10
со
СО Сл
ОС 4:
СО
IVVVVU и f
Ч.
/
фиг. 1
1
i Изобретение относится к спорту, в част- ности к оборудованию, обеспечивающему тренировку пловцов, которые плавают способом «кроль на груди.
Цель изобретения - повышение эффективности тренировки путем отработки координации движений реального плавания.
На штоки 17 насажены толкающие пружины 24, которые передними торцами упи- с раются Б обоймы 16, а задними - во фланцы 25 штоков. Для направления переме- шения зубчатого полотна его задняя и передняя части имеют выступы с отверстиями (проушинами) 26, которыми плотно насажены на направляющую 27 с воз- 0 можностью продольного перемещения на этой направляющей, которая закреплена спереди на раме 1, а сзади - на фланце 25 штока.
Обе части платформы (тазовая и груд25
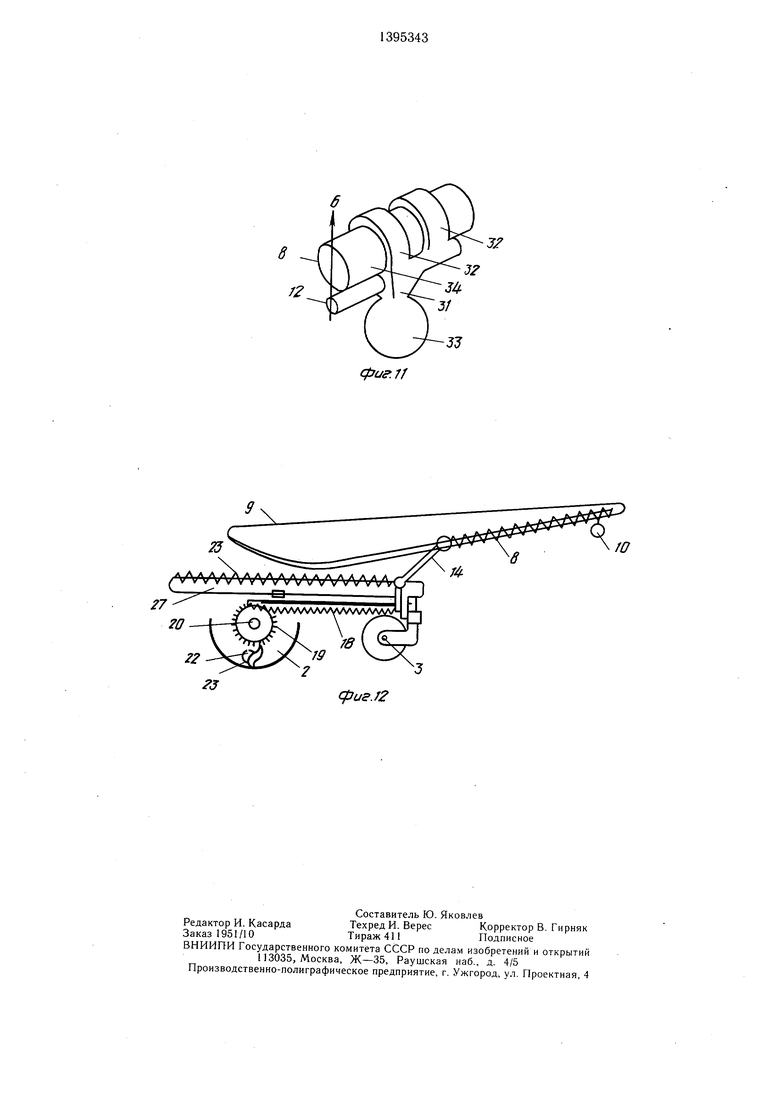
На фиг. 1 изображено устройство, общий вид; на фиг.- 2 - то же, вид сверху; на фиг. 3 - тележка устройства с направляющими и толкающей пружиной; на ;фиг. 4 - тележка, вид спереди; на фиг. 5 - :тележка, вид сзади; на фиг. 6 - штанга ножного привода; на фиг. 7 - правая направляющая с разрезами ее нижней вет- с ная) закреплень на консоли 4 своими опор- 1ви по А, Б, В, Г, Д, Е, Ж; на фиг. 8 - ными пластинами 28, на которых закреп- :подвижная рукоятка; на фиг. 9 - схема пе- |ремещения правой подвижной рукоятки по |точкам пересечения А, Б. В, Г, Д, Е и Ж на :фиг. 7, вид сверху; на фиг. 10 - опорные платформы на тележке, ее механизм при- 20 В отверстии рукоятки 10 имеется паз 34 для вода; на фиг. И - раздвижная рукоят- поводка. |Ка на направляющей, разрез по линии Б на 1ФИГ. 7; на фиг. 12 - схема переда- точного механизма ручного привода.
