Изобретение относится к обработке металлов давлением, в частности к устройствам для гибки, содержащим верхние и нижние пуансоны.
Известно устройство для гибки листов, содержащее верхний пуансон, установленный в держателе с возможностью возвратно-поступательного перемещения относительно станины в плоскости, перпендикулярной плоскости листа, и два нижних гибочных пуансона, расположенных напротив верхнего, установленных с возможностью поворота вокруг оси, проходящей параллельно гибочным кромкам пуансона и расположенной в зоне гибки, и связанные с механизмом их поворота.
Задачей изобретения является обеспечение гибки листов с получением острых сгибов при сравнительно незначительных затратах энергии. С этой целью устройство снабжено основанием, смонтированным с возможностью вертикального возвратно-поступательного перемещения, верхний пуансон вместе с держателем размещен на этом основании и установлен с возможностью поворота вокруг оси, проходящей вдоль гибочной кромки пуансона в зоне гибки.
Горизонтальная ось поворота верхнего пуансона в его нижнем рабочем положении может совпадать по крайней мере с общей осью поворота нижних гибочных пуансонов.
Устройство может быть снабжено несколькими распределенными по ширине устройства парами угловых рычагов, связанных каждая в центре шарниром, а нижние пуансоны соединены между собой посредством этих пар.
Устройство может быть также снабжено ползушками, а каждый угловой рычаг может быть связан с одним из гибочных пуансонов с одной стороны посредством шарнира, а с другой - посредством ползушки, размещенной в пазу, выполненном в другом пуансоне с возможностью поступательного перемещения. Механизм поворота нижних гибочных пуансонов может быть выполнен в виде нескольких зубчатореечных передач, распределенных по ширине устройства.
Зубчатореечные передачи расположены попарно симметрично и могут быть связаны с общим приводным двигателем. Рейки зубчатореечных передач могут быть смонтированы на каждом из нижних гибочных пуансонов, а зубчатые шестерни - на валах. Последние могут быть связаны зацеплением.
На фиг.1 дано схематическое аксонометрическое изображение листогибочного устройства в нерабочем состоянии; на фиг.2 - аналогичное схематическое аксонометрическое изображение листогибочного устройства с противоположной стороны; на фиг. 3 - аксонометрическое изображение листогибочного устройства, аналогичное фиг. 1 в рабочем фазе, при которой начинается гибка листа; на фиг.4 - соответствующее изображение листогибочного устройства, в котором подлежащий гибке лист по большей части согнут; на фиг.5 - то же, в конце процесса гибки; на фиг.6 - схематическое изображение, частично в разрезе с торца основного рабочего узла листогибочного устройства в нерабочем положении, аналогичном фиг.1; на фиг.7 - схематическое изображение с торца рабочего узла листогибочного устройства, аналогичное изображению фиг.2, но в начале процесса гибки; на фиг.8 - вид с торца на рабочий узел, аналогичный изображению фиг.4, при почти окончательно согнутом листе; на фиг.9 - вид с торца на рабочие узлы листогибочного устройства в конце процесса гибки в изображении рабочей фазы согласно фиг.5; на фиг.10 и 11 - схематический вид с торца на гибочные инструменты при гибке листов различной толщины, фазы в начале и конце процесса гибки; на фиг.12 - вид с торца одной из форм выполнения устройства с измененными нижними гибочными пуансонами; на фиг.13 - схематическое изображение части нижнего гибочного пуансона другой формы исполнения; на фиг.14 - схематически представлено поперечное сечение через верхнюю часть одного из нижних, например левого, изображенного на фиг.6 гибочного пуансона по линии ХIV-XIV на фиг.15 (для наглядности без опор и направляющих пазов в гибочном пуансоне); на фиг.15 - часть внутренней стороны нижнего пуансона, в направлении стрелки XV на фиг.14; на фиг.16 - аксонометрическое изображение двойного углового рычага, служащего для шарнирного соединения опоры и направленного перемещения нижнего гибочного пуансона; на фиг. 17 - разрез аналогично фиг.14, но с двойным угловым рычагом по линии XVII-XVII на фиг.18; на фиг.18 - вид по линии XVIII на фиг.17, разрез; на фиг. 19-21 - разрезы, аналогичные фиг.14 и 17, но с двумя нижними гибочными пуансонами, а также с двойным угловым рычагом для наглядности в различных фазах во время поворота нижнего гибочного пуансона; на фиг.22 - схематическое наглядное изображение пуансона другого устройства для гибки; на фиг.23, 24 и 25 - схематично вид с торца, аналогичный фиг.10 и 11, различные фазы гибки листа с помощью листогибочного устройства на фиг.22 (на фиг.23 показана начальная фаза); на фиг.24 - промежуточная фаза; на фиг.25 - заключительная фаза; на фиг.26 - схематически вид с торца, соответствующий фиг.7, но другого устройства для гибки, причем исходное положение гибочного устройства показано сплошной линией, а промежуточное положение - пунктирной линией.
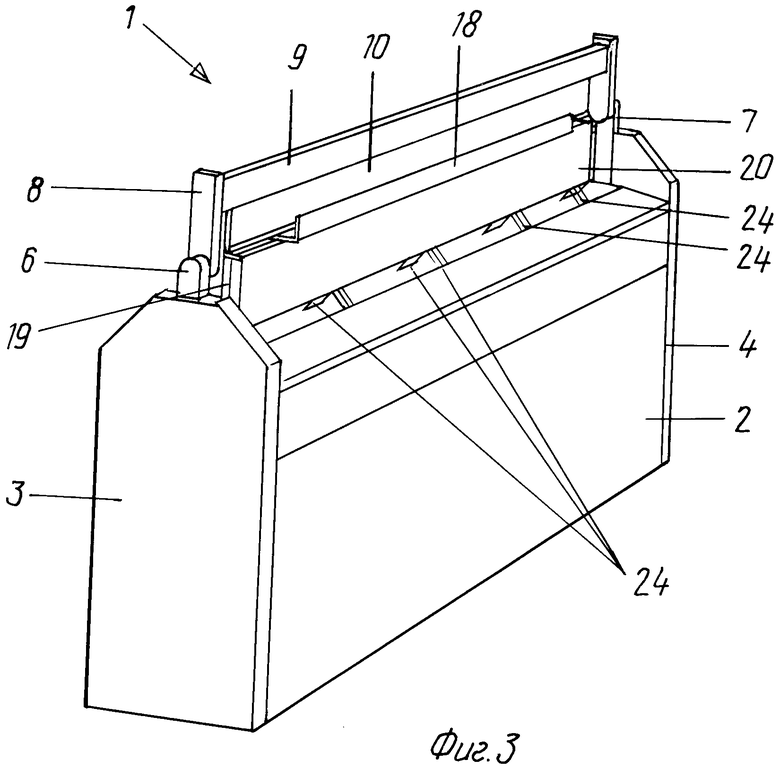
Согласно фиг.1-9 листогибочное устройство 1 или гибочный пресс в особо предпочтительной форме выполнения имеет нижнюю станину 2, на которой в торцевых основных стойках 3, 4 расположены вертикальные направляющие 5, в которых возвратно-поступательно перемещаются в вертикальном направлении стержнеобразные держатели 6, 7. Эти держатели 6, 7 несут верхний держатель 8 с поперечиной 9, на которой съемно закреплен верхний, имеющий форму траверсы или ножа пуансон (верхний гибочный инструмент или верхний гибочный пуансон) 10, причем держатель 8 для верхнего пуансона 10 опирается с возможностью свободного поворота в схематично показанных на чертеже поворотных шарнирах 11, 12 на держателях 6, 7. Эта опора с возможностью поворота описана более подробно ниже. Ось поворота, проходящая через поворотные шарниры 11, 12 держателя 8, крепящегося на держателях 6, 7, проходит предпочтительно вдоль нижней кромки 13 верхнего гибочного пуансона 10, выполненной в виде лезвия.
