азимута ствола скважины, которые характеризуют текущее направление бурения. Угол наклона скважины является угловым измеренным значением, которое характеризует отклонение ствола скважины от вертикали, а азимут ствола скважины является угловым измеренным значением, которое характеризует отклонение ствола скважины от заданного направления в горизонтальной плоскости (например, от магнитного или истинного севера).
Процесс получения данных исследований с достаточной точностью, как правило, требует удовлетворения нескольких критериев при проведении измерений. Например, могут выполняться определенные операции для обеспечения удовлетворения условий минимизации потенциальных ошибок. Кроме того, полученные данные скважинных измерений часто анализируют для того, чтобы убедиться, что качество данных соответствует требованиям. В настоящее время при бурении данные действия выполняются вручную различными сотрудниками, обслуживающими буровую установку. Ручные операции могут быть неэффективными, как с точки зрения затрат времени, так и экономических затрат, а также подвержены ошибкам, вызванным человеческим фактором. Таким образом, в данной области техники возможно улучшение способов проведения скважинных исследований.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Описывается способ автоматической оценки данных исследований подземного ствола скважины. Способ включает прием измеренных значений скважинного навигационного датчика и автоматическую оценку данных поверхностного датчика, полученных практически в то же время, что и измеренные значения от навигационного датчика, для определения, действительно ли результаты измерений навигационного датчика были получены при приемлемых условиях скважинных исследований ствола скважины. Результаты измерений навигационного датчика также могут оцениваться с целью определения, соответствуют ли эти измеренные значения заданным условиям, необходимым для получения приемлемых данных скважинного исследования. На основе результатов выполненных автоматических оценок автоматически формируется рекомендация для скважинных исследований.
Описанные варианты реализации изобретения могут обеспечить ряд технических преимуществ. Например, с помощью описанных вариантов реализации изобретения обеспечивают автоматический прием данных скважинных исследований. Данная автоматизация позволяет во время скважинных исследований быстро и надежно принимать или отклонять данные на основании заданного критерия принятия (или отклонения), в результате чего улучшается качество исследований и сокращается время бурения. Описанные варианты реализации изобретения могут обеспечить высокий уровень достоверности благодаря автоматической оценке, как состояния бурильной колонны (например, удовлетворяется ли заданное условие, необходимое для получения данных скважинных исследований), так и качества данных навигационного датчика.
Данное краткое описание приводится с целью представления выбора концепций, которые дополнительно описаны ниже в подробном описании. Данное краткое описание не предназначено для идентификации ключевых или существенных признаков заявленного объекта изобретения, а также не предназначено для использования с целью ограничения объема заявленного объекта изобретения.
КРАТКОЕ ОПИСАНИЕ ГРАФИЧЕСКИХ МАТЕРИАЛОВ
Для более полного понимания описанного объекта изобретения и его преимуществ приводится ссылка на последующие описания, связанные с прилагаемыми графическими материалами, на которых:
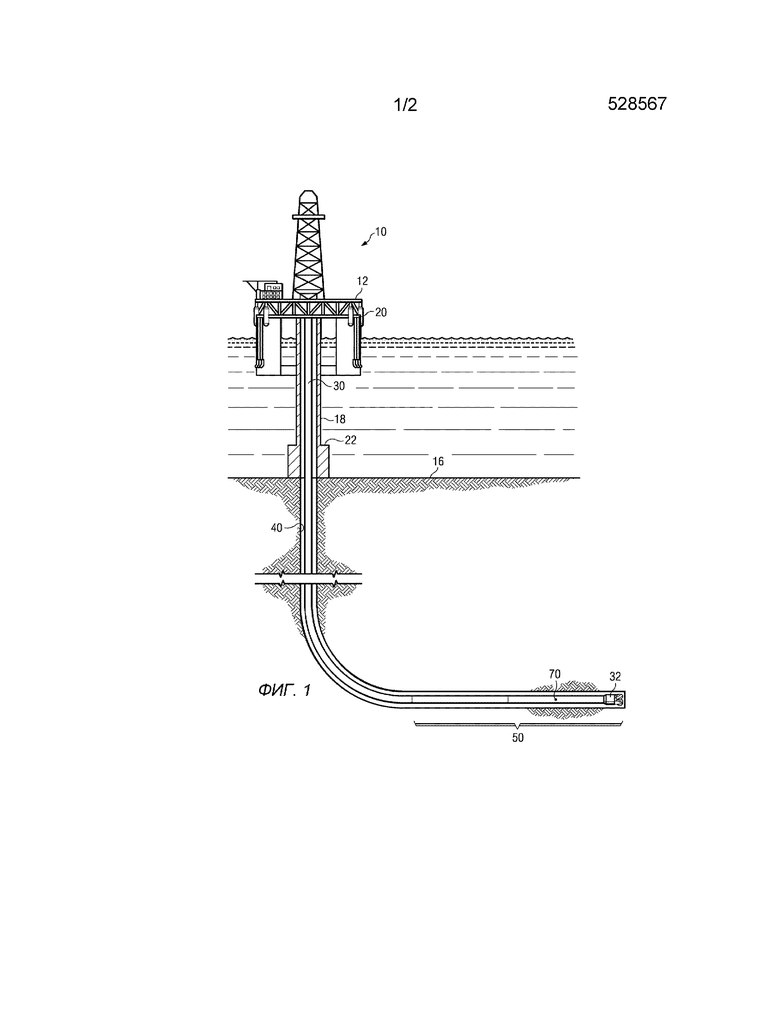
На Фиг. 1 проиллюстрирована типовая буровая установка, на которой могут использоваться описанные варианты реализации изобретения.