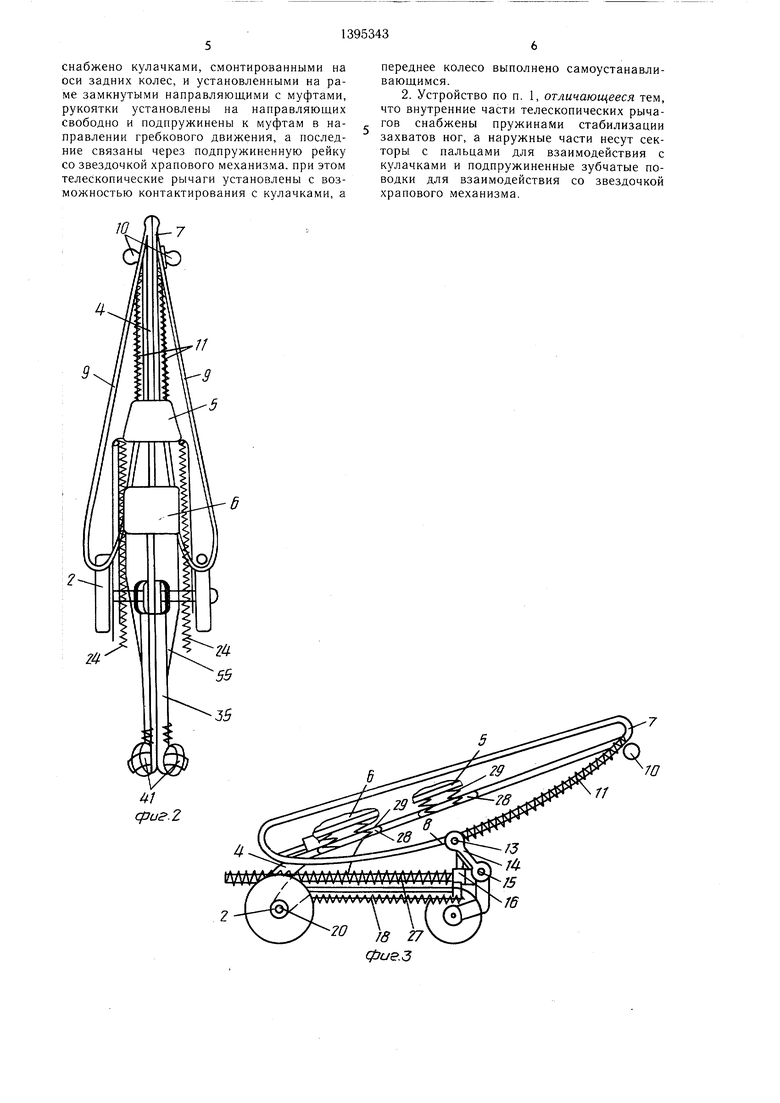
Устройство содержит тележку, имеющую рам.у 1, задние ведущие колеса 2, самоустанавливающиеся передние колеса 3 (фиг. 4), консоль 4, на которой закреп- ;Лены передняя 5 (грудная) и задняя 6 (тазовая) части платформы. На консоли закреплены элипсообразные направляющие 7 - -,„ фиксации стопы.