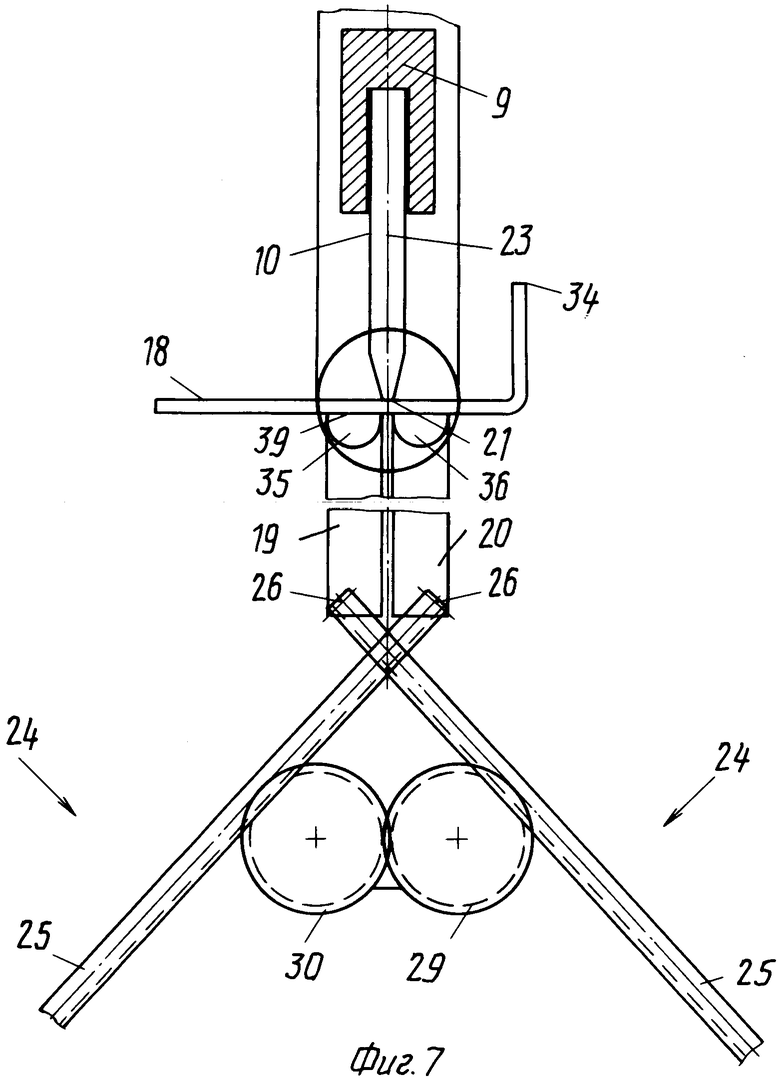
Для вертикального возвратно-поступательного перемещения верхнего пуансона 10 держатели 6, 7 соединены с шпиндельным приводом 14. При этом привод 14 имеет шпиндели 15, приводимые от двигателя 16 в случае необходимости через промежуточную передачу и муфту (не показаны), которые взаимодействуют со шпиндельной гайкой 17, предусмотренной на нижней стороне держателей 6, 7 для обеспечения возвратно-поступательного перемещения держателей 6 или 7 в их направляющих 5 при вращении шпинделя 16. Шпиндельный привод 14, а также другие приводные устройства закреплены на станине 2 известным способом. Для гибки листа 18 на станине 2 закреплены два нижних, выполненных, в частности, в виде пластины или траверсы гибочных пуансона (нижние гибочные инструменты или нижние пуансоны) 19, 20. Пуансоны 19, 20 установлены с возможностью поворота на станине 2, например, с помощью расположенных со стороны торца двойных рычажных систем или криволинейных направляющих. Перемещение пуансонов 19, 20 с поворотом поясняют фиг.14-21. Другой пример перемещения показан на фиг.26. На основе этого направленного перемещения пуансоны 19, 20 имеют возможность поворота вокруг по меньшей мере общей оси 21 поворота (фиг.7 и 8), расположенной в зоне изготавливаемого сгиба 22 сгибаемого листа 18, в частности лежащей также в плоскости 23 вертикального возвратно-поступательного перемещения верхнего пуансона 10. Ось поворота 21 совпадает при этом с осью, проходящей через поворотные шарниры 10, 11 для поворота верхнего пуансона 10 вместе с его держателем 6, 7, когда верхний пуансон 10 находится в рабочем положении согласно фиг.3-5 или 7-9, на которых он представлен при гибке в виде стационарного контринструмента. При этом на фиг. 6-9 и 12 отсутствуют перемещающиеся возвратно-поступательно держатели 6, 7, а схематически показаны держатель 8 с верхним пуансоном, а также шарниры 10, 11.
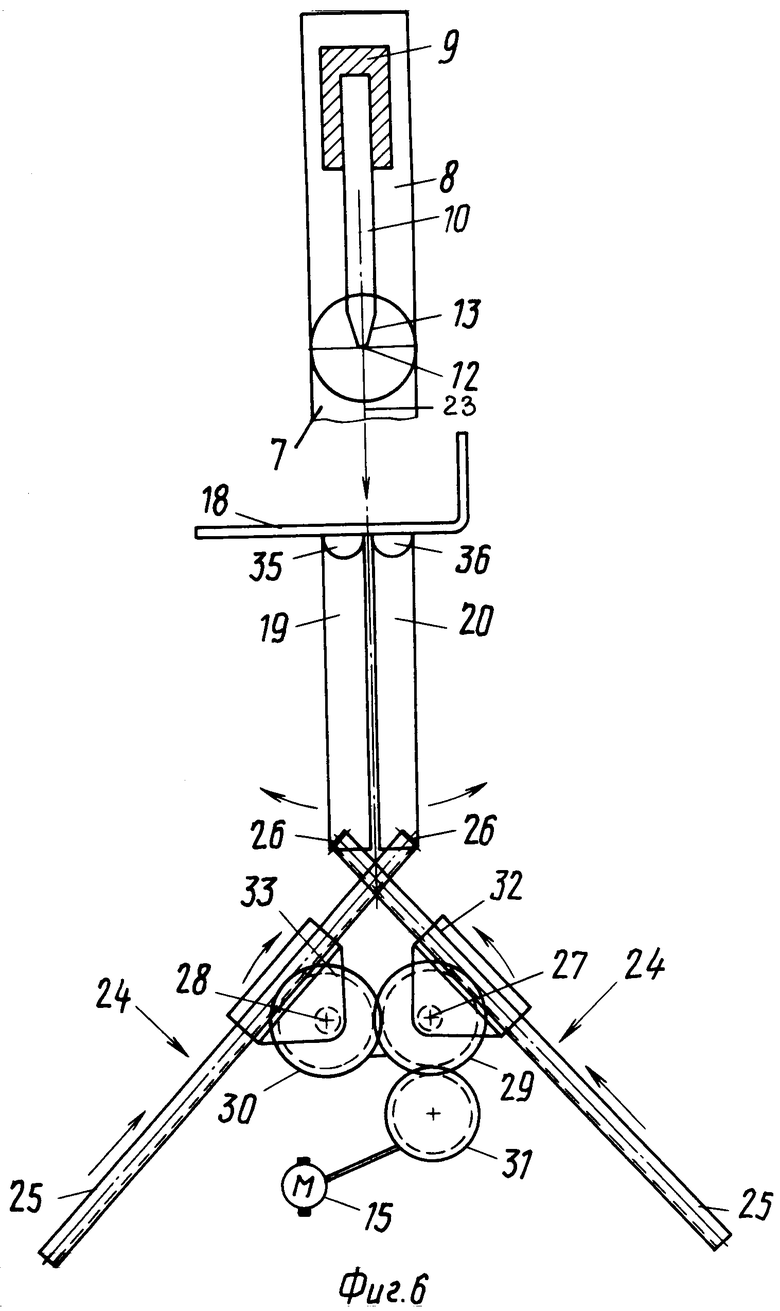
В качестве привода поворота нижних гибочных пуансонов 19, 20 вокруг совместной оси 21 поворота служит механизм поворота, содержащий несколько распределенных по ширине гибочного устройства 1 (фиг.1-5) передач 24 с зубчатой штангой. Пpи этом каждая зубчатая штанга 25 соединена с помощью шарнира с нижней зоной 26 соответствующего нижнего гибочного пуансона 19 или 20. Зубчатые штанги 25 входят в зацепление с сидящими на валах 27, 28 зубчатыми колесами 29, 30 одинакового диаметра, параллельными друг другу, а также пуансонами 19, 20. Один из валов, например вал 27, приводится предпочтительно от единственного общего приводного двигателя 15, который приводит также шпиндельную передачу 14 для верхнего пуансона 10, причем может иметься промежуточная передача (фиг.6) в виде зубчатого колеса 31, аналогично предусмотренной шпиндельной передачи 14 (не показано).