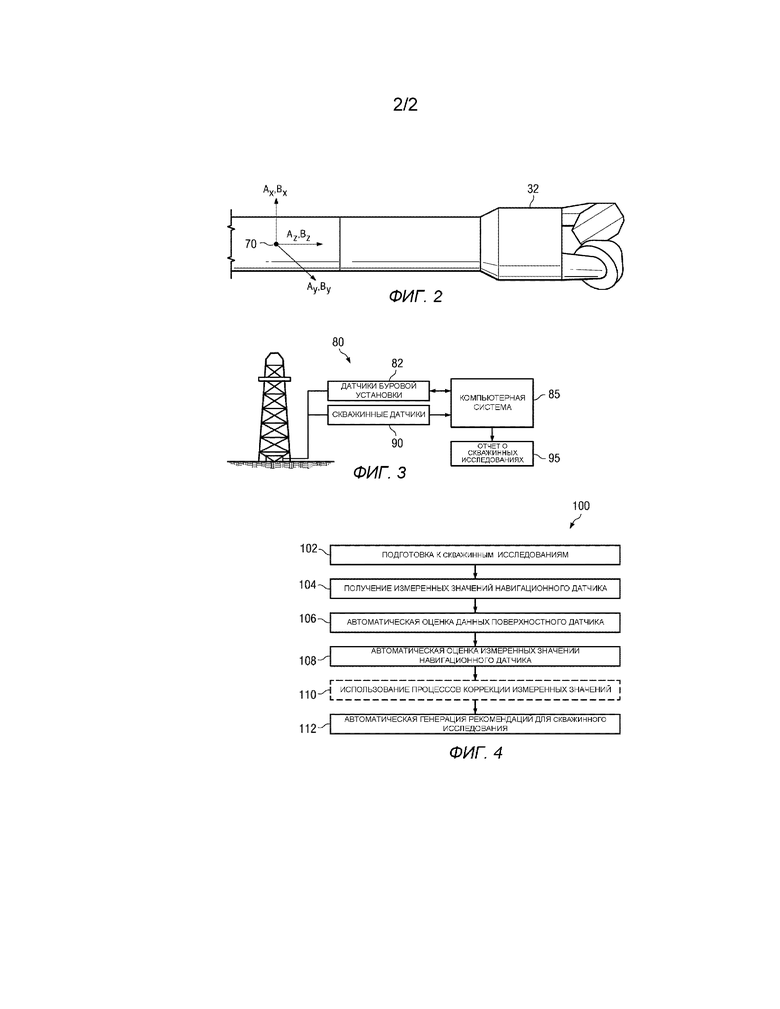
На Фиг. 2 проиллюстрирована нижняя часть КНБК (компоновки низа бурильной колонны), проиллюстрированной на Фиг. 1.
На Фиг. 3 проиллюстрирован один из описанных вариантов реализации системы для автоматического приема данных скважинных исследований.
На Фиг. 4 проиллюстрирована блок-схема одного из описанных способов реализации изобретения для получения данных скважинных исследований.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
На Фиг. 1 проиллюстрирована типовая буровая установка, применяемая для использования различных способов и систем, описанных в данной заявке. Полупогружная буровая платформа 12 расположена над нефтяным или газовым пластом (не показан), находящимся ниже морского дна 16. Подводный трубопровод 18 проходит от палубы 20 платформы 12 к устьевой арматуре 22. Платформа может содержать вышку и подъемное устройство (называемое также блоком или талевым блоком) для подъема и спуска бурильной колонны 30, которая, как проиллюстрировано, проходит в ствол скважины 40 и содержит компоновку низа бурильной колонны (КНБК) 50.
В описанном варианте реализации изобретения КНБК 50 содержит буровое долото 32 и один или более скважинных навигационных датчиков 70. Навигационные датчики 70 могут быть установлены практически в любом месте КБНК 50, например в инструменте для измерений во время бурения (ИВБ), в инструменте для каротажа во время бурения (КВБ), в модуле для управления направлением бурения, в наддолотном переводнике скважинного датчика, и т.д. Бурильная колонна может дополнительно содержать множество навигационных датчиков, установленных, например, в модуле управления направлением бурения, расположенном рядом с буровым долотом 32 и инструментом ИВБ, расположенным значительно выше бурового долота. Комплект навигационного датчика, как правило, содержит набор трехосных (три оси координат) акселерометров и набор трехосных магнитометров, которые более подробно описаны ниже со ссылкой на Фиг. 2. При этом описанные варианты реализации изобретения не являются ограничивающими в отношении комплекта навигационного датчика и могут содержать альтернативную схему расположения акселерометра и/или магнитометра, а также могут дополнительно и/или в качестве альтернативы содержать гироскопические датчики. КНБК 50 может дополнительно содержать практически любые подходящие скважинные инструменты, например винтовой забойный двигатель, скважинную телеметрическую систему, расширитель ствола скважины, и т.д. Описанные варианты реализации изобретения не являются ограничивающими по отношению к другим подобным инструментам.