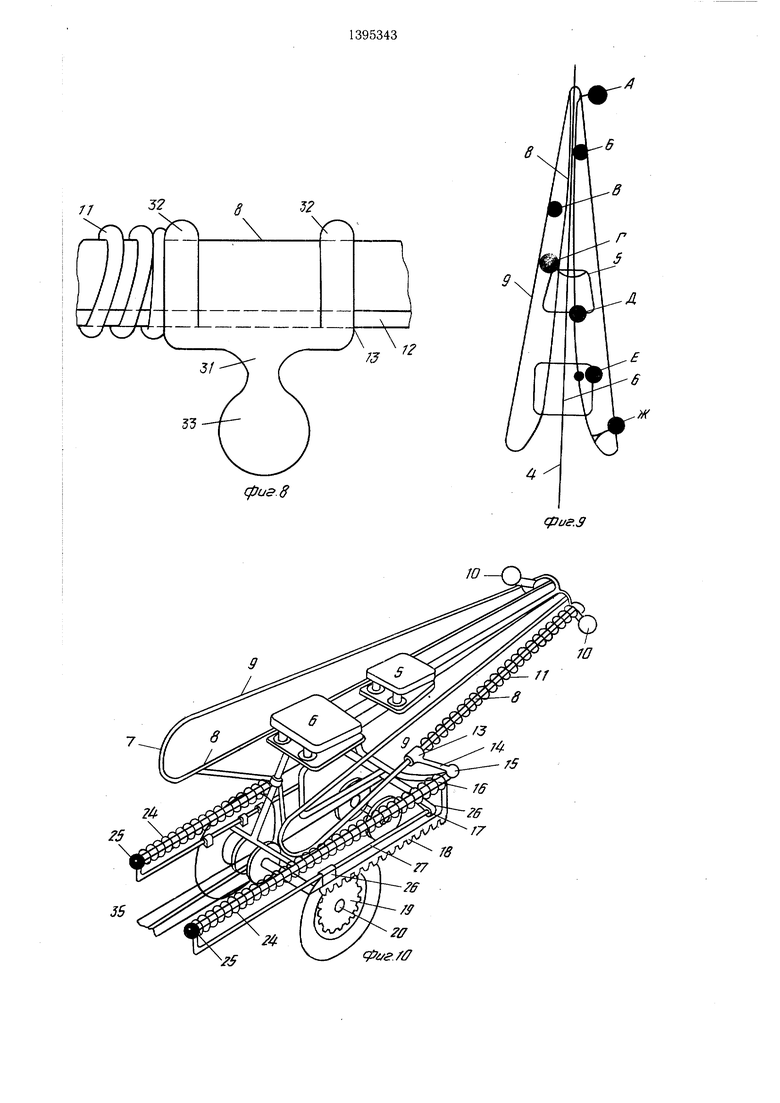
правая и левая, каждая имеет нижнююКорпус захвата в виде стержня 41 помещен в трубку штанги с возможностью ограниченного поворота относительно продольной оси щтанги и перемещения его вдоль этой оси, что достигается окном 42, 1ятки 10, насаженные на нижние ветви 8 г имеющимся в трубке щтанги, через которое |направляющих и подпружиненные впереди пропущен фиксирующий винт 43, ввинчен- амортизационными пружинами 11. Вдоль ный в тело штанги.
каждой нижней ветви направляющей 8 зак-Передняя часть штанги выполнена в виде
реплен поводок 12, проходящий через вы- сектора 44, своим отверстием 45 насажен- рез, имеющийся в отверстии рукоятки 10. ного на палец 46, закрепленный на крон- Задний торец пружины 11 упирается в 40 штейне 47 консоли. На этом секторе, на оси 48 подвижную шарнирную муфту 13, насажен- подвижно закреплен зубчатый поводок 49,
подпружиненный пружиной 50 к зубчатому колесу 51, закрепленному на оси задних колес. Рядом с зубчатым колесом на этой
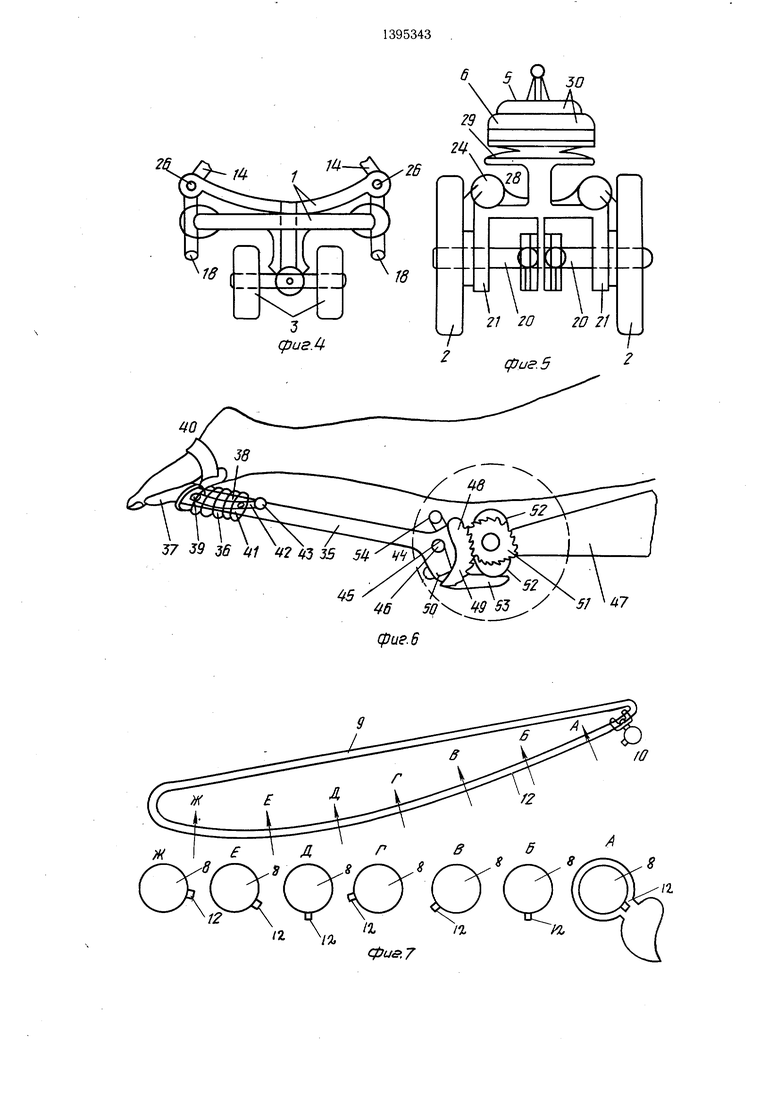
лены амортизационные пружины 29. Сверху последних прикреплены «плавающие опорные «подущки 30. Рукоятки имеют корпус 31, два кольца 32 и захватной щар 33.
Ножной привод устройства имеет две телескопические штанги 35, сзади каждой из которых закреплен подвижный, подпружиненный пружиной 36 ножной захват, состоящий из двух (передней 37 и задней 38) пластин, сочлененных своими проушинами с помещенной в них осью 39, являющейся шарниром захвата. На задней пластине 38 захвата прикреплен ремень 40