Валы 27, 28 проходят по всей ширине устройства 1 и расположены торцами, а также в случае необходимости и в промежутках между отдельными зубчатыми передачами 24 в соответствующих опорах (не показаны) в станине 2. На каждую передачу 24 с зубчатой штангой приходится одна зубчатая штанга 25, а также зубчатое колесо 29 или 30, жестко закрепленное на соответствующем валу 27 или 28. При приведении во вращение валов 27, 28 зубчатые штанги 25 перемещаются по длине, причем они поворачивают в противоположные стороны шарнирно соединенные с ними нижние гибочные пуансоны 19, 20 симметричным движением по типу отжатия их друг от друга (фиг.7, исходное нерабочее положение и фиг.8, рабочее положение с разведенными в сторону пуансонами). Для незначительного движения поворота зубчатых штанг 25 вокруг валов 27 или 28 зубчатые штанги могут быть вставлены в трубчатые корпуса 32 и направлены в них (фиг.6), причем корпуса 32 фланцами 33 могут быть установлены на соответствующих валах 27 или 28 с возможностью свободного поворота. Пpи этом зубчатые колеса 29, 30 проходят в прорезях трубчатых корпусов 32, параллельных продольной оси зубчатой штанги 25 для того, чтобы иметь возможность зацепления с расположенными в них зубчатыми штангами 25.
Исходное положение или нерабочее положение листогибочного устройства 1 пояснено на фиг.1, 2 и 6. Верхний пуансон 10 занимает верхнее нерабочее положение над листом 18 и в этом положении вручную или механически подводится к листу 18, подлежащему гибке листогибочного устройства 1. При начале гибки верхний пуансон вместе с его держателем 8 перемещается с помощью держателей 6, 7 в направляющих 5 вперед до тех пор, пока верхний пуансон 10 кромкой 13, расположенной по одной оси с осями 11, 12, не коснется подлежащего гибке листа 18, который перед этим укладывается на нижние гибочные пуансоны 19, 20. В этой фазе лист 18 зажимается практически между тремя гибочными пуансонами 10, 19 и 20, но не изгибается (фиг.3 и 7, 10 и 11).
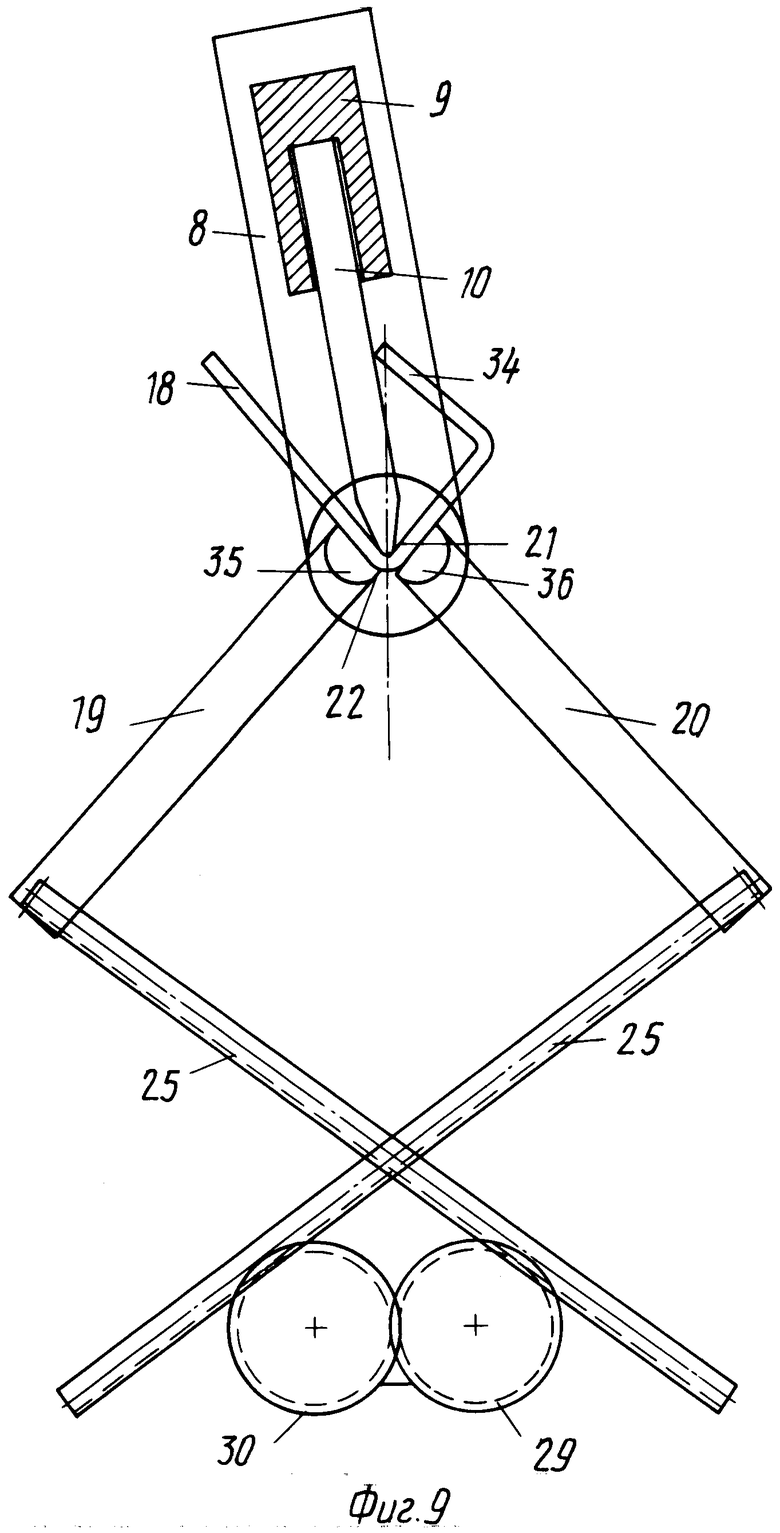
Далее привод соединен, т.е. подключен через муфту (не показана) с приводными валами 27, 28 передачи 24 зубчатых штанг для нижних гибочных пуансонов. Соответственно зубчатые штанги 25 приводятся попарно симметрично под углом, направленным вперед, причем они поворачивают нижние пуансоны 19, 20 в противоположном направлении вокруг общей оси 21 поворота, т.е. (фиг.7 и 8) левый гибочный пуансон 19 поворачивается по часовой стрелке, а правый пуансон 20 - в направлении против часовой стрелки. С помощью поворачивающихся нижних инструментов 19, 20 лист 18 симметрично изгибается при приложении к нему нижней кромки верхнего пуансона 10, при этом получается сгиб 22. Во время процесса гибки целесообразно зафиксировать или застопорить верхний пуансон 10 вместе с его держателем 8, например, с помощью шпиндельной передачи 14 (фиг. 1) в его положении так, чтобы он образовывал стационарный контрпуансон. При этом лист 18 отгибается, например, под углом 90о вдоль гибочной кромки 22 (фиг.4 и 8, 10 и 11), в этом процессе гибки в листе 18 может осуществляться также острый сгиб (см. там же показанную пунктиром позицию нижних гибочных пуансонов 19, 20).