Хотя это не показано, буровая установка может содержать поворотный стол или верхний силовой привод для вращения бурильной колонны 30 (или других компонентов) в стволе скважины. Буровая установка может дополнительно содержать вертлюг, с помощью которого вращается бурильная колонна, при этом между внутренней и наружной поверхностью трубы сохраняется герметичное жидкостное уплотнение. Во время проведения буровых работ насосы выкачивают буровой раствор («буровую грязь») из резервуара или цистерны, а затем перекачивают буровую грязь через внутреннее пространство бурильной колонны 30 к буровому долоту 32, благодаря чему осуществляется смазка и охлаждение долота, а также вынос бурового шлама на поверхность. Данное оборудование хорошо знакомо специалистам в данной области техники и нет необходимости в более детальном рассмотрении в данной заявке.
Плавучая буровая установка может также содержать поверхностные датчики (не показаны на Фиг. 1) для измерения и/или мониторинга функционирования буровой установки. К данным датчикам могут, например, относиться: (i) датчик нагрузки на крюк для измерения веса (например, нагрузки) бурильной колонны на подъемное устройство, (ii) датчик положения блока для измерения вертикального положения и/или скорости талевого блока (или верхней части бурильной свечи) на буровой установке при подъеме и спуске различных компонентов в ствол скважины, (iii) датчик давления бурового раствора для измерения давления бурового раствора, закачанного в ствол скважины, (iv) датчик расхода бурового раствора для измерения скорости потока бурового потока в бурильной колонне, и (iv) поверхностный датчик крутящего момента для измерения крутящего момента, создаваемого верхним силовым приводом или поворотным столом. Данное оборудование широко известно в данной области промышленности и не нуждается в более детальном рассмотрении в данной заявке.
Специалистам в данной области техники будет понятно, что размещение оборудования, проиллюстрированное на Фиг. 1, приводится исключительно в качестве примера. В то время как на Фиг. 1 проиллюстрировано буровое долото 32, описанные варианты реализации изобретения не являются ограничивающими в этом отношении, поскольку данные скважинного исследования также могут получать на открытом конце бурильной трубы (например, во время расширения ствола скважины или других не буровых работ). Далее будет понятно, что описанные варианты реализации изобретения не ограничиваются использованием полупогружной платформы 12, проиллюстрированной на Фиг. 1. Описанные варианты реализации изобретения в равной степени хорошо подходят при использовании при подземных буровых работах любого типа, либо на шельфе, либо на суше.
На Фиг. 2 проиллюстрирована нижняя часть КНБК бурильной колонны 30, содержащая буровое долото 32 и навигационные датчики 70. Как было проиллюстрировано выше применительно к Фиг. 1, навигационные датчики 70 могут содержать наборы датчиков трехосного акселерометра и трехосного магнитометра. Подходящие акселерометры и магнитометры могут быть выбраны из практически любых подходящих устройств, известных в данной области техники и имеющихся на рынке. На Фиг. 2 дополнительно проиллюстрировано схематическое представление наборов датчиков трехосного акселерометра и трехосного магнитометра. Трехосный подразумевает, что каждый набор датчиков содержит три взаимно перпендикулярных датчика, причем акселерометры обозначены как Ax, Ay, и Az и магнитометры обозначены как Bx, By, и Bz. По определению, правовинтовой, как правило, называется система, в которой акселерометр по оси z и магнитометр по оси z (Az и Bz) ориентированы приблизительно параллельно стволу буровой скважины, как отображено (хотя описанные варианты реализации изобретения не ограничиваются данными определениями). Таким образом, каждый из наборов акселерометра и магнитометра может рассматриваться как определяющий плоскость (оси х и у) и полюс (ось z вдоль оси КНБК). Специалистам в данной области техники будет нетрудно понять, что наборы навигационных датчиков измеряют ориентацию оси инструмента (которая не всегда является строго параллельной оси ствола скважины), и для получения более точной оценки ориентации ствола скважины может понадобиться коррекция (например, коррекция прогиба).