:ведущую 8 ветвь и верхнюю 9, контакт- но-направляющую ветвь.
На раме 1 тележки- смонтирован ручной приводной механизм, содержащий две руконую на эту направляющую (для поводка имеется вырез) и шарнирно сочлененную (шарнир 13) с тягой 14.
Нижний конец тяги 14 шарнирно через . же оси закреплен двойной кулачок (экс- шарнир 15 сочленен с обоймой 16, наса- центрик) 52, который вращается вместе с женной на закрепленный на передней час- осью и взаимодействует с пальцевидным ти рамы шток 17 и имеющей прикреп- рычагом 53, закрепленным на секторе 44 ленную к ней зубчатую рейку 18, опи- штанги. На секторе имеются ограничитель- рающуюся зубами на зубчат ое колесо 19, ные упоры 54, удерживающие штангу в свободно насаженное на оси 20 задних ко- о рабочем диапазоне. Для фиксации штанги лес. Эта ось помещена в проушинах 21, имеют ребра 55 жесткости, имеющихся на горизонтальной части рамы
тележки.
Задние колеса закреплены на оси и взаимодействуют с зубчатым колесом посредством храповика, колесом которого являет- 55 а руками берется за рукоятку 10 и да- ся само зубчатое колесо 19. Собачка хра- лее осуществляет гребковые движения так, повика закреплена подвижно на оси 22 на диске заднего колеса с внутренней стороНользуются устройством следующим образом.
Пловец ложится на платформу, вкладывает носки ног в ремни 40 захватов 41,
как требуется при плавании способом кроль на груди, т. е. попеременно, напри1395343
ны и подпружинена пружиной 23 к зубчатому колесу.
