Изобретение относится к механизмам и приборам с многократным резервированием за счет работы от двух двигателей.
Известен механизм поворота кранов, в котором применены коническо-цилиндрические редукторы и используется свойство планетарной передачи суммировать два движения от двух двигателей. Схема позволяет иметь четыре скорости [1].
Известный механизм отличается сложностью конструкции и относительно большими габаритными размерами.
Наиболее близким по технической сущности к изобретению является привод, содержащий два двигателя и дифференциал с цилиндрическими центральными колесами наружного и внутреннего зацепления, кинематически связанными каждое с одним из двигателей, имеющих противоположное вращение, причем кинематическая связь каждого из двигателей с цилиндрическим центральным колесом выполнена в виде цилиндрического колеса, установленного на валу двигателя, а ширина каждого из центральных колес выбрана из условия его одновременного взаимодействия с сателлитом и цилиндрическим колесом кинематической связи, цилиндрические колеса выполнены с одинаковым числом зубьев [2].
Данный привод не обеспечивает при резервировании идентичности параметров движения выходного звена. Этот недостаток изначально заложен в используемом в приводе цилиндрическом дифференциале. Дело в том, что в цилиндрическом дифференциале в отличие от конического дифференциала передаточные отношения от центральных колес к водилу различны, различны и моменты инерции центральных колес.
В рассматриваемом приводе ведущие цилиндрические зубчатые колеса имеют одинаковое число зубцов и сцеплены одно с центральным колесом, а другое с центральным колесом, которые значительно различаются друг от друга числом зубцов. Следовательно, если работает один двигатель, а другой двигатель заторможен, выходной вал имеет одну скорость вращения, а при работающем втором двигателе (первый двигатель заторможен) - другую. Это ограничивает, а в ряде случаев исключает возможность применения такого привода для целей резервирования.
Цель изобретения - обеспечение равнозначных результатов работы механизмов и приборов при переходе работы от одного двигателя к другому.
Цель достигается тем, что в приводе, содержащем два двигателя, оси валов которых параллельны, и дифференциал с цилиндрическими центральными колесами наружного и внутреннего зацепления, кинематически связанными каждое с одним из двигателей, вращение двигателей противоположно, кинематическая связь каждого из них с цилиндрическим центральным колесом выполнена в виде цилиндрического колеса, установленного на валу двигателя, ширина каждого из центральных колес выбрана из условия его одновременного взаимодействия с сателлитами и цилиндрическим колесом кинематической связи, зубчатые пары цилиндрическое колесо кинематической связи - центральное колесо выбраны из условия равенства их передаточных отношений.
На чертеже изображена кинематическая схема привода.
Привод содержит два двигателя 1 и 2 и дифференциал с цилиндрическими центральными колесами наружного 3 и внутреннего 4 зацепления, сателлиты 5 и водило 6. Двигатель 1 кинематически связан с цилиндрическим центральным колесом 3 наружного зацепления посредством цилиндрического колеса 7, а двигатель 2 - с цилиндрическим центральным колесом 4 внутреннего зацепления посредством цилиндрического колеса 8. Двигатели 1 и 2 имеют противоположное вращение.
Ширина каждого из центральных колес 3 и 4 выбрана из условия его одновременного взаимодействия с сателлитом и цилиндрическим колесом кинематической связи.
В каждой зубчатой паре цилиндрическое колесо кинематической связи - центральное колесо число зубьев колес выбрано из условия равенства их передаточных отношений.
Привод работает следующим образом.
Если работает только двигатель 1, а вал двигателя 2 с цилиндрическим колесом 8 заторможен, то центральное колесо 4 неподвижно. Движение передается от цилиндрического колеса 7 центральному колесу 3. Центральное колесо 3 на одной части своей ширины зацепляется с колесом 7, а на другой части - с сателлитами 5. Движение от центрального колеса 3 передается сателлитам 5, которые, перекатываясь по зубьям неподвижного колеса 4, увлекают за собой водило 6, являющееся выходным звеном и связанное с исполнительным органом.
Если движение передается от двигателя 2, а вал двигателя 1 с колесом 7 заторможен, то центральное колесо 3 неподвижно. Движение передается от колеса 8 на центральное колесо 4 с внутренним зацеплением. Центральное колесо 4 частью венца зацепляется с колесом 8, а второй - с сателлитами 5. Движение от центрального колеса 4 передается сателлитам 5, которые, перекатываясь по зубьям неподвижного центрального колеса 3, увлекают за собой водило 6, являющееся выходным звеном.
Если работают оба двигателя 1 и 2 и их вращение противоположно, то цилиндрический дифференциал суммирует эти движения, при этом передаточное отношение от любого двигателя 1 или 2 к выходному звену - водилу 6 получается вдвое меньше.