На Фиг. 3 проиллюстрирован вариант реализации системы 80 для автоматической оценки данных, полученных во время исследования скважины. Система может быть реализована на буровой площадке, например, как локальная компьютерная система 85. Система может содержать множество датчиков буровой установки 82, например, указанных со ссылкой на Фиг. 1. Датчики буровой установки могут быть связаны с помощью электронных средств связи с компьютерной системой 85 таким образом, что измеренные значения датчика могут передаваться компьютерной системе, в которой могут использоваться для оценки буровой деятельности во время получения данных скважинных исследований. Система может дополнительно содержать множество скважинных датчиков 90, таких как навигационные датчики 70, проиллюстрированные на Фиг. 1. Скважинные датчики 90 могут также быть связаны с компьютерной системой с помощью электронных средств связи, например, посредством телеметрической линии, такой как бурильная труба со встроенным кабелем для передачи сигнала, гидроимпульсная телеметрия, электромагнитная телеметрия, и т. п. Компьютерная система 85 выполнена с возможностью обработки данных от датчиков буровой установки и скважинных датчиков для автоматической генерации отчета о скважинном исследовании 95. Отчет о скважинном исследовании 95 может содержать данные скважинного исследования, полученные наряду с принятыми значениями угла наклона и азимута ствола скважины. Кроме того, отчет о скважинном исследовании 95 может содержать отказ от проведения скважинного исследования и соответствующие причины отказа.
Следует понимать, что не обязательно, чтобы все компоненты системы 80 находились на буровой площадке. Например, компьютерная система 85 может быть расположена вне буровой площадки и может быть связана с датчиками буровой установки 82 и скважинными датчиками 90 с помощью практически любых известных средств связи (например, с помощью беспроводных каналов связи или через интернет, или интранет). Описанные варианты реализации изобретения не ограничены в данных отношениях. Также они не ограничены какой-либо конкретной аппаратной реализацией системы 80.
На Фиг. 4 проиллюстрирована блок-схема одного описанного варианта реализации способа 100 для оценки данных, полученных во время скважинного исследования скважины. В блоке 102 могут выполняться различные операции для подготовки к операции скважинного исследования с целью обеспечения оптимальных (или приемлемых) условий для скважинного исследования скважины. Значения навигационных измерений в стволе скважины получают в блоке 104. В блоке 106 оценивают данные поверхностного датчика для проверки, удовлетворяются ли условия, существующие при получении в блоке 104 измеренных значений скважинного исследования. Значения измерений навигационного датчика оценивают в 108 в соответствии с определенным динамическим критерием с целью обеспечить высокое качество данных. Для улучшения качества скважинного исследования дополнительно могут выполнять процессы коррекции измеренных значений в блоке 110. В блоке 112 автоматически генерируется рекомендация (или отчет), относящаяся к качеству скважинного исследования и дальнейшим действиям, таким как принятие или отклонение данных скважинного исследования, продолжительность бурения, получение данных другого скважинного исследования, и т. д.
Как известно специалистам в данной области техники, скважинные исследования, как правило, выполняют во время бурения через определенные интервалы (например, в интервалах от 30 футов (9,144 м) до 120 футов (36,576 м) при добавлении в бурильную колонну новой бурильной свечи). Данные скважинного исследования при измерении во время бурения (MWD), как правило, содержат измеренные значения трехосного акселерометра и трехосного магнитометра, на основании которых могут быть вычислены угол наклона и азимут ствола скважины. Угол наклона ствола скважины измеряют как отклонение направления бурения от вертикали, в то время как азимут измеряют как отклонение от направления бурения (в горизонтальной плоскости) от магнитного (или истинного) севера. С целью повышения точности скважинного исследования измерения навигационного датчика (скважинные измерения), как правило, выполняют в условиях, когда датчики неподвижны и отсутствует магнитная интерференция. Описанные варианты реализации изобретения могут использоваться как при статических, так и при динамических скважинных исследованиях.
В блоке 102 могут выполняться подготовительные операции с целью повышения вероятности того, что удовлетворяются условия, существующие при выполнении скважинного исследования. Например, бурильная колонна может быть поднята над забоем, при этом высвобождается крутильная энергия и энергия сжатия бурильной колонны. Аналогично, верхний силовой привод (или поворотный стол), а также блок могут удерживаться неподвижно таким образом, что датчики будут неподвижными и не подверженными вращательному или продольному движению. В зависимости от конкретной буровой установки и конфигурации КНБК, насосы могут быть выключены или включены.
Измеренные значения навигационного датчика (например, измеренные значения акселерометра или магнитометра) могут быть получены в блоке 104 и переданы на поверхность (например, посредством типового канала телеметрии). Значениям измерений в стволе скважины могут присваиваться временные метки. В другом варианте реализации изобретения время, когда выполнялись измерения, может быть непосредственно измерено или определено на основании различных измерений на поверхности. Измеренные значения акселерометра могут содержать значения трехосных измерений, содержащие измеренные значения Ax, Ay, и Az, в то время как измеренные значения магнитометра могут также содержать значения трехосных измерений, содержащие измеренные значения Bx, By, и Bz, как описано выше в отношении Фиг. 2. В другом варианте реализации изобретения измерения акселерометра и магнитометра могут выполняться в стволе скважины для получения угла наклона ствола скважины, азимута ствола скважины, положения отклонителя, магнитного наклонения, суммарной напряженности гравитационного поля, а также суммарной напряженности магнитного поля, при этом данные значения могут передаваться на поверхность.