На штоки 17 насажены толкающие пружины 24, которые передними торцами упи- раются Б обоймы 16, а задними - во фланцы 25 штоков. Для направления переме- шения зубчатого полотна его задняя и передняя части имеют выступы с отверстиями (проушинами) 26, которыми плотно насажены на направляющую 27 с воз- можностью продольного перемещения на этой направляющей, которая закреплена спереди на раме 1, а сзади - на фланце 25 штока.
Обе части платформы (тазовая и грудная) закреплень на консоли 4 своими опор- ными пластинами 28, на которых закреп- В отверстии рукоятки 10 имеется паз 34 для поводка.
ная) закреплень на консоли 4 своими опор- ными пластинами 28, на которых закреп- В отверстии рукоятки 10 имеется паз 34 для поводка.
лены амортизационные пружины 29. Сверху последних прикреплены «плавающие опорные «подущки 30. Рукоятки имеют корпус 31, два кольца 32 и захватной щар 33.
ная) закреплень на консоли 4 своими опор- ными пластинами 28, на которых закреп- В отверстии рукоятки 10 имеется паз 34 для поводка.
фиксации стопы.
Ножной привод устройства имеет две телескопические штанги 35, сзади каждой из которых закреплен подвижный, подпружиненный пружиной 36 ножной захват, состоящий из двух (передней 37 и задней 38) пластин, сочлененных своими проушинами с помещенной в них осью 39, являющейся шарниром захвата. На задней пластине 38 захвата прикреплен ремень 40
же оси закреплен двойной кулачок (экс- центрик) 52, который вращается вместе с осью и взаимодействует с пальцевидным рычагом 53, закрепленным на секторе 44 штанги. На секторе имеются ограничитель- ные упоры 54, удерживающие штангу в рабочем диапазоне. Для фиксации штанги имеют ребра 55 жесткости,
а руками берется за рукоятку 10 и да- лее осуществляет гребковые движения так,
Нользуются устройством следующим образом.
Пловец ложится на платформу, вкладывает носки ног в ремни 40 захватов 41,
а руками берется за рукоятку 10 и да- лее осуществляет гребковые движения так,
как требуется при плавании способом кроль на груди, т. е. попеременно, например, сначала правой рукой, а затем левой. При этом рукоятка 10 движется спереди- назад по траектории, задаваемой нижней ветвью 8, и одновременно поворачивается относительно оси этой направляющей. Дви- жение вперед-вниз-назад, а затем, в конце гребка и вверх, задается этой ветвью. Поворот рукоятки задается поводком 12, закрепленным вдоль этой направляющей и огибающим ее (фиг. 7),
Таким образом, задается форма движе- ния руки, например серпообразная, характерная для современного стиля «кроль на груди. Движение рукоятки 10 передается на ведущие колеса 2. Сначала, с движением рукоятки 10 амортизационно-передаю- щая пружина 11 сжимается и ее усилие направляется на перемещение назад подвижной муфты 13, которая увлекает за собой тягу 14. Через шарнир 15 это усилие передается на сжатие толкающей пружины 24. Последняя максимально сжимает- ся при движении рукоятки 10 в прежнее заднее верхнее положение по отношению к направляющей 8. С движением назад муфты 13 одновременно подается назад скрепленное с нею зубчатое полотно 18, ко- торое своими пружинами 26 скользит по направляющей 27.
Полотно вращает зубчатое колесо 19 против часовой стрелки, а храповик 22 обеспечивает свободное вращение его без передачи усилия на ось 20 ведущих колес 2, т. е. вхолостую. После завершения гребка пловец снимает руку с рукоятки 10 - освобождает ее и она под действием пружины, 11, а затем и толкающей пружины 24 возвращается в исходное переднее верхнее положение.
Скопленный во время сжатия толкающей пружины 24 потенциал, высвобождаясь, подает зубчатое полотно 18 вперед и вращает зубчатое колесо 19 по часовой стрелке. Храповик обеспечивает зацепление этого колеса с диском ведущего колеса 2 и его вращение в том направлении, что перемещает тележку вперед.
Опережение срабатывания пружины 11 по сравнению с активностью пружины 24 определяется различными массами, которые эти пружины перемещают вперед после сжатия. Пружина 11 перемещает вперед легкую рукоятку 10, а пружина 24 - тяжелую тележку. Такая последовательность в срабатывании указанных пружин положительная: катапультирование рукоятки 10 вперед после гребка происходит с меньщей силой и она подается вперед медленнее, особенно в передней части направляющей 8.