После того, как лист 18 подвергается процессу гибки (фиг.5 и 9), верхний пуансон 10 вместе с его держателем 8 может быть повернут в сторону вокруг оси, определяемой шарнирами 11, 12 (фиг.1), которая в рабочем положении в основном совпадает с осью гибки или осью 21 поворота нижних пуансонов 19, 20, благодаря чему образуется место для уже отогнутого края 34 листа 18.
На этом процесс гибки заканчивается. Приводы меняют направление для того, чтобы снова повернуть гибочные пуансоны 19, 20 в вертикальное исходное положение, а также переместить верхний гибочный пуансон 10 вверх и снова установить его прямо. Теперь согнутый лист 18 может перемещаться дальше на один шаг или извлекаться из устройства 1.
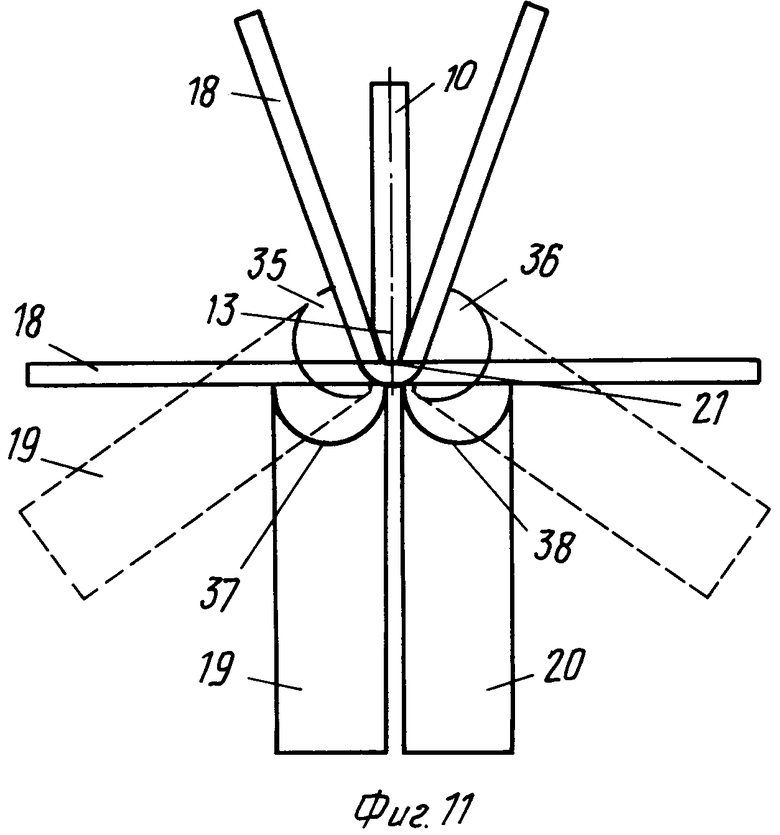
Как видно из фиг. 6-9, а также фиг.10 и 11, нижние поворачивающиеся гибочные пуансоны могут быть снабжены на своих верхних в нерабочем положении сторонах нажимными элементами 35, 36, выполненными в виде штанги и имеющими в поперечном сечении приблизительно полукруглую форму, которая опирается с возможностью свободного поворота на полуцилиндрическое основание 37 или 38 (фиг. 10 и 11) на верхние стороны нижних гибочных пуансонов 19, 20. За счет такого выполнение с поворачивающимися нажимными элементами 35, 36, которые имеют плоскую поверхность 39, обращенную к подлежащему гибке листу 18, можно простыми средствами обеспечить подгонку к любому листу 18, в особенности к листам с различной толщиной.
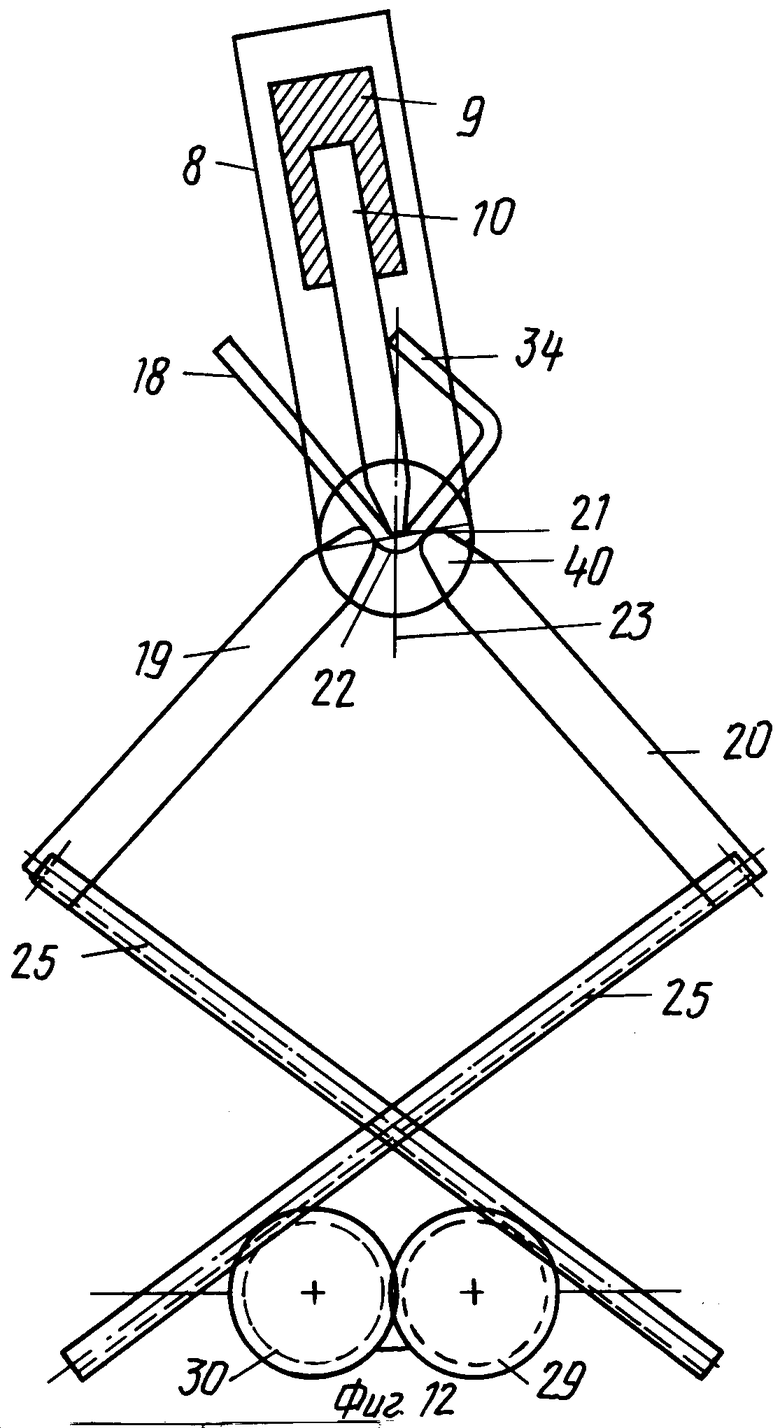
Но вместо этого нижние гибочные пуансоны 19, 20 могут иметь лезвиеобразно выполненную верхнюю сторону с выпуклым закруглением 40 (фиг.12-13). Изображение на фиг.12 соответствует изображению на фиг.9, т.е. заключительная стадия процесса гибки показана с верхним пуансоном 10, повернутым в сторону, в связи с чем нет необходимости в дополнительных пояснениях по сравнению с теми, которые даны в отношении фиг.1-5 или 6-9.