Данные поверхностного датчика могут автоматически оцениваться в блоке 106 для проверки, удовлетворяются ли условия, существующие при получении измеренных значений скважинного исследования в блоке 104. Например, данные датчика нагрузки на крюк могут оцениваться с целью убедиться, находилось ли буровое долото над забоем скважины при проведении измерений с помощью навигационного датчика (для определения, находится ли оснастка над забоем скважины могут также сравнивать глубину нахождения бурового долота и глубину скважины). Данные датчика положения блока могут оцениваться с целью убедиться, что скорость блока была равной нулю (или близкой к нулю). Данные датчика крутящего момента могут оцениваться с целью убедиться, что скорость вращения бурильной колонны была равной нулю (или близкой к нулю). Кроме того, данные датчика давления бурового раствора или данные датчика расхода бурового раствора могут оцениваться с целью убедиться, что насосы были включены или выключены, в зависимости от буровой установки. Измеренные значения глубины погружения бурового долота и глубины скважины могут также сравниваться с целью определения близости навигационных датчиков к магнитоактивным элементам обсадной колонны или башмака обсадной колонны. Желательно, чтобы расстояние между датчиками и магнитоактивными компонентами обсадной колонны было больше заданного порогового значения.
Измеренные значения акселерометра и магнитометра могут автоматически оцениваться в блоке 108 для проверки того, что измеренные значения соответствуют заданным условиям для получения данных скважинного исследования приемлемого качества. Например, измеренные значения акселерометра могут обрабатываться с целью вычисления суммарного ускорения, которое может сравниваться с эталонным значением напряженности гравитационного поля, чтобы убедиться, что суммарное ускорение равно величине гравитационного поля Земли (в заданных пределах). Аналогично, измеренные значения магнитометра могут обрабатываться с целью вычисления суммарной напряженности магнитного поля, которая может сравниваться с эталонным значением напряженности магнитного поля Земли чтобы убедиться, что суммарная напряженность магнитного поля равна величине напряженности магнитного поля Земли (в заданных пределах). Кроме того, измеренные значения акселерометра могут дополнительно обрабатываться с целью вычисления угла магнитного склонения, который может сравниваться с эталонным значением в точке бурения с целью убедиться, что измеренный угол магнитного склонения равен углу магнитного склонения гравитационного поля Земли (в заданных пределах).
Суммарное ускорение может быть вычислено, например, как указано ниже:
QUOTE  (1)
(1)
где A соответствует суммарному ускорению; QUOTE  , QUOTE
, QUOTE  и QUOTE
и QUOTE  соответствуют значениям измерений акселерометра по осям x, y и z. В отсутствие вибраций бурильной колонны суммарное ускорение должно равняться ускорению свободного падения на поверхности Земли. Суммарная напряженность магнитного поля может быть вычислена, например, как указано ниже:
соответствуют значениям измерений акселерометра по осям x, y и z. В отсутствие вибраций бурильной колонны суммарное ускорение должно равняться ускорению свободного падения на поверхности Земли. Суммарная напряженность магнитного поля может быть вычислена, например, как указано ниже:
QUOTE  (2)
(2)
где B соответствует суммарной напряженности магнитного поля; QUOTE  , QUOTE
, QUOTE  и QUOTE
и QUOTE  соответствуют значениям измерений магнитометра по осям x, y и z. При отсутствии внешних магнитных помех (например, от магнитных компонентов бурильной колонны или магнитных руд в пласте) суммарная напряженность магнитного поля должна равняться напряженности магнитного поля Земли. Угол магнитного склонения может быть вычислен, например, как указано ниже:
соответствуют значениям измерений магнитометра по осям x, y и z. При отсутствии внешних магнитных помех (например, от магнитных компонентов бурильной колонны или магнитных руд в пласте) суммарная напряженность магнитного поля должна равняться напряженности магнитного поля Земли. Угол магнитного склонения может быть вычислен, например, как указано ниже:
QUOTE  (3)
(3)
где TF соответствует углу отклонителя (верхней части угла) и Inc соответствует углу наклона ствола скважины. Угол отклонителя и угол наклона ствола скважины может быть вычислен на основании измеренных значений трехосного акселерометра, например, как указано ниже:
QUOTE  (4)
(4)
QUOTE  (5)
(5)
Для достижения уровня достоверности скважинного исследования, сравнимого с эталонным уровнем достоверности, оценка в блоке 108 может в качестве альтернативы и/или дополнительно включать совместную обработку суммарного ускорения, эталонного значения напряженности гравитационного поля Земли, суммарной напряженности магнитного поля, эталонного значения напряженности магнитного поля Земли, угла магнитного склонения и эталонного значения угла магнитного склонения Земли. Например, данные скважинного исследования могут быть приняты в случае, если вычисленное значение уровня достоверности больше или равно эталонному уровню достоверности, и отклонены в случае, если вычисленное значение уровня достоверности меньше эталонного уровня достоверности.