При работе рук включаются в работу и ноги пловца. Когда тележка двигается вперед, ее ось 20 вращается по часовой стрелке. При этом вращаются также закрепленные на ней двойные кулачки 52. Опирающиеся на них рычаги 53 начинают
0 5
0 5
5 0
5
0
то подниматься (при подходе ложбины кулачка 52), то опускаться (при подходе крутизны). Таким образом, штанги 35 начинают колебательные движения: их захваты 41 то опускаются (гребок ногой), то поднимаются (занос ноги на очередной гребок).
Эти движения происходят в пределах амплитуды, задаваемой раствором между ограничительными упорами 48, имеющимися на кронштейне 47. Штанги перемещающегося кронштейне 47. Штанги перемещаются попеременно, так как двойные кулачки 52 (для левой и правой ног) смещены относительно друг друга на 90°. Важно чтобы гребковое усилие пловца не пропадало даром. Для этого при движении щтанги вниз косые зубья поводка 49 захватывают косые зубья зубчатого колеса 51 и оно дополнительно проворачивается по часовой стрелке, вращая в этом же направлении ось 20 ведущих колес 2.
При движении штанги вверх (занос) зубья проскальзывают (пружина 50 попускает поводок 49) и это усилие пловца ногой вверх на ось 20 и колеса 2 не передается - штанга свободно перемещается вверх. Аналогичным образом действует и левая половина устройства при нажатии левой рукоятки 10.
После гребка рука пловца перемещается вперед - в исходное положение для очередного гребка. Данный перенос осуществляется вдоль верхней ветки 9 направляющей, которая путем соприкосновения с рукой дает правильное направление этому движению руки. Скручивание тела пловца в различных направлениях обеспечивается при работе тем, что платформа выполнена из двух частей 5 и б, а «подушка укреплена на опорных пластинах 28 с помощью амортизационных пружин 20. Левая и правая половины устройства независимым в своей работе. Это очень важно, так как позволяет отрабатывать «наложение, характерное для плавания «кролем, когда движение другой рукой начинается, не дожидаясь окончания движения одной рукой. Пловец как бы карабкается вперед, что важно для отработки высокого уровня спортивного мастерства пловцов.
Формула изобретения
1. Устройство для тренировки пловцов, содержащее платформу для размещения пловца, установленную на раме с колесами, переднее из которых шарнирно связано с рамой, а задние кинематически связаны через установленные на их оси хра- повые механиз.мы с телескопическими ножными рычагами, и рукоятки, отличающееся тем, что, с целью повышения эффективности тренировки путем отработки координации движений реального плавания, оно
снабжено кулачками, смонтированными на оси задних колес, и установленными на раме замкнутыми направляющими с муфтами, рукоятки установлены на нанравляюндих свободно и подпружинены к муфтам в направлении гребкового движения, а последние связаны через подпружиненную рейку со звездочкой храпового механизма, при этом телескопические рычаги установлены с возможностью контактирования с кулачками, а
переднее колесо выполнено самоустанавливающимся.