На фиг.13 схематически часть другой формы выполнения нижнего пуансона, например гибочного 19. На верхней стороне этого гибочного пуансона установлен с возможностью поворота нажимной элемент 35 с плоской поверхностью 39. При этом предусмотрены, например, схематически показанные торцевая поворотная цапфа 41, а также желообразное опорное углубление 42 для опоры призматического нажимного элемента 35, имеющего в поперечном сечении приблизительно треугольную форму.
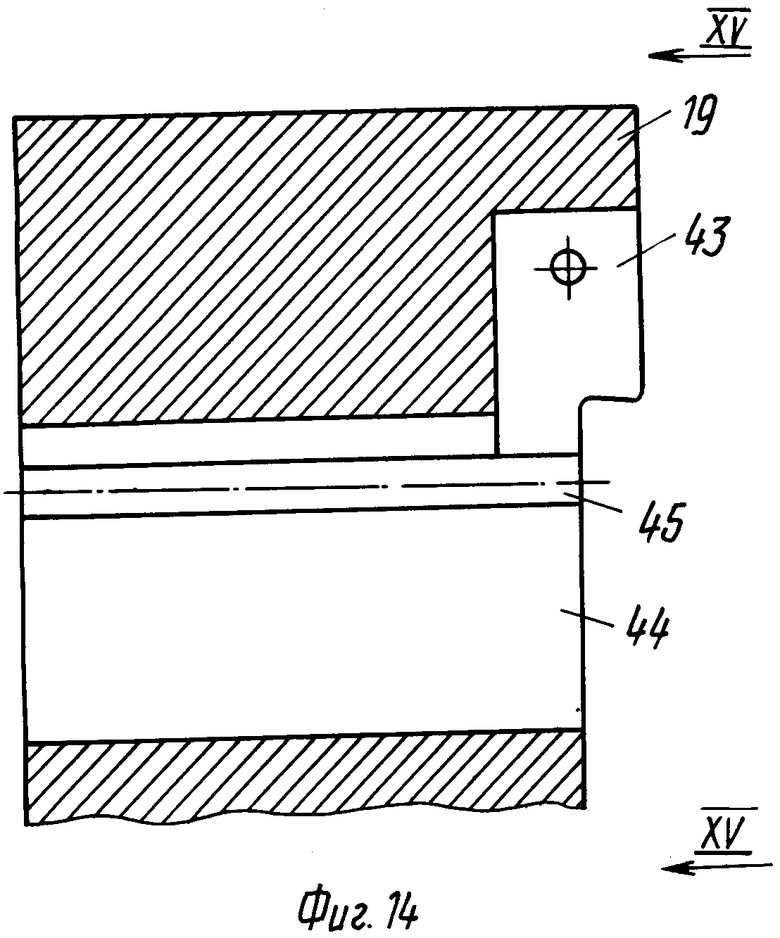
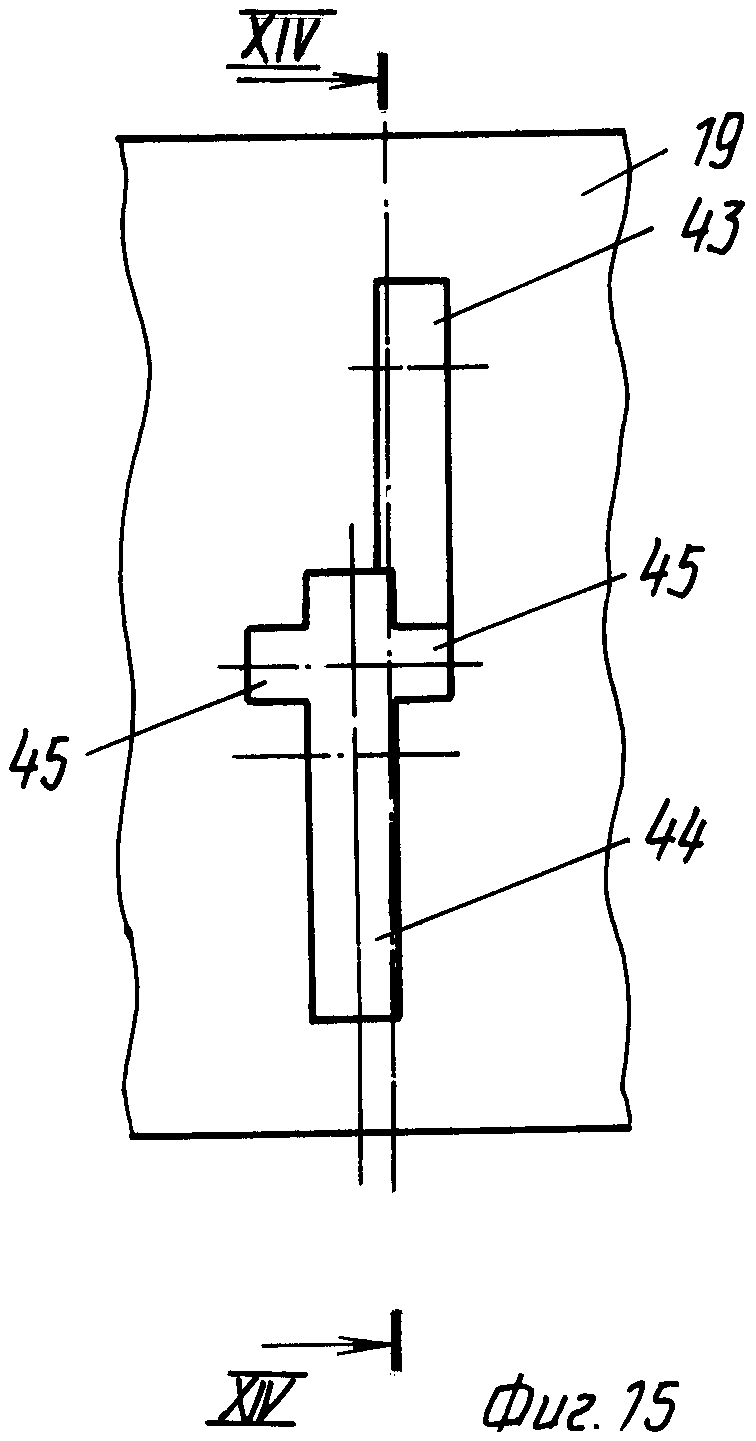
На фиг.14-21 показан пример расположения опоры, шарнирного соединения и направляющей перемещения нижних гибочных пуансонов 19, 20. При этом на фиг. 14 и 17 показана верхняя часть левого нижнего гибочного пуансона 19 согласно фиг. 6, но без нажимного элемента 35 в изображении по поперечному сечению. На фиг.15 и 18 показана эта верхняя часть левого нижнего гибочного пуансона 19, вид с частичным разрезом с внутренней стороны для пояснения формы или профиля опорных и направляющих выемок для угловых рычагов, описываемых ниже. Для пояснения в общем виде этой формы выполнения следует упомянуть о том, что на фиг.14 и 15 показана только верхняя часть нижнего гибочного пуансона 19, в то время как на фиг.17 и 18 - его верхняя часть с парой угловых рычагов. Последняя представлена в схематическом аксонометрическом изображении на фиг.16.