Эталонное значение напряженности гравитационного поля Земли и эталонное значение напряженности магнитного поля Земли (включая как величину, так и направление (или отклонение)) являются общеизвестными, например, из ранее собранных данных геологических скважинных исследований (например, Геологической службы США). При этом для некоторых применений может быть предпочтительно измерять значения гравитационного и магнитного полей в режиме реального времени на площадке, в месте, в котором практически отсутствуют магнитная интерференция, например, на поверхности скважины или в ранее пробуренной скважине. Измерение напряженности гравитационного и магнитного полей в режиме реального времени может быть предпочтительным тем, что в данном случае учитываются изменения, зависящие от времени (например, известно, что напряженность магнитного поля Земли меняется с течением времени). При этом на некоторых площадках, таких как морская буровая установка, может не быть возможности ровно разместить инструмент на площадке или устранить внешние вибрации. В таких случаях может быть предпочтительно использовать данные предыдущих геологических скважинных исследований в сочетании с подходящими методами интерполяции и/или математического моделирования (например, компьютерного моделирования), которые известны в данной области техники.
Следует понимать, что оценку в блоке 108 могут выполнять в скважине с помощью скважинного процессора. Например, значения суммарного ускорения, суммарной напряженности магнитного поля, угла магнитного склонения и/или величина достоверности могут вычисляться в скважине и сравниваться с хранящимися в памяти соответствующими эталонными значениями. В данном варианте реализации изобретения измеренные значения навигационного датчика могут передаваться на поверхность вместе с указанием принятия или отклонения данных скважинного исследования. В другом варианте реализации изобретения измеренные значения навигационного датчика могут передаваться на поверхность только после принятия данных измеренных значений. В некоторых вариантах реализации изобретения при отклонении могут активироваться навигационные датчики для автоматического выполнения новых измерений.
Следует также понимать, что в результате оценки в блоке 108 данные навигационного датчика могут частично приниматься и/или частично отклоняться. Например, качество данных акселерометра может быть приемлемым, что приводит к принятию измеренного значения угла наклона ствола скважины, при этом в то же время качество данных магнитометра может быть неприемлемым, что приводит к отклонению неприемлемого измеренного значения азимута ствола скважины.
В блоке 110 для повышения качества данных скважинных исследований (качества данных навигационного датчика) могут дополнительно использоваться методы коррекции измеренных значений. Данные методы коррекции измеренных значений могут включать, например, коррекцию прогиба для коррекции несоосности бурильной колонны и ствола скважины, а также многостанционный анализ для коррекции магнитной интерференции в бурильной колонне.
В блоке 112 может автоматически генерироваться рекомендация (или отчет) по скважинному исследованию. Например, если результаты оценки, выполненной в блоках 106 и 108, указывают на то, что данные скважинного исследования являются данными приемлемого качества, данные скважинного исследования могут быть приняты автоматически и может быть предоставлена рекомендация для продолжения бурения. В другом варианте реализации изобретения, если один (или оба) результата оценки, выполненной в блоках 106 и 108 указывают на то, что результат скважинного исследования является сомнительным, данные скважинного исследования могут быть отклонены и может быть предоставлена рекомендация для проведения другого скважинного исследования. Также могут быть отмечены причины отклонения для оповещения персонала буровой установки. Например, данные скважинного исследования могут быть отклонены (или помечены для дальнейшего рассмотрения) в случае, если один из буровых датчиков указывает в блоке 106 на то, что во время получения измеренных значений скважинного исследования условия были неприемлемыми. В другом варианте реализации изобретения данные скважинных исследований могут быть отклонены, если значения скважинного исследования не удовлетворяют вышеописанные заданные условия (как оценено в 108).
Подобный подход может использоваться для автоматического принятия или отклонения динамических данных скважинных исследований. Например, данные акселерометра или магнитометра по одной оси (оси z) могут автоматически сравниваться с эталонными данными, полученными во время предыдущего статического скважинного исследования.
Несмотря на то, что автоматическое принятие данных скважинного исследования скважины, а также некоторые преимущества данного способа были описаны достаточно подробно, следует понимать, что в данную заявку могут быть внесены различные изменения, замены и исправления без отклонения от идеи и объема изобретения, определенного прилагаемой формулой изобретения.
Изобретение относится к средствам исследования скважин. Техническим результатом является повышение точности получения данных исследований. Предложен способ автоматической оценки данных скважинного исследования подземного ствола скважины, включающий прием измеренных значений скважинного навигационного датчика и автоматическую оценку данных наземного датчика, полученных практически в то же время, что и измеренные значения от навигационного датчика, для определения, действительно ли измеренные значения навигационного датчика были получены при приемлемых условиях скважинных исследований ствола скважины. Измеренные значения навигационного датчика оцениваются для определения, удовлетворяют ли измеренные значения определенным заданным условиям, требуемым для получения приемлемых данных скважинного исследования. Рекомендация для скважинного исследования автоматически генерируется на основании выполненных автоматических оценок. 3 н. и 17 з.п. ф-лы, 4 ил.