2. Устройство по п. 1, отличающееся тем, что внутренние части телескопических рычагов снабжены пружинами стабилизации захватов ног, а наружные части несут секторы с пальцами для взаимодействия с кулачками и подпружиненные зубчатые поводки для взаимодействия со звездочкой храпового механизма.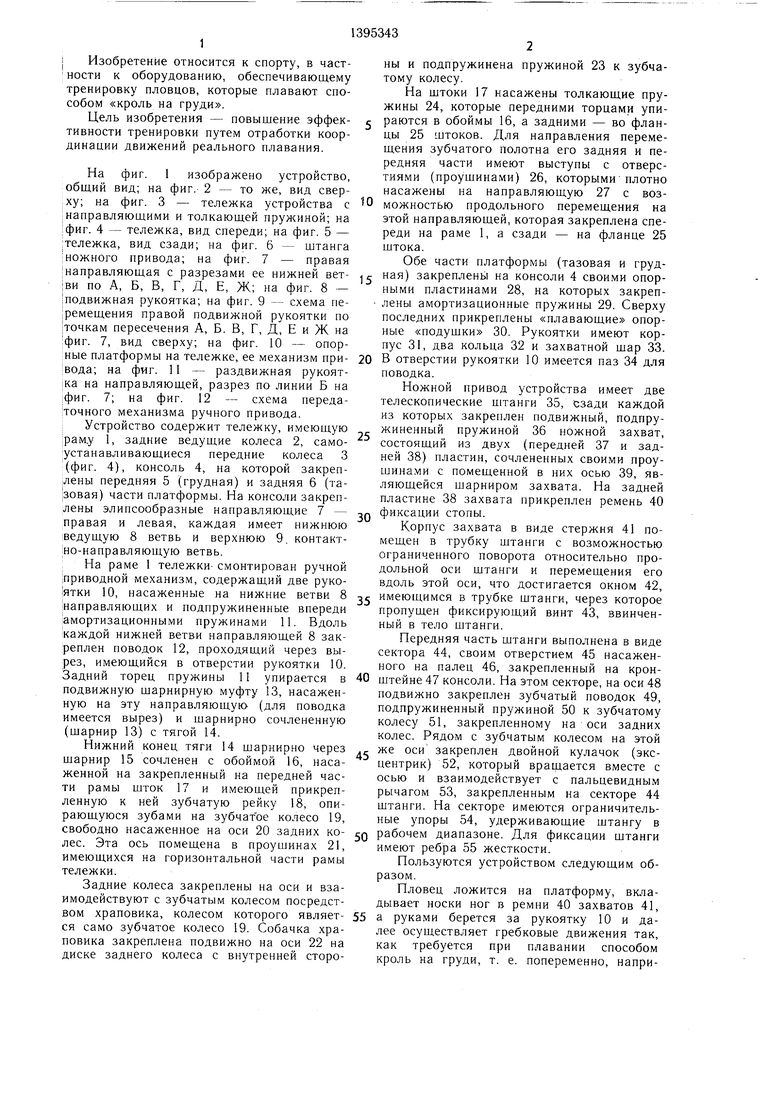

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭРГОМЕТР | 1990 |
|
RU2015684C1 |
| Устройство для тренировки пловцов | 1988 |
|
SU1523154A1 |
| Устройство для тренировки пловцов | 1988 |
|
SU1567228A1 |
| Устройство для тренировки пловцов | 1989 |
|
SU1646560A1 |
| Устройство для тренировки спортсменов | 1983 |
|
SU1151249A1 |
| Устройство для тренировки пловцов | 1986 |
|
SU1378873A1 |
| Устройство для тренировки пловцов | 1979 |
|
SU874081A1 |
| Устройство для тренировки пловцов-брассистов | 1987 |
|
SU1443905A1 |
| Устройство для тренировки ног пловцов | 1984 |
|
SU1217438A1 |
| Тренажер гребца "Турист | 1987 |
|
SU1498521A1 |
Изобретение позволяет повысить эффективность тренировки путем обеспечения отработки координации движений реального плавания. Устройство содержит раму 1 с платформой из двух частей 5 и 6 для размещения пловца. Рама установлена на колесах. Переднее колесо 3 - самоустанавливающееся. Задние колеса 2 кинематически связаны с рукоятками 10 и ножными захватами 37. Последние подпру- жиненно установлены на телескопических рычагах 35. Рычаги связаны через зубчатую передачу с храповым механизмом, установленным на оси задних колес. На этой оси установлены два кулачка. Рычаги контактируют с этими кулачками. Рукоятки 10 установлены подвижно на эллипсовидных направляющих 8 и подпружинены к муфтам 13. Муфты связаны с зубчатой рейкой 18. Последняя подпружинена к раме 1 и взаимодействует со звездочкой храпового Механизма. 1 з. п. ф-лы, 12 ил. S (Л
ш
7
11
35
0 J8 27 фиг.З
57 J5 j n tt2 «3 is 5lf.
5
7Г
/2
/il
30
2
18
6 5IJ cpue.6
5/ 47
фи.Т
сриэ.8
SS
(риг.З
JO(flue. 72
J
фиг.П
| Устройство для тренировки спортсменов | 1983 |
|
SU1151249A1 |
| Способ приготовления сернистого красителя защитного цвета | 1915 |
|
SU63A1 |