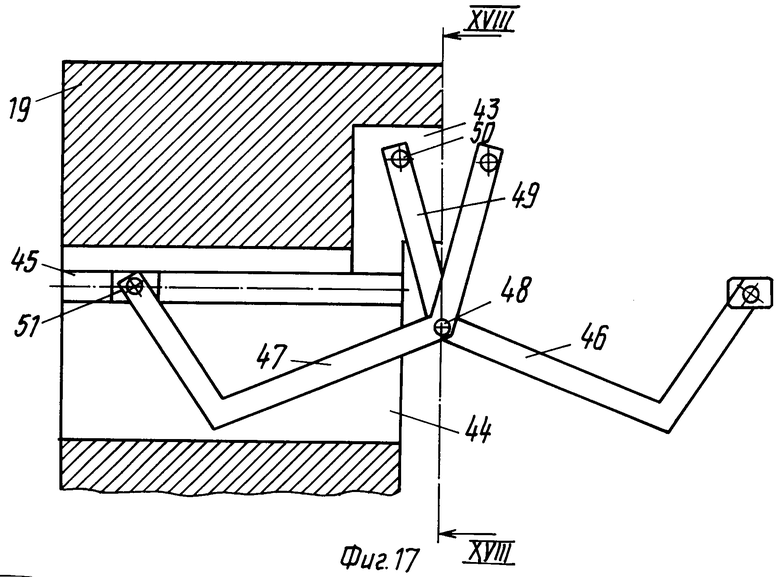
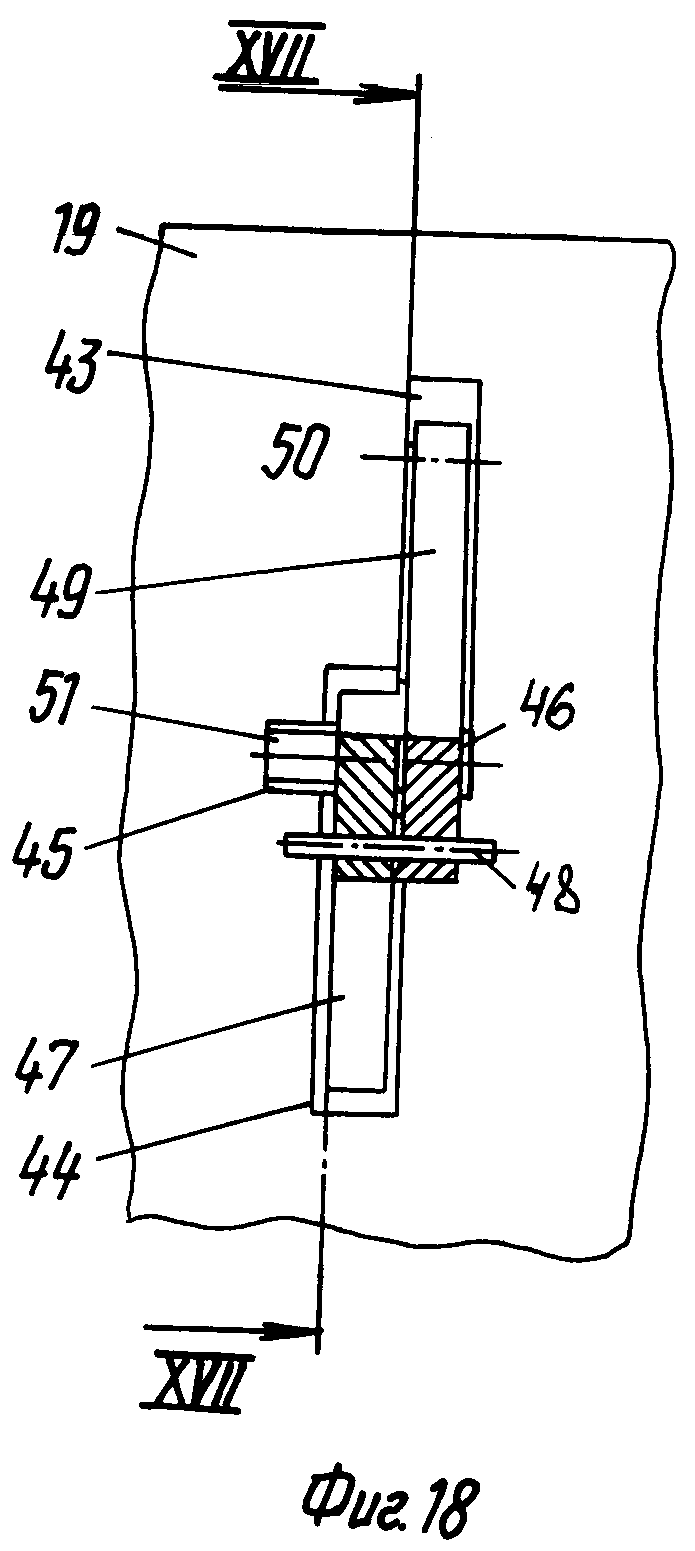
Как видно из фиг.14, 15, 17 и 18, в соответствующих нижних гибочных пуансонах, например в гибочном пуансоне 19, выполнено глухое отверстие 43 для опоры, а также сквозное пазообразное отверстие 44 с прямым пазом 45 скольжения, причем на фиг. 15 видно, что это отверстие 44 образует с пазом 45 крестообразную форму. Для шарнирного соединения нижних гибочных пуансонов 19, 20 (фиг.19-21) служит по меньшей мере одна пара дважды изогнутых угловых рычагов 46, 47, (фиг.16), причем эти угловые рычаги 46, 47 соединены друг с другом в зоне угла с возможностью поворота. При этом для поворотного соединения угловых рычагов 46, 47 служит цапфа 16, а также сквозная ось, проходящая по всей ширине гибочного устройства (фиг.1-5), причем такое выполнение предусматривается в том случае, если по ширине устройства 1 для гибки распределено несколько таких пар рычагов аналогично описанному выше для передачи 24 зубчатыми штангами.
Каждый нижний гибочный пуансон, например гибочный пуансон 19, соединен с одним из угловых рычагов 46, 47 такой пары шарнирно соединенных друг с другом угловых рычагов, в частности в зоне их опорных выемок 43, в которой шарнирно укреплен конец одного из угловых рычагов, например углового рычага 46 (фиг. 14, 17, 18) с возможностью поворота с помощью поворотной цапфы 50 (или же с помощью сквозной поворотной оси). Далее этот нижний гибочный пуансон, например пуансон 19, воспринимает противоположный конец другого углового рычага, в данном случае углового рычага 47, с возможностью перемещения со скольжением в пазу 45 сквозного отверстия или выемки 44. Для этого на конце углового рычага 47 может быть расположена с возможностью поворота пара ползунов 51 и эти ползуны 51 могут линейно перемещаться со скольжением в пазах 45 (фиг. 16, 17 и 18), причем на фиг.18 второй ползун 51 закрыт другим угловым рычагом 46 и поэтому его не видно.