1. Способ исследования подземного ствола скважины, включающий:
(a) размещение бурильной колонны в подземном стволе скважины, причем бурильная колонна содержит один или несколько наборов навигационных датчиков;
(b) выполнение операций по подготовке к исследованию с целью обеспечения приемлемых условий для исследования, основанных на положении бурильной колонны в стволе скважины и специфических требований, наборов навигационных датчиков для приема и передачи данных исследования;
(c) активацию наборов скважинных навигационных датчиков с целью получения измеренных значений навигационных датчиков;
(d) автоматическую оценку измеренных значений поверхностных датчиков, полученных практически в то же время, что и измеренные значения навигационного датчика, для определения, были ли получены измеренные значения навигационного датчика в приемлемых условиях скважинных исследований;
(e) автоматическую оценку измеренных значений навигационного датчика для определения, удовлетворяют ли измеренные значения навигационного датчика заданным условиям, требуемым для получения приемлемых данных исследований; и
(f) автоматическую генерацию рекомендации для исследования на основании указанных автоматических оценок, выполненных в (d) и (e).
2. Способ по п. 1, отличающийся тем, что операции по подготовке к исследованию включают (i) подъем бурильной колонны так, чтобы буровое долото находилось над забоем скважины, и (ii) удержание бурильной колонны во вращательно неподвижном положении относительно подземного ствола скважины.
3. Способ по п. 1, отличающийся тем, что измеренные значения навигационного датчика содержат измеренные значения акселерометра и магнитометра.
4. Способ по п. 1, отличающийся тем, что измеренные значения поверхностного датчика содержат по меньшей мере одно из следующего: измеренные значения датчика нагрузки на крюк, измеренные значения положения и скорости талевого блока, измеренные значения крутящего момента и скорости вращения бурильной колонны на поверхности, измеренные значения глубины погружения бурового долота и глубины скважины.
5. Способ по п. 4, отличающийся тем, что выполняют проверку, удовлетворяют ли измеренные значения поверхностного датчика приемлемым скважинным условиям для исследования скважины в случае, если (i) по меньшей мере одно из измеренных значений датчика нагрузки на крюк и значение измерения глубины погружения бурового долота и глубины скважины указывает на то, что буровое долото находится над забоем скважины, (ii) измеренные значения положения и скорости талевого блока указывают на то, что скорость талевого блока приблизительно равна нулю, и (iii) измеренные значения крутящего момента и скорости вращения указывают на то, что крутящий момент и скорость вращения бурильной колонны приблизительно равны нулю.
6. Способ по п. 4, отличающийся тем, что выполняется проверка, удовлетворяют ли измеренные значения поверхностного датчика приемлемым скважинным условиям для исследования скважины в случае, если измеренные значения глубины погружения бурового долота и глубины скважины указывают на то, что расстояние между навигационными датчиками и магнитоактивными элементами обсадной колонны превышает заданное пороговое значение.
7. Способ по п. 1, отличающийся тем, что указанная автоматическая оценка в (e) содержит по меньшей мере одно из следующего: (i) обработку измеренного значения навигационного датчика с целью вычисления суммарного значения ускорения и сравнение суммарного ускорения с эталонным значением напряженности гравитационного поля Земли, (ii) обработку измеренных значений навигационного датчика с целью вычисления суммарного значения напряженности магнитного поля и сравнение суммарного значения напряженности магнитного поля с эталонным значением напряженности магнитного поля Земли, (iii) обработку измеренных значений навигационного датчика с целью вычисления угла магнитного склонения и сравнение угла магнитного склонения с эталонным значением угла магнитного склонения Земли, (iv) совместную обработку значения суммарного ускорения, эталонного значения напряженности магнитного поля Земли, суммарного значения напряженности магнитного поля, эталонного значения напряженности магнитного поля Земли, значения угла магнитного склонения и эталонного значения угла магнитного склонения Земли с целью достижения требуемого уровня достоверности скважинного исследования.
8. Способ по п. 7, отличающийся тем, что при автоматической оценке в (e) проверяют соответствие полученных приемлемых данных исследований заданным условиям в случае, если (i) суммарное значение ускорения практически равно эталонному значению напряженности гравитационного поля Земли, (ii) значение суммарного значения напряженности магнитного поля Земли практически равно эталонному значению напряженности магнитного поля Земли, (iii) значение угла магнитного склонения практически равно эталонному значению угла магнитного склонения Земли.
9. Способ по п. 1, отличающийся тем, что рекомендация для скважинного исследования включает автоматическое принятие данных скважинного исследования в случае, если при автоматической оценке в (d) определено, что измеренные значения навигационного датчика были получены при приемлемых условиях исследования скважины и автоматическую оценку в (е), при которой определяется, соответствуют ли значения измерения навигационного датчика заданным условиям, необходимым для получения приемлемых данных скважинных исследований.
10. Способ по п. 1, дополнительно включающий:
(g) автоматическое использование методов коррекции измеренных значений с целью улучшения качества измеренных значений навигационного датчика.
11. Способ автоматической оценки данных исследования подземного ствола скважины, включающий:
(a) прием измеренных значений скважинного навигационного датчика;
(b) прием измеренных значений поверхностного датчика, выполненных практически в то же время, что и измерения навигационного датчика;
(с) автоматическую оценку измеренных значений поверхностных датчиков для определения, были ли измеренные значения навигационного датчика получены при приемлемых условиях скважинных исследований;
(d) автоматическую оценку измеренных значений навигационного датчика для определения, удовлетворяют ли значения измерений навигационного датчика заданным условиям, необходимым для получения приемлемых данных скважинных исследований; и
(е) автоматическую генерацию рекомендации для исследования на основании указанных автоматических оценок, выполненных в (с) и (d).