Таким образом, при переходе работы первого двигателя к работе второго скорость вращения выходного звена остается постоянной.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД ЗАХВАТНОГО УСТРОЙСТВА | 1996 |
|
RU2110721C1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ ДВИЖЕНИЕ | 1998 |
|
RU2139462C1 |
| РЕВЕРСИВНАЯ ПЕРЕДАЧА | 1994 |
|
RU2114344C1 |
| Привод | 1987 |
|
SU1514991A1 |
| Привод ведущего управляемого колеса транспортного средства | 1990 |
|
SU1717424A1 |
| УСТРОЙСТВО ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ ДВИЖЕНИЕ ВЫХОДНОГО ВАЛА | 1998 |
|
RU2139461C1 |
| ПРИВОД ВЕДУЩИХ УПРАВЛЯЕМЫХ КОЛЕС ТРАНСПОРТНОГО СРЕДСТВА | 1997 |
|
RU2127844C1 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1991 |
|
RU2011909C1 |
| Привод резервированный самостопорящийся | 2016 |
|
RU2653606C2 |
| РЫЧАЖНО-ЗУБЧАТЫЙ МЕХАНИЗМ ДЛЯ ПРЕОБРАЗОВАНИЯ ВРАЩАТЕЛЬНОГО ДВИЖЕНИЯ В СЛОЖНОЕ | 1997 |
|
RU2132987C1 |
Изобретение относится к механизмам и приборам с многократным резервированием за счет работы от двух двигателей для суммирования угловых перемещений. Цель изобретения - обеспечение равнозначности результатов работы механизмов и приборов при переходе работы от одного двигателя к другому, а также работы привода при соосном расположении валов двигателей. Для этого в приводе, содержащем два двигателя 1 и 2 и дифференциал с цилиндрическими центральными колесами наружного 3 и внутреннего 4 зацеплений, кинематическая связь с двигателями 1 и 2 противоположного вращения выполнена в виде цилиндрических колес 7 и 8 с числом зубьев, обеспечивающим в каждой зубчатой паре цилиндрическое колесо кинематической связи - центральное колесо одинаковое передаточное отношение, а ширина каждого из центральных колес 3 и 4 выбирается из условия их одновременного взаимодействия с сателлитами 5 и цилиндрическими колесами 7 или 8. 1 ил.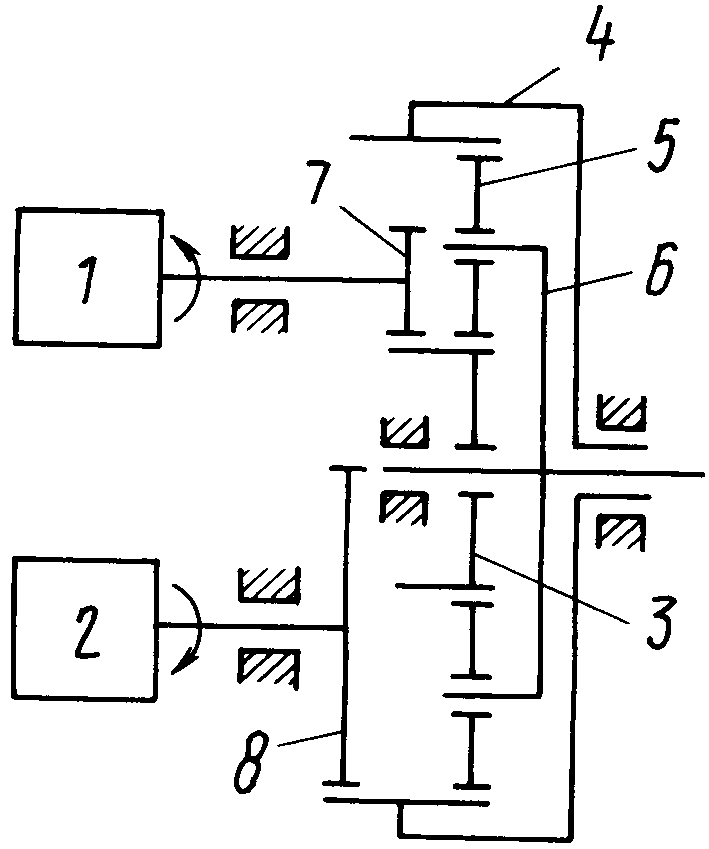
ПРИВОД, содержащий два двигателя, оси валов которых параллельны, и дифференциал с цилиндрическими центральными колесами наружного и внутреннего зацепления, кинематически связанными каждое с одним из двигателей, вращение двигателей противоположно, кинематическая связь каждого из них с цилиндрическим центральным колесом выполнена в виде цилиндрического колеса, установленного на валу двигателя, ширина каждого из центральных колес выбрана из условия его одновременного взаимодействия с сателлитами и цилиндрическим колесом кинематической связи, отличающийся тем, что, с целью обеспечения равнозначности результатов работы механизмов и приборов при переходе работы от одного двигателя к другому, в нем зубчатые пары цилиндрическое колесо кинематической связи - центральное колесо выбраны из условия равенства их передаточных отношений.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Привод | 1987 |
|
SU1514991A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