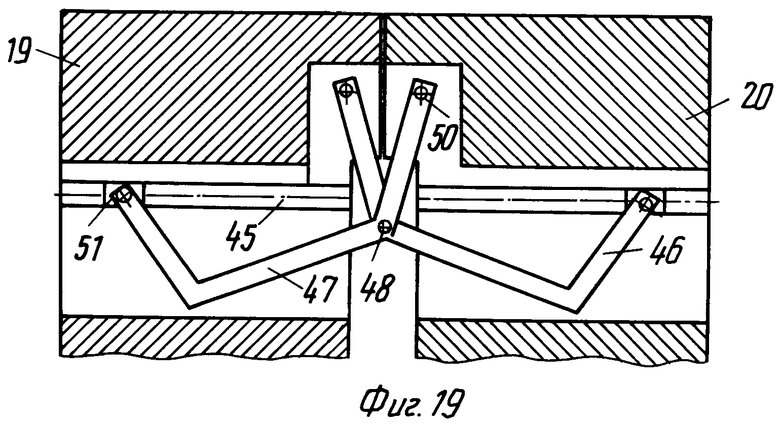
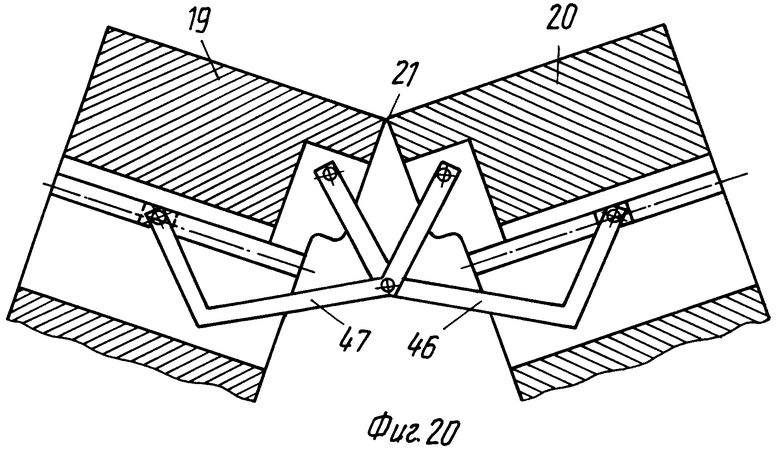
Расположение другого нижнего гибочного пуансона 20 абсолютно идентично, т. е. на другом гибочном пуансоне 20 шарнирно закреплен угловой рычаг 47, относительно которого может перемещаться угловой рычаг 46 (фиг.19-21). Из фиг. 19-21 можно видеть характер перемещений при повороте нижних гибочных пуансонов 19 и 20, если пуансоны 19, 20 поворачиваются, например, с помощью поясненной на фиг.6-9 и не показанной на фиг.14 и 21 передачи 24 с зубчатыми штангами в качестве привода поворота или механизма поворота. Расположение двойных рычагов с парами угловых рычагов 46, 47 гарантирует при этом направленное друг к другу синхронное движение поворота нижних гибочных пуансонов 19, 20 при установлении точного положения воображаемой оси 21 поворота (фиг. 20 и 21). При этом на фиг.19 показано исходное или нерабочее положение, в котором нижние гибочные пуансоны 19, 20 расположены таким образом, что их верхние стороны лежат горизонтально. В положении согласно фиг.20 нижние гибочные пуансоны уже повернуты на часть своего угла поворота, а согласно фиг.21 они занимают, например, окончательное положение поворота. При этом из фиг.19-21 видно, что шарнирная ось 48 пары угловых рычагов 46, 47 в основном перемещается незначительно в вертикальном направлении относительно средней плоскости 23 (фиг.6). В остальном ползуны 51 во время этого поворота скользят в своих направляющих или регулирующих пазах 45, в то время как угловые рычаги 46, 47 поворачиваются противоположными концами относительно соответствующих гибочных пуансонов 19, 20. Что касается поворотной опоры угловых рычагов 46, 47 в нижних гибочных пуансонах 19, 20 (шарнирная ось 50), то возможно использовать в опорных выемках 43 с внутренней стороны или со стороны торца (которые можно видеть на фиг.15) опорные блоки (не показаны), причем в этих опорных блоках установлены с возможностью поворота концы угловых рычагов 46, 47. Эти опорные блоки по своим размерам могут точно соответствовать опорным выемкам 43 и фиксироваться в них с помощью винтов или болтов.
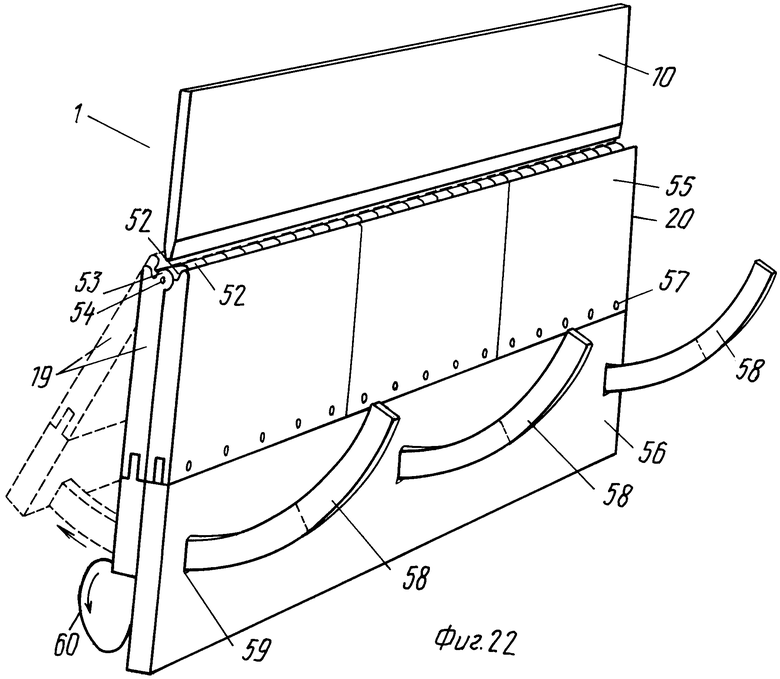
На фиг. 22-25 схематически показано другое листогибочное устройство с основными рабочими элементами, которое полностью соответствует в отношении относительного перемещения их пуансонов или инструментов 10, 19 и 20 вышеописанным примерам выполнения, однако во время процесса гибки стационарно удерживается не верхний пуансон 10, а (фиг.22, 25) правый нижний пуансон 20, в то время как другой нижний пуансон 19 при гибке листа 18 (фиг.23-25) поворачивается, в соответствии с другими примерами выполнения и для осуществления относительного поворота между пуансонами верхний пуансон 10 поворачивается со скоростью, вдвое меньшей угловой скорости поворота левого нижнего пуансона 19, (см. промежуточное положение трех пуансонов на фиг.24, а также конечное положение на фиг.25). Если согласно фиг.22-25 проследить движение верхнего пуансона 10 (их нерабочего положения), то можно увидеть полностью аналогичное движение поворота (как на фиг.1-11). Отдельные фазы движения показаны на фиг.22-25 относительно стационарной станины (не показана более подробно на фиг.22-25). Такая кинематика как в устройстве гибки по фиг.22-25 может быть желательной в том случае, если в подлежащем гибке листе 18 на одной из сторон сгиба должно осуществляться лишь незначительное перемещение, если оно вообще происходит.
В примере выполнения (фиг.22-25) оба нижних пуансона 19-20 соединены шарнирно посредством входящих друг в друга элементов 52, образующих шарнирный элемент 53, причем ось 54 шарнира проходит через весь шарнир. Сбоку шарнирного элемента 53, где пуансоны 10, 20 входят в контакт с подлежащим гибке листом 18, имеется закругленная щека. Оба нижних пуансона 19 могут при этом быть выполнены из отдельных сегментов 55, которые жестко соединены с помощью держателя инструмента или нижней части 56 пуансона с помощью, например, болтов 57 с целью более легкой заменяемости. В качестве привода поворота левого нижнего пуансона 19 могут использоваться кругообразные направляющие 58 с зацеплением, (не показаны на чертеже более подробно), которые проходят через направляющий паз 59 в основании 56 другого нижнего пуансона 20 и входят в зацепление с приводными зубчатыми колесами 60, которые соответствуют зубчатым колесам 29 или 30 (фиг.6-9). Привод для этих зубчатых колес может осуществляться способом, описанным на основе фиг.6-9 через приводной двигатель, а также промежуточную передачу.
На фиг.22 штриховой линией схематически показано, как при повороте зубчатого колеса 60 в направлении против движения часовой стрелки (см. стрелку) левый пуансон 19 поворачивается вперед, т.е. от правого пуансона 20. При этом одновременно с поворотом нижнего пуансона 19 поворачивается и верхний пуансон 10 с угловой скоростью, равной половине скорости поворота нижнего пуансона 19.