12. Способ по п. 11, отличающийся тем, что измеренные значения навигационного датчика содержат измеренные значения трехосного акселерометра и измеренные значения трехосного магнитометра.
13. Способ по п. 11, отличающийся тем, что измеренные значения поверхностного датчика содержат по меньшей мере одно из следующего: измеренное значение датчика нагрузки на крюк, измеренное значение положения и скорости талевого блока, измеренное значение крутящего момента и скорости вращения бурильной колонны на поверхности, а также измеренное значение глубины погружения бурового долота и глубины скважины.
14. Способ по п. 13, отличающийся тем, что выполняется проверка, удовлетворяют ли измеренные значения поверхностного датчика условиям для исследования скважины в случае, если (i) по меньшей мере одно из измеренных значений датчика нагрузки на крюк и измеренных значений глубины погружения бурового долота и глубины скважины указывает на то, что буровое долото находится над забоем скважины, (ii) измеренные значения положения и скорости талевого блока указывают на то, что скорость талевого блока приблизительно равна нулю, и (iii) измеренные значения крутящего момента и скорости вращения указывают на то, что крутящий момент и скорость вращения бурильной колонны приблизительно равны нулю.
15. Способ по п. 13, отличающийся тем, что выполняется проверка, удовлетворяют ли измеренные значения поверхностного датчика условиям для исследования скважины в случае, если измеренные значения глубины бурового долота и глубины скважины указывают на то, что расстояние между навигационными датчиками и магнитоактивными элементами обсадной колонны превышает заданное пороговое значение.
16. Способ по п. 11, отличающийся тем, что указанная автоматическая оценка в (с) содержит по меньшей мере одно из следующего: (i) обработку измеренных значений навигационного датчика с целью вычисления суммарного значения ускорения и сравнение суммарного ускорения с эталонным значением напряженности гравитационного поля Земли, (ii) обработку измеренных значений навигационного датчика с целью вычисления суммарного значения напряженности магнитного поля и сравнение суммарного значения напряженности магнитного поля с эталонным значением напряженности магнитного поля Земли, (iii) обработку измеренных значений навигационного датчика с целью вычисления угла магнитного склонения и сравнение угла магнитного склонения с эталонным значением угла магнитного склонения Земли.
17. Способ по п. 16, отличающийся тем, что при автоматической оценке в (с) выполняется проверка, соответствуют ли полученные приемлемые данные скважинных исследований заданным условиям в случае, если (i) суммарное значение ускорения практически равно эталонному значению напряженности гравитационного поля Земли, (ii) величина суммарного значения напряженности магнитного поля Земли практически равна эталонному значению напряженности магнитного поля Земли, (iii) значение угла магнитного склонения практически равно эталонному значению угла магнитного склонения Земли.
18. Способ по п. 11, отличающийся тем, что рекомендация для скважинного исследования включает автоматическое принятие данных скважинного исследования в случае, если при автоматической оценке в (b) выполняется проверка, были ли получены измеренные значения навигационного датчика при приемлемых условиях исследования скважины, и автоматическую оценку в (с), во время которой выполняется проверка, соответствуют ли измеренные значения навигационного датчика заданным условиям, необходимым для получения приемлемых данных скважинных исследований.
19. Способ по п. 1, дополнительно включающий:
(е) автоматическое использование методов коррекции измеренных значений для улучшения качества измеренных значений навигационного датчика.
20. Система для автоматической оценки данных исследования скважины, содержащая:
множество поверхностных датчиков, расположенных на буровой установке;
компьютерный процессор, выполненный с возможность электронной связи с поверхностными датчиками, выполненный с возможностью автоматического (a) приема измеренных значений от скважинного навигационного датчика; (b) приема измеренных значений от поверхностных датчиков; (c) оценки измеренных значений поверхностного датчика с целью определения, были ли получены измеренные значения навигационного датчика в то время, когда выполнялись приемлемые условия для скважинных исследований в стволе скважины; (d) оценки измеренных значений навигационного датчика с целью определения, соответствуют ли данные значения определенным заданным условиям, требуемым для получения приемлемых данных скважинных исследований; и (e) генерации рекомендации для скважинного исследования на основе указанных автоматических оценок, выполненных в (c) и (d).
| US 20030146022 A1, 07.08.2003 | |||
| СИСТЕМА ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ЗАБОЙНЫХ СКВАЖИН | 2001 |
|
RU2204712C2 |
| Устройство для укладки в ящики бисквитов или галет | 1939 |
|
SU67635A1 |
| US 5842149 A1, 24.11.1998 | |||
| US 5623407 A1, 22.04.1997 | |||
| US 20100332175 A1, 30.12.2010 | |||
| US 7730967 B2, 08.06.2010. | |||