Привод верхнего пуансона 10 может при этом осуществляться аналогично приводу нижнего пуансона 19, причем посредством промежуточной передачи обеспечивается необходимое передаточное соотношение 2:1. Такого типа привод сам по себе известен, поэтому нет необходимости пояснять его здесь более подробно.
Опора верхнего пуансона 10 в не показанной более подробно станине (фиг. 22) может быть выполнена аналогично фиг.1-5, т.е. с держателями 6, 7 и расположенным в них с возможностью поворота держателем 8. На фиг.23-25 показана также ось 21 поворота для относительного поворота между нижними гибочными пуансонами 19, 20, которая совпадает с геометрической осью шарнира 54 (фиг.22) шарнирного элемента 53. Вокруг этой оси 21 во время гибки поворачивается также верхний пуансон 10, (фиг.24 и 25). Центр кругообразных направляющих 58 лежит на оси 21 поворота (т.е. геометрической оси шарнира 54).
В примере выполнения согласно фиг.26 оба нижних пуансона 19, 20 поворачиваются симметрично относительно верхнего пуансона 10, который показан здесь только в виде круга, обозначающего кривизну сгиба, причем предусмотрены кругообразные направляющие с соответствующими кругообразными зубчатыми сегментами 61 (для гибочного пуансона 19) или 62 (для гибочного пуансона 20). Выполненные по дуге зубчатые направляющие 61, 62 входят при этом в зацепление с зубчатым колесом 63 (для зубчатой направляющей 61) или 64 (для зубчатой направляющей 62). Зубчатое колесо 63 приводится при этом от общего приводного зубчатого колеса 65, которое может соединяться с двигателем 15 (фиг.6), а зубчатые колеса 63, 64 для их вращения в противоположные стороны зацепляются непосредственно друг с другом аналогично зубчатым колесам 29, 30 (фиг.6).
С зубчатыми направляющими 61 или 62 жестко связаны башмаки 66 или 67, причем эти башмаки 66, 67 выполнены в виде башмаков скольжения в направляющих, снабженных зубчатыми направляющими 61, 62. Посредством башмаков 66, 67 держателя 68, 69 инструмента, в частности нижних инструментов 19, 20, соединены через шарниры 70 или 71 для обеспечения при гибке незначительных компенсационных перемещений нижних инструментов или пуансонов 19, 20 относительно поверхности листа.
Верхний пуансон 10 при гибке листа 19 приводится вертикально снизу, например, с помощью привода, аналогичного шпиндельному приводу 14 (фиг.1), причем этот вертикальный привод связан с движением поворота нижних инструментов 19, 20, например, через числовое программное управление, через компьютер (не показан) для того, чтобы в зависимости от толщины листа обеспечить, что при гибке листа 18, если пуансоны 19, 20 поворачиваются в стороны друг от друга и одновременно верхний пуансон 10 перемещается вперед (см. промежуточное положение при гибке, показанное пунктиром на фиг.26), получается фрикционное замыкание нижних пуансонов 19, 20 с листом 18 и предотвращается относительное перемещение между этими пуансонами и листом вдоль его поверхности. За счет этого обеспечивается особенно благоприятная обработка листа 18 при гибке, при которой исключается повреждение его поверхности.
Не исключаются многочисленные другие варианты выполнения и модификации, не выходящие за рамки изобретения. Так, при гибке более толстых листов можно также установить нижние гибочные пуансоны 19, 20 с возможностью поворота вокруг расположенных на расстоянии друг от друга и параллельных друг другу осей. Можно осуществлять привод гибочных пуансонов 19, 20 или 10, 19 вместо описанных передач с зубчатыми штангами также с помощью рабочих цилиндров. Верхний пуансон 10 может приводиться также с помощью эксцентрикового привода или рабочего цилиндра в возвратно-поступательное перемещение, причем в случае необходимости может осуществляться фиксирование верхнего пуансона 10 в нижнем рабочем положении согласно фиг.3 или 7 посредством простой остановки эксцентрикового привода в этом положении. В качестве приводного двигателя может применяться, например, электродвигатель. Могут применяться кругообразные зубчатые штанги, показанные на фиг.22 или 26, согласно вариантам выполнения, представленным на фиг.1-11 (и наоборот, прямолинейные зубчатые штанги, аналогичные примеру выполнения согласно фиг.22 или 26). Подразделение на отдельные сегменты 55 пуансонов, показанное на фиг.22, может применяться также и в других формах выполнения.












Использование: в обработке металлов давлением, в частности в устройствах, содержащих пуансоны. Сущность: устройство для гибки листов, содержащее верхний пуансон 10, имеющий форму ножа, перемещающийся возвратно-поступательно относительно станины 2, поперечно к плоскости листа и в случае необходимости имеющий возможность поворота, причем пуансон расположен напротив двух пластинчатых нижних пуансонов 19, 20, которые имеют возможность поворота относительно общей оси, проходящей в зоне сгиба листа 18. При этом для поворота пуансона имеется зубчато-реечная передача 24, причем верхний пуансон 10 в рабочем положении прижимается к поверхности подлежащего гибке листа 18 и при этом образует стационарный контрпуансон, вокруг которого лист 18 сгибается посредством нижних пуансонов 19, 20. 8 з. п. ф-лы, 26 ил.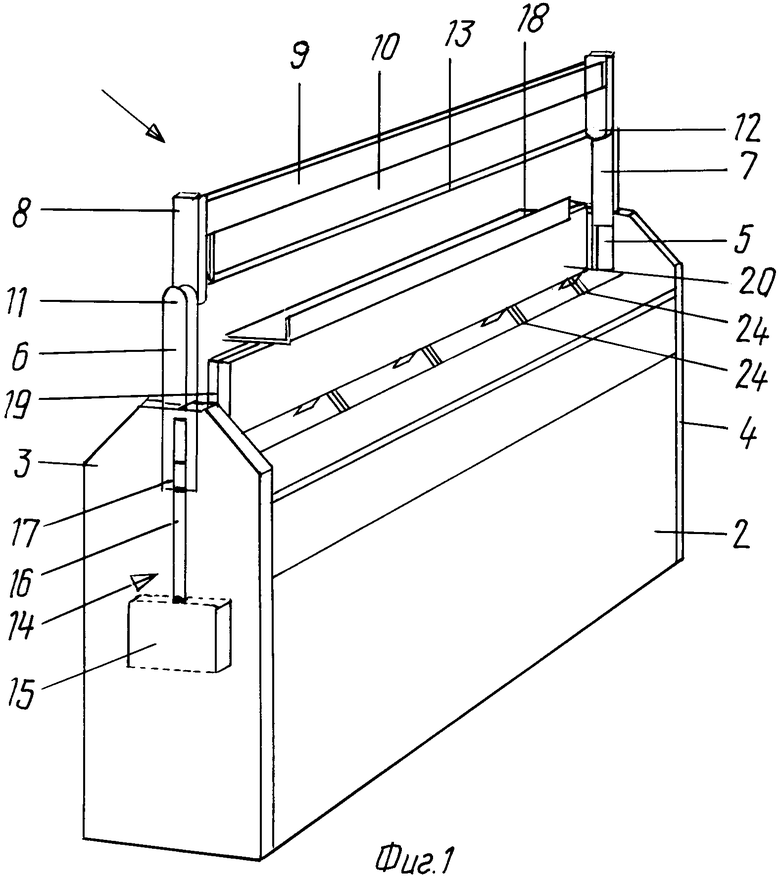
| УСТРОЙСТВО ДЛЯ ОБУЧЕНИЯ ПЛАВАНИЮ | 1987 |
|
RU2050887C1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
